РОССИЙСКОЕ АКЦИОНЕРНОЕ ОБЩЕСТВО
ЭНЕРГЕТИКИ И ЭЛЕКТРИФИКАЦИИ "ЕЭС РОССИИ"
ДЕПАРТАМЕНТ СТРАТЕГИИ РАЗВИТИЯ И НАУЧНО-
ТЕХНИЧЕСКОЙ ПОЛИТИКИ
ТЕХНИЧЕСКИЕ ТРЕБОВАНИЯ
К ПОДСИСТЕМЕ ТЕХНОЛОГИЧЕСКИХ ЗАЩИТ,
ВЫПОЛНЕННЫХ НА БАЗЕ МИКРОПРОЦЕССОРНОЙ ТЕХНИКИ
РД 153-34.1-35.137-00
Вводится в действие с 01. 10.2000
Разработано Открытым акционерным обществом "Фирма по наладке, совершенствованию технологии и эксплуатации электростанций и сетей ОРГРЭС"
Исполнитель И.М. ЧУЧКИНА
Утверждено Департаментом стратегии развития и научно- технической политики РАО "ЕЭС России" 30.03.2000 г.
Первый заместитель начальника А.Л. БЕРСЕНЕВ
Введено впервые
Настоящие Технические требования разработаны по поручению Департамента стратегии развития и научно-технической политики РАО "ЕЭС России" с учетом замечаний научно-исследовательских и проектных институтов, энергопредприятий и являются собственностью РАО.
В настоящем документе сформулированы технические требования к микропроцессорным техническим средствам, реализующим подсистему технологических защит и защитных блокировок (ТЗ и ЗБ), а также рассмотрены варианты структурного построения подсистемы на этих средствах.
Учтен опыт эксплуатации российских и зарубежных технических средств, примененных в российской энергетике за последнее время.
Настоящие Технические требования должны приниматься за основу при разработке микропроцессорных устройств, предназначенных для реализации ТЗ и ЗБ, при проектировании АСУ ТП ТЭС для новых ТЭС, а также при полной или частичной модернизации действующих ТЭС. Импортируемые в Российскую Федерацию устройства, реализующие функцию ТЗ и ЗБ, должны удовлетворять требованиям данного документа.
В работе использованы материалы ВГПИ ТЭП (разд. 5.3.1 , 5.4 ) и ВТИ (разд. 5.5 , 5.6 , 5.8 , 5.9 ).
ОГЛАВЛЕНИЕ
1. ОБЩИЕ ПОЛОЖЕНИЯ
1.1. В настоящее время на многих ТЭС подсистемы ТЗ и ЗБ проектируются на средствах микропроцессорной техники. В данной работе сформулированы технические требования к микропроцессорным техническим средствам, которые могут быть использованы для реализации подсистемы ТЗ и ЗБ, а также рассмотрены варианты структуры АСУ ТП и место в ней подсистемы ТЗ и ЗБ в зависимости от технических средств, используемых для реализации всей АСУ ТП и подсистемы ТЗ и ЗБ в частности.
Настоящий документ должен приниматься за основу при разработке подсистем ТЗ и ЗБ в составе АСУ ТП ТЭС и при создании специальных микропроцессорных устройств, предназначенных для реализации ТЗ и ЗБ на ТЭС. Импортируемые в Российскую Федерацию устройства, реализующие функцию ТЗ и ЗБ, должны удовлетворять требованиям данного документа.
По мере накопления опыта проектирования и эксплуатации подсистем ТЗ и ЗБ, выполненных на микропроцессорной технике, настоящие Технические требования будут пересматриваться.
1.2. Технологические защиты и защитные блокировки являются одной из подсистем АСУ ТП (приложение 1) . Технологические защиты предназначены для защиты оперативного персонала и теплоэнергетического оборудования в случае возникновения аварийной или предаварийной ситуации путем экстренного автоматического перевода защищаемого оборудования в безопасное состояние. Защитные блокировки, как правило, запрещают выполнение операций на технологическом оборудовании, приводящих к возникновению аварийных ситуаций.
1.3. Подсистема ТЗ и ЗБ предназначена для решения следующих задач:
контроль появления признаков возникновения аварийных и предаварийных ситуаций: изменения аналоговых сигналов до заданных значений (уставок срабатывания), появление заданного состояния дискретных сигналов или их заданного сочетания;
контроль наличия условий срабатывания ТЗ или ЗБ: истечения заданной выдержки времени, наличия технологических признаков и/или оперативного разрешения на срабатывание;
формирование команды на выполнение соответствующей программы действия (определенного набора команд на исполнительные устройства ТЗ или ЗБ);
формирование информации о состоянии и срабатывании ТЗ, о результатах диагностики технических средств и при необходимости передача этой информации в другие подсистемы АСУ ТП: сигнализации, регистрации, управления;
прием информации из других подсистем АСУ ТП.
1.4. К подсистеме ТЗ и ЗБ как к наиболее ответственной подсистеме АСУ ТП предъявляются повышенные требования к: надежности - надежность подсистемы должна быть выше, чем надежность защищаемого оборудования, а при отработке аварийных ситуаций, в результате развития которых возможны человеческие жертвы (защиты группы А), подсистема должна обеспечить заданную безопасность персонала (см. разд. 5.9 );
живучести - одно событие не должно быть причиной выхода из строя нескольких резервирующих друг друга элементов или функций подсистемы (см. разд. 5.9 );
ремонтопригодности - предпочтительный способ восстановления работоспособности на уровне типового элемента замены на работающем оборудовании без отключения функции ТЗ или ЗБ; при отсутствии такой возможности минимизация длительности вывода ТЗ или ЗБ в ремонт (см. разд. 5.3.3 ).
1.5. Средства МПТ, используемые для реализации подсистемы ТЗ и ЗБ, должны быть серийно выпускаемыми, адаптированными к решению конкретных задач ТЗ и ЗБ, удовлетворяющими требованиям надежности, живучести и ремонтопригодности, предъявляемым к подсистеме ТЗ и ЗБ, а также совместимыми по каналам связи с остальными подсистемами АСУ ТП.
1.6. Применение микропроцессорных средств для реализации подсистемы ТЗ и ЗБ дает следующие преимущества по сравнению с традиционными средствами:
возможность непрерывного контроля достоверности всей или определенного класса входной информации с сигнализацией и регистрацией неисправности отдельных датчиков или каналов связи;
возможность реструктуризации алгоритмов при выявлении неисправности;
возможность контроля выполнения команд по факту и во времени;
самодиагностика технических средств с сигнализацией и регистрацией отказов на уровне типового элемента замены:
возможность санкционированного контроля состояния любого датчика или алгоритма;
упрощение процедуры внесения оперативных и неоперативных изменений при санкционированном доступе к таким изменениям с одновременной автоматической регистрацией факта доступа и внесенных изменений;
возможность фиксации времени возникновения всех регистрируемых событий;
автоматическая подготовка отчетной документации;
упрощение процедуры опробования защит;
более высокая ремонтопригодность технических средств;
значительное уменьшение габаритных размеров технических средств, реализующих подсистему ТЗ, при расширении выполняемых функций;
возможность полного резервирования технических средств при минимальном усложнении системы.
1.7. Недостатками применения микропроцессорной техники для реализации подсистемы ТЗ и ЗБ являются:
возможность генерации ложных сигналов внутри контроллера и необходимость принятия специальных мер по исключению негативных последствий этого;
возможные ограничения по быстродействию и необходимость подбора соответствующих технических средств и систем;
возможность "зависания" программы и необходимость перезапуска контроллера с сохранением текущей информации и команд;
необходимость при проектировании АСУ ТП конкретных объектов с применением распределенной системы ПТК одновременно разрабатывать детальную технологическую структуру всей АСУ ТП с учетом требований различных подсистем к надежности, быстродействию и т.д.
