ФЕДЕРАЛЬНОЕ АГЕНТСТВО
ПО ТЕХНИЧЕСКОМУ РЕГУЛИРОВАНИЮ И МЕТРОЛОГИИ
|
|
НАЦИОНАЛЬНЫЙ |
ГОСТ
Р ИСО |

Вибрация
ИЗМЕРЕНИЯ ВИБРОАКУСТИЧЕСКИХ
ПЕРЕДАТОЧНЫХ ХАРАКТЕРИСТИК
УПРУГИХ ЭЛЕМЕНТОВ КОНСТРУКЦИЙ
В ЛАБОРАТОРНЫХ УСЛОВИЯХ
Часть 2
Прямой
метод определения
динамической жесткости упругих опор
для поступательной вибрации
ISO 10846-2:2008
Acoustics and vibration - Laboratory measurement of vibro-acoustic
transfer properties of resilient elements -
Part 2: Direct method for determination of the dynamic stiffness of
resilient supports for translatory motion
(IDT)
|
|
Москва Стандартинформ 2011 |
Предисловие
Цели и принципы стандартизации в Российской Федерации установлены Федеральным законом от 27 декабря 2002 г. № 184-ФЗ «О техническом регулировании», а правила применения национальных стандартов Российской Федерации - ГОСТ Р 1.0-2004 «Стандартизация в Российской Федерации. Основные положения»
Сведения о стандарте
1 ПОДГОТОВЛЕН Автономной некоммерческой организацией «Научно-исследовательский центр контроля и диагностики технических систем» (АНО «НИЦ КД») на основе собственного аутентичного перевода стандарта, указанного в пункте 4
2 ВНЕСЕН Техническим комитетом по стандартизации ТК 183 «Вибрация и удар»
3 УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Приказом Федерального агентства по техническому регулированию и метрологии от 25 ноября 2010 г. № 534-ст
4 Настоящий стандарт является идентичным международному стандарту ИСО 10846-2:2008 «Вибрация и акустика. Лабораторные измерения виброакустических передаточных свойств упругих элементов. Часть 2. Прямой метод определения динамической жесткости упругих опор для поступательной вибрации» (ISO 10846-2:2008 «Acoustics and vibration - Laboratory measurement of vibro-acoustic transfer properties of resilient elements - Part 2: Direct method for determination of the dynamic stiffness of resilient supports for translatory motion». Наименование настоящего стандарта изменено относительно наименования указанного международного стандарта для приведения в соответствие с ГОСТ Р 1.5 (пункт 3.5).
При применении настоящего стандарта рекомендуется использовать вместо ссылочных международных стандартов соответствующие им национальные стандарты, сведения о которых приведены в дополнительном приложении ДА
5 ВВЕДЕН ВПЕРВЫЕ
Информация об изменениях к настоящему стандарту публикуется в ежегодно издаваемом указателе «Национальные стандарты», а текст изменений и поправок - в ежемесячно издаваемых информационных указателях «Национальные стандарты». В случае пересмотра (замены) или отмены настоящего стандарта соответствующее уведомление будет опубликовано в ежемесячно издаваемом информационном указателе «Национальные стандарты». Соответствующая информация, уведомление и тексты размещаются также в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет
СОДЕРЖАНИЕ
Введение
Пассивные виброизоляторы различных конструкций применяют для снижения уровня передаваемой вибрации. Примерами могут служить опоры автомобильных двигателей, упругие опоры зданий, устройства крепления и упругие муфты в соединениях валов судовых машин, виброизоляторы, устанавливаемые в предметах бытовой техники.
Настоящий стандарт устанавливает прямой метод определения переходной динамической жесткости линейных упругих опор. Он может быть применен и для опор с нелинейной зависимостью осадки опоры от статической нагрузки при условии, что при данной статической нагрузке поведение опоры в динамическом режиме линейно. Настоящий стандарт относится к серии стандартов на методы лабораторных измерений виброакустических свойств упругих элементов, который включает также основополагающий стандарт на общие принципы измерений, а также стандарты на косвенный метод и метод входной частотной характеристики. Руководство по выбору соответствующего метода установлено в ГОСТ Р ИСО 10846-1.
Для всех методов подразумевается, что лабораторные испытания проводят при предварительном нагружении объекта испытаний постоянной (статической) нагрузкой.
Измерения в соответствии с настоящим стандартом могут быть использованы для упругих опор, применяемых для гашения низкочастотной вибрации и предотвращения распространения вибрации по изолируемой конструкции в низкочастотной области звукового диапазона частот.
ГОСТ Р ИСО 10846-2-2010
НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
Вибрация
ИЗМЕРЕНИЯ ВИБРОАКУСТИЧЕСКИХ ПЕРЕДАТОЧНЫХ ХАРАКТЕРИСТИК
УПРУГИХ ЭЛЕМЕНТОВ КОНСТРУКЦИЙ В ЛАБОРАТОРНЫХ УСЛОВИЯХ
Часть 2
Прямой метод определения динамической жесткости упругих опор для поступательной вибрации
Vibration. Laboratory measurement of vibro-acoustic transfer
properties of resilient elements. Part 2. Direct method for
determination of the dynamic stiffness of resilient supports for translatory
motion
Дата введения - 2011-12-01
1 Область применения
Настоящий стандарт устанавливает метод определения переходной динамической жесткости для поступательной вибрации упругих опор под заданной статической нагрузкой. Данный метод, называемый прямым методом, основан на измерении вибрации на входной стороне упругой опоры и затормаживающей силы на его выходной стороне. Метод применим к упругим опорам с параллельными фланцевыми поверхностями (рисунок 1).

Примечание 1 - Если фланцевые поверхности упругой опоры непараллельны, то следует использовать дополнительные прокладки, которые будут рассматриваться как часть испытуемого объекта.
Примечание 2 - Стрелками показано направление приложения нагрузки.
Рисунок 1 - Примеры упругих опор с параллельными фланцевыми поверхностями
Настоящий стандарт распространяется на упругие опоры, которые предназначены для ослабления:
- вибрации в нижней части диапазона звуковых частот (обычно от 20 до 500 Гц), передаваемой от источника на конструкцию, в результате чего конструкция может излучать звук в воздушную, водную или другую среду;
- низкочастотной вибрации (обычно в диапазоне от 1 до 80 Гц), которая может, например, оказывать неблагоприятное воздействие на людей или, при значительной мощности вибрации, вызывать повреждение конструкций.
Примечание 1 - Применимость метода к упругим опорам как очень малых, так и очень больших размеров может быть ограничена размерами испытательной установки.
Примечание 2 - Метод применим также для испытаний распределенных опор в форме пластин или плит. Возможность использования данного метода для измерения характеристик конкретной опоры сложной формы определяет пользователь стандарта.
Настоящий стандарт распространяется на вибрацию в направлениях, перпендикулярном (нормальная составляющая) и параллельном (поперечная составляющая) к фланцевой поверхности опоры.
Установленный в настоящем стандарте метод применим в диапазоне частот от 1 Гц до частоты fUL, которая обычно зависит от особенностей испытательной установки.
Примечание 3 - Вследствие большого разнообразия испытательных установок и испытуемых упругих опор разброс значений fUL может быть велик. Настоящим стандартом не предусмотрена проверка пригодности испытательной установки для фиксированного диапазона частот испытаний. Вместо этого проверяют достоверность полученных результатов измерений согласно 6.1 - 6.4.
Результаты, полученные с помощью данного метода, могут быть использованы:
- изготовителями (поставщиками) упругих опор для указания их динамических характеристик в сопроводительной документации;
- в процессе разработки продукции;
- в системах управления качеством продукции;
- для вибрационных расчетов конструкций.
2 Нормативные ссылки
В настоящем стандарте использованы нормативные ссылки на следующие стандарты:
ИСО 266 Акустика. Предпочтительные ряды частот для акустических измерений (ISO 266, Acoustics - Preferred frequencies)
ИСО 2041 Вибрация, удар и контроль технического состояния. Словарь (ISO 2041, Mechanical vibration, shock and condition monitoring - Vocabulary)
ИСО 5348 Вибрация и удар. Механическое крепление акселерометров (ISO 5348, Mechanical vibration and shock - Mechanical mounting of accelerometers)
ИСО 10846-1 Вибрация и акустика. Лабораторные измерения виброакустических передаточных свойств упругих элементов. Часть 1. Общие принципы и руководство (ISO 10846-1, Acoustics and vibration - Laboratory measurement of vibro-acoustic transfer properties of resilient elements - Part 1: Principles and guidelines)
ИСО 16063-21 Методы калибровки датчиков вибрации и удара. Часть 21. Вибрационная калибровка сравнением с эталонным преобразователем (ISO 16063-21, Methods for the calibration of vibration and shock transducers - Part 21: Vibration calibration by comparison to a reference transducer)
Руководство ИСО/МЭК 98-3 Неопределенность измерений. Часть 3. Руководство по выражению неопределенности измерений [ISO/IEC Guide 98-3, Uncertainty of measurement - Part 3: Guide to the expression of uncertainty in measurement (GUM 1995)]
3 Термины и определения
В настоящем стандарте применены термины по ИСО 2041, а также следующие термины с соответствующими определениями:
3.1 виброизолятор (vibration isolator, resilient element): Устройство, предназначенное для ослабления передаваемой вибрации в некотором диапазоне частот.
