ОТРАСЛЕВОЙ СТАНДАРТ
|
ОТРАСЛЕВАЯ СИСТЕМА ОБЕСПЕЧЕНИЯ ЕДИНСТВА ИЗМЕРЕНИЙ Методика выполнения измерений линейных ускорений, |
ОСТ 1 00404-80Введен впервые |
Распоряжением Министерства от 30 декабря 1980 г. № 087-16 срок введения установлен с 1 января 1982 г.
Настоящий стандарт устанавливает методику выполнения измерений вектора линейного ускорения, перегрузок, действующих на пилотируемые летательные аппараты (ЛА) в процессе проведения их летных испытаний.
1. ОБЩИЕ ПОЛОЖЕНИЯ
1.1. Вектор линейного ускорения ![]() , обусловленный
действием на ЛА результирующей аэродинамической силы
, обусловленный
действием на ЛА результирующей аэродинамической силы ![]() , силы тяги
, силы тяги ![]() и силы отдачи при стрельбе
из бортового оружия, определяется для характерной точки ЛА и выражается
отношением результирующей
и силы отдачи при стрельбе
из бортового оружия, определяется для характерной точки ЛА и выражается
отношением результирующей ![]() к массе m ЛА,
т.е.
к массе m ЛА,
т.е.
![]() (1)
(1)
____________________
* Все физические величины в формулах, приведенных в стандарте, выражены в единицах, установленных Международной системой единиц.
1.2. Под перегрузкой, действующей на ЛА,
понимается отношение действующего значения вектора линейного ускорения ![]() к
стандартному значению ускорения свободного падения gc
т.е.
к
стандартному значению ускорения свободного падения gc
т.е.
![]() (2)
(2)
или с учетом формулы (1)
![]() (3)
(3)
В условиях пробега ЛА по взлетно-посадочной полосе при взлете и приземлении результирующая сила в этом случае включает в себя силы реакции Земли.
1.3. Измерение вектора линейного ускорения, перегрузок производится измерительными преобразователями, представляющими собой низкочастотные линейные акселерометры (в дальнейшем изложении - акселерометры).
Типы акселерометров, основные параметры и технические требования, предъявляемые к ним, устанавливаются в соответствии с ОСТ 1 03751-86.
Допускается применение акселерометров, принцип действия которых основан на других методах преобразования, но удовлетворяющих требованиям настоящего стандарта.
1.4. Внешние условия применения акселерометров при выполнении измерений в процессе проведения летных испытаний ЛА характеризуются параметрами, установленными ГОСТ 4401-81, особенностями конструкции ЛА и условиями выполнения полета (высотой h, скоростью Vn, широтой места j, направлением полета ψ и др.). Термин «летные испытания» приведен в справочном приложении 1.
Основные параметры внешних условий работы акселерометров приведены в рекомендуемом приложении 2.
Примечание. Под внешними условиями понимаются такие условия, воздействие которых оказывает влияние на метод измерения и приводит к появлению методических погрешностей измерения.
1.5. Градуировка и поверка акселерометров, предназначенных для определения вектора линейного ускорения, перегрузок, действующих на ЛА, должны производиться в соответствии с требованиями ГОСТ 8.179-76 и ГОСТ 8.476-82, определяющих в государственной системе обеспечения единства измерений соответственно: государственный первичный эталон и общесоюзную поверочную схему для средств измерений постоянного линейного ускорения твердого тела в диапазоне 0,001 - 200 м/с2 и государственный специальный эталон и общесоюзную поверочную схему для средств измерений перемещения, скорости и ускорения при колебательном движении твердого тела в диапазоне частот 0,5 - 104 Гц.
1.6. Градуировка каждого акселерометра и определение метрологических характеристик при его эксплуатации выполняются предприятием-потребителем. Поверяемые метрологические характеристики должны выбираться из числа, устанавливаемых ГОСТ 8.009-84 и ОСТ 1 00181-75.
1.7. Требования, предъявляемые при установке акселерометров на ЛА, обусловлены, главным образом, необходимостью уменьшения влияния на результаты измерений непараллельности измерительных осей акселерометров относительно связанной системы осей координат ЛА, а также влияния деформации (за счет нагруженности, изменения температуры и др.) элементов конструкции ЛА, к которым крепятся акселерометры.
2. МЕТОДИКА ОПРЕДЕЛЕНИЯ ВЕКТОРА ЛИНЕЙНОГО УСКОРЕНИЯ, ПЕРЕГРУЗОК, ДЕЙСТВУЮЩИХ НА ЛА ПРИ ПРОВЕДЕНИИ ЛЕТНЫХ ИСПЫТАНИЙ
2.1. Методика определения вектора линейного ускорения и перегрузок основана на измерении трех составляющих - проекций вектора на связанную систему осей координат ЛА, а именно:
- вертикальной составляющей вектора
линейного ускорения (перегрузки) ![]() ;
;
- продольной составляющей вектора
линейного ускорения (перегрузки) ![]() ;
;
- поперечной (боковой) составляющей
вектора линейного ускорения (перегрузки) ![]()
2.2. Знак линейного ускорения, действующего вдоль какой-либо оси координат, совпадает со знаком соответствующей силы. При этом отклонение массы чувствительного элемента вдоль этой оси противоположно направлению действия силы.
Направление движения инертной массы
чувствительных элементов при действии на ЛА положительно направленных
составляющих векторов ![]() и
и
![]() показано на
черт. 1.
показано на
черт. 1.
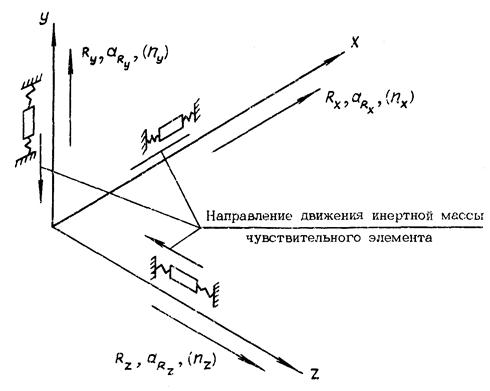
Черт. 1
2.3. Векторы линейного ускорения и перегрузок определяются по формулам:
- модули векторов
![]() (4)
(4)
![]() (5)
(5)
- направляющие косинусы для векторов
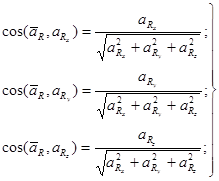 (6)
(6)
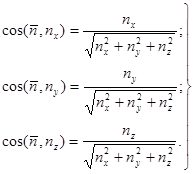 (7)
(7)
При этом aj (nj) должны браться со своими знаками.
2.4. Компоновочная схема размещения акселерометров на ЛА представлена на черт. 2. Положение акселерометров относительно центра масс ЛА характеризуется координатами:
Схема установки акселерометра на ЛА
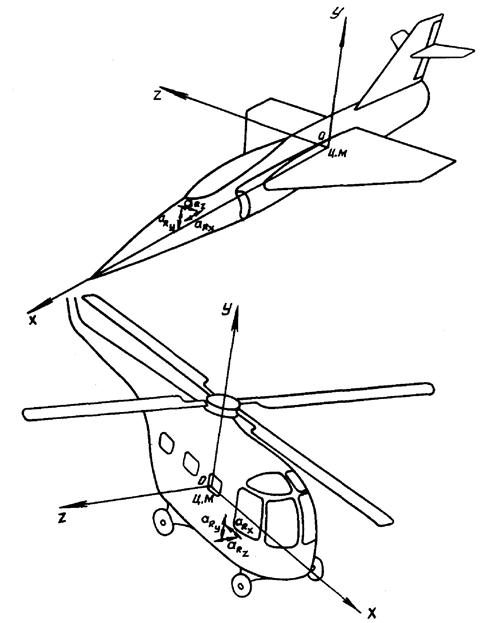
Черт. 2
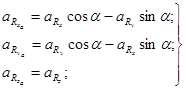
2.5. Значения составляющих векторов линейного ускорения, перегрузок в центре масс ЛА определяются по формулам:
 (8)
(8)
 (9)
(9)
где ![]()
![]()
![]() -
измеренные акселерометрами значения составляющих векторов линейного ускорения,
перегрузок;
-
измеренные акселерометрами значения составляющих векторов линейного ускорения,
перегрузок;
![]()
![]()
![]() - поправки на положение акселерометров
относительно центра масс ЛА (за счет вращения ЛА относительно своего центра
масс).
- поправки на положение акселерометров
относительно центра масс ЛА (за счет вращения ЛА относительно своего центра
масс).
Расчет поправок выполняется по формулам
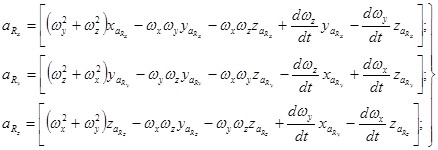 (10)
(10)
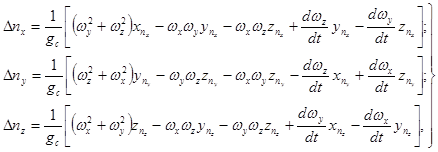 (11)
(11)
где ωx, ωy, ωz - составляющие вектора угловой скорости, направленные по осям связанной системы координат ЛА;
![]()
![]()
![]() -
соответственно составляющие векторов углового ускорения ЛА.