1.8. В настоящих Технических требованиях приняты следующие сокращения:
АВР - автоматическое включение резерва; АР - автоматическое регулирование;
АСУ ТП - автоматизированная система управления технологическим процессом;
АЦП - аналого-цифровой преобразователь;
ВПУ - валоповоротное устройство;
ГПЗ - главная паровая задвижка;
ДУ - дистанционное управление;
ЗБ - защитная блокировка;
ЗИП - запасные инструменты и приборы;
ИУ - исполнительное устройство;
МПТ - микропроцессорная техника;
МПУ ТЗ - микропроцессорное устройство, реализующее подсистему ТЗ и ЗБ;
ПТК - программно-технический комплекс;
ТГ - технологическая группа;
ТЗ - технологическая защита;
ТЭС - тепловая электростанция;
У СО - устройство связи с объектом;
ФГ - функциональная группа;
ФГУ - функциональное групповое управление;
ЦАСУ ТП - цех АСУ ТП на ТЭС .
2. СВЯЗИ ПОДСИСТЕМЫ ТЗ И ЗБ, ВЫПОЛНЕННОЙ НА МИКРОПРОЦЕССОРНЫХ ТЕХНИЧЕСКИХ СРЕДСТВАХ
Организация связей подсистемы ТЗ и ЗБ с другими подсистемами при выполнении ее на МПТ зависит в основном от того, на каких технических средствах выполнены остальные подсистемы АСУ ТП .
2.1. Варианты выполнения подсистемы ТЗ и ЗБ относительно других подсистем АСУ ТП
2.1.1 . Вся АСУ ТП выполнена как распределенная система на базе МПТ, надежность которой удовлетворяет требованиям, предъявляемым к ТЗ (см. разд. 5.9 ). Система организована по технологическому принципу, когда в одном или нескольких контроллерах решаются все задачи контроля и управления, включая ТЗ и ЗБ, для одной ТГ. Подсистема ТЗ и ЗБ оказывается рассредоточенной по разным контроллерам и разным шкафам по технологическому принципу (ТЗ котла - в контроллерах управлении котла, ТЗ турбины - в контроллерах управления турбины и т.д.).
В этом случае отсутствует индивидуальная аппаратурная реализация подсистемы ТЗ и ЗБ в отдельных конструктивах, что не позволяет предъявлять более высокие по сравнению с другими подсистемами требования к обслуживанию этой подсистемы (более жесткий критерий допуска, запрет внесения любых изменений и т.д.), но упрощает связи ТЗ и ЗБ с другими подсистемами АСУ ТП той же ТГ.
2.1.2. Вся АСУ ТП выполнена как распределенная система на базе МПТ. Система, за исключением подсистемы ТЗ и ЗБ, может быть организована по функциональному или технологическому принципу.
Подсистема ТЗ и ЗБ реализуется в отдельных контроллерах, которые образуют МПУ ТЗ.
Для блоков большой мощности с большим количеством ИУ возможна организация отдельных МПУ ТЗ для разных технологических участков (например, турбины, пароводяного тракта котла и т.д.).
Способ реализации подсистемы ТЗ и ЗБ в отдельном устройстве (МПУ ТЗ) зависит от надежности МПТ, на которой реализованы остальные подсистемы АСУ ТП.
2.1.2.1. Надежность МПТ, на которой реализована АСУ ТП, удовлетворяет требованиям, предъявляемым к ТЗ. МПУ ТЗ аппаратурно и программно выполняется аналогично другим подсистемам АСУ ТП.
2.1.2.2. Надежность МПТ, на которой реализована АСУ ТП, без принятия дополнительных мер не удовлетворяет требованиям, предъявляемым к ТЗ, однако МПТ позволяет путем проектной компоновки или программными средствами повысить показатели надежности отдельных специально выделяемых подсистем за счет их усложнения (увеличения кратности резервирования, повторного просчета результатов при формировании командных воздействий и т.д.).
2.1.2.3. Надежность МПТ, на которой реализована АСУ ТП, не удовлетворяет требованиям, предъявляемым к ТЗ. Подсистема ТЗ и ЗБ реализуется либо в специализированном устройстве, либо на базе контроллеров общего назначения, но более надежных, чем МПТ, используемая для остальных подсистем АСУ ТП. В любом случае МПТ, на которой реализуется МПУ ТЗ, и МПТ, на которой реализуются остальные подсистемы АСУ ТП, совместимы.
2.1.3. Другие подсистемы АСУ ТП выполнены либо на традиционных средствах, либо на МПТ, не имеющей цифровой связи с подсистемой ТЗ и ЗБ. Подсистема ТЗ и ЗБ выполняется на МПТ как отдельное специализированное устройство.
2.2. Связи внутри подсистемы ТЗ
Связи внутри подсистемы ТЗ (связь функции ТЗ и ЗБ, реализованной на МПТ, с датчиками, с рабочими местами операторов) могут быть реализованы по-разному при разных вариантах построения АСУ ТП. Способы организации этих связей рассмотрены ниже.
2.3. Связь функции ТЗ и ЗБ с датчиками
2.3.1. Датчиками подсистемы ТЗ и ЗБ, выполненной на базе МПТ, могут быть датчики дискретного сигнала (потенциального или типа "сухой контакт"), датчики аналогового нормированного сигнала (0-5 мА, 4-20 мА , 0-10 В), датчики натурального сигнала (термопар и термометров сопротивления).
2.3.2. При варианте построения АСУ ТП по п. 2.1.1 входная информация распределяется между контроллерами разных ТГ по технологическому принципу. Датчики являются общими для всех подсистем АСУ ТП данной ТГ, и обработанный сигнал по каждому параметру используется всеми потребителями, относящимися к данной ТГ, включая подсистему ТЗ и ЗБ.
2.3.3. При всех остальных вариантах выполнения АСУ ТП (п.п. 2.1.2 , 2.1.3 ) задачи сбора, обработки и диагностики входных сигналов для подсистемы ТЗ и ЗБ решаются в рамках этой подсистемы и реализуются в МПУ ТЗ.
Если сигнал датчика защит требуется использовать для других подсистем АСУ ТП, он может быть передан в них в цифровом или аналоговом виде только после обработки его в подсистеме ТЗ и ЗБ.
Ввод аналогового сигнала непосредственно от датчика, участвующего в подсистеме ТЗ и ЗБ, в контроллеры других подсистем не допускается.
При выполнении АСУ ТП согласно п. 2.1.2 для задачи автоматического ввода и вывода защит допускается использование сигналов, сформированных в других подсистемах АСУ ТП в виде логического сигнала и принятых в МПУ ТЗ по цифровой сети.
2.4. Связь функции ТЗ и ЗБ с операторскими станциями
2.4.1.При выполнении АСУ ТП по вариантам п. 2.1.1 или п. 2.1.2 связь с операторской и инженерной станциями осуществляется по цифровой сети.
2.4.2.При выполнении АСУ ТП по варианту п. 2.1.3 операторская и инженерная станции в объеме, необходимом для эксплуатации подсистемы ТЗ и ЗБ, входят в состав МПУ ТЗ как стационарные или переносные. Информация оператору-технологу от МПУ ТЗ представляется на традиционных средствах (табло) и передается согласно п. 2.5.5 .