Примечание - Данное определение изменено по сравнению с ИСО 2041 (словарная статья 2.120).
3.2 упругая опора (resilient support): Виброизолятор, назначение которого - поддерживать часть машины, здания или конструкции другого типа.
3.3 испытуемый объект (test element): Упругая опора, подвергающаяся испытаниям, вместе с фланцами и, при необходимости, вспомогательными приспособлениями.
3.4 затормаживающая сила (blocking force) Fb: Сила, приложенная к выходной стороне испытуемого объекта и обеспечивающая ее неподвижность.
3.5 переходная1) динамическая жесткость (переходная жесткость) (dynamic transfer stiffness) k2,1: Частотно-зависимое отношение комплексной затормаживающей силы F2,b к комплексному перемещению u1 на входной стороне виброизолятора, k2,1 = F2,b/u1.
____________
1) В отечественной научно-технической литературе при описании частотных характеристик объектов вместо слова «переходная» часто используют слово «передаточная».
Примечание 1 - Подстрочные индексы «1» и «2» обозначают входную и выходную стороны виброизолятора соответственно.
Примечание 2 - Значение k2,1 может зависеть от предварительного статического нагружения виброизолятора, его температуры и других условий.
Примечание 3 - На низких частотах k2,1 зависит в основном от упругих и диссипативных сил в виброизоляторе и k2,1 » k2,1. На высоких частотах, когда нельзя пренебречь влиянием сил инерции, k2,1 ≠ k2,1.
3.6 коэффициент потерь виброизолятора (коэффициент потерь) (loss factor of resilient element) h: Отношение мнимой и действительной частей k2,1 (т.е. тангенс фазового угла k2,1) в диапазоне низких частот, на которых влияние инерционных сил в виброизоляторе незначительно.
3.7 переходная жесткость, усредненная по частоте (frequency-averaged dynamic transfer stiffness) kav: Частотно-зависимое среднее значение переходной динамической жесткости в полосе частот Df.
Примечание - См. 8.2.
3.8 точечное соединение (point contact): Область контакта, которая совершает колебания как поверхность абсолютно жесткого тела.
3.9 нормальная составляющая поступательного движения (normal translation): Поступательная вибрация, действующая перпендикулярно к фланцевой поверхности виброизолятора.
3.10 поперечная составляющая поступательного движения (transverse translation): Поступательная вибрация, действующая перпендикулярно к нормальной составляющей поступательного движения.
3.11 линейность (linearity): Свойство поведения виброизолятора в динамическом режиме, при котором выполняется принцип суперпозиции.
Примечание 1 - Принцип суперпозиции может быть сформулирован следующим образом: если в двух отдельных экспериментах входному воздействию x1(t) будет соответствовать отклик на выходе y1(t), а входному воздействию x2(t) - отклик y2(t), то считают, что принцип суперпозиции выполнен, если входному воздействию ax1(t) + bx2(t) будет соответствовать отклик ay1(t) + by2(t). Данное условие должно выполняться для любых a, b, x1(t) и x2(t), где a и b - произвольные константы.
Примечание 2 - Прямая проверка выполнения принципа суперпозиции малопригодна с практической точки зрения, поэтому контроль линейности обычно осуществляют, проводя измерения переходной жесткости в некотором диапазоне входных воздействий. Если при заданном предварительном статическом нагружении виброизолятора измеренное значение динамической жесткости не зависит от амплитуды входного возбуждения, то систему можно рассматривать как линейную. По сути, эта процедура является контролем пропорциональности между возбуждением и откликом (см. 7.7).
3.12 прямой метод (direct method): Метод, в котором измерению подлежат перемещение, скорость или ускорение на входной стороне виброизолятора и сила (затормаживающая) на его выходной стороне.
3.13 косвенный метод (indirect method): Метод, в котором измерению подлежит передаточная функция виброизолятора по перемещению, скорости или ускорению при нагружении его выходной стороны известной массой.
Примечание - В общем случае косвенный метод допускает нагружение не только массой, но и любым другим известным импедансом.
3.14 метод входной частотной характеристики (driving point method): Метод, при котором измерению подлежат одна из частотно-зависимых величин, описывающих движение (перемещение, скорость или ускорение), а также частотно-зависимая сила на входной стороне виброизолятора, когда его выходная сторона заторможена.
3.15 уровень силы (force level) LF: Величина, выражаемая в децибелах (дБ) и определяемая по формуле
![]()
где F2 - средний квадрат силы в заданной полосе частот;
F0 - опорное значение силы, равное 10-6 Н1).
_____________
1) В отечественной технической литературе часто применяют другие опорные значения силы и жесткости: 20 × 10-6 Н и 8 кН × м-1 соответственно, поэтому при рассмотрении данных о динамической жесткости, представленных в виде относительных, а не абсолютных величин, всегда необходимо учитывать, какие опорные значения были использованы.
3.16 уровень ускорения (acceleration level) La: Величина, выражаемая в децибелах (дБ) и определяемая по формуле
![]()
где а2 - средний квадрат ускорения в заданной полосе частот;
а0 - опорное значение ускорения, равное 10-6 м/с2.
3.17 уровень переходной жесткости (level
of dynamic transfer stiffness) ![]() : Величина,
выражаемая в децибелах (дБ) и определяемая по формуле
: Величина,
выражаемая в децибелах (дБ) и определяемая по формуле

где ![]() - средний квадрат
переходной динамической жесткости (см. 3.5)
в заданной полосе частот;
- средний квадрат
переходной динамической жесткости (см. 3.5)
в заданной полосе частот;
k0 - опорное значение жесткости, равное 1 Н × м-1.
3.18 уровень переходной жесткости, усредненной по частоте (level of frequency band averaged dynamic transfer stiffness) ![]() : Величина,
выражаемая в децибелах (дБ) и определяемая по формуле
: Величина,
выражаемая в децибелах (дБ) и определяемая по формуле
где kav - переходная жесткость, усредненная по частоте (см. 3.7);
k0 - опорное значение жесткости, равное 1 Н × м-1.
3.19 вибрация, передаваемая побочным путем (flanking transmission): Силы и ускорения на выходной стороне виброизолятора, вызванные вибрационным возбуждением на его входной стороне, но переданные не через виброизолятор, а другим путем.
3.20 верхняя граница диапазона частот применения метода (верхняя граница диапазона частот) fUL: Частота, зависящая от примененного метода определения частотной характеристики, в пределах до которой полученные значения k2,1 можно считать достоверными.
4 Теоретические основы метода
Принципы прямого метода определения динамической переходной жесткости описаны в ИСО 10846-1. Отличительной особенностью данного метода является измерение затормаживающей силы, действующей со стороны фундамента испытательной установки. Назначение фундамента состоит в необходимом ослаблении вибрации на выходной стороне испытуемого объекта по сравнению с вибрацией на его входной стороне.
5 Требования к измерительному и испытательному оборудованию
5.1 Нормальная составляющая поступательного движения
5.1.1 Общие положения
На рисунке 2 приведена схема возможного конструктивного решения установки для испытаний упругих опор при поступательной вибрации в направлении, соответствующем обычному приложению нагрузки. Испытуемые объекты закрепляют на установке способом, соответствующим условиям их эксплуатации.
Примечание - Схема, приведенная на рисунке 2, не исчерпывает все возможные конструктивные исполнения испытательных установок и не исключает иные конструктивные решения.
Для реализации метода, установленного в настоящем стандарте, испытательная установка должна включать в себя элементы, описанные в 5.1.2 - 5.1.7.
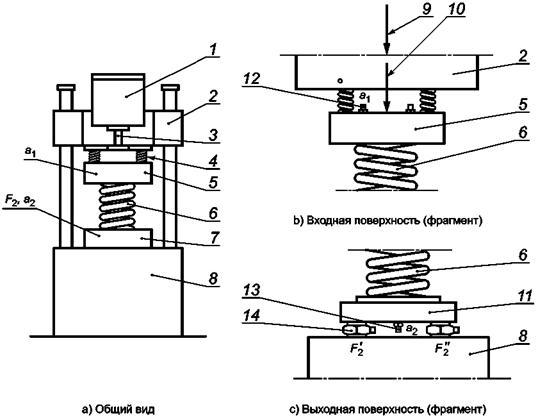
1 - вибровозбудитель; 2 - траверса; 3 - толкатель; 4
- вспомогательные виброизоляторы;
5 - плита распределения вынуждающей силы; 6 - испытуемый объект;
7 - система измерения силы F2 и ускорения а2; 8 - жесткий фундамент; 9 - статическая
нагрузка;
10 - динамическое возбуждение; 11 - плита распределения силы на
выходной стороне;
12 - акселерометр (измерение а1); 13 -
акселерометр (измерение a2); 14 - датчики силы (F2 = F¢2 +F²2)
Рисунок 2 - Лабораторная испытательная установка для определения
переходной динамической жесткости
для нормальной составляющей поступательного движения
Испытательная установка должна опираться на массивный жесткий фундамент, используемый системой измерения силы [см. 5.1.4 и рисунок 2с)]
5.1.3 Устройство предварительного статического нагружения
После установки испытуемый объект должен испытывать воздействие представительной и заданной статической нагрузки, которую можно создать, например, одним из следующих способов:
а) использованием вибровозбудителя гидравлического типа, который способен создавать помимо динамической также статическую нагрузку на испытуемый объект. Вибровозбудитель вместе с испытуемым объектом устанавливают внутри рамной конструкции;
b) использованием рамной конструкции только для создания статической нагрузки [см. рисунок 2а)]. В этом случае необходимо установить дополнительные виброизоляторы с входной стороны испытуемого объекта для его развязки с рамной конструкцией;
c) использованием для создания статической нагрузки силы тяжести нагружающей массы, которую помещают на верхнем фланце испытуемого объекта.