-
соответственно составляющие векторов углового ускорения ЛА.
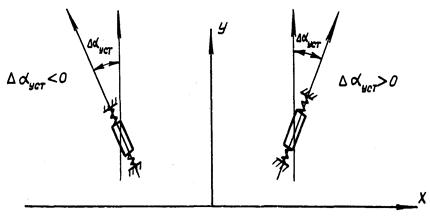
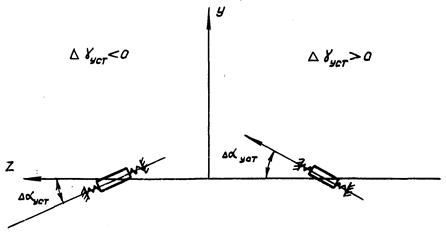
2.6. Не параллельность измерительных осей акселерометров относительно осей связанной системы координат ЛА характеризуется установочными углами Daуст и Dgуст (черт. 3). Положительное значение Daуст принимается при наклоне измерительной оси акселерометра назад, отрицательное - при наклоне вперед. Положительное значение Dgуст принимается при наклоне измерительной оси акселерометра вправо (если смотреть с конца оси ОХ), отрицательное - при наклоне влево.
При внесении поправки на установочный угол, получим:
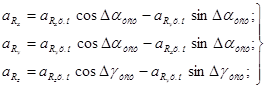 (12)
(12)
Установочный угол акселерометра ![]()
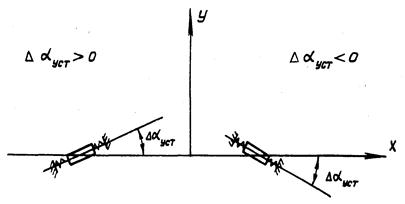
Установочный угол акселерометра ![]()
Установочный угол акселерометра ![]()
Черт. 3
 (13)
(13)
2.7. Значения составляющих вектора линейного ускорения и перегрузок в скоростной системе осей координат (воздушной) определяются по формулам:
 (14)
(14)
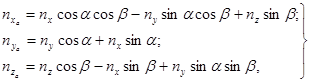 (15)
(15)
где a - угол атаки ЛА;
b - угол скольжения ЛА (ГОСТ 20058-80).
При выполнении полета в плоскости О, Y, Ya, X, Xa (b = 0) значения составляющих вектора линейного ускорения, перегрузок в скоростной системе осей координат (воздушной) определяются по формулам:
 (16)
(16)
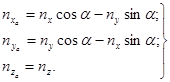 (17)
(17)
Методика измерения угла атаки при летных испытаниях приведена в рекомендуемом приложении 3.
2.8. При необходимости определения вектора линейного ускорения, перегрузок в других системах осей координат (в нормальной земной системе осей координат Оо, Xg, Yg, Zg; в скоростной системе осей координат О, Xn, Yn, Zn, связанной с пространственным углом атаки; в траекторией системе осей координат О, Xк, Yк, Zк и др.), пересчет вектора линейного ускорения, перегрузок должен производиться с использованием направляющих косинусов, составленных на основании углов, определяющих положение осей координат относительно друг друга (ГОСТ 20058-80).
Взаимное положение связанной системы осей координат ЛА относительно земной системы осей координат, скоростной системы осей координат, траекторной и др., а также углы, характеризующие положение осей относительно друг друга, показаны на черт. 1 справочного приложения 4.
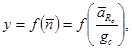
2.9. В расчетах при определении характеристик ЛА в ряде случаев необходимо знать действующее значение ускорения свободного падения ЛА.
Ускорение свободного падения определяется по формуле
 (18)
(18)
где ![]() - коэффициент аппроксимации,
равный 9,8235 м/с2;
- коэффициент аппроксимации,
равный 9,8235 м/с2;
h - высота полета;
rЗ - радиус Земли, равный 6360·103 м;
ωv - угловая скорость ЛА относительно центра Земли за счет полета, рассчитанная по формуле
![]()
где ωЗ - угловая скорость вращения Земли, равная 0,728·10-4 рад/с;
Vn - скорость полета ЛА;
j - географическая широта полета;
ψ - направление полета.
Вывод формулы (18) приведен в обязательном приложении 5.
3. МЕТОДИКА ВЫБОРА АКСЕЛЕРОМЕТРОВ
3.1. Методика выбора акселерометров основана на определении основных метрологических характеристик акселерометров, удовлетворяющих требованиям, предъявляемым к измерению составляющих вектора линейного ускорения, перегрузок при летных испытаниях ЛА.
3.2. Пригодность акселерометра для применения в зависимости от этапов и задач испытаний ЛА характеризуется допустимой суммарной погрешностью измерения, а также требуемым коэффициентом преобразования и диапазоном регистрируемых частот.
4. ПОВЕРКА И ГРАДУИРОВКА АКСЕЛЕРОМЕТРОВ
4.1. При проведении поверки следует выполнять операции, указанные в табл. 1.
Таблица 1
|
Обязательность проведения операции при |
|||
|
первоначальной подготовке акселерометра для установки на ЛА |
ремонте |
периодической (внеочередной) поверке |
|
|
Внешний осмотр |
+ |
+ |
+ |
|
Опробование |
+ |
+ |
+ |
|
Определение сопротивления изоляции |
+ |
+ |
+ |
|
Проверка электрической прочности изоляции |
+ |
+ |
|
|
Определение градуировочной характеристики |
+ |
+ |
+ |
|
Определение чувствительности |
+ |
+ |
+* |
|
Определение диапазона измерения |
+ |
+ |
+ |
|
Определение основной погрешности |
+ |
+ |
+ |
|
Определение систематических погрешностей от воздействующих факторов |
+ |
+ |
+* |
|
Определение амплитудной и фазочастотной характеристики |
+ |
+** |
+* |
|
Определение коэффициента корреляции между погрешностями |
+ |
+* |
|
|
Примечание. Знак «+» - поверка проводится. Знак «-» - поверка не проводится. * Поверка проводится в зависимости от поставленной задачи. ** При поверке определяется коэффициент демпфирования. |
|||
4.2. Перечень средств поверки и их нормативно-технические характеристики представлены в табл. 2 и рекомендуемом приложении 6.
Таблица 2
|
Средства поверки и их нормативно-технические характеристики |
|
|
Внешний осмотр |
|
|
Опробование |
Лабораторный пульт поверки акселерометра (контрольно-поверочная аппаратура) предприятия-разработчика акселерометра или пульт поверки, созданный на базе стандартизованных измерительных средств |
|
Определение сопротивления изоляции |
Средства поверки выбираются в соответствии с нормативно-технической документацией на акселерометр или в соответствии с ГОСТ 21657-83 |
|
Определение прочности изоляции |
|
|
Градуировка |
Установка в соответствии с требованиями локальной поверочной схемы. |
|
Определение чувствительности |
|
|
Определение диапазона измерения |
Электронный вольтметр 1-го класса по ГОСТ 9781-85. |
|
Определение основной погрешности |
|
|
Определение амплитудной и фазочастотной характеристик в соответствии с ГОСТ 8.009-84 |
Измерительные мосты по ГОСТ 9486-79 и ГОСТ 7165-78. |
|
Частотомер с погрешностью 0,001 % по ГОСТ 7590-78. |
|
|
Низкочастотный измерительный генератор сигналов с коэффициентом гармоник не более 0,5 % по ГОСТ 10501-81 |
|
|
Определение систематических погрешностей от воздействующих факторов |
Устройства воспроизведения и контроля влияющих физических величин |
|
Примечание. Допускается применение средств поверки, не указанных в настоящей методике, прошедших метрологическую аттестацию в органах государственной службы и удовлетворяющих требованиям табл. 2. |
|
4.3. При проведении поверки акселерометров должны соблюдаться нормальные условия измерений:
- температура окружающей среды 293 К ± 5 К (20 °С ± 5 °С);
- атмосферное давление, 101,3 КПа (760 мм рт. ст.);
- относительная влажность (65 ± 15) %;,
- уровень акустических полей, не более 60 дБ;
- частота переменного тока сети питания (50 ± 0,5) Гц;
- отклонение напряжения питания от номинального значения, указанного в технических условиях и эксплуатационной документации на акселерометр конкретного типа, не более ±2 %;
- уровень внешних электрических и магнитных полей, а также действия вибрации должны быть в пределах норм, установленных в технических условиях и эксплуатационной документации на акселерометр конкретного типа и промежуточные преобразователи измерительной информации, входящие в комплект поверочных средств.
4.4. Подготовка и поверка образцовых поверочных и вспомогательных средств измерений, а также крепления поверяемых акселерометров на образцовых установках должны выполняться в соответствии методик поверки, применяемых при поверках.
4.5. Проведение поверки
4.5.1. Одновременно с внешним осмотром акселерометра производится также проверка его массы, габаритных и присоединительных размеров.