2.5. Связи подсистемы ТЗ и ЗБ с другими подсистемами АСУ ТП
2.5.1. При варианте выполнения АСУ ТП по п. 2.1.1 связь между элементами подсистемы ТЗ и ЗБ, рассредоточенными по контроллерам разных ТГ, а также связь подсистемы ТЗ и ЗБ с другими подсистемами АСУ ТП, относящимися к другим ТГ, осуществляется по резервированным цифровым сетям или через УСО в зависимости от обеспечиваемых системой надежности и быстродействия. Именно эти характеристики являются критичными для данной структуры: при срабатывании ТЗ, относящейся к одной технологической группе, например к ТГ топливного тракта котла, выполняются алгоритмы останова или снижения нагрузки в других группах; ТГ пароводяного тракта, ТГ турбины и т.д., что требует быстрой и надежной передачи информации от одной ТГ к другой. (Требования к надежности см. разд. 5.9 , требования к быстродействию - разд. 5.4.3 ).
2.5.2. При варианте выполнения АСУ ТП по п. 2.1.2 связь с другими подсистемами может осуществляться по цифровым сетям или через УСО.
2.5.3. При варианте выполнения АСУ ТП по п. 2.1.3 связь с другими подсистемами осуществляется через УСО.
2.5.4. Предпочтительно выполнение связей между контроллерами, реализующими функцию ТЗ и ЗБ, по цифровой магистрали. Преимуществом этого способа связи является самодиагностик магистральных сетей с сигнализацией отказа. При применении кабельных связей необходимы дополнительные УСО для ввода-вывода сигналов, необходима разработка дополнительных алгоритмов диагностики связей.
2.5.5. Связь подсистемы ТЗ и ЗБ с подсистемами сигнализации и регистрации осуществляется по цифровой магистрали (варианты выполнения АСУ ТП по п.п. 2.1.1 , 2.1.2 ) или по кабельной связи (вариант выполнения АСУ ТП по п. 2.1.3 ). Информация на табло сигнализации, если они предусмотрены проектом, выдается "сухими" контактами дискретного модуля УСО МПУ ТЗ по кабельной связи.
Для МПУ ТЗ при выполнении АСУ ТП по п.п. 2.1.2.3 и 2.1.3 в рамках подсистемы ТЗ и ЗБ осуществляются сигнализация и регистрация фактов срабатывания ТЗ, появления неисправности, режимного ввода ТЗ, вывода в ремонт и т.д. (см. разд. 5.2.2 ).
2.6. Связь подсистемы ТЗ и ЗБ с исполнительными устройствами
2.6.1. Исполнительными устройствами подсистемы ТЗ и ЗБ независимо от ее аппаратурной реализации являются:
выключатели электродвигателей 6 кВ и 380 В;
запорная и регулирующая арматура с приводом 380/220 В;
быстрозапорная арматура с электромагнитным приводом (как правило, на напряжение постоянного тока), выполняющая защитную функцию - быстрого прерывания основных потоков энергоносителей, открытия аварийных сбросов и обводов и т.д.;
отдельные устройства ФГУ и АР.
2.6.2. Связь функции ТЗ и ЗБ с ИУ зависит от того, где организован узел приоритетов данного устройства, решающий, в частности, задачу запрета всех других командных воздействий на это устройство при поступлении на него команды от подсистемы ТЗ и ЗБ.
В узле приоритетов организуются команды на привод ИУ ("Открыть", "Закрыть" или "Включить", "Отключить"), поэтому, как правило, узел приоритетов реализуется в рамках подсистемы дистанционного управления, в виртуальном блоке управления ИУ.
Наибольшая надежность связи подсистемы ТЗ и ЗБ с ИУ обеспечивается при организации узла приоритетов в том же контроллере, где выполняются ТЗ, действующие на данное ИУ, однако это возможно не всегда.
2.6.3. Для варианта выполнения АСУ ТП по п. 2.1.1 алгоритмы ТЗ и алгоритмы управления всеми ИУ этой группы, а значит и узлы приоритетов реализуются в пределах одной ТГ и, следовательно, одного контроллера.
Если ТЗ действует на ИУ, узлы приоритетов которых реализованы в контроллерах других ТГ, ее команда должна передаваться в эти ТГ по межконтроллерной шине, одинарной или дублированной, и, возможно, параллельно через УСО.
2.6.4. Для остальных вариантов выполнения АСУ ТП требование организации узлов приоритетов всех ИУ ТЗ в составе МПУ ТЗ нереально из-за большого количества ИУ: при таком выполнении системы в МПУ ТЗ должно быть размещено все дистанционное и автоматическое управление этих ИУ.
В контроллерах ТЗ обязательно должны быть реализованы узлы приоритетов всей арматуры, имеющей электромагнитный привод на постоянном токе, и аварийных маслонасосов постоянного тока.
Необходимость выполнения узлов приоритетов других ИУ в составе МПУ ТЗ и их количество определяются при рабочем проектировании АСУ ТП таким образом, чтобы с учетом арматуры, имеющей электромагнитный привод, было выполнено требование отключения основных потоков энергоносителей. Количество этих ИУ должно быть минимальным и не превышать 2-4 шт.
2.6.5. Узлы приоритетов ИУ, не реализованные в МПУ ТЗ, выполняются в рамках подсистемы дистанционного управления, которая в свою очередь может быть выполнена на МПТ (варианты выполнения АСУ ТП по п.п. 2.1.1 , 2.1.2 ) или на традиционных средствах (вариант выполнения АСУ ТП по п. 2.1.3 ).
Комбинированный вариант схемы управления ИУ, когда логика управления реализуется на МПТ, а узел приоритетов - на промежуточном реле, не допускается, так как узел приоритетов не охватывается существующей системой непрерывной диагностики.
2.6.5.1. При выполнении узла приоритетов на МПТ в рамках подсистемы дистанционного управления команды ТЗ передаются в эту подсистему через цифровые сети, а для особо ответственных ИУ ( приложение 2 ) - могут дублироваться либо специальной резервной магистралью, либо кабельной связью с УСО МПУ ТЗ непосредственно на магнитный пускатель или другой усилитель, управляющий ИУ.
2.6.5.2. При выполнении узла приоритетов на традиционных средствах команды ТЗ передаются на узел приоритетов каждого устройства по кабелю с УСО МПУ ТЗ.
3. ВОПРОСЫ РЕЗЕРВИРОВАНИЯ ЭЛЕМЕНТОВ ПОДСИСТЕМЫ ТЗ И ЗБ
Необходимость и степень резервирования элементов подсистемы ТЗ и ЗБ определяется при ее разработке, исходя из требований к ее надежности и живучести (см. разд. 5.9 ). Тогда же определяется необходимость и объем задач автоматической реструктуризации при обнаружении отказа одного из резервирующих друг друга элементов.
В любом случае аварийная реструктуризация системы должна приводить к увеличению ее готовности даже за счет увеличения вероятности ложных срабатываний.
3.1. Резервирование датчиков
3.1.1. Микропроцессорная техника позволяет контролировать достоверность входного сигнала каждого датчика аналогового или дискретного сигнала и исправность линий связи с датчиком за счет непрерывной диагностики путем сравнения сигналов нескольких датчиков одного параметра и выявления неисправного канала.
Для сигналов, участвующих в подсистеме ТЗ и ЗБ, должен быть предусмотрен контроль возникновения максимально возможного количества неисправностей.
3.1.2. Надежное выявление неисправного датчика аналогового сигнала при неполном его отказе легко осуществляется при применении трех датчиков одного параметра и сравнении их сигналов. При обнаружении неисправного датчика его сигнал должен исключаться из дальнейшего рассмотрения путем реструктуризации алгоритмов обработки сигнала.