Система измерения силы на выходной стороне испытуемого объекта включает в себя один или несколько датчиков силы [см. рисунок 2с)].
Примечание - Часто между датчиком силы и испытуемым объектом устанавливают вспомогательную плиту, назначением которой помимо распределения нагрузки на испытуемый объект является также создание высокого входного механического импеданса нагрузки на датчик силы. Кроме того, вспомогательная плита обеспечивает условие одинаковой вибрации по всей поверхности фланца на выходной стороне испытуемого объекта.
5.1.5 Устройства измерения ускорения
Акселерометры устанавливают на входной и выходной сторонах испытуемого объекта и на фундаменте испытательной установки [см. рисунки 2b) и 2с)]. Если невозможно установить акселерометры в центре поверхностей, а также для повышения точности измерений рекомендуется устанавливать по два или (предпочтительно) четыре акселерометра симметрично центрам этих поверхностей. Сигнал ускорения получают усреднением сигналов акселерометров.
Вместо акселерометров допускается использовать датчики перемещения или скорости при условии выполнения требований к диапазону частот измерений.
5.1.6 Система возбуждения вибрации
Система возбуждения вибрации должна обеспечивать динамическое воздействие на испытуемый объект достаточной мощности в заданном диапазоне частот. Это может быть достигнуто с помощью вибровозбудителей разных типов, например:
a) вибровозбудителя гидравлического типа, способного, кроме этого, создавать постоянную статическую нагрузку;
b) одного или нескольких вибровозбудителей электродинамического типа с толкателями;
c) одного или нескольких вибровозбудителей пьезоэлектрического типа.
Для динамической развязки вибровозбудителей и предотвращения передачи вибрации побочными путями через раму испытательной установки, создающей постоянную статическую нагрузку, может потребоваться применение вспомогательных виброизоляторов. Однако для установок с вибровозбудителем гидравлического типа, создающего одновременно как статическую, так и динамическую нагрузки такие развязки обычно нежелательны, поскольку они вносят искажения в результаты измерений на низких частотах.
5.1.7 Плита распределения вынуждающей силы
Плита распределения вынуждающей силы, устанавливаемая на входной поверхности испытуемого объекта, предназначена для:
a) обеспечения равномерного распределения вибрационного возбуждения по поверхности фланца;
b) облегчения создания однонаправленного возбуждения.
Плиту распределения вынуждающей силы не применяют, если испытуемый объект включает в себя жесткий входной фланец, обеспечивающий выполнение вышеуказанных функций.
5.2 Поперечная составляющая поступательного движения
5.2.1 Общие положения
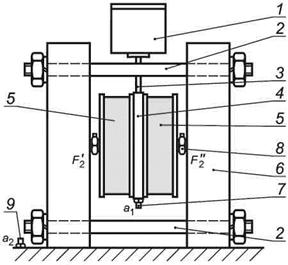
На рисунках 3 - 5 приведены схемы возможных конструктивных решений установок для испытаний упругих опор, подвергаемых воздействию поступательной вибрации в направлении, поперечном нормальной составляющей динамической нагрузки. В установке, изображенной на рисунке 3, для подавления вибрации в нежелательных направлениях на входной [рисунок 3а)] и выходной [рисунок 3с)] сторонах испытуемого объекта используют роликовые опоры. Рекомендации по правильному использованию таких опор даны в 5.2.7 и 6.1. В установках, изображенных на рисунках 4 и 5, для подавления вибрации в нежелательных направлениях применена дифференциальная схема с двумя номинально идентичными испытуемыми объектами.
Примечание - Схемы, приведенные на рисунках 3 - 5, не исчерпывают все возможные конструктивные исполнения испытательных установок и не исключают иные конструктивные решения.
Для реализации метода, установленного в настоящем стандарте, испытательная установка должна включать в себя элементы, описанные в 5.2.2 - 5.2.7.
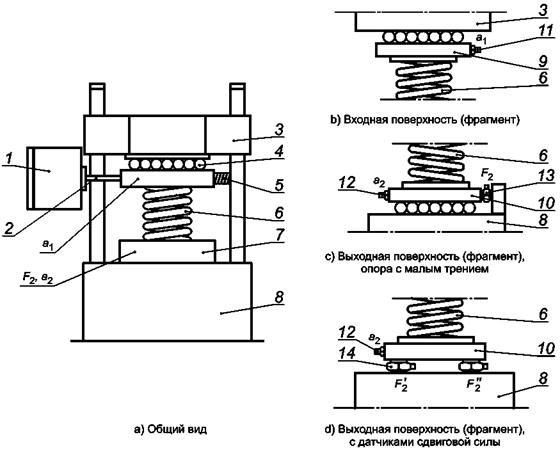
1 - вибровозбудитель; 2 - толкатель; 3 - траверса; 4
- опора с малым трением; 5 - вспомогательные
пружины для гашения нежелательной вибрации; 6 - испытуемый объект; 7
- система измерения силы F2
и ускорения а2; 8 - жесткий фундамент; 9 -
плита распределения вынуждающей силы;
10 - плита распределения силы на выходной стороне; 11 -
акселерометр (измерение а1);
12 - акселерометр (измерение а2); 13 - датчик
силы; 14 - датчики сдвиговой силы (F2 = F¢2 + F"2)
Рисунок 3 - Лабораторная испытательная установка для определения
переходной динамической жесткости
для поперечной составляющей поступательного движения (пример 1)
Испытуемый объект должен быть установлен на массивный жесткий фундамент (см. рисунки 3 и 4) или между двумя жесткими вертикальными стойками (см. рисунок 5), на которые помещают систему измерения силы.
5.2.3 Устройство предварительного статического нагружения
После установки испытуемый объект должен испытывать воздействие представительной и заданной статической нагрузки. Примеры создания нагрузки показаны на рисунках 3 - 5.
5.2.4 Система измерения силы
Система измерения силы на выходной стороне испытуемого объекта включает в себя один или несколько датчиков силы. Существует два основных варианта измерения силы:
a) с использованием одного или нескольких датчиков сдвиговой силы [см. рисунки 3d), 4 и 5]. Это может потребовать установки вспомогательной плиты между испытуемым виброизолятором и датчиками силы (см. примечание к 5.1.4);
b) с использованием датчиков силы для нормальной нагрузки [см. рисунок 3с)]. Это также может потребовать установки вспомогательной плиты между испытуемым виброизолятором и датчиками силы (см. примечание к 5.1.4).
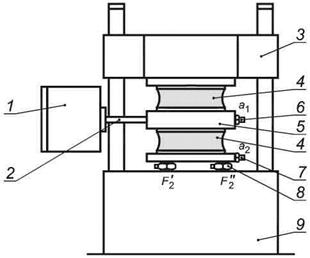
1 - вибровозбудитель; 2 - толкатель; 3 - траверса; 4
- номинально идентичные упругие опоры (нижняя
опора рассматривается как испытуемый объект); 5 - плита распределения
вынуждающей силы;
6 - акселерометр (измерение а1); 7 -
акселерометр (измерение а2);
8 - датчики сдвиговой силы (F2 = F¢2 + F²2); 9 - жесткий
фундамент
Рисунок 4 - Лабораторная испытательная установка для определения
переходной динамической жесткости
для поперечной составляющей поступательного движения (пример 2)
1 - вибровозбудитель; 2 - устройство предварительного
статического нагружения; 3 - толкатель;
4 - плита распределения вынуждающей силы; 5 - номинально идентичные упругие опоры
(результатом
измерений будет усредненная переходная жесткость для двух номинально идентичных
опор); 6 - жесткие
вертикальные стойки; 7 - акселерометр (измерение а1); 8 - датчики сдвиговой
силы [F2 = (F¢2 + F2")/2];
9 - акселерометр (измерение а2)
Рисунок 5 - Лабораторная испытательная установка для определения
переходной динамической жесткости
для поперечной составляющей поступательного движения (пример 3)
5.2.5 Устройства измерения ускорения
Акселерометры устанавливают на входной и выходной сторонах испытуемого объекта.
Акселерометры рекомендуется устанавливать на фланцах испытуемого объекта или на плитах распределения силы так, чтобы их ось совпадала с горизонтальной осью симметрии фланца или плиты в направлении воспроизводимых поперечных колебаний. Если эти точки недоступны для установки акселерометров, а также для повышения точности измерений на каждой из поверхностей могут быть установлены симметрично относительно указанных точек по два или (предпочтительно) четыре акселерометра, сигналы которых усредняют.