4.5.1.1. При внешнем осмотре должно быть установлено:
- отсутствие электрических и механических повреждений;
- отсутствие грязи или смазки на штепсельных разъемах;
- наличие приспособления, которое препятствует вскрытию акселерометра без нарушения клейма или пломбы;
- наличие пломбы;
- наличие маркировки акселерометра;
- наличие паспорта.
4.5.1.2. При взвешивании акселерометра погрешность оценки его массы должна быть не более ±5 % от измеряемой величины.
4.5.1.3. Габаритные и установочные размеры акселерометров должны соответствовать требованиям ОСТ 1 03751-86.
4.5.1.4. В случае несоответствия акселерометра хотя бы одному из указанных требований, он признается непригодным к применению (проводятся мероприятия по устранению недостатков).
4.6. Опробование акселерометра
4.6.1. Опробование акселерометра производится посредством поверочного лабораторного пульта, с помощью которого акселерометр подключается к источнику питания и осуществляется подача на акселерометр стимулирующих сигналов; выходной сигнал акселерометра подается на визуальный показывающий прибор.
4.6.2. При опробовании проверяется функционирование акселерометра при изменении его положения в гравитационном поле Земли и при подаче на него стимулирующих сигналов, определяется потребляемая сила тока и характеристика выходного сигнала, для чего, если в этом есть необходимость, производится легкое постукивание по акселерометру.
4.7. Определение сопротивления изоляции и проверка ее электрической прочности
4.7.1. Сопротивление изоляции проверяется между измерительными цепями и корпусом акселерометра (при этом все выходные контакты измерительной цепи должны быть соединены между собой накоротко), а также между измерительными цепями и цепями вспомогательных элементов акселерометра (цепями питания электромоторов, термостатов и др.).
4.7.2. Сопротивление изоляции должно быть не менее 20 МОм или значения, указанного в технических условиях на акселерометр.
4.7.3. Электрическая прочность изоляции проверяется между измерительными цепями и корпусом акселерометра, а также между измерительными цепями и цепями вспомогательных элементов акселерометра.
4.7.4. Проверка электрической прочности изоляции проводится на установке, позволяющей плавно повышать испытательное напряжение от нуля до заданного значения, указанного в технических условиях на акселерометр. Мощность установки (на стороне высокого напряжения) должна быть не менее 0,25 кВ·А, и измерение испытательного напряжения должно проводиться на стороне высокого напряжения.
Форма кривой напряжения должна быть такой, чтобы отношение амплитудного значения напряжения к действующему находилось в пределах 1,34 - 1,48.
Скорость изменения напряжения от нуля до заданного значения должна быть за время от 5 до 20 с. Уменьшение напряжения до нуля должно производиться с той же скоростью.
4.8. При проведении работ по поверке акселерометров должны соблюдаться «Правила технической эксплуатации электроустановок потребителей» и «Правила техники безопасности при эксплуатации электроустановок потребителей», утвержденные Госэнергонадзором, и требования, установленные ГОСТ 12.2.007.0-75.
На каждый тип поверочной установки должны быть разработаны правила проведения работ на ней и правила техники безопасности.
4.9. Поверку акселерометров должны проводить лица, прошедшие курс обучения и имеющие право на проведение поверки.
4.10. Определение градуировочной характеристики акселерометров
4.10.1. Определение градуировочной характеристики акселерометра производится в процессе градуировки его, при этом определяются:
- диапазон измерения (по выходу);
- номинальная градуировочная
характеристика, выражающая зависимость выходного сигнала либо в функции
линейного ускорения (![]() ), либо в функции перегрузки
), либо в функции перегрузки ![]() :
:
![]() (19)
(19)
 (20)
(20)
где ![]() - ускорения, воспроизводимые
образцовыми установками;
- ускорения, воспроизводимые
образцовыми установками;
gc - стандартное ускорение свободного падения, равное 9,80665 м/с2;
y - величина выходного сигнала.
4.10.2. При применении в процессе градуировки акселерометра поворотной установки (использование принципа поворота акселерометра в гравитационном поле Земли) должно быть известно местное значение ускорения свободного падения (gм), полученное с точностью до пятого знака.
Значение линейного ускорения определяется в соответствии с наклоном поворотного стола пропорционально местному значению ускорения свободного падения, т.е.
![]() (21)
(21)
Значение перегрузки в этом случае рассчитывается по формуле
![]() (22)
(22)
где a - фиксированные значения угла наклона плоскости поворотного стола к уровню горизонта.
В случае, если градуировка акселерометра производится на центрифуге, воспроизводимое постоянное ускорение, перегрузки определяются по формулам
![]() (23)
(23)
 (24)
(24)
где ωст.ц - угловая скорость вращения стола центрифуги;
Rст.ц - расстояние от оси вращения до центра масс чувствительного элемента акселерометра.
Градуировка акселерометров должна производиться в соответствии с требованиями ОСТ 1 00108-73 и ОСТ 1 00181-75.
Градуировочная характеристика средства измерений имеет вид степенного полинома и определяется оценкой коэффициентов a0; а1; a2, ..., aк:
х = а0 + а1у + а2у2 + ... + aкук, (25)
где x - входной сигнал средства измерения;
y - выходной сигнал средства измерения;
к - максимальная степень полинома, которым выражена градуировочная характеристика рассматриваемого средства измерения;
aк - коэффициент степенного полинома.
При обработке результатов измерений выбор степени полинома, аппроксимирующего градуировочную характеристику, осуществляется по критерию минимума СКО случайной составляющей погрешности.
4.11. Определение основной погрешности акселерометра
4.11.1. При нормировании метрологических характеристик индивидуально градуируемых средств основная погрешность включает:
- погрешность образцовых средств измерений;
- случайную составляющую погрешности;
- нестабильность градуировочной характеристики во времени.
4.11.2. Случайная составляющая погрешности характеризуется рассеянием градуировочных точек относительно полученного аппроксимирующего полинома.
СКО случайной составляющей погрешности определяется по формуле
 (26)
(26)
где N - число измерений;
к - степень полинома, аппроксимирующего градуировочную характеристику;
xi - значение входной величины при градуировке для выходного сигнала;
![]() -
значение входной величины, оцененное по полиному для того же выходного сигнала.
-
значение входной величины, оцененное по полиному для того же выходного сигнала.
Аппроксимация градуировочной зависимости осуществляется по методу наименьших квадратов.
При обнаружении больших величин СКО случайной составляющей погрешности необходима тщательная проверка числового материала на наличие грубых погрешностей.
Исключение грубых погрешностей измерений производится:
- на предварительном этапе рассмотрения результатов измерения, если известно о некондиционной работе средства измерения;
- выделение грубых погрешностей из ряда измерений с применением методов математической статистики.
Для этого определяется принадлежность результатов градуировки к нормальному закону распределения с учетом количества результатов наблюдений (при N > 50, при N < 50).
Грубые погрешности исключаются.
При распределении случайной величины по закону, отличному от нормального (закон неизвестен), значение критерия для определения грубых, погрешностей определяется по формулам
 если xв <
если xв < ![]() ; (27)
; (27)
 если xв >
если xв > ![]() . (28)
. (28)
Если любое из неравенств выполняется, то значение xв выделяется как грубая ошибка.
Данный критерий использует аппроксимирующую систему распределения Пирсона.
Аa/2 и А1-a/2 - квантили системы распределения Пирсона для уровня значимости a - вероятности ошибки первого рода (уровень значимости) - определяются в зависимости от третьего и четвертого центральных моментов ряда измерений.
Оценки третьего (μ3) и четвертого (μ4) центральных моментов рассчитываются по формулам:
 (29)
(29)
 (30)
(30)
Значения квантилей Аa/2 и А1-a/2 нормированных случайных величин системы
распределения Пирсона в зависимости от ![]() и μ4 для a = 0,005
приведены в табл. 3 и 4.
и μ4 для a = 0,005
приведены в табл. 3 и 4.