3.1.3. При использовании датчиков дискретного сигнала неисправность одного из них обнаруживается путем контроля наличия сигналов от разных датчиков одного параметра.
Оптимальная надежность дискретного сигнала при отказах любого типа обеспечивается при обработке сигнала по схеме "два из трех".
Исправность линии связи с датчиком может быть проконтролирована при установке параллельно контакту датчика высокого много сопротивления путем контроля сопротивления цепи: при срабатывании датчика сопротивление будет минимальным, при обрыве линии связи бесконечным.
Недостатком применения датчиков дискретного сигнала является ограниченная возможность сравнения их сигналов: только в момент срабатывания одного или нескольких из них, тогда как датчики аналогового сигнала по данному критерию диагностируются непрерывно.
3.1.4. Из вышеприведенного следует, что при выполнении подсистемы ТЗ и ЗБ на МПТ для контроля параметров предпочтение должно отдаваться резервирующим друг друга датчикам аналогового сигнала с диапазоном 4-20 мА. Для ТЗ, отключающих оборудование, должны применяться три датчика одного параметра, для других защит и блокировок возможно применение меньшего количества датчиков, вплоть до одного,
3.1.5. Электропитание разных датчиков одного параметра должно быть максимально независимым: разным кабелем, от разных модулей УСО или источников питания и т.д.
3.2. Организация обработки аналогового сигнала от датчиков
Применяются два алгоритма обработки аналоговых сигналов от датчиков подсистемы ТЗ. Сигнал после АЦП обрабатывается следующими двумя способами, различающимися последовательностью операций.
Первый способ:
диагностика исправности датчика и канала связи;
сравнение сигнала датчика с уставками и получение дискретного сигнала по каждой уставке;
формирование совместно с дискретными сигналами других датчиков того же параметра общего сигнала по каждой уставке (по схеме "один из двух", "два из двух", "два из трех");
Второй способ:
диагностика исправности датчика и канала связи;
диагностика датчика путем сравнения его сигнала с сигналами других датчиков того же параметра и организация общего сигнала как результата обработки сигналов этих датчиков;
сравнение общего сигнала с уставками и получение логических сигналов, передача значения параметра в другие подсистемы АСУ ТП.
Преимуществом второго способа является наличие одного значения параметра в системе, общее для всех подсистем. Время, необходимое для дополнительной по сравнению с первым способом обработки сигнала, не превышает одного цикла. Успешность пересылки сигнала в другие подсистемы определяется характеристиками выбранных цифровых магистралей.
В целях сохранения функции ТЗ при выходе из строя одного датчика при первом способе обработки сигнала изменяется алгоритм формирования сигнала для ТЗ, при втором - изменяется алгоритм формирования виртуального аналогового сигнала, имеющий больше вариантов изменения.
3.3. Резервирование контроллеров МПУ ТЗ
3.3.1. Для повышения надежности и живучести подсистемы ТЗ и ЗБ применяется резервирование контроллеров, входящих в МПУ ТЗ, с тем, чтобы при выходе из строя одного из них подсистема сохранила работоспособность.
Международными нормами (например, немецкими - DIN V VDE , американскими - ISA - s 84.01-1996) регламентируется применение для реализации подсистемы ТЗ и ЗБ ТЭС, сжигающих газ, не менее двух контроллеров, что повышает живучесть системы. На практике специализированные МПУ ТЗ инофирм выполняются с двумя (реже тремя) контроллерами при их 100%-ном резервировании.
Например, все защиты выполняются одинаково в каждом из двух одинаковых контроллеров. Выходные логические элементы контроллеров включаются по схеме "один из двух", что обеспечивает более высокую готовность системы, чем при схеме соединения контроллеров по схеме "два из двух". При этом в каждом из контроллеров приняты меры к снижению вероятности ложного срабатывания. Оба контроллера - рабочие. При выходе из строя одного из них исправный контроллер продолжает работать в течение заданного времени, достаточного для восстановления отказавшего контроллера (12 ч). Если по истечении этого времени второй контроллер не будет подключен, оставшийся в работе контроллер подаст команду на останов оборудования.
Возможен вариант, когда при 100%-ном резервировании один контроллер является рабочим, другой находится в горячем резерве.
При варианте с тремя контроллерами усложняется задача их синхронизации и появляется необходимость в специализированном узле мажоритирования выходных сигналов контроллеров, реализующем схему "два из трех". При выходе из строя одного контроллера система должна реструктурироваться для реализации схемы "один из двух".
3.3.2. Связь между резервирующими друг друга контроллерами осуществляется через цифровые сети (общие или специальные) таким образом, чтобы обеспечивались требуемые надежность и быстродействие подсистемы ТЗ и ЗБ.
3.3.3. Сигнал каждого датчика вводится одинаково во все резервирующие друг друга контроллеры, для чего выполняются устройства размножения каждого сигнала дискретного или аналогового датчика. Устройства размножения выполняются с учетом требований к подсистеме ТЗ и ЗБ и являются частью этой подсистемы.
Ввод сигналов резервирующих друг друга датчиков в разные контроллеры (со сравнением результатов вычислений по цифровым связям) применять не следует, так как рассогласование сигналов двух датчиков, допустимое с точки зрения их погрешности, существенно больше, чем недопустимое рассогласование процессоров из-за накопленной ошибки. Таким образом затрудняется самодиагностика МПУ ТЗ.
3.3.4. Способ формирования команды ТЗ или ЗБ на исполнительные устройства при резервировании контроллеров определяется, исходя из требований достаточной надежности подсистемы по отношению к отказам типа несрабатывание или ложное срабатывание. При этом предпочтение отдается структуре, обеспечивающей более высокую готовность, т.е. меньшую вероятность возникновения отказов типа несрабатывание, в результате которых возможны человеческие жертвы или необратимое разрушение оборудования и зданий.
Способ выдачи значений параметров, контролируемых датчиками ТЗ, в другие подсистемы от резервирующих друг друга контроллеров решается при разработке всей АСУ ТП.
Электропитание резервирующих друг друга контроллеров должно быть максимально независимым.
Алгоритмы ТЗ в резервирующих друг друга контроллерах выполняются таким образом, что все командные воздействия оперативного персонала передаются на них одновременно - одной командой.
Информация о состоянии ТЗ выводится из всех резервирующих друг друга контроллеров и формируется так же, как и команды ТЗ.
3.4. Резервирование МПУ ТЗ традиционными средствами
Опыт эксплуатации ТЗ, выполненных на базе МПТ, показывает, что при правильном выборе технических средств, надежной организации электропитания МПУ ТЗ дублирования его традиционными средствами не требуется. Полный отказ МПУ ТЗ должен приводить к останову теплоэнергетического оборудования: автоматическому, по команде, сформированной в МПУ ТЗ, или дистанционному.
Микропроцессорная техника имеет более высокую надежность по сравнению с традиционными средствами за счет ее постоянной самодиагностики. Кроме того, выполнение одной подсистемы на разных технических средствах создает сложности при объединении выходных команд на ИУ, что также может привести к снижению надежности всей системы, и затрудняет использование общих входных сигналов. Поэтому, если есть необходимость в дублировании всех или отдельных функций МПУ ТЗ, это должно быть выполнено на средствах МПТ.