Вместо акселерометров допускается использовать датчики перемещения или скорости при условии выполнения требований к диапазону частот измерений.
5.2.6 Система возбуждения вибрации
Система возбуждения вибрации должна обеспечивать динамическое воздействие на испытуемый объект достаточной мощности в заданном направлении1) в заданном диапазоне частот. Примеры вибровозбудителей, позволяющих реализовать данное требование, приведены в 5.1.6.
_____________
1) В схемах с одной испытуемой упругой опорой (рисунки 5, 7) трудно обеспечить точное выполнение требования возбуждать колебания строго в направлении поперечной составляющей (см. примечание к 5.2.7). Поэтому предпочтительно использовать схемы с двумя номинально идентичными упругими опорами (рисунки 4, 5) или применять несколько вибровозбудителей для подавления нежелательной вибрации.
5.2.7 Плита распределения вынуждающей силы
Плита распределения вынуждающей силы предназначена для выполнения следующих функций:
a) обеспечения равномерного распределения вибрационного возбуждения по поверхности фланца;
b) облегчения создания однонаправленного возбуждения.
Плиту распределения вынуждающей силы не применяют, если испытуемый объект включает в себя жесткий входной фланец, обеспечивающий выполнение вышеуказанных функций.
Возбуждение преимущественно однонаправленного поступательного движения входной стороны испытуемого объекта является важным требованием при определении переходной динамической жесткости в соответствии с настоящим стандартом (см. 6.4). При возбуждении поперечной составляющей выполнению данного условия могут способствовать:
a) симметричность направления возбуждения и граничных условий плиты распределения вынуждающей силы (см. рисунки 4 и 5);
b) инерционные свойства плиты распределения вынуждающей силы.
В некоторых случаях для предотвращения движения в нежелательном направлении необходимо применять дополнительные связи (направляющие движения) - см. рисунки 3а) и 3b).
Примечание - При использовании между входной стороной испытуемого объекта и рамой установки роликовых опор [как показано на рисунках 3а) и 3b)] последние должны обладать механическими свойствами, соответствующими приложенной статической нагрузке. С одной стороны, упругие деформации таких опор приведут к появлению нежелательных сил в направлении, поперечном направлению возбуждения. С другой стороны, слишком жесткие опоры создадут условия для передачи вибрации по побочному пути через рамную конструкцию испытательной установки, что может привести к существенному сужению диапазона частот измерений.
5.3 Подавление нежелательной вибрации
5.3.1 Общие положения
Метод определения переходной динамической жесткости, установленный в настоящем стандарте, предполагает приложение однонаправленного возбуждения поочередно в направлениях нормальной и поперечной составляющих.
Однако несимметричность возбуждения граничных условий или свойств испытуемого объекта может вызвать появление нежелательных составляющих вибрации, искажающих результаты измерений на определенных частотах. Способы уменьшения этого эффекта рассмотрены в 5.3.2 и 5.3.3. К отдельной категории испытательных установок, специально спроектированных с условием подавления нежелательной вибрации, относятся установки с симметричной конфигурацией, предусматривающей размещение двух идентичных упругих опор, имеющих одинаковую номинальную жесткость (см. рисунки 4 и 5). Количественные требования к ограничению нежелательной вибрации приведены в 6.4.
5.3.2 Нормальная составляющая поступательного движения
При возбуждении вибрации в направлении нормальной составляющей основным способом, позволяющим избежать появления вибрации в нежелательных направлениях, является симметричное расположение вибровозбудителя или пары вибровозбудителей.
Однако появлению вибрации в нежелательных направлениях могут способствовать особенности испытуемого объекта. Подавление вибрации в нежелательных направлениях возможно путем применения испытательной установки симметричной конфигурации, в которой размещают две или четыре номинально идентичных упругих опоры, или направляющей системы (например, в виде роликов), по которой движется плита распределения вынуждающей силы. Схемы таких установок в настоящем стандарте не рассматриваются.
5.3.3 Поперечная составляющая поступательного движения
При возбуждении вибрации в поперечном направлении неизбежно наблюдается связь этой вибрации с угловой вибрацией входной стороны испытуемого объекта.
Существует ряд способов, позволяющих снизить вибрацию в нежелательных направлениях, примеры которых приведены на рисунках 3 - 5. На рисунке 3 изображена испытательная установка с направляющей системой, позволяющей уменьшить угловую вибрацию на входной стороне испытуемого объекта. На рисунках 4 и 5 показаны испытательные установки симметричной конфигурации с двумя номинально идентичными испытуемыми объектами.
В примере, показанном на рисунке 4, испытуемым объектом является нижняя упругая опора.
В примере, показанном на рисунке 5, определяют среднюю для двух номинально идентичных упругих опор переходную динамическую жесткость, измеряя среднее значение затормаживающей силы Fb = (F¢b + F²b)/2. Точность метода зависит от того, насколько в действительности идентичными являются эти опоры. Проверку идентичности должен выполнять пользователь настоящего стандарта.
Альтернативой упомянутым методам может служить использование нескольких вибровозбудителей в сочетании с набором акселерометров для измерения поступательной и угловой вибрации в разных направлениях и системой управления испытаниями, что позволит создать однонаправленное возбуждение с требуемой точностью (см. [6]).
6 Критерии соответствия испытательной установки требованиям испытаний
Каждая испытательная установка характеризуется диапазоном частот, результаты измерений в котором можно считать достоверными. Одно из ограничений применения испытательной установки связано с рабочим диапазоном частот применяемого вибровозбудителя. Другое ограничение связано с требованиями измерения затормаживающей силы. На рисунках 2, 3 и 4 указаны следующие измеряемые величины:
- F2 - сила на выходной стороне испытуемого объекта;
- а1 - ускорение на входной стороне испытуемого объекта (на плите распределения вынуждающей силы);
- а2 - ускорение на выходной стороне испытуемого объекта (на плите распределения затормаживающей силы).
Результаты определения переходной динамической жесткости в соответствии с настоящим стандартом считают достоверными только в случае выполнения условия
Примечание - Невыполнение условия (1) может быть объяснено недостаточной жесткостью фундамента (в сравнении с жесткостью упругой опоры) или значительной вибрацией, передаваемой побочным путем через траверсу и вертикальные стойки, а, может быть, через воздух, на выходную сторону испытуемого объекта. Влияние побочного пути распространения вибрации может быть существенно снижено применением вспомогательных виброизоляторов, обеспечивающих динамическую развязку верхней части испытуемого объекта с рамной конструкцией (см. рисунок 2), а также рамной конструкции и вибровозбудителя. Кроме того, следует принимать во внимание возможное влияние роликовых опор на входной стороне испытуемого объекта (см. примечание к 5.2.7).
6.2 Измерения затормаживающей силы
Масса m2, расположенная между испытуемым объектом и датчиком силы на выходной стороне упругой опоры, вызывает появление систематической погрешности при измерении затормаживающей силы. Разность между оцениваемой затормаживающей силой F¢b и результатом измерений силы F2 будет равна т2а2 (см. рисунок 6).
Для массы m2, которую можно оценить как сумму массы плиты распределения затормаживающей силы и половины массы датчика силы, должно быть выполнено условие

1 - испытуемый объект; 2 - плита распределения затормаживающей силы; 3 - жесткий фундамент
Рисунок 6 - Силы и ускорение на выходной стороне испытуемой упругой опоры
Примечание 1 - Неравенство (2) эквивалентно условию ![]() .
.
Примечание 2 - Если неравенство (2) не выполняется, то следует либо уменьшить т2, либо увеличить жесткость датчика силы. Последнее условие можно выполнить, если использовать вместо одного датчика несколько датчиков или датчик больших размеров.
Примечание 3 - Если, как в примере на рисунке 3с), на выходной стороне испытуемого виброизолятора находятся роликовые опоры, то свойства этих опор должны соответствовать приложенной статической нагрузке. Упругая деформация роликовых опор приведет к появлению поперечной составляющей затормаживающей силы и искажению результатов измерений.
6.3 Вибрация, передаваемая побочным путем
Для многих реальных установок точность метода ограничивается из-за передачи вибрации по побочному пути - по воздуху или по конструкции испытательной установки. При наличии большого разнообразия применяемых установок невозможно указать единый метод контроля путей распространения вибрации. Поэтому метод контроля должен быть установлен пользователем настоящего стандарта. Выполнение условия (2) является достаточной гарантией достоверности результатов испытаний даже при наличии вибрации, передаваемой побочным путем.
6.4 Нежелательные составляющие входной вибрации
Входная вибрация в направлениях, отличающихся от направления прилагаемого возбуждения, должна быть подавлена согласно 5.3.
Результаты измерений, проведенных в соответствии с требованиями настоящего стандарта, считают достоверными только в том случае, если уровень входного ускорения La в направлении возбуждения превышает уровень ускорения La¢ в любом направлении возбуждения, перпендикулярном к заданному, не менее чем на 15 дБ, т.е.
La - La¢ ³ 15 дБ. (3)
Точки измерений, в которых должно выполняться указанное требование, показаны на рисунке 7.