Таблица 3
|
Значения μ4 |
Значения
|
||||||||||||||
|
0,00 |
0,01 |
0,03 |
0,05 |
0,10 |
0,15 |
0,20 |
0,30 |
0,40 |
0,50 |
0,60 |
0,70 |
0,80 |
0,90 |
1,00 |
|
|
Значения Аa/2 |
|||||||||||||||
|
1,8 |
1,71 |
- |
- |
- |
- |
- |
- |
- |
- |
- |
- |
- |
- |
- |
- |
|
2,0 |
1,92 |
1,80 |
1,71 |
1,64 |
- |
- |
- |
- |
- |
- |
- |
- |
- |
- |
- |
|
2,2 |
2,10 |
1,99 |
1,89 |
1,82 |
1,68 |
1,56 |
1,46 |
- |
- |
- |
- |
- |
- |
- |
- |
|
2,4 |
2,26 |
2,14 |
2,04 |
1,97 |
1,83 |
1,71 |
1,62 |
1,44 |
- |
- |
- |
- |
- |
- |
- |
|
2,6 |
2,38 |
2,27 |
2,18 |
2,12 |
1,98 |
1,87 |
1,77 |
1,58 |
1,42 |
- |
- |
- |
- |
- |
- |
|
2,8 |
2,49 |
2,38 |
2,30 |
2,23 |
2,10 |
1,99 |
1,89 |
1,71 |
1,55 |
1,41 |
- |
- |
- |
- |
- |
|
3,0 |
2,58 |
2,48 |
2,39 |
2,33 |
2,21 |
2,11 |
2,01 |
1,84 |
1,68 |
1,53 |
1,40 |
- |
- |
- |
- |
|
3,2 |
2,65 |
2,55 |
2,48 |
2,42 |
2,30 |
2,20 |
2,10 |
1,95 |
1,79 |
1,65 |
1,51 |
1,39 |
1,27 |
- |
- |
|
3,4 |
2,71 |
2,61 |
2,54 |
2,48 |
2,38 |
2,28 |
2,20 |
2,04 |
1,90 |
1,76 |
1,62 |
1,50 |
1,37 |
1,27 |
- |
|
3,6 |
2,76 |
2,67 |
2,60 |
2,54 |
2,44 |
2,35 |
2,27 |
2,13 |
1,99 |
1,85 |
1,72 |
1,60 |
1,48 |
1,37 |
1,27 |
|
3,8 |
2,80 |
2,71 |
2,65 |
2,60 |
2,50 |
2,41 |
2,34 |
2,20 |
2,07 |
1,94 |
1,82 |
1,70 |
1,58 |
1,47 |
1,37 |
|
4,0 |
2,83 |
2,75 |
2,69 |
2,64 |
2,54 |
2,47 |
2,39 |
2,26 |
2,14 |
2,02 |
1,90 |
1,78 |
1,67 |
1,56 |
1,45 |
|
4,2 |
2,87 |
2,79 |
2,72 |
2,68 |
2,59 |
2,51 |
2,44 |
2,32 |
2,20 |
2,09 |
1,97 |
1,86 |
1,75 |
1,65 |
1,54 |
|
4,4 |
2,90 |
2,82 |
2,76 |
2,71 |
2,62 |
2,55 |
2,49 |
2,37 |
2,25 |
2,15 |
2,04 |
1,93 |
1,83 |
1,73 |
1,62 |
|
4,6 |
2,92 |
2,85 |
2,79 |
2,74 |
2,66 |
2,59 |
2,52 |
2,41 |
2,30 |
2,20 |
2,10 |
2,00 |
1,90 |
1,80 |
1,70 |
|
4,8 |
2,94 |
2,87 |
2,81 |
2,77 |
2,69 |
2,62 |
2,56 |
2,45 |
2,35 |
2,25 |
2,15 |
2,05 |
1,96 |
1,87 |
1,77 |
|
5,0 |
2,96 |
2,89 |
2,83 |
2,79 |
2,71 |
2,65 |
2,59 |
2,48 |
2,39 |
2,29 |
2,20 |
2,11 |
2,01 |
1,92 |
1,84 |
|
Примечание. Если коэффициент ассиметрии положителен, т.е. если μ3 > 0, то табличные значения следует брать со знаком минус. |
|||||||||||||||
Таблица 4
|
Значения μ4 |
Значения
|
||||||||||||||
|
0,00 |
0,01 |
0,03 |
0,05 |
0,10 |
0,15 |
0,20 |
0,30 |
0,40 |
0,50 |
0,60 |
0,70 |
0,80 |
0,90 |
1,00 |
|
|
Значения А1-a/2 |
|||||||||||||||
|
1,8 |
1,71 |
- |
- |
- |
- |
- |
- |
- |
- |
- |
- |
- |
- |
- |
- |
|
2,0 |
1,92 |
2,01 |
2,06 |
2,09 |
- |
- |
- |
- |
- |
- |
- |
- |
- |
- |
- |
|
2,2 |
2,10 |
2,19 |
2,24 |
2,27 |
2,31 |
2,33 |
2,35 |
- |
- |
- |
- |
- |
- |
- |
- |
|
2,4 |
2,26 |
2,35 |
2,41 |
2,44 |
2,49 |
2,52 |
2,53 |
2,53 |
- |
- |
- |
- |
- |
- |
- |
|
2,6 |
2,38 |
2,48 |
2,54 |
2,57 |
2,63 |
2,66 |
2,68 |
2,70 |
2,69 |
- |
- |
- |
- |
- |
- |
|
2,8 |
2,49 |
2,58 |
2,64 |
2,68 |
2,73 |
2,77 |
2,80 |
2,83 |
2,84 |
2,83 |
- |
- |
- |
- |
- |
|
3,0 |
2,58 |
2,66 |
2,72 |
2,76 |
2,82 |
2,86 |
2,89 |
2,93 |
2,95 |
2,96 |
2,95 |
- |
- |
- |
- |
|
3,2 |
2,65 |
2,73 |
2,79 |
2,83 |
2,89 |
2,93 |
2,96 |
3,01 |
3,04 |
3,06 |
3,07 |
3,06 |
3,04 |
- |
- |
|
3,4 |
2,71 |
2,79 |
2,85 |
2,88 |
2,95 |
2,99 |
3,02 |
3,07 |
3,11 |
3,13 |
3,15 |
3,16 |
3,15 |
3,14 |
- |
|
3,6 |
2,76 |
2,84 |
2,89 |
2,93 |
2,99 |
3,03 |
3,07 |
3,12 |
3,16 |
3,19 |
3,22 |
3,23 |
3,24 |
3,24 |
3,23 |
|
3,8 |
2,80 |
2,88 |
2,93 |
2,97 |
3,03 |
3,07 |
3,11 |
3,16 |
3,20 |
3,24 |
3,27 |
3,29 |
3,30 |
3,31 |
3,32 |
|
4,0 |
2,83 |
2,91 |
2,96 |
3,00 |
3,06 |
3,10 |
3,14 |
3,20 |
3,24 |
3,28 |
3,31 |
3,34 |
3,36 |
3,37 |
3,38 |
|
4,2 |
2,87 |
2,94 |
2,99 |
3,03 |
3,09 |
3,13 |
3,17 |
3,22 |
3,27 |
3,31 |
3,34 |
3,37 |
3,40 |
3,42 |
3,43 |
|
4,4 |
2,90 |
2,97 |
3,02 |
3,05 |
3,11 |
3,15 |
3,19 |
3,25 |
3,29 |
3,33 |
3,37 |
3,40 |
3,42 |
3,45 |
3,47 |
|
4,6 |
2,92 |
2,99 |
3,04 |
3,07 |
3,13 |
3,17 |
3,21 |
3,27 |
3,31 |
3,36 |
3,39 |
3,42 |
3,44 |
3,47 |
3,50 |
|
4,8 |
2,94 |
3,01 |
3,06 |
3,09 |
3,15 |
3,19 |
3,23 |
3,28 |
3,33 |
3,37 |
3,41 |
3,44 |
3,47 |
3,49 |
3,52 |
|
5,0 |
2,96 |
3,03 |
3,07 |
3,11 |
3,16 |
3,21 |
3,24 |
3,30 |
3,35 |
3,39 |
3,43 |
3,46 |
3,49 |
3,52 |
3,54 |
|
Примечание. Если коэффициент ассимметрии положителен, т.е. если μ3 > 0, то табличные значения следует взять со знаком минус. |
|||||||||||||||
4.11.3. Нестабильность градуировочной характеристики оценивается как разница в значениях полиномов, определенных через определенный интервал времени.
Необходимо сравнивать полиномы одной и той же степени.
4.12. Действия влияющих величин выражаются:
- в сдвиге и повороте градуировочной характеристики, относительно градуировочной характеристики, полученной в нормальных условиях;
- в изменении случайной составляющей погрешности.
4.12.2. Для каждого из значений влияющих величин производится аппроксимация градуировочной характеристики.
В результате аппроксимации в общем случае получается совокупность градуировочных характеристик:
yμ(x) = a0μ + a1μx + a2μ(x)2 + ... + aкμ(x)к (31)
где μ = 1, 2, ..., с - номера значений влияющих величин, имеющих место при эксперименте.
Функции влияния для каждого из коэффициентов aкμ определяются по методу наименьших квадратов в виде отклонений величины коэффициентов от значений, полученных в нормальных условиях.
Обычно степень полинома, аппроксимирующего градуировочную характеристику, не превышает 2 - 3-й степени, а полином, определяющий функцию влияния, - 1 - 2-й степени.
В результате аппроксимации получается функция влияния вида
Daμy = b1μ(zμ - zμн) + b2μ(zμ - zμн)2, (32)
где zμ и zμн - значение μ-й влияющей величины, измеренные и соответствующие нормальным условиям;
b1, b2 - коэффициент функции влияния.
Данная функция влияния получена при раздельном действии влияющих величин для каждой влияющей величины.
4.13. Определение динамических характеристик акселерометра
Динамическая характеристика выражается передаточной функцией W(p), которая представляет собой отношение преобразования Лапласа y(p) выходного сигнала y(t) к преобразованию Лапласа x(р) входного сигнала x(t), т.е.
![]() (33)
(33)
где р - комплексная переменная.