4. ДОПОЛНИТЕЛЬНЫЕ ТРЕБОВАНИЯ К СОСТАВЛЕНИЮ ТЕХНИЧЕСКИХ УСЛОВИЙ НА ВЫПОЛНЕНИЕ ТЗ
Технические условия на выполнение ТЗ должны составляться на основании [ 1 - 4 ] с учетом следующих особенностей:
4.1. При выполнении ТЗ на МПТ увеличивается время их включенного состояния по сравнению с ТЗ, выполненными на традиционных средствах: подсистема включена в работу постоянно в течение всего времени функционирования ПТК АСУ ТП (для АСУ ТП, выполненных по вариантам п.п. 2.1.1 , 2.1.2 ) или в течение межремонтного периода защищаемого оборудования (для АСУ ТП, выполненных по вариантам п. 2.1.3 и разд. 2.3 ). Таким образом, ТЗ включены в работу при останове оборудования в резерв независимо от продолжительности простоя.
При выполнении ТЗ на традиционных средствах напряжение с технических средств ТЗ может быть снято при останове оборудования на срок более суток и подано при начале проведения пусковых работ.
Технические условия на выполнение ТЗ, включенные в [ 1 - 4 ], ориентированы на ТЗ, реализованные на традиционных средствах, с учетом того, что при подаче напряжения в схемы ТЗ часть параметров уже имеет нормальное значение (например, давление масла в системе смазки турбины, расход воды в обмотках генератора и т.д.).
При выполнении ТЗ на МПТ для ТЗ [ 1 - 3 ] по понижению параметров или отключению механизмов, не имевших автоматического ввода, необходимо дополнить технические требования на их выполнение условиями автоматического ввода или вывода при появлении определенных технологических признаков таким образом, чтобы при останове или пуске технологического оборудования не требовалось действий персонала по отключению или включению ТЗ.
При выполнении ТЗ на МПТ возникают новые требования к составлению технических условий на выполнение отдельных ТЗ и блокировок.
Из-за не одновременности подачи напряжения в схемы ТЗ и в схему управления ВПУ при реализации ТЗ на традиционных средствах потребовалось раздельное выполнение ТЗ по понижению давления масла в системе смазки турбины для турбины (блока) и для ВПУ. При выполнении ТЗ на МПТ эти ТЗ должны быть объединены: при понижении давления масла в системе смазки защита действует на останов турбины (блока), включение аварийного маслонасоса и отключение ВПУ.
Традиционно в [ 1 - 3 ] рассматриваются блокировки и АВР имеющие некоторые особенности и сложности при выполнении (например, АВР маслонасосов смазки турбины, АВР насосов регулирования турбины - из-за наличия, кроме насосов переменного тока, насосов постоянного тока; переключение дренажей турбины при изменении давления в отборах - из-за большого количества ИУ и взаимозависимости их состояний). При выполнении ТЗ на МПТ эти АВР и блокировки могут быть выполнены так же, как и другие АВР и блокировки, - вне подсистемы ТЗ, однако команды на включение насосов постоянного тока, являющихся механизмами защиты, должны формироваться в подсистеме ТЗ.
4.4. При реализации подсистемы ТЗ и ЗБ в отдельных контроллерах (МПУ ТЗ), кроме карты уставок, должен составляться документ, определяющий характеристики датчиков аналогового сигнала для их диагностики: максимально и минимально возможные эксплуатационные значения параметров, допустимое значение рассогласования сигналов датчиков одного параметра и т.д.
5. ТЕХНИЧЕСКИЕ ТРЕБОВАНИЯ К МПУ ТЗ
В данном разделе приведены технические требования к специализированному устройству МПУ ТЗ (см. варианты выполнения АСУ ТП по пп. 2.1.2 и 2.1.3 ). Разделы 5.2 , 5.3.1 , 5.4 - 5.9 относятся к любой МПТ, на которой реализуется подсистема ТЗ.
5.1. Наименование и область применения
Наименование: Микропроцессорное техническое устройство для реализации подсистемы технологических защит и защитных блокировок - МПУ ТЗ.
В МПУ ТЗ реализуются алгоритмы технологических защит, отключающих теплоэнергетическое оборудование, снижающих его нагрузку, выполняющих локальные операции, алгоритмы защитных блокировок согласно действующим в настоящее время Правилам взрывобезопасности, а также сигналы предупредительной сигнализации об изменении параметров, контролируемых ТЗ.
Алгоритмы АВР и блокировок, за исключением защитных, реализуются вне МПУ ТЗ.
Микропроцессорное устройство ТЗ является составной частью АСУ ТП. Связь МПУ ТЗ с остальными подсистемами АСУ ТП осуществляется в соответствии с требованиями, изложенными в разд. 2 настоящего документа.
Приоритет команд защиты над командами других систем управления (дистанционное управление, блокировки, авторегулирование, логические автоматы) организуется: в МПУ ТЗ для тех ИУ, управление которыми также реализуется в МПУ ТЗ, и вне МПУ ТЗ - для остальных ИУ.
5.2. Требования к функциям МПУ ТЗ
5.2.1. Управляющие функции
5.2.1.1. Микропроцессорное устройство ТЗ должно обеспечить реализацию алгоритмов технологических защит, действующих на останов и снижение нагрузки защищаемого оборудования, а также защит, выполняющих локальные операции на тепломеханическом оборудовании, и защитных блокировок в соответствии с [ 1 - 5 ].
5.2.1.2. Типовой перечень ТЗ для отдельных видов оборудования и их классификация приведены в приложении 3 . Для оценки объемов входных устройств связи с объектом в данном приложении приведено предпочтительное количество датчиков (дискретных и/или аналоговых)
для каждой защиты, включая формирование условий автоматического ввода.
5.2.1.3. При обработке входных сигналов для функции ТЗ и ЗБ в МПУ ТЗ должны решаться следующие задачи:
прием сигналов от датчиков, контролирующих технологические параметры, дискретных сигналов типа "сухой контакт" или потенциальных, аналоговых унифицированных сигналов, а также натуральных сигналов от термопар и термометров сопротивления;
логическая и динамическая обработка принятых аналоговых и дискретных сигналов согласно разд. 5.4.2 ;
диагностика достоверности каждого входного сигнала;
анализ работы резервированных каналов, выделение по каждому контролируемому параметру достоверного сигнала, который может использоваться не только в подсистеме ТЗ и ЗБ, но и в любых других подсистемах (при условии достоверной и своевременной передачи информации).
5.2.1.4. Для выполнения функций управления в МПУ ТЗ по каждой защите должны решаться следующие задачи:
формирование для аналоговых значений уставок срабатывания, заданных в единицах измерения параметра;
сравнение входных сигналов с уставкой срабатывания;
отсчет выдержек времени на срабатывание;
формирование команды на выполнение соответствующего алгоритма действия;
формирование длительных и импульсных выходных команд на исполнительные устройства;
автоматический режимный ввод и вывод защит, срабатывающих при понижении параметра или при отключении механизмов ( разд. 5 [ 1 - 3 ]);
обеспечение возможности санкционированного неоперативного вывода каждой защиты "на сигнал" (ремонтный вывод защиты) по команде с рабочего места оператора ЦАСУ ТП;
формирование информации для других подсистем АСУ ТП;
прием при необходимости логической информации от других подсистем АСУ ТП по цифровой магистрали.
5.2.1.5. Основные алгоритмы управляющих функций ТЗ, реализуемые МПУ ТЗ, приведены в приложении 4 .