При возбуждении нормальной составляющей поступательного движения входной вибрацией a1z является вибрация в направлении возбуждения в месте контакта массы распределения возбуждения и входной стороны испытуемого объекта. Нежелательные составляющие a¢1x и a¢1y следует измерять на краю плиты распределения вынуждающей силы в плоскости контакта плиты и входного фланца испытуемого объекта.
При возбуждении поперечной составляющей поступательного движения в направлении х или у входную вибрацию а1х или а1y измеряют вдоль горизонтальной оси симметрии плиты распределения вынуждающей силы. Нежелательные составляющие вибрации a¢1z и a¢1y или a¢1z и a¢1x измеряют на краю плиты распределения вынуждающей силы в плоскости контакта плиты и входного фланца испытуемого объекта.
Если при наличии массивного входного фланца у испытуемого объекта плиту распределения вынуждающей силы не используют (см. 5.2.7), то должна быть определена схема расположения датчиков, аналогичная показанной на рисунке 7, для контроля подавления нежелательных составляющих вибрации в соответствии с неравенством (3).
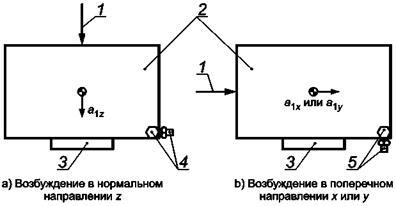
1 - вибровозбудитель; 2 - плита распределения вынуждающей
силы; 3 - входной фланец испытуемого
объекта; 4 - нежелательная вибрация а¢1x и a¢1y; 5 -
нежелательная вибрация а¢1z и a¢1y или а¢1x
Рисунок 7 - Точки измерений для контроля нежелательных составляющих вибрации
Акселерометры должны быть калиброваны при комнатной температуре в диапазоне частот измерений и иметь во всем диапазоне частот постоянный коэффициент преобразования в пределах 0,5 дБ. Калибровку проводят по ИСO 16063-21.
Акселерометры должны обладать низкой чувствительностью к изменению условий окружающей среды, таких как температура, относительная влажность, магнитные поля. Коэффициент преобразования в поперечном направлении должен быть менее 5 %.
Если вместо акселерометров используют датчики скорости или перемещения, то они должны удовлетворять тем же требованиям.
6.6 Датчики силы
Датчики силы должны быть калиброваны при комнатной температуре в диапазоне частот измерений и иметь в этом диапазоне постоянный коэффициент преобразования в пределах допуска 0,5 дБ. Калибровку проводят методом нагрузки массой, установленным в ИСО 7626-1.
Указанное требование к постоянству коэффициента преобразования должно выполняться и при наличии устройства его коррекции.
Датчики силы должны обладать низкой чувствительностью к изменению условий окружающей среды, таких как температура, относительная влажность, магнитные поля, механическая деформация основания. Коэффициент преобразования в поперечном направлении должен быть менее 5 %.
При необходимости суммирования сигналов датчиков силы или акселерометров результат суммирования не должен выходить за пределы допуска ± 5 %. Одним из способов выполнения данного требования является применение датчиков одного типа с коэффициентами преобразования, отличающимися друг от друга не более чем на 5 %. Другой способ - выполнять суммирование с помощью многоканального анализатора. В этом случае для компенсации разности коэффициентов преобразований датчиков более 5 % и разности коэффициентов усиления по каждому каналу должны быть введены соответствующие поправки (см. 6.8).
Используемые анализаторы сигналов в узкой полосе частот должны соответствовать следующим требованиям:
a) разрешение по частоте должно обеспечивать получение в спектре сигнала, по крайней мере, пяти спектральных линий в каждой третьоктавной полосе частот анализа;
b) разность частотных характеристик каналов (включая устройства формирования сигналов), используемых для измерений ускорения на входной стороне и силы на выходной стороне упругой опоры, должна быть не более 0,5 дБ для измерений с тем же разрешением по частоте, которое используется при испытании упругих опор. В противном случае для компенсации разницы в коэффициентах усиления каналов должны быть введены соответствующие поправки.
Один из способов сравнения коэффициентов усиления каналов заключается в следующем. На вход обоих каналов подают один и тот же широкополосный сигнал (например, белый шум). После этого определяют отношение среднеквадратичных значений сигналов в узкой полосе частот, которое должно быть не более 0,5 дБ. Если это условие не выполняется, то полученное отношение используют как корректирующий множитель при измерениях динамической жесткости.
7 Испытания
7.1 Установка испытуемого объекта
Испытуемый объект соединяют с плитой распределения вынуждающей силы и плитой распределения затормаживающей силы (при их наличии) так, чтобы обеспечить надежный контакт с поверхностями этих плит по всей площади фланцев. Детали, которые не являются составной частью упругой опоры в процессе ее эксплуатации, должны быть демонтированы.
Примечание - Для улучшения контактов испытуемого объекта с элементами испытательной установки могут применяться консистентная смазка или двусторонняя клейкая лента. Однако в последнем случае это может привести к искажению результатов в области высоких частот. При больших размерах поверхности фланцев ее рекомендуется выровнять.
При испытании упругих опор, содержащих резиновые детали, может наблюдаться медленное проседание последних под действием статической нагрузки. В этом случае к опоре должна быть приложена статическая нагрузка до 100 % ее допустимого значения. Измерения можно проводить только после того, как изменение проседания опоры под действием нагрузки будет не более 10 % в день.
7.2 Выбор системы измерения силы
В системе измерения силы применяют один или несколько датчиков силы в зависимости от размеров испытуемого объекта и степени его симметричности.
Плита распределения затормаживающей силы должна быть как можно меньших размеров и массы, но обладать достаточной жесткостью, чтобы не допустить появление резонансов в диапазоне частот измерений. Размеры поверхности плиты не должны быть меньше соответствующих размеров испытуемого объекта в области контакта.
Для проверки жесткости системы измерения силы ее возбуждают силой, приложенной в центре плиты распределения вынуждающей силы. Определяют передаточную функцию системы, входом которой является сигнал возбуждения (его измеряют с помощью дополнительного датчика силы), а выходом - сигнал системы измерения силы. Передаточная функция должна иметь постоянное значение во всем диапазоне частот измерений.
Акселерометры устанавливают на входной и выходной сторонах испытуемого объекта для измерения ускорений а1 и а2 соответственно (см. рисунки 2 - 5). Крепление акселерометров должно быть жестким и соответствовать рекомендациям ИСО 5348.
Следует обратить особое внимание на места установки акселерометров на плитах распределения силы или фланцах испытуемого объекта. Если вибрация действует преимущественно в вертикальном или поперечном направлении, то допускается проводить измерения с использованием одного акселерометра, установленного на некотором расстоянии от оси симметрии испытуемого объекта при условии, что угловая вибрация не приведет к отклонению результата измерений более чем на 0,5 дБ.
Примечание - Для контроля угловой вибрации можно провести измерения с помощью одного и того же акселерометра, устанавливаемого на разных расстояниях от оси симметрии.
Для исключения влияния угловой вибрации фланцев испытуемого объекта измерения вибрации проводят с помощью двух акселерометров, устанавливаемых симметрично относительно вертикальной оси симметрии испытуемого объекта, с последующим усреднением.
7.4 Установка вибровозбудителя
Для передачи возбуждения от вибровозбудителя к входной стороне испытуемого объекта может потребоваться применение толкателя (см. [3]). Конструкция толкателя должна быть достаточно жесткой, не допускающей появления изгибных колебаний, которые могут снизить точность измерений вследствие появления вибрации в поперечном направлении и излучения звуковой энергии в воздушную среду.
Генератор сигналов должен производить сигналы одного из следующих видов:
- синусоидальные сигналы с дискретно изменяющимися частотами;
- синусоидальные сигналы с плавной перестройкой по частоте;
- синусоидальные сигналы с периодической перестройкой по частоте;
- узкополосные случайные сигналы.
Производимый сигнал должен быть достаточно длительным для того, чтобы обеспечить его эффективное усреднение. Изменение результата измерений после удвоения времени усреднения должно быть не более 0,1 дБ. При использовании сигналов с дискретным изменением или периодической перестройкой частоты шаг изменения частоты или расстояние между соседними составляющими в спектре сигнала должны быть такими, чтобы при анализе в каждой третьоктавной полосе диапазона частот измерений было не менее пяти частотных составляющих.
7.6 Измерения
Измерения проводят для одного или нескольких представительных режимов статического нагружения.
Измерения проводят при одном или нескольких представительных значений температуры окружающего воздуха. В процессе измерений заданное значение температуры контролируют. До проведения испытаний с заданной температурой окружающего воздуха испытуемый объект выдерживают при этой температуре (в пределах допуска ± 3 °С) в течение не менее 24 ч.
Если ожидается высокая чувствительность свойств материала испытуемого объекта (например, демпфирования) к изменению температуры или относительной влажности воздуха, то на эти параметры устанавливают допуски, и результаты измерений считают достоверными только в пределах установленных допусков.
Перед проведением измерений определяют и фиксируют уровни силы ![]() и ускорения
и ускорения
![]() в
присутствии сигнала возбуждения и без него (фон). По возможности, и если не
установлено иное, сигнал возбуждения регулируют таким образом, чтобы разность
уровней в присутствии возбуждения и без него была не менее 15 дБ во всех
диапазонах частот измерений.