Если р принимает чисто мнимое значение, т.е. р = jω, то передаточная функция выразится зависимостью
W(jω) = B(ω) + jм(ω). (34)
Функции B(ω) и М(ω) называются соответственно вещественной и мнимой частотными характеристиками. Выражение для частотной характеристики может быть представлено в виде
W(jω) = A(ω)ejj(ω). (35)
Вещественные функции A(ω) и j(ω) называются амплитудной и фазовой частотными характеристиками.
4.14. Оформление результатов поверки
4.14.1. Положительные результаты поверки акселерометров вносятся в паспорт акселерометра и специальный журнал прохождения периодических поверок данного акселерометра.
4.14.2. Результаты поверки и градуировки акселерометров, а также их метрологические характеристики заносятся в протокол, который приведен в рекомендуемом приложении 7.
4.14.3. Акселерометры, не соответствующие требованиям технических условий на них, признаются непригодными для эксплуатации; в их паспорта заносятся отметки о непригодности с указанием причин неисправности.
5. ТРЕБОВАНИЯ К РАЗМЕЩЕНИЮ И СПОСОБЫ КРЕПЛЕНИЯ АКСЕЛЕРОМЕТРОВ НА ЛЕТАТЕЛЬНОМ АППАРАТЕ
5.1. Акселерометры на ЛА должны устанавливаться в его центре масс, и при этом направление осей акселерометров должно совпадать с направлением осей связанной системы координат ЛА.
5.2. Для снижения систематических ошибок измерения, обусловленных установкой акселерометра на ЛА, в общем случае допустимая непараллельность осей должна соответствовать требованиям технических условий на ценный тип акселерометра.
В особых случаях, в частности, при определении аэродинамических и тяговых характеристик ЛА (Сx, Сy, Сp), допустимая не параллельность осей не должна превышать 5 - 10'. Если плоскость симметрии акселерометра совпадает с плоскостью симметрии ЛА или параллельна ей, то допуск на непараллельность продольных и вертикальных осей должен соответствовать требованиям технических условий на данный тип акселерометра.
5.3. Если акселерометры установлены вне центра масс ЛА, производится определение координат акселерометра относительно центра масс. Координаты акселерометров заносятся в кроссировочную таблицу измерений.
Погрешность определения координат не должна превышать ± 20 мм.
В связи с тем, что положение центра масс ЛА в полете изменяется, в ряде случаев при обработке результатов (при пересчете измеренных значений линейных ускорений, перегрузок) необходимо учитывать изменение положения центра масс относительно первоначального положения, установленного до полета.
5.4. Материал и жесткость конструкции кронштейнов выбираются такими, чтобы обеспечить заданную не параллельность осей акселерометра и ЛА в процессе полета при воздействии на конструкцию перегрузок и возможных перепадов температур.
Кроме того, жесткость конструкции кронштейна не должна приводить к возникновению резонансных колебаний кронштейна с преобразователем.
5.5. Крепление кронштейнов с акселерометрами должно производиться к таким силовым элементам ЛА, деформации которых незначительны.
5.6. В целях обеспечения технологичности в эксплуатации целесообразно акселерометры закреплять на переходном кронштейне, устанавливаемом на нивелировочной площадке.
Нивелировочная площадка на ЛА должна строго выставляться в плоскости симметрии продольной и поперечной осей связанной системы координат ЛА либо параллельно ей. Допустимая непараллельность установочной плоскости нивелировочной площадки относительно плоскости O, X, Z должна быть не более ± 15'.
5.7. Для установки нивелировочной площадки акселерометров производится выставление связанных осей ЛА посредством нивелирования в плоскости горизонта, соблюдая все правила нивелирования данного типа ЛА (не менее чем при четырех точках опоры). После чего устанавливается нивелировочная площадка акселерометров строго горизонтально посредством уровня или оптического угломера КО-10.
5.8. На нивелировочной площадке акселерометров наносятся риски, которые ориентируются относительно осей ОХ, OZ связанной системы координат ЛА.
Кронштейн, на котором выставляются оси акселерометра относительно его базовой поверхности, также должен иметь риски, позволяющие выставить измерительную ось акселерометра относительно рисок нивелировочной площадки.
5.9. После установки акселерометров на ЛА производится регистрация установочных углов (Daуст и Dgуст) по отношению к связанной системе осей координат ЛА (последний должен находиться в плоскости горизонта).
На нивелировочной площадке или в удобном месте на ЛА выбирается площадка для установки угломера, посредством которого при подготовке измерительных средств определяется угловое положение ЛА относительно горизонта и оценивается правильность работы акселерометра в гравитационном поле Земли.
5.10. Условия эксплуатации акселерометров на ЛА должны соответствовать требованиям ОСТ 1 03751-86.
5.11. Основные измерительные средства, с помощью которых производится установка и контроль установки акселерометров на ЛА:
- квадрант оптический - КО-10 ГОСТ 14967-80.
- нивелир высокоточный - НА-1 ГОСТ 10528-76;
- теодолит - ТБ-1, ТТ-5 ГОСТ 10529-86;
- рейка ГОСТ 11158-83;
- рулетка - Р3-20 ГОСТ 7502-80.
6. АЛГОРИТМ ИЗМЕРЕНИЙ
6.1. Общий алгоритм измерений должен соответствовать установленному согласно техническим условиям на средства измерений.
ПРИЛОЖЕНИЕ 1
Справочное
ТЕРМИНЫ И ИХ ОПРЕДЕЛЕНИЯ
|
Термин |
Определение |
|
Летные испытания |
Все виды испытаний ЛА и их бортовых систем, проводимые в условиях полета |
ПРИЛОЖЕНИЕ 2
Рекомендуемое
1. ВНЕШНИЕ УСЛОВИЯ РАБОТЫ АКСЕЛЕРОМЕТРА
1.1. Под внешними условиями понимаются такие условия, воздействие которых оказывает влияние на метод измерения и приводит к появлению методических погрешностей измерения.
К ним относятся:
- условна окружающей среды (воздушной среды, гравитационного поля Земли, вращение и форма Земли и др.);
- направление полета и местонахождение ЛА;
- угловые скорости и ускорения относительно центра масс, вызванные маневрированием ЛА;
- угловые скорости и ускорения, вызванные упругими изгибными и крутильными деформациями конструкции ЛА;
- статические, изгибные и крутильные деформации конструкции ЛА.
1.2. Воздушная среда земной атмосферы
1.2.1. Воздушная среда земной атмосферы характеризуется давлением, плотностью, температурой, влажностью, турбулентностью, скоростью течений воздушной среды, параметры которых меняются в зависимости от времени года и суток, координат места, метеорологических условий, солнечной активности и других факторов.
1.2.2. Вместо действительных характеристик атмосферы, являющихся случайными функциями времени и пространства, влиянием которых на работу акселерометров в ряде случаев можно пренебречь, а в ряде случаев влияние которых необходимо избежать, в качестве модели атмосферы принимают характеристики, соответствующие ГОСТ 4401-81.
В ГОСТ 4401-81 вместо действительных характеристик приведены средние значения (математические ожидания) их при следующих граничных условиях:
давление воздуха над уровнем моря (поверхность героида)
на широте 45°, кПа (мм рт. ст.)........................................ 101,3 (760)
температура, К (°С)........................................................... 288,15 (+15)
плотность воздуха, кг/м3................................................... 1,225
скорость звука, м/с............................................................ 340,294
Действительная нестационарность параметров атмосферы приведет к некоторому разбросу результатов измерений.
1.3. Параметры Земли, влияющие на результаты измерений
1.3.1. Особенности геометрической формы Земли, строение поверхности, вращение и параметры гравитационного поля оказывают значительное влияние на работу акселерометров.
1.3.2. Точное математическое описание формы Земли с практической точки зрения неудобно, поэтому имеется ряд моделей, упрощающих эту задачу. Более точные модели предполагают, что Земля является эллипсоидом, симметричным полярному и экваториальному диаметрам и построенному по среднему уровню моря.
1.3.3. В практике для решения различных задач применяются следующие модели Земли: в США используется эллипсоид Кларка, в европейских странах - эллипсоид Бесселя, в Советском Союзе - эллипсоид Красовского со следующими размерами:
- большая полуось (экватоиальный радиус Земли) a = 6378245 м;
- малая полуось (полярный радиус Земли) b = 6356863 м;
- эллиптичность (сжатие) ![]()
1.3.4. Для решения задач, не требующих высокой точности, Земля по форме принимается близкой к шару-сфероиду, описываемому простым математическим выражением.
Клеро вывел зависимость между изменением силы тяжести от экватора к полюсам и сжатием сфероида. Его вывод был точен только для малых членов порядка величины сжатия, при такой точности сфероид и эллипсоид неразличимы.
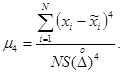
1.3.4.1. За сфероид принимается эквипотенциальная поверхность гравитационного поля Земли, охватывающая всю ее массу. Начало координат 0 помещается в центре масс Земли, ось Z декартовых координат направлена по оси вращения, оси X и У расположены в плоскости экватора, ось X расположена в плоскости начального меридиана (черт. 1).