5.2.2. Информационные функции
5.2.2.1. Микропроцессорное устройство ТЗ должно обеспечить выдачу оператору-технологу следующей информации:
а) при срабатывании ТЗ или ЗБ инициативно:
наименование защиты, с работавшей первой и всех сработавших защит:
наименование выполняемой программы;
б) по факту появления информации инициативно: наименование защит, у которых начался отсчет выдержки времени
(для защит, имеющих выдержку времени не менее 15 с);
расхождение сигналов дискретных или аналоговых датчиков одного параметра (с выдержкой времени до 1,5 с) при наличии только двух одинаковых датчиков этого параметра;
отказ датчика;
отказ канала связи, если предусмотрен алгоритм его диагностики;
повреждение МПУ ТЗ и факт его частичного или полного отключения;
автоматический режимный ввод или вывод ТЗ;
начало и окончание опробования ТЗ (при наличии программы автоматического опробования);
изменение состояния ремонтного вывода;
в) по санкционированному запросу:
состояние защит, требующих режимного ввода (введена - выведена);
состояние ремонтного вывода защит - перечень защит, выведенных "на сигнал";
результаты опробования ТЗ (при наличии программы автоматического опробования);
значение параметров настройки (уставок, выдержек времени).
5.2.2.2. На рабочем месте оперативного персонала ЦАСУ ТП, если оно оснащено соответствующими техническими средствами, должна представляться следующая информация от МПУ ТЗ:
а) при срабатывании ТЗ или ЗБ инициативно:
наименование всех сработавших защит с указанием времени срабатывания;
наименование выполняемой программы;
б) по факту появления информации инициативно;
расхождение сигналов дискретных или аналоговых датчиков одного параметра (с выдержкой времени до 1,5 с) при наличии только двух одинаковых датчиков этого параметра;
отказ датчика;
неисправность канала связи с датчиком или ИУ, если предусмотрены алгоритмы диагностики;
отказ любого диагностируемого элемента технических средств;
полное или частичное отключение МПУ ТЗ;
начало и окончание опробования ТЗ (при наличии программы автоматического опробования);
изменение состояния ремонтного вывода;
в) по санкционированному запросу (если МПУ ТЗ не имеет программы синхронизации контроллеров - отдельно для каждого из резервирующих друг друга каналов ТЗ):
состояние каждой ТЗ (введена - выведена, сработала, отключена ремонтным выводом);
результаты опробования ТЗ (при наличии программы автоматического опробования);
выдержка времени, реализованная для данной защиты;
уставка срабатывания, реализованная для данной защиты, в натуральных единицах измерения;
алгоритмы всех ТЗ;
вид повреждения МПУ ТЗ с указанием отказавшего модуля.
5.2.2.3. Инициативная информация при срабатывании ТЗ или ЗБ должна представляться персоналу в полном объеме независимо от того, какая информация была вызвана в этот момент на экраны дисплеев на рабочих местах оперативного персонала.
5.2.2.4. Объем информации в п.п. 5.2.2.1 и 5.2.2.2 указан для МПУТЗ, имеющего интерфейсную связь с АСУ ТП (выполнение АСУ ТП по п. 2.1.2 ).
Для МПУ ТЗ, не имеющего цифровой связи с АСУ ТП (выполнение АСУ ТП по п. 2.1.3 ), объем передаваемой информации может быть сокращен за счет полного или частичного исключения информации, выдаваемой оператору-технологу, и всей информации по п. 5.2.2.2 . Последняя в этом случае должна выводиться на переносное или стационарное устройство отображения информации МПУ ТЗ.
5.2.2.5. Микропроцессорное устройство ТЗ должно фиксировать в собственном архиве с выводом на печатающее устройство (выполнение АСУ ТП по п. 2.1.3 ) или передавать в подсистему регистрации и при необходимости в другие подсистемы (выполнение АСУ ТП по п. 2.1.2 )следующую информацию с указанием времени возникновения события:
срабатывание каждой защиты;
автоматический ввод и вывод ТЗ;
изменение состояния ремонтного вывода каждой ТЗ;
перевод МПУ ТЗ или отдельных защит в режим опробования, начало и окончание опробования, результаты опробования (при наличии программы автоматического опробования);
неисправность МПУ ТЗ;
частичное или полное отключение МПУ ТЗ;
неисправность датчика;
неисправность канала связи с датчиком или исполнительным устройством, если предусмотрены алгоритмы их диагностики.
5.2.2.6. Информация о невыполнении команд ТЗ за заданное время может быть получена в полном объеме только при выполнении всей АСУ ТП на МПТ.
Она формируется, например, в рамках технологической функции "Контроль действия защит", которая обычно реализуется вне МПУ ТЗ. Эта информация инициативно в темпе процесса выдается после срабатывания ТЗ на экран монитора оператора КТЦ.
При отсутствии в АСУ ТП технологической функции "Контроль действия защит" информация о невыполнении команды на ИУ может формироваться в рамках подсистемы дистанционного управления.
Информация о невыполнении команд ТЗ на особо ответственные ИУ может формироваться в МПУ ТЗ по договоренности между Заказчиком и разработчиком МПУ ТЗ.
5.2.2.7. Информация, относящаяся к подсистеме ТЗ и ЗБ, должна быть представлена в соответствии с [ 5 ] в:
оперативном журнале (срабатывание защит, изменение состояния ремонтного вывода, опробование ТЗ и ЗБ) - срок хранения 3 года, из них в памяти МПУ ТЗ - 3 мес., затем - на магнитном носителе;
журнале дефектов и неполадок оборудования (неисправности и повреждения МПУ ТЗ, каналов связи, датчиков, исполнительных устройств) срок хранения 3 года, из них в памяти МПУ ТЗ. - 6 мес., затем - на магнитном носителе;
протоколах срабатывания защит, опробования защит, защит, выведенных ремонтным выводом, - срок хранения 3 года, из них в памяти МПУ ТЗ - 3 мес., затем - на магнитном носителе;
карте уставок ТЗ и ЗБ - срок хранения не ограничен.
5.2.2.8. Хранение информации по п.п. 5.2.2.5 - 5.2.2.7 должно быть обеспечено в течение заданного времени при возможных перерывах электропитания МПУ ТЗ длительностью до 3 сут произвольное число раз.
5.2.2.9. Должна быть предусмотрена защита зарегистрированной информации от изменения и корректировок со стороны оперативного или ремонтного персонала ТЭС.
5.2.3. Сервисные функции
5.2.3.1. Микропроцессорное устройство ТЗ должно обеспечивать: автоматическую постоянную самодиагностику с точностью до элемента замены;
постоянную диагностику исправности каналов контроля с аналоговыми и дискретными датчиками, включая линии связи, если это предусмотрено проектом;
контроль достоверности входных сигналов;
возможность периодической проверки МПУ ТЗ как средства измерения;
постоянную диагностику исправности выходных каналов ТЗ до ИУ полностью или частично;
автоматическое устранение максимально возможного количества выявленных отказов путем реструктурирования системы в месте отказа, подключения резервных элементов, наложения запрета на формирование ошибочных команд либо путем частичного или полного отключения МПУ ТЗ с возможностью формирования команды на останов оборудования (решение о необходимости отключения оборудования при отказах МПУ ТЗ принимается при разработке конкретной подсистемы ТЗ и ЗБ);
формирование сигнала о возникновении повреждения или отказа с расшифровкой этого сообщения с точностью до элемента замены;
реализацию режима комплексного и индивидуального опробования ТЗ на остановленном оборудовании с контролем результатов опробования;
защиту от несанкционированного доступа к МПУ ТЗ.
5.2.3.2. Микропроцессорное устройство ТЗ должно предоставлять возможность по санкционированному допуску выполнять следующие операции:
а) с санкции главного инженера ТЭС: изменение алгоритмов ТЗ;
изменение уставок срабатывания и выдержек времени защит; изменение состояния устройства ремонтного вывода;
б) с санкции начальника смены:
проведение функционального опробования ТЗ и ЗБ на действующем и остановленном оборудовании.