в
присутствии сигнала возбуждения и без него (фон). По возможности, и если не
установлено иное, сигнал возбуждения регулируют таким образом, чтобы разность
уровней в присутствии возбуждения и без него была не менее 15 дБ во всех
диапазонах частот измерений.
Перед проведением измерений определяют, насколько ускорение в направлении возбуждения превосходит ускорение в других направлениях. Результаты измерений, при которых не выполнено условие формулы (3), не учитывают при расчете переходной динамической жесткости.
Кроме того, если для измерения ускорений на входной (а1) и выходной (а2) сторонах испытуемого объекта будет использовано по одному акселерометру, то проверяют пригодность места установки акселерометра по 7.3.
При испытаниях проводят измерения ускорений а1х, а1у и a1z на входной стороне испытуемого объекта и силы F2 и ускорений а2х, а2у и a2z на выходной стороне испытуемого объекта. Направление z соответствует нормальной составляющей поступательного движения, направления у и х - его поперечным составляющим. При расчете переходной динамической жесткости не учитывают результаты измерений, не соответствующие требованиям 6.1 - 6.4.
7.6.2 Достоверность результатов измерений
Результаты измерений считают достоверными при выполнении следующих условий:
a) поведение испытуемого объекта в диапазоне возбуждения остается приблизительно линейным (см. 7.7);
b) область контакта упругой опоры с источником вибрации и с изолируемой конструкцией можно считать точечным соединением.
Примечание - Для проверки вышеперечисленных условий полезно использовать функцию когерентности между сигналами на входной и выходной стороне испытуемого объекта. Значительное отличие функции когерентности от единицы свидетельствует о наличии каких-либо нарушений условия достоверности результатов измерений: низком отношении сигнал/шум, нелинейности и др.
7.6.3 Неопределенность измерений
Неопределенность результатов измерений, проведенных в соответствии с настоящим стандартом, необходимо оценить согласно Руководству ИСО/МЭК 98-3. В протоколе испытаний указывают расширенную неопределенность и значение коэффициента охвата, который должен соответствовать доверительной вероятности 95 %.
Рекомендации по оценке неопределенности измерений приведены в приложении В.
Примечание - Практическое применение Руководства ИСО/МЭК 98-3 в полном объеме в настоящее время затруднительно за исключением небольшого числа специализированных испытательных лабораторий. Накопленных сведений о воспроизводимости результатов, полученных в соответствии с настоящим стандартом, недостаточно для определения точности метода. Систематическое исследование источников неопределенности, перечисленных в приложении В, позволяет получить важную информацию для описания метода измерений.
Концепция определения переходной динамической жесткости виброизоляторов основана на предположении линейности моделей, описывающих их движение. В реальных условиях уравнение движения упругих опор можно считать линейным только в некотором приближении. Чтобы убедиться в выполнении требования линейности, следует сравнить результаты измерений переходной динамической жесткости, полученные при разных уровнях входного возбуждения.
На практике проверка линейности в полном объеме труднореализуема, поэтому в настоящем стандарте проверка линейности ограничена контролем пропорциональности входных и выходных сигналов, т.е. постоянством отношения силы на выходной стороне испытуемого объекта к ускорению (перемещению, скорости) на его входной стороне (см. 3.11, примечания 1 и 2).
Значения переходной динамической жесткости, определенные по настоящему стандарту, можно считать достоверными только для диапазона возбуждений, который рассматривался при проверке линейности и для которого линейность была подтверждена. Верхнюю границу диапазона возбуждения, для которого данные можно считать достоверными, указывают в протоколе испытаний.
Проверку линейности проводят следующим образом:
a) принимают за спектр А третьоктавный спектр входного сигнала заданного уровня;
b) принимают за спектр В третьоктавный спектр сигнала, уровень которого на 10 дБ ниже, чем для спектра А;
c) если уровни переходной динамической жесткости для возбуждений со спектрами А и В отличаются не более чем на 1,5 дБ, то считают, что результаты измерений для уровня входного воздействия равного или ниже, чем в спектре А, являются достоверными;
d) если максимальный уровень спектра А, который может быть достигнут на данной испытательной установке, ниже уровней входных воздействий, которые имеют место при эксплуатации упругой опоры, то эта установка должна быть модифицирована для того, чтобы получить требуемые уровни входного возбуждения. В противном случае используют другую испытательную установку;
e) если проверка по перечислению с) привела к отрицательным результатам, то вышеуказанную процедуру следует повторять для более низких уровней входных воздействий до тех пор, пока не будет установлен диапазон, в котором сохраняется постоянный коэффициент пропорциональности между входным и выходным сигналами.
Диапазон линейности должен быть зафиксирован как максимальное значение уровня входного ускорения в третьоктавной полосе частот, для которого проверка линейности дала положительный результат.
Примечание - На основе полученных предельных значений входного воздействия в третьоктавных полосах могут быть дополнительно рассчитаны и представлены другие предельные параметры, например максимально допустимое среднеквадратичное значение входного перемещения.
Если проверка линейности для данного испытуемого объекта с использованием вышеуказанного критерия дала отрицательный результат, то поведение этого объекта следует рассматривать как нелинейное. На такие объекты метод определения переходной динамической жесткости, установленный в настоящем стандарте, не распространяется. Но он может быть использован при оценивании свойств упругой опоры для конкретных условий ее применения, например при синусоидальном возбуждении с фиксированной амплитудой.
8 Оценка результатов испытаний
8.1 Расчет переходной динамической жесткости
После получения результатов измерений затормаживающей силы F2 и ускорения а1 рассчитывают переходную динамическую жесткость, для чего предварительно выполняют преобразование ускорения а1 в перемещение u1. В случае гармонических сигналов переходную динамическую жесткость k2,1 рассчитывают по формуле
![]() (4)
(4)
Переходная динамическая жесткость представляет собой комплексную
функцию частоты с модулем ![]() и фазовым углом j2,1.
и фазовым углом j2,1.
На основании измерений переходной динамической жесткости k2,1 (для тех же ограничений и требований по точности измерений) определяют коэффициент потерь h (см. 3.6) по формуле
h = tgj2,1 = Im{k2,1}/Re{k2,1}. (5)
Примечание 1 - Расчеты коэффициента потерь h выполняют при необходимости. На высоких частотах упругую опору нельзя рассматривать как безмассовую пружину, поэтому в диапазоне высоких частот величину, получаемую в соответствии с формулой (5), нельзя рассматривать как характеристику демпфирующих свойств опоры (см. ИСО 10846-1).
Примечание 2 - Если коэффициент потерь мал, то оценка, полученная по формуле (5), становится очень чувствительной к неопределенности измерений. Например, значение коэффициента потерь h(f) = 0,01 соответствует фазовому углу j2,1 = arctg(h) = 0,57°. В этом случае коэффициент потерь рекомендуется определять на основе измерения ширины полосы резонанса колебаний упругой опоры.
8.2 Переходная динамическая жесткость в третьоктавной полосе частот
Значение переходной динамической жесткости, усредненной по частоте в третьоктавной полосе частот, kav определяют по формуле
 (6)
(6)
где суммирование выполняют по пяти и более частотным составляющим.
Примечание 1 - Суммирование квадратов величины позволяет подчеркнуть пиковые значения переходной динамической жесткости, которые обычно имеют наиболее важное значение.
Примечание 2 - Результат вычисления по формуле (6) хорошо согласуется с данными непосредственного усреднения сигнала анализатором в третьоктавной полосе частот в реальном масштабе времени при условии, что функция спектральной плотности входного перемещения u1 является достаточно плоской.
Примечание 3 - Очевидно, что представление результатов измерений в форме переходной динамической жесткости, усредненной по частоте в третьоктавной полосе частот, ведет к потере части информации, в частности, информации о фазе динамической характеристики.
Результат измерений представляют в виде уровня переходной динамической жесткости, усредненной по частоте (см. 3.18).
Среднегеометрическую частоту fm третьоктавной полосы частот определяют по ИСО 266.
8.3 Представление результатов по третьоктавным полосам частот
Данные об уровнях переходной динамической жесткости в третьоктавных полосах частот могут быть представлены в виде таблицы или графика. В таблице указывают среднегеометрические частоты третьоктавных полос и уровни переходной динамической жесткости в децибелах с указанием опорного значения 1 Н × м-1.
График частотной характеристики должен содержать:
- вертикальную шкалу в масштабе 20 мм на каждые 10 дБ или в единицах измеряемой величины с шагом 101/2;
- горизонтальную шкалу в масштабе 5 мм на третьоктавную полосу.
При печати масштаб может быть увеличен или уменьшен при условии сохранения пропорций. Для удобства восприятия на график может быть нанесена масштабная сетка.
Примечание - Пример формата графика приведен на рисунке 8. В дополнение к шкале в децибелах (вертикальная шкала слева) справа приведена вертикальная логарифмическая шкала в ньютонах на метр.
Необходимо точно указывать, для какой динамической характеристики представлены эти данные (т.е. для нормальной или поперечной составляющей поступательного движения), а также приводить данные о температуре воздуха, приложенной статической нагрузке и о других параметрах испытаний.