1.3.4.2. Расстояние r
от центра Земли до точки М на поверхности сфероида (модуль геоцентрического
радиуса-вектора ![]() ) находится из уравнения Клеро
) находится из уравнения Клеро
![]() (1)
(1)
Используя сферические и полярные координаты, выполнив соответствующие преобразования в уравнении (1) и произведя упрощение, для определения r пользуются формулой
r = a(1 - esin2j). (2)
а - сферическая и полярная системы координат; б - направление вертикалей
Черт. 1
В ГОСТ 4401-81 за условный радиус Земли принят радиус r3 = 6356766 м, при котором ускорение свободного падения и вертикальный градиент на среднем уровне моря наиболее близки к истинным на широте 45°32'33''.
1.3.4.3. Для решения практических задач в сфероидальной Земле используются следующие вертикали (см. черт. 1):
- геоцентрическая вертикаль - линия, характеризующая положение точки и проходящая через центр Земли;
- линия отвеса - линия, характеризующая направление вектора силы тяжести, являющегося суммарным вектором гравитационного ускорения и центростремительного ускорения, вызванного вращением Земли;
- гравитационная вертикаль - линия, совпадающая с направлением поля тяготения Земли.
1.3.4.4. Угол между геоцентрической вертикалью и плоскостью экватора образует геоцентрическую широту j.
Угол между линией отвеса и экваториальной плоскостью образует географическую широту j'.
Угол между гравитационной вертикалью и экваториальной плоскостью является гравитационной широтой j''.
Угол между географической и геоцентрической широтами определяется по приближенной формуле
j' - j = esin2j. (3)
На широте 45° разность j' - j достигает максимума, т.е. 11'30''.
Угол между направлением силы тяжести и силы тяготения определяется формулой
j' - j'' = 5,9'sin2j. (4)
1.3.5. Существенную роль в работе акселерометра играет вращение Земли.
1.3.5.1. Земля совершает сложное движение, включающее:
- вращение вокруг своей оси с Запада на Восток с периодом в 23 ч 56 мин 4,091 с = 86164,091 с среднего солнечного времени, или 24 ч = 86400 с звездного времени; угловая скорость при этом соответственно равна
![]()
Вектор угловой скорости Земли направлен по оси вращения от южного полюса к северному в соответствии с правилами законов для правых систем координат;
- годичное обращение вокруг Солнца со средней скоростью движения по орбите 29,893 км/с;
- нутационное колебание земной оси с периодом около 18,6 года и амплитудой колебаний, не превосходящей 11'';
- прецессионное движение относительно оси эклиптики с периодом 25800 лет;
- движение вместе с солнечной системой относительно других звезд.
Все перечисленные составляющие движения Земли, кроме суточного вращения, в измерениях и расчетах не учитываются, так как их влияние чрезвычайно мало.
1.3.6. Земля - огромное сферическое тело с массой М = 5,975·1024 кг создает вокруг себя центральное гравитационное поле тяготения. Это поле притягивает к себе любые материальные тела, обладающие массой.
1.3.6.1. Гравитационное поле, создавая силу притяжения, вызывает ускоренное движение свободных материальных тел. Если тело неподвижно на земной поверхности, то возникает сила тяжести. Для тел, неподвижных относительно поверхности Земли, распределение силы тяжести в пространстве рассматривается как поле и характеризуется его потенциалом или геопотенциалом, характеризующим потенциальную энергию тел, расположенных в данной точке.
1.3.6.2. Потенциал поля тяжести зависит от гравитационного поля Земли и центростремительного ускорения, вызванного вращением Земли:
![]() (5)
(5)
При этом гравитационный потенциал

а кинетическая энергия вращения равна ![]()
где r - радиус-вектор;
G - универсальная гравитационная постоянная;
М - масса Земли;
ω - угловая скорость вращения Земли;
J, к - имперические константы.
Произведение гравитационной постоянной G на массу Земли М постоянно и для расчетов может быть принято равным 3,986004·1014 м3/с2.
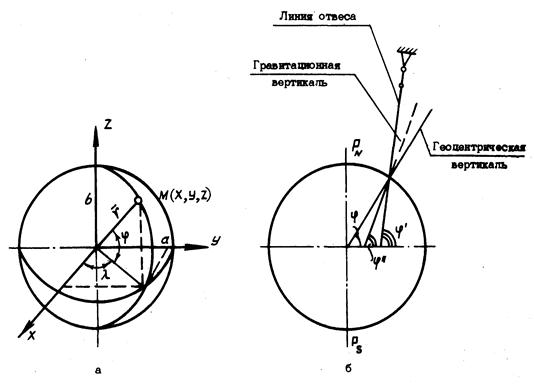
1.3.7. Как уже отмечалось, эквипотенциальная поверхность поля тяжести образует сфероид Земли. Направления действия сил тяжести, в том числе и отвеса, перпендикулярны эквипотенциальной поверхности поля тяжести, и указаны на черт. 2.
1.3.8. Ускорение силы тяжести имеет радиальную и горизонтальную составляющие, лежащие в плоскости меридиана, т.е.
 (6)
(6)
 (7)
(7)
1.3.9. Кроме основного гравитационного поля имеются гравитационные аномалии, вызванные неоднородным распределением плотности и масс (девиация масс) в земном геоде (горы, впадины). В ряде случаев в практике очень важно знать величину g применительно к той лаборатории, в которой проводятся работы. Этот вопрос может быть решен только путем непосредственного измерения величины gм в данном месте.
1 - радиус-вектор точки М; 2 - гравитационная вертикаль; 3 - нормаль к эллипсоиду Земли
Черт. 2
1.3.10. Для решения поставленных задач в качестве модели Земли можно принять сферу с равномерным распределением плотности, а гравитационное поле считается центральным, сила притяжения Земли характеризуется ускорением свободного падения. При этом условии зависимость ускорения свободного падения на среднем уровне моря от географической широты вычисляют по формуле
gj = 9,80616(1 - 0,0026373cos2j + 0,0000059cos22j). (8)
Ускорение свободного падения неподвижного тела на высоте определяют по формуле
![]() (9)
(9)
Стандартное значение ускорения свободного падения принято равным gc = 9,80665 м/с2.
ПРИЛОЖЕНИЕ 3
Рекомендуемое
МЕТОДИКА ИЗМЕРЕНИЯ УГЛА АТАКИ ЛЕТАТЕЛЬНОГО АППАРАТА
1. Задача измерения угла атаки ЛА
решается путем применения прямого метода с использованием измерительных
преобразователей флюгерного типа и путем применения косвенного Метода,
основанного на измерении угла тангажа ![]() и скоростного угла тангажа
и скоростного угла тангажа ![]() ЛА.
ЛА.
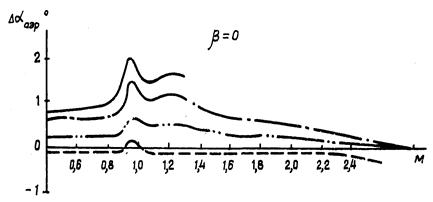
1.1. Особенностью работы преобразователей флюгерного типа является то, что на результаты их показаний оказывает значительнее влияние характер обтекания измерительной системы воздушным потоком. Наибольшее влияние обуславливается формированием скачков уплотнения на лопасти флюгеров при малых околозвуковых числах М и взаимодействия скачков уплотнения, образованных на лопасти флюгера, и элементов конструкции ЛА (носовой штанги) при больших околозвуковых и сверхзвуковых числах М. В качестве примера влияния условий обтекания измерительных преобразователей флюгерного типа, установленного на носовой штанге ЛА, может быть рассмотрен график, представленный на черт. 1.
![]() a = 22°
a = 22°
![]() a = 16°
a = 16°
![]() a = 8°
a = 8°
![]() a = 0°
a = 0°
Черт. 1
Как видно из графика, влияние обтекания на показания преобразователей флюгерного типа имеет прямую зависимость от угла атаки и числа М. Изменение показаний преобразователя флюгерного типа практически характеризуется линейной зависимостью от изменения числа М и учитывается путем введения в результаты измерений аэродинамической поправки.
1.1.1. Угол атаки определяется по формуле
a = aпр - Daаэр, (1)
где aпр - показания измерительного преобразователя флюгерного типа;
Daаэр - аэродинамическая поправка к преобразователю флюгерного типа, устанавливаемого на носовой штанге ЛА.
1.2. Косвенным способом угол атаки
измеряется как разность между углом тангажа ![]() и
скоростным углом тангажа
и
скоростным углом тангажа ![]() ,
т.е.
,
т.е.
a =![]() -
- ![]() . (2)
. (2)
1.2.1. Угол тангажа может измеряться с помощью гировертикали, предварительно откорректированной на режиме горизонтального полета. Способ измерения угла тангажа иллюстрирован на черт. 2.