Все указанные операции выполняются с рабочего места оператора ЦАСУ ТП или с сервисного пульта. Операции регистрируются, а внесенные изменения распечатываются в специальном протоколе.
5.2.3.3. В состав МПУ ТЗ при вариантах структуры АСУ ТП по пп. 2.1.2.3 и 2.1.3 должен входить переносный или стационарный сервисный пульт с необходимым терминалом для корректировки программ, наладки и эксплуатации МПУ ТЗ.
5.3. Требования к эксплуатации, техническому обслуживанию и ремонту МПУТЗ
5.3.1. Условия эксплуатации
5.3.1.1. Климатическое исполнение устройств - не хуже О, категория размещения - не хуже 4,2 по [ 6 ], при этом:
рабочая температура окружающего воздуха 10-45°С; предельная температура окружающего воздуха 3-50°С; относительная влажность воздуха; среднегодовая - 70% при 27°С, верхнее значение - 98% при 35°С;
барометрическое давление 600-800 мм рт. ст.; воздействие плесневых грибков отсутствует; среда пожаровзрывобезопасная.
5.3.1.2 Условия эксплуатации в части воздействия механических факторов внешней среды должны быть не ниже группы условий эксплуатации М13 по [ 7 ], при этом:
ускорение вибрационных нагрузок не более 0,12 g в диапазоне частот 0,5-100 Гц;
сейсмические воздействия землетрясения силой не более 7 баллов по [ MSK -64] на отметке по высоте не более 17,4 м.
5.3.1.3. Микропроцессорное устройство ТЗ должно быть стойким к воздействию агрессивных сред по группам 1-3, 4а [ 8 ]. При этом должно предусматриваться максимально возможное применение негорючих и не поддерживающих горение материалов.
5.3.2. Электроснабжение
5.3.2.1. Источниками электроснабжения МПУ ТЗ должны быть:
основной - через АВР от двух независимых вводов сети переменного тока напряжением 380/220 В с максимально допустимыми колебаниями +10, -15% номинального и частотой 50±1 Гц;
резервный - либо путем инвертирования через АВР от двух независимых вводов постоянного тока (например, напряжением 220 В с максимально допустимыми колебаниями +10, -20% номинального), либо от специальных для ПТК аккумуляторных батарей (способ резервирования уточняется при разработке технического задания на выполнение ТЗ конкретного оборудования).
При выполнении АСУ ТП согласно п. 2.1.2 электропитание остальных подсистем АСУ ТП, как правило, должно быть организовано от тех же источников.
Работоспособность устройств должна обеспечиваться при наличии напряжения указанного качества хотя бы на одном из вводов, а также при кратковременных до 5 с отклонениях напряжения питания в пределах +15, -30% и частоты до ±5 Гц.
При АВР питающего напряжения с потерей напряжения на время не менее 0,5 с не должно возникать ложных срабатываний защити потери информации в памяти МПУ ТЗ.
При исчезновении электропитания на время более 0,5 с МПУ ТЗ, не имеющее задания на сохранение работоспособности в этих условиях, должно отключиться с выдачей сигнала об отключении. При этом должна быть предусмотрена возможность выдачи команды на останов оборудования, если такое требование включено в конкретное техническое задание.
Повторное включение МПУ ТЗ должно быть санкционированным. При появлении питающего напряжения после перерыва любой длительности не должна требоваться перезагрузка программы и не должны формироваться ложные выходные команды контроллера.
5.3.2.5. Каждый шкаф (стойка) МПУ ТЗ должен иметь не менее двух внутренних источников питания, резервирующих друг друга.
5.3.2.6. Должен быть обеспечен постоянный автоматический контроль за состоянием источников питания МПУ ТЗ по следующим параметрам:
понижение или повышение уровня напряжения на выходе каждого источника до установленного значения;
понижение уровня изоляции между изолированным от "земли" полюсом сети от источников питания и "землей".
5.3.3. Условия технического обслуживания и ремонта
5.3.3.1. Эксплуатация МПУ ТЗ организуется в соответствии с [ 9 , 10 ].
5.3.3.2. Плановое ТО МПУ ТЗ (проведение тестовых проверок с целью обнаружения скрытых, не индицируемых системой самодиагностики отказов, замена отдельных элементов и т.п.) во время нормальной эксплуатации технологического оборудования должно выполняться без полного отключения МПУ ТЗ. Кратковременное отключение одного из двух контроллеров допускается.
5.3.3.3. Неплановые работы по восстановлению работоспособности МПУ ТЗ при возникновении отказов технических и программных средств должны осуществляться путем замены модулей из состава ЗИП без дополнительной регулировки.
Неплановые работы могут осуществляться в одну смену.
Среднее время поиска и устранения любой неисправности МПУ ТЗ, включая перезагрузку программного обеспечения (когда это требуется), должно быть не более 2 ч.
Необходимость останова теплоэнергетического оборудования при частичных отказах МПУ ТЗ зависит от типа отказа (сообщается разработчиком) и определяется для конкретного типа МПУ ТЗ при разработке технического задания на выполнение защит конкретного оборудования.
5.3.3.4. В состав поставки технических средств должны входить необходимые для проведения ТО сервисные устройства, установки, стенды. МПУ ТЗ обеспечивается комплектом ЗИП, исходя из 90%-нойгарантии годовой эксплуатационной потребности. Состав ЗИП и сервисных устройств разрабатывается и согласовывается на этапе разработки рабочей документации с учетом требований п.п. 5.2.3.3 и 5.8.7 .
5.3.3.5. Объем, методика и периодичность проверки МПУ ТЗ должны быть указаны в технической документации изготовителя.
Нормы и методика технического обслуживания ТЗ, выполненных на МПУ ТЗ, разрабатываются после накопления статистических данных и могут быть различны для разных типов МПУ ТЗ.
5.4. Требования к техническому обеспечению
5.4.1. Входы-выходы МПУ ТЗ
5.4.1.1. Число входов-выходов контроллера определяется объемом его функций по п. 5.2.1.1 с запасом не менее 15%.
5.4.1.2. Микропроцессорные устройства ТЗ должны принимать следующие входные сигналы:
дискретный замыкающий типа сухой контакт, рассчитанный на
напряжение постоянного тока 220 В ![]() при токе не менее 5 мА;
при токе не менее 5 мА;
дискретный замыкающий типа сухой контакт, рассчитанный на напряжение постоянного тока 24 В ±5% при токе не менее 10 мА;
дискретный потенциальный сигнал напряжения постоянного тока 24 В ±5% при токе не менее 10 мА с гальваническим разделением цепей;
аналоговый унифицированный токовый сигнал 0-5 мА; 0-20 мА; 4-20 мА; 0-10 В;
аналоговый натуральный сигнал термопар и термометров сопротивления стандартных градуировок [ 11 , 12 ].
5.4.1.3. Входы, рассчитанные на прием аналоговых сигналов, в течение неопределенно длительного времени должны выдерживать без повреждения перегрузку, равную 150% верхнего значения диапазона изменения входного сигнала любой полярности.
5.4.1.4. Входное сопротивление УСО для унифицированного токового сигнала должно быть не более:
500 Ом для тока 0-5мА;
200 Ом для тока 0-20 (4-20) мА.