X - частота, Гц; Y1 - ![]() , дБ (относительно 1 Н×м-1); Y2 - kav, Н × м-1
, дБ (относительно 1 Н×м-1); Y2 - kav, Н × м-1
Рисунок 8 - Пример формата графика для представления уровней
переходной динамической жесткости
в третьоктавных полосах частот в заданных условиях испытаний
8.4 Представление результатов в узких полосах частот
Дополнительно могут быть представлены сведения об амплитудном и фазовом спектрах переходной динамической жесткости, а также коэффициент потерь с указанием разрешения по частоте при анализе в узких полосах частот.
Результаты измерений модуля переходной динамической жесткости представляют в виде графика с указанием опорного значения 1 Н × м-1. Предпочтительным является следующий формат представления данных:
- вертикальная шкала - в масштабе 20 мм на каждые 10 дБ или в единицах измеряемой величины с шагом 101/2;
- горизонтальная шкала - в масштабе 15 мм на октавную полосу.
Результаты измерений фазы представляют в виде графика. Предпочтительным является следующий формат представления данных:
- вертикальная шкала - в масштабе 40 мм на диапазон от минус 180° до плюс 180°;
- горизонтальная шкала - в масштабе 15 мм на октавную полосу.
Результаты измерений коэффициента потерь представляют в виде графика. Предпочтительным является следующий формат представления данных:
- вертикальная шкала - в масштабе 20 мм на изменение коэффициента потерь h в десять раз;
- горизонтальная шкала - в масштабе 15 мм на октавную полосу.
Для представления данных анализа в узких полосах частот в диапазоне от 0 до 20 Гц допускается использовать шкалу частот в линейном масштабе.
Примечание - Требования к масштабу графика при печати приведены в 8.3.
9 Регистрируемая информация
Должна быть зарегистрирована полная информация об условиях испытаний и полученных результатах, в том числе:
a) наименование организации, проводившей испытания;
b) сведения об испытуемом объекте, включая:
- наименование предприятия-изготовителя, модели, заводской номер,
- описание испытуемого объекта с указанием, какие детали упругой опоры были подвергнуты испытаниям, а какие перед испытаниями были удалены,
- данные о возможности опоры уменьшать передаваемую вибрацию, заявленные изготовителем;
c) фотографическое или схематическое изображение испытуемого объекта и испытательной установки, описание устройства создания статической нагрузки;
d) описание плиты распределения вынуждающей силы (при наличии) с указанием размеров, материала, массы, а также способа соединения с испытуемым объектом;
e) спектры ускорения, используемые для проверок выполнения неравенств (1) и (3) (см. 6.1 и 6.4);
f) значение частоты fUL, вплоть до которой выполняются неравенства (1), (2) и (3) (см. 6.1, 6.2 и 6.4);
g) приложенная статическая нагрузка (в ньютонах);
h) температура окружающего воздуха и ее изменения в процессе испытаний (в градусах Цельсия);
i) другие условия испытаний:
- относительная влажность (в процентах),
- условия подготовки испытуемого объекта к испытаниям,
- другие особые условия, влияющие на результат измерений (например, статическое проседание опоры, наведенные низкочастотные колебания с указанием их амплитуды и частоты);
j) описание сигнала (сигналов) возбуждения;
k) спектр уровней ускорения ![]() (или перемещения, если оно является
измеряемой величиной) на входной стороне испытуемого объекта;
(или перемещения, если оно является
измеряемой величиной) на входной стороне испытуемого объекта;
l) использованные средства измерения и анализа данных с указанием их типа, места расположения, изготовителя, заводского номера, сведений о поверках;
m) результаты измерений переходной динамической жесткости, усредненной по частоте в третьоктавных полосах частот, в диапазоне частот до fUL;
n) описание условий и результатов проверки линейности (см. 7.7), включая данные о верхних границах диапазона амплитуд ускорения а1 или перемещения u1, в пределах которых результаты измерений могут считаться достоверными;
о) описание проверки влияния фонового шума на результат измерений;
р) описание проверки влияния вибрации, передаваемой побочным путем, на результат измерений (см. 6.3);
q) диапазоны температур окружающего воздуха и относительной влажности, в пределах которых полученные результаты измерений можно считать достоверными (для испытуемых объектов с высокой чувствительностью к температуре и относительной влажности воздуха).
Дополнительно в протоколе испытаний могут быть приведены следующие сведения:
r) узкополосный спектр модуля переходной динамической жесткости;
s) узкополосный спектр фазы переходной динамической жесткости;
t) узкополосный спектр коэффициента потерь с указанием (и ссылкой на ГОСТ ИСО 10846-1), что эта величина может считаться достоверной характеристикой диссипативных свойств опоры только в области низких частот, на которых влияние инерционных сил внутри испытуемого объекта незначительно);
u) действительная и мнимая части переходной динамической жесткости;
v) информация о верхней границе диапазона входного возбуждения (например, в виде максимального среднеквадратичного значения перемещения), в пределах которого результаты измерений считают достоверными;
w) кривая статического нагружения (см. приложение А).
10 Протокол испытаний
Протокол испытаний должен содержать ссылку на настоящий стандарт и включать в себя информацию, по крайней мере, указанную в перечислениях a), b), g), h), l) и m) раздела 9.
Протокол испытаний должен включать оценку неопределенности измерений (см. 7.6.3).
Приложение А
(справочное)
Кривая статического нагружения
При необходимости к протоколу испытаний может быть приложена диаграмма кривой зависимости проседания опоры от статического нагружения в диапазоне от 0 до 100 % допустимого значения с описанием метода ее получения или ссылкой на соответствующий источникам, например, [6] и [7]).
Приложение В
(рекомендуемое)
В.1 Общие положения
Переходная динамическая жесткость является частотной характеристикой, и неопределенность ее измерений также может зависеть от частоты.
Всегда присутствующей составляющей неопределенности любых измерений является инструментальная неопределенность, обусловленная неидеальностью измерительной системы (акселерометров, датчиков силы, анализаторов сигналов). Эта составляющая неопределенности наиболее легка для контроля, поскольку заявляется поставщиком средств измерений.
Сложнее оценивать и контролировать составляющие неопределенности, связанные с испытательной установкой. Эта сложность обусловлена большим разнообразием как испытательных установок, так и испытуемых объектов. Ввиду отсутствия систематических исследований и результатов межлабораторных сравнительных испытаний по оценке источника неопределенности данного вида, информация о нем весьма скудна. В общем случае эта составляющая неопределенности зависит от сочетания испытательной установки и испытуемого объекта, поэтому будет сложна для оценки для большинства пользователей настоящего стандарта. В особенности это справедливо для очень жестких и крупногабаритных опор, для которых данная составляющая неопределенности может значительно превышать инструментальную неопределенность.
Тем не менее, поскольку метод, установленный настоящим стандартом, содержит ряд жестких требований к условиям испытаний, что само по себе ограничивает неопределенность измерений, некоторые полезные оценки различных источников неопределенности возможны. В разделах настоящего приложения В последовательно рассматриваются источники неопределенности и оценивается их вклад в суммарную неопределенность.
В.2 Уравнение измерений для уровня переходной динамической жесткости, усредненной по частоте
Уравнение измерений уровня переходной динамической жесткости в
третьоктавной полосе частот ![]() имеет вид
имеет вид
![]() (B.1)
(B.1)
![]() - результат измерений уровня
переходной динамической жесткости в третьоктавной полосе частот (см. 8.2);
- результат измерений уровня
переходной динамической жесткости в третьоктавной полосе частот (см. 8.2);
dins - влияющая величина, описывающая инструментальную неопределенность;
drep - влияющая величина, характеризующая повторяемость результатов измерений на одной испытательной установке для одного испытуемого объекта;
drig - влияющая величина, описывающая вклад в неопределенность измерений свойств конкретной испытательной установки;
dlin - влияющая величина, описывающая составляющую неопределенности вследствие нелинейного поведения реальной упругой опоры (см. 7.7).
Примечание - Вид уравнения измерений (В.1) отражает текущее состояние знаний в области испытаний упругих опор. Дальнейшие исследования могут привести к усложнению уравнения измерений.
Вклад каждого источника [слагаемого в уравнении (В.1)] в суммарную неопределенность кратко рассмотрен в В.3 и В.4.
В.3 Стандартные неопределенности
В.3.1 Неопределенность, связанная с обработкой сигналов и фоновым шумом
При выполнении требований к усреднению сигнала (см. 7.5) и отношению сигнал/шум (см. 7.6.1) стандартная неопределенность ![]() для данного
источника неопределенности не будет превышать 0,3 дБ. Данное значение можно
использовать в расчете суммарной неопределенности. Распределение случайной величины
для данного
источника неопределенности не будет превышать 0,3 дБ. Данное значение можно
использовать в расчете суммарной неопределенности. Распределение случайной величины
![]() предполагается
нормальным.
предполагается
нормальным.
В.3.2 Инструментальная неопределенность
Неопределенность, связанная с применяемыми средствами измерений, имеет как случайную, так и систематическую природу. Случайные эффекты могут быть связаны с калибровкой датчиков, систематические - с отклонением передаточной функции измерительной цепи от номинальной характеристики (см. 6.5 - 6.7), с неидентичностью измерительных каналов (см. 6.8), с выбором места установки акселерометров (см. 7.3).