Установочные углы:
|
- гировертикали D |
- акселерометра Daуст |
||
|
D |
D |
Daуст > 0 |
Daуст < 0 |
|
|
|
||
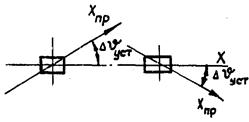
Черт. 2
Изменение угла тангажа определяется по формуле
![]()
Поправка ![]() рассчитывается по формуле
рассчитывается по формуле
![]()
где ![]() ,
, ![]() - поправки направлений гировертикали
соответственно за счет вращения и кривизны Земли;
- поправки направлений гировертикали
соответственно за счет вращения и кривизны Земли;
ψ - курс полета;
j - широта полета;
ω3 - угловая скорость вращения Земли;
r3 - радиус Земли;
DL, t - расстояние и время пролета от момента выключения коррекции.
1.2.2. Истинный угол тангажа:
![]() (3)
(3)
где ![]() - гировертикали;
- гировертикали;
![]() - установочный угол гировертикали относительно
средней аэродинамической хорды САХ (определяется при установке ПА в линию
горизонта);
- установочный угол гировертикали относительно
средней аэродинамической хорды САХ (определяется при установке ПА в линию
горизонта);
![]() - поправка к показаниям гировертикали, обусловленная
вращением и кривизной Земли.
- поправка к показаниям гировертикали, обусловленная
вращением и кривизной Земли.
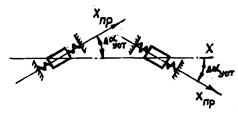
1.2.2.1. Введение поправки ![]() вызвано
тем, что в гировертикали совмещение оси OY с местной
вертикалью обеспечивается только при включенной коррекции в прямолинейном
установившемся горизонтальном полете. При выключении системы коррекции
гировертикаль сохраняет свое неизменное положение в пространстве. В полете с
момента выключения коррекции местная вертикаль будет отклоняться от оси OY гировертикали
на величину
вызвано
тем, что в гировертикали совмещение оси OY с местной
вертикалью обеспечивается только при включенной коррекции в прямолинейном
установившемся горизонтальном полете. При выключении системы коррекции
гировертикаль сохраняет свое неизменное положение в пространстве. В полете с
момента выключения коррекции местная вертикаль будет отклоняться от оси OY гировертикали
на величину ![]() за счет вращения и кривизны Земли.
за счет вращения и кривизны Земли.
Значение величины поправки за интервал времени Dt, прошедшего от момента выключения коррекции, определяется по формуле
![]() (4)
(4)
Обычно изменение широты невелико и им
можно пренебречь, тогда формула для вычисления ![]() будет иметь вид:
будет иметь вид:
![]() (5)
(5)
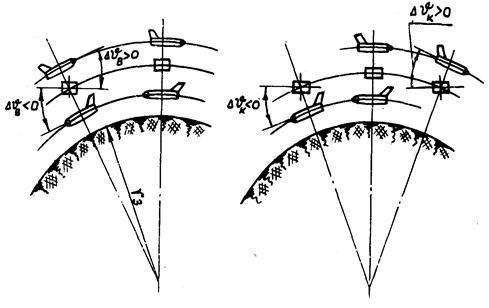
1.2.3. Для измерения скоростного угла
тангажа на участке прямолинейного полета, близкого к горизонтальному,
определяется начальное значение ![]() на основании измерения вертикальной
скорости Vg и воздушной скорости ЛА V. При
отсутствии специального преобразователя вертикальная скорость Vy может быть
получена на основании измеренных значений h и
вертикальной составляющей ускорения, перегрузки. В дальнейшем
на основании измерения вертикальной
скорости Vg и воздушной скорости ЛА V. При
отсутствии специального преобразователя вертикальная скорость Vy может быть
получена на основании измеренных значений h и
вертикальной составляющей ускорения, перегрузки. В дальнейшем ![]() определяется
как сумма начального значения
определяется
как сумма начального значения ![]() и приращения
и приращения ![]() , вычисленного
на основе измерения вертикальной составляющей ускорения и воздушной скорости
численным интегрированием с интервалом 0,5 с, т.е.
, вычисленного
на основе измерения вертикальной составляющей ускорения и воздушной скорости
численным интегрированием с интервалом 0,5 с, т.е.
![]() (6)
(6)
При условии, что ![]()
![]() (7)
(7)
где Dt = 0,5 с;
V и ![]() - скорость полета и скоростной угол
тангажа в начале интервала;
- скорость полета и скоростной угол
тангажа в начале интервала;
![]() - среднее значение вертикальной составляющей
перегрузки на интервале, рассчитанное по формуле
- среднее значение вертикальной составляющей
перегрузки на интервале, рассчитанное по формуле
![]() (8)
(8)
1.2.4. Определение ![]() представляет собой
типичную задачу, решаемую методом последовательных приближений.
представляет собой
типичную задачу, решаемую методом последовательных приближений.
Количество потребных приближений будет определяться заданной разницей Da значения угла атаки, полученного по результатам предыдущего и последующего приближений.
1.2.4.1. При измерении ![]() центра масс
ЛА в скоростной (воздушной) системе осей координат и при измерении
центра масс
ЛА в скоростной (воздушной) системе осей координат и при измерении ![]() и
и ![]() в связанной системе осей координат ЛА,
угол атаки можно было бы вычислить из уравнения
в связанной системе осей координат ЛА,
угол атаки можно было бы вычислить из уравнения
![]() (9)
(9)
При небольших углах атаки (a = 10°) при cosa = 1 и sina = a угол атаки определяется по формуле
 (10)
(10)
В качестве средства непосредственного
измерения ![]() может
быть использован акселерометр, смонтированный на флюгарке.
может
быть использован акселерометр, смонтированный на флюгарке.
ПРИЛОЖЕНИЕ 4
Справочное
СИСТЕМА ОСЕЙ КООРДИНАТ, ИХ ВЗАИМНОЕ ПОЛОЖЕНИЕ
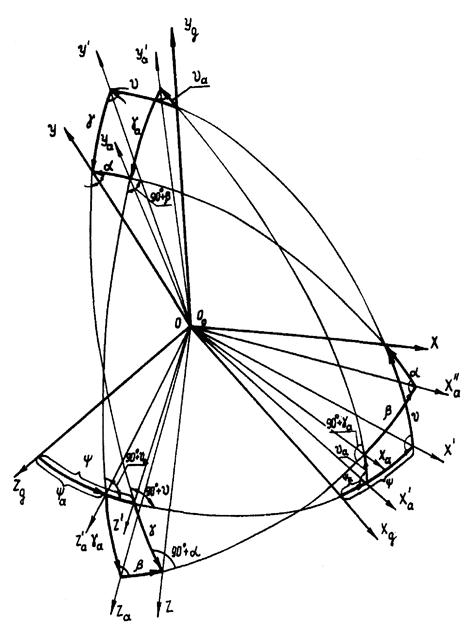
1. Для оценки исследования движения ЛА и оценки работы акселерометра применяются прямоугольные правые системы координат: связанная система осей координат ЛА, нормальная земная система осей координат, скоростная система осей координат, траекторная система осей координат и др. (ГОСТ 20058-80).
2. Пространственное положение систем осей координат характеризуется соответствующими углами поворота одной системы осей координат относительно другой (ГОСТ 20058-80).
2.1. Положение связанной системы осей
координат ЛА относительно нормальной земной системы осей координат определяется
тремя углами: углом тангажа ![]() , углом крена g, углом рыскания (углом курса) ψ.
, углом крена g, углом рыскания (углом курса) ψ.
2.2. Положение скоростной системы осей
координат относительно нормальной земной системы осей координат определяется
углами: скоростным углом тангажа ![]() , скоростным углом крена ga, скоростным углом рыскания (курса) ψа.
, скоростным углом крена ga, скоростным углом рыскания (курса) ψа.
2.3. Положение траекторной системы осей координат относительно нормальной земной системы координат характеризуется углом наклона траектории к горизонту θ и углом пути ψ.
2.4. Угол атаки a и угол скольжения b характеризуют положение скоростной системы осей координат относительно осей связанной системы координат ЛА.
Взаимное положение связанной и скоростной системы осей координат относительно нормальной земной системы осей координат и относительно друг друга показано на чертеже.
ПРИЛОЖЕНИЕ 5
Обязательное
РАСЧЕТ УСКОРЕНИЯ СВОБОДНОГО ПАДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА
1. Ускорение свободного падения ЛА в полете определяется из условий высоты полета h, скорости полета Vn, широты места j, направления полета ψ, скорости вращения Земли и гравитационного поля Земли и может быть выражено формулой
![]() (1)
(1)
2. Ускорение свободного падения тела ![]() , неподвижно
расположенного на высоте h в гравитационном поле вращающейся Земли, определяется
по формуле
, неподвижно
расположенного на высоте h в гравитационном поле вращающейся Земли, определяется
по формуле
 (2)
(2)
где j - широта, град;
h - высота;
ω - угловая скорость вращения Земли, равная 0,728·10-4 рад/с;
r3 - радиус Земли равный 6360·103 м;
![]() -
постоянный коэффициент, выбранный из условия аппроксимации принятого закона
изменения ускорения свободного падения с высотой и равный 9,8235 м/с2.
-
постоянный коэффициент, выбранный из условия аппроксимации принятого закона
изменения ускорения свободного падения с высотой и равный 9,8235 м/с2.
Первый член этой формулы описывает изменение гравитационной составляющей ускорения свободного падения в зависимости от высоты полета, а второй - изменение gL за счет вращения Земли.
3. При движении ЛА относительно Земли с путевой скоростью Vn в абсолютном движении будет происходить сложение путевой скорости с круговой скоростью Земли, что в свою очередь вызывает появление дополнительного ускорения
![]() (3)
(3)
4. Для условий полета, представленных на черт. 1 (определение ускорения свободного падения ЛА), формулу определения суммарного центробежного ускорения можно вывести, исходя из следующих условий:
- при полете с ψ = const меридиональная составляющая скорости ![]() , а широтная составляющая
скорости
, а широтная составляющая
скорости ![]()
- суммарная угловая скорость вращения в широтном и меридиональном направлении составят соответственно
![]() (4)
(4)
![]() (5)
(5)
- составляющие центробежного ускорения за счет составляющих суммарной скорости вращения в том и в другом направлениях будут равны
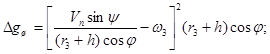 (6)
(6)
![]() (7)
(7)
- составляющая ускорения Dgg направлена по радиусу Земли, а Dgш - по перпендикуляру к оси ее вращения.
Спроектировав Vn на радиус,
сложив обе составляющие и имея в виду, ![]() после
некоторых преобразований получим выражение для суммарного центробежного
ускорения
после
некоторых преобразований получим выражение для суммарного центробежного
ускорения
![]() (8)
(8)
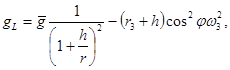
а далее - формулу для вычисления ускорения свободного падения ЛА, движущегося на данной высоте h, широте j, с постоянным ψ в гравитационном поле Земли, т.е.
 (9)
(9)
Сравнив полученное выражение с выражением для ускорения свободного падения неподвижного объекта, получим, что изменение ускорения свободного падения только за счет путевой скорости Vn и высоты полета h равно
![]() (10)
(10)
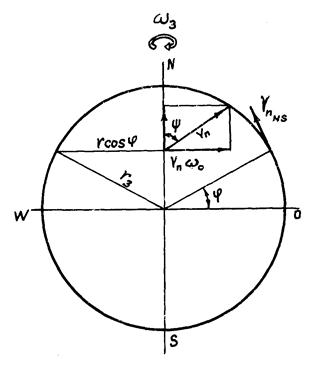
Черт. 1
На черт, 2, 3, 4 приведены графики, позволяющие оценить ускорение свободного падения и его составляющих для заданных условий полета от стандартного значения ускорения свободного падения, равного gc = 9,80665 м/с2.
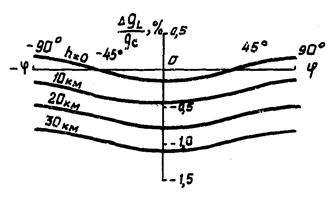
Черт. 2
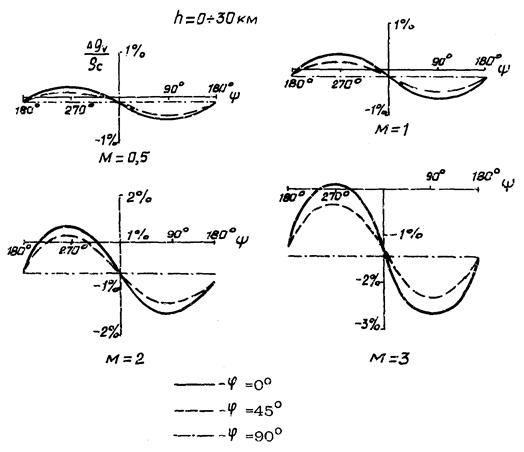
Черт. 3
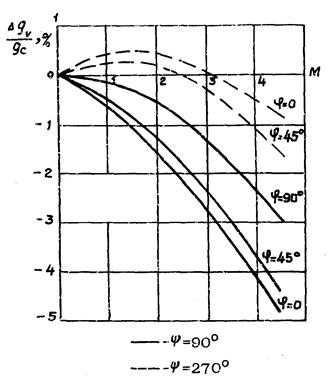
Черт. 4
Пользуясь приведенным материалом (см. черт. 1 - 4) ускорение свободного падения для заданных условий полета можно определить по формуле
![]() (11)
(11)
Пример. Значение ускорения свободного падения ЛА при полете на высоте h = 5 км, широте j = 45°, с курсом ψ = 90° и скоростью полета М = 0,5 в безветрие будет равно:
gла = 9,80665(1 + 0,025 - 0,035) = 9,80665 · 0,994 = 9,74781 м/с2,
т.е. уменьшение ускорения свободного падения ЛА от gc составит 0,6 %.
ПРИЛОЖЕНИЕ 6
Рекомендуемое
ТИПЫ И ОСНОВНЫЕ ХАРАКТЕРИСТИКИ ПОВЕРОЧНЫХ СРЕДСТВ
|
Наименование поверочного средства |
Тип поверочного средства |
Диапазон воспроизведения постоянного ускорения, м/с2 |
Диапазон воспроизведения ускорения (амплитуды) при гармоническом колебании, м/с2 |
Диапазон частот гармонического колебания, Гц |
Погрешность воспроизведения ускорения |
|
|
Среднее квадратическое отклонение результата S0 |
Неисключенная систематическая погрешность θ0 |
|||||
|
Установка с поворотным столом на базе оптической головки ОДГ-10 |
ПС-3 |
До 0,01 |
- |
- |
1·10-2 - 5·10-3 |
4·10-2 - 1,5·10-2 |
|
Св. 0,01 до 0,1 |
5·10-3 - 6·10-4 |
1,5·10-2 - 2,5·10-3 |
||||
|
" 0,1 до 1,0 |
6·10-4 - 1·10-4 |
2,5·10-3 - 3·10-4 |
||||
|
" 1,0 до 10 |
1·10-4 - 1·10-5 |
3·10-4 - 3·10-5 |
||||
|
Образцовая центрифуга |
Ц1-20О |
5 - 200 |
- |
- |
3·10-5 |
1·10-4 |
|
Низкочастотная вибрационная электродинамическая установка для вертикальных и горизонтальных гармонических колебаний |
ВЭДСН-008 |
- |
До 100 |
0,1 - 25 |
3·10-3 |
5·10-4 |
|
Образцовая центрифуга с двойным поворотным столом |
ДЦ-1 |
10 - 100 |
10 - 100 |
0,5 - 30 |
3·10-5* |
1·10-4* |
|
5 - 200 |
10 - 100 |
5·10-2** |
2,5·10-2 - 2·10-2** |
|||
|
Образцовая центрифуга с наклонным поворотным столом |
СГА-1 |
± 10 |
± 10 |
0,2 - 76 |
1·10-4* |
1·10-4* |
|
Центрифуга |
СЦП-800 |
До 8000 |
- |
- |
3·10-3 |
- |
|
Центрифуга с наклонным поворотным столом |
СТА-1-003 |
± 10 |
± 10 |
0,25 - 25 |
1·10-2* |
- |
|
Вибрационный механический стенд |
ВМС-35-2 |
- |
До 350 |
3,5 - 35 |
5·10-2 |
- |
|
* Для постоянной составляющей ускорения. ** Для гармонической составляющей ускорения при частоте колебаний 15 Гц. |
||||||
ПРИЛОЖЕНИЕ 7
Обязательное
Оформление протокола поверки акселерометровПРОТОКОЛ № ________ «____» ___________ 19 __ г. Поверка ________________________________, тип ____________________________ наименование преобразователя Заводской номер _________________________ Год выпуска ____________________ Пределы измерений ______________________________________________________ Основная погрешность, % _________________________________________________ Дополнительная погрешность при температуре ± 60 °С, % ________________________________________________ Дополнительная погрешность от других воздействующих факторов, % _____________________________________ Образцовые приборы: тип _____________________, № ________________, класс точности ______________ 1. Внешний осмотр _______________________________________________________ годен, негоден 2. Сопротивление изоляции ___________________________________________ МОм 3. Показатели образцового и поверяемого измерительных средств
4. Коэффициент градуировочной зависимости, случайная составляющая погрешности
5. Нестабильность градуировочной характеристики за период ___________________ ______________________________ составляет ________________________________ 6. Погрешность акселерометра от воздействующих факторов: - воздействия температуры в диапазоне _____________, °С составляет _________ %; - ___________________________________________________ составляет ________ % другие воздействующие факторы 7. Неравномерность амплитудно-частотной характеристики в диапазоне, Гц ________________________________________________________________________ 8. Коэффициент демпфирования ________________________________________________________________________ 9. Фазово-частотная характеристика ________________________________________________________________________ Прибор годен, забракован _________________________________________________ указать причину Подпись лица, выполнявшего поверку _______________________________________ инициалы, фамилия Подпись начальника приборно-измерительной лаборатории _____________________________________ инициалы, фамилия |
|||||||||||||||||||||||||||
СОДЕРЖАНИЕ