Случайная составляющая в уравнении измерений, соответствующая инструментальной неопределенности, предполагается распределенной по нормальному закону с нулевым средним. Опыт показывает, что при тщательной подготовке к проведению измерений соответствующая стандартная неопределенность uins не будет превышать 0,3 дБ. Однако если ограничиться только соблюдением требований настоящего стандарта без дополнительных уточнений методики проведения измерений, то лучшей оценкой для uins будет 0,5 дБ. Поэтому пользователю настоящего стандарта рекомендуется провести собственные исследования инструментальной неопределенности измерений или использовать оценку uins = 0,5 дБ.
В.3.3 Неопределенность, связанная с установкой испытуемого объекта
Природа неопределенности, связанной с установкой испытуемого объекта в конкретной лабораторной испытательной установке, заключается в конечной динамической жесткости испытательной установки и приспособлений в области контакта с испытуемым объектом. Особенно большим может быть вклад этого источника неопределенности в случае испытуемых объектов больших размеров или использования крупногабаритных вспомогательных приспособлений, например плиты распределения сил (см. 7.1).
В принципе, оценку стандартной неопределенности иrep можно получить из серии повторяющихся экспериментов, в каждом из которых заново выполняют установку испытуемого объекта. Однако такой подход трудноосуществим по экономическим причинам. Тем не менее, испытательной лаборатории рекомендуется составить собственную методику оценки стандартного отклонения случайной величины, связанной с установкой испытуемого объекта, и вида ее распределения.
При отсутствии такой методики пользователям настоящего стандарта
следует давать оценку иrep на основе собственного опыта, связанного с получением результатов
ограниченного числа повторяющихся измерений. Если известно, что максимальная
разность в результатах измерений уровня переходной динамической жесткости,
усредненной по частоте, не превышает 2 дБ и нет каких-либо разумных обоснований
для выбора формы распределения случайной величины, то стандартную
неопределенность, связанную с условиями повторяемости, можно определить по
формуле ![]() дБ.
дБ.
В.3.4 Неопределенность, связанная с испытательной установкой
Составляющая неопределенности, связанная с испытательной установкой, определяется, в первую очередь, несовпадением измеренной силы на выходной стороне испытуемого объекта и затормаживающей силы. Основной причиной такого несовпадения является несоблюдение на практике условия равенства нулю вибрации на выходной стороне испытуемого объекта, т.е. а2 ¹ 0. Если, однако, выполнены требования, заданные неравенствами (1) и (2), то отклонение в оценке затормаживающей силы, обусловленное особенностями испытательной установки, не будет превышать 1,5 дБ.
Если принять распределение случайного отклонения измеренной силы F2 от затормаживающей силы Fb равномерным на интервале от 0 до 1,5 дБ, то стандартная
неопределенность urig будет равна ![]() Однако в ряде случаев влияние данного
источника неопределенности можно уменьшить проведением специального анализа
(см. [8]). Поэтому пользователю
стандарта рекомендуется провести дополнительные исследования, чтобы уменьшить
значение urig. В
противном случае рекомендуется использовать оценку urig = 0,5
дБ.
Однако в ряде случаев влияние данного
источника неопределенности можно уменьшить проведением специального анализа
(см. [8]). Поэтому пользователю
стандарта рекомендуется провести дополнительные исследования, чтобы уменьшить
значение urig. В
противном случае рекомендуется использовать оценку urig = 0,5
дБ.
В.3.5 Неопределенность, связанная с отклонением от линейности
Составляющую неопределенности, обусловленную нелинейным поведением испытуемого объекта, можно удерживать в ограниченных пределах, если отбросить результаты, не удовлетворяющие критерию проверки на линейность. Для результатов, достоверность которых подтверждена в соответствии с 7.7, в качестве оценки максимального отклонения от истинного значения переходной динамической жесткости вследствие нелинейного поведения испытуемого объекта можно принять 1,5 дБ.
Если принять распределение данного отклонения равномерным на
интервале от 0 до 1,5 дБ, то стандартная неопределенность ulin будет
равна ![]()
В.4 Составление бюджета неопределенности
Вклад в суммарную неопределенность измерений случайных величин, входящих в правую часть уравнения измерений (В.1), закон их распределения и коэффициенты чувствительности сi показаны в таблице В.1.
Таблица В.1 - Бюджет неопределенности измерений уровня переходной динамической жесткости, усредненной по частоте
|
Оценка величины, дБ |
Стандартная неопределенность, ui, дБ |
Закон распределения |
Коэффициент чувствительности сi |
Вклад в суммарную неопределенность ciui, дБ |
|
|
|
|
0,3 |
нормальный |
1 |
0,3 |
|
dins |
0 |
0,5 |
0,5 |
||
|
drep |
|
равномерный |
|
||
|
drig |
0,5 |
0,5 |
|||
|
dlin |
|||||
|
a 2p - разность между максимальным и минимальным значениями измеряемой величины в серии повторяющихся измерений. |
|||||
В.5 Расчет расширенной неопределенности
Суммарную стандартную неопределенность уровня переходной
динамической жесткости, усредненной по частоте, u(![]() ) рассчитывают
по формуле
) рассчитывают
по формуле
 (B.2)
(B.2)
Расширенную неопределенность U для доверительной вероятности 95 % в предположении, что распределение суммы пяти независимых случайных величин близко к нормальному, рассчитывают по формуле
U = 2u(![]() ). (B.3)
). (B.3)
Примечание - Поскольку значения стандартных неопределенностей могут зависеть от частоты, то это может потребовать проведения расчета по формуле (В.3) для каждой полосы частот в отдельности.
Приложение ДА
(справочное)
Сведения
о соответствии ссылочных международных стандартов
национальным стандартам Российской Федерации и
действующим в этом качестве межгосударственным стандартам
Таблица ДА.1
|
Обозначение ссылочного международного стандарта |
Степень соответствия |
Обозначение и наименование соответствующего национального стандарта |
|
ИСО 266:1997 |
- |
* |
|
ИСО 2041:2009 |
- |
* |
|
ИСО 5348:1998 |
IDT |
ГОСТ ИСО 5348-2002 «Вибрация и удар. Механическое крепление акселерометров» |
|
ИСО 10846-1:2008 |
IDT |
ГОСТ Р ИСО 10846-1-2010 «Вибрация. Измерения виброакустических передаточных характеристик упругих элементов конструкций в лабораторных условиях. Часть 1. Общие принципы измерений» |
|
ИСО 16063-21:2003 |
IDT |
ГОСТ Р ИСО 16063-21-2009 «Вибрация. Методы калибровки датчиков вибрации и удара. Часть 21. Вибрационная калибровка сравнением с эталонным преобразователем» |
|
Руководство ИСО/МЭК 98-3:2008 |
- |
* |
|
* Соответствующий национальный стандарт отсутствует. До его утверждения рекомендуется использовать перевод на русский язык данного международного стандарта. Перевод данного международного стандарта находится в Федеральном информационном фонде технических регламентов и стандартов. Примечание - В настоящей таблице использовано следующее условное обозначение степени соответствия стандартов: IDT - идентичные стандарты. |
||
Библиография
|
[1] |
ISO 1683, Acoustics - Preferred reference quantities for acoustical levels |
|
[2] |
ISO 2017-1, Mechanical vibration and shock - Resilient mounting systems - Part 1: Technical information to be exchanged for the application of isolation systems |
|
ISO 7626-2, Vibration and shock - Experimental determination of mechanical mobility - Part 2: Measurements using single-point translation excitation with an attached vibration exciter |
|
|
[4] |
ISO 10846-3, Acoustics and vibration - Laboratory measurement of vibro-acoustic transfer properties of resilient elements - Part 3: Indirect method for determination of the dynamic stiffness of resilient supports for translatory motion |
|
[5] |
ISO 10846-4, Acoustics and vibration - Laboratory measurement of vibro-acoustic transfer properties of resilient elements - Part 4: Dynamic stiffness of elements other than resilient supports for translatory motion |
|
DIN 2096-1, Zylindrische Schraubendruckfedern aus runden Drähten und Stäben - Güuteanforderungen bei warmgeformten Druckfedem (Helical compression springs made of round wire and rod - Quality requirements for hot formed compression springs) |
|
|
DIN 2096-2, Zylindrische Schraubendruckfedern aus runden Stäben - Güteanforderungen fur Grobserienfertigung (Cylindrical coil compression springs made from round rods - Quality requirements for mass production) |
|
|
DIEHL, R.J., KURZE, U.J., HOFMANN, P., Laboratory testing of elastic layers for railway application. Proceedings of the Eleventh International Congress on Sound and Vibration, St. Petersburg, Russia, 2004, pp. 3071 - 3078 |
|
|
[9] |
VERMEULEN, R.С.N., LEMMEN, R.L.C., BERKHOFF, A.P., VERHEIJ J.W., Active cancellation of unwanted excitation when measuring dynamic stiffness of resilient elements, Proceedings of Inter.Noise 2001, The Hague, The Netherlands, 2001, pp. 953 - 956 |
Ключевые слова: вибрация, упругая опора, переходная динамическая жесткость, прямой метод измерений, испытания