5.4.1.5. Микропроцессорное устройство ТЗ должно выдавать следующие управляющие сигналы типов:
сухой контакт, рассчитанный на напряжение 220 В переменного тока при мощности 100 В Аи cos j 0,8, нагрузка индуктивная (для управления пускателями);
сухой контакт, рассчитанный на напряжение постоянного тока 220 В при токе 2 А (для управления электромагнитом);
сухой контакт, рассчитанный на напряжение постоянного тока до 110 В при токе до 0,3 А (для управления табло сигнализации ТСС);
сухой контакт, рассчитанный на напряжение 24 В постоянного тока при токе 10 мА;
сухой контакт, рассчитанный на напряжение 24 В постоянного тока при токе до 300 мА.
5.4.1.6. Все электрические цепи входных устройств должны иметь гальваническое разделение между собой, должны быть отделены от выходных цепей и "земли". Рабочее напряжение гальванической развязки должно быть не менее:
100 В для аналоговых сигналов;
500 В для дискретных сигналов 24 В;
1000 В для дискретных сигналов 220 В.
Для дискретных сигналов допустима групповая гальваническая развязка, для дискретных потенциальных сигналов количеством сигналов в группе должно быть не более 8.
5.4.1.7. При формировании управляющих сигналов в МПУ ТЗ по п. 5.4.1.5 все электрические цепи выходных устройств должны иметь гальваническое разделение между собой, а также должны быть отделены от входных цепей и "земли". Рабочее напряжение гальванической развязки должно быть не менее 1000 В.
5.4.1.8. Должна быть предусмотрена возможность обмена информацией между МПУ ТЗ и другими подсистемами АСУ ТП, выполненной по п. 2.1.2 по магистральной цифровой связи с обеспечением условий разд. 5.4.3 и 5.9 .
5.4.2. Обработка сигналов датчиков ТЗ и ЗБ
5.4.2.1. Предварительная обработка аналоговых сигналов от датчиков ТЗ должна предусматривать решение следующих задач:
контроль достоверности сигнала каждого датчика;
контроль исправности линий связи с датчиками;
логическая и динамическая обработка дискретных и аналоговых сигналов (демпфирование, линеаризация, масштабирование на основе стандартных градуировочных характеристик датчиков и т.д.);
формирование достоверного сигнала по каждому контролируемому параметру с возможностью реструктуризации алгоритма обработки при обнаружении отказов;
сигнализация обнаруженных отказов.
5.4.2.2. Дальнейшая обработка входных сигналов в МПУ ТЗ должна предусматривать возможность сравнения значения входного сигнала не менее чем с четырьмя уставками срабатывания.
5.4.2.3. Пороговый элемент должен иметь возможность срабатывания по одному из двух вариантов: при превышении входным сигналом уставки срабатывания или при уменьшении входного сигнала ниже уставки срабатывания.
5.4.2.4. Номинальный диапазон уставок срабатывания по аналоговому входу должен составлять 6-95% диапазона измерений входного модуля УСО.
5.4.2.5. Номинальный диапазон зоны возврата по аналоговому входу должен составлять 2-4% диапазона измерений входного модуля УСО.
5.4.2.6. Номинальный диапазон уставок времени срабатывания - 0- 600 с.
5.4.2.7. Номинальный диапазон уставок рассогласования аналоговых сигналов одного параметра должен составлять 0-20%диапазона измерений входного модуля УСО.
5.4.2.8. Номинальный диапазон уставок постоянной времени демпфирования аналоговых сигналов должен составлять 0,2-20 с.
5.4.2.9. Основная приведенная погрешность срабатывания выходных усилителей (относительно уставок) по уровню параметра не должна превышать:
0,2% для защит, использующих нормализованный токовый входной сигнал;
0,4% для защит, использующих натуральный сигнал термопар и термометров сопротивления.
5.4.2.10. Основная приведенная погрешность установки зоны возврата не должна превышать 10%.
5.4.2.11. Основная относительная погрешность установки выдержки времени не должна превышать 10%.
5.4.2.12. Основная приведенная погрешность уставки рассогласования аналоговых параметров не должна превышать 5%.
5.4.2.13. Основная относительная погрешность установки постоянной времени демпфирования не должна превышать 10%.
5.4.2.14. Дополнительные погрешности метрологических показателей должны устанавливаться таким образом, чтобы суммарная эксплуатационная погрешность не превышала удвоенной основной погрешности параметра.
5.4.3. Требования к быстродействию
5.4.3.1. Нормируются следующие показатели:
время, необходимое для формирования воздействия на исполнительные устройства;
время, необходимое для представления оперативной информации.
5.4.3.2.Команды на исполнительные устройства, управляемые из МПУ ТЗ, должны быть сформированы не позже чем через 0,1 с после обнаружения признака аварийной ситуации (для ТЗ, не имеющих выдержки времени), а на исполнительные устройства, управляемые из других контроллеров, - не позже чем через 0,2 с.
5.4.3.3.Информация, указанная в п . 5.2.2.1 , должна поступать на экран оператора-технолога, а информация, указанная в п. 5.2.2.2 , - на экран оперативного персонала АСУ ТП не позже чем через 0,5 с после обнаружения соответствующей ситуации.
5.4.4. Конструктивные требования
5.4.4.1. Микропроцессорное устройство ТЗ должно размещаться в унифицированных конструкциях - напольных шкафах. Степень защиты - не хуже IP 20 по [ 13 ].
5.4.4.2. При необходимости установки электромагнитных реле, формирующих команды ТЗ на ИУ, они компонуются в специальные модули, которые для выполнения требования помехозащищенности могут устанавливаться в отдельном шкафу (шкафах).
5.4.4.3. Отдельные конструктивно законченные элементы МПУ ТЗ, в том числе контроллеры, входные и выходные УСО, должны допускать возможность разной степени их взаиморезервирования. Выбор вариантов резервирования должен осуществляться при разработке МПУ ТЗ или конкретной подсистемы ТЗ и ЗБ.
5.4.4.4. Конструкция модулей УСО МПУ ТЗ, рассчитанных на подключение унифицированных сигналов, должна обеспечивать безразрывность каждой из токовых цепей при устранении отказов УСО или МПУ ТЗ.
5.4.4.5. Предпочтительно двустороннее обслуживание шкафов. Шкафы должны быть снабжены запирающимися дверями и сигнализацией их открытия. Запоры должны иметь возможность пломбирования.
5.4.4.6. Подвод кабелей к шкафам, как правило, снизу. При необходимости по специальному заказу должна быть предусмотрена модификация шкафов с верхним подводом кабелей. Для внешних электрических соединений должны быть применены стандартные соединители и выводы.
5.4.4.7. Шкафы должны иметь болт для подключения защитного заземления к общему контуру заземления согласно [ 14 ]. Электрическое сопротивление, измеренное между болтом и любой металлической частью шкафа, подлежащей заземлению, не должно превышать 0,1 Ом.
5.4.5. Требования к электрической изоляции
Требования к сопротивлению изоляции и к электрической прочности изоляции электрических цепей изложены в [ 15 ] с учетом п. 5.4.1.6 .
5.5. Требования к защите от влияния внешних воздействий
5.5.1. Микропроцессорное устройство ТЗ должно быть устойчиво к воздействию магнитных полей постоянного и переменного тока промышленной частоты любого направления напряженностью до 30А/м согласно [ 16 ], а также электрических полей переменного тока напряженностью до 10 кВ/м.
5.5.2. Микропроцессорное устройство ТЗ должно быть устойчиво к воздействию электрических помех промышленной частоты, действующих на аналоговые входы с амплитудой до 100 мВ любой фазы.
5.5.3. Микропроцессорное устройство ТЗ должно быть устойчиво к воздействию импульсных электрических помех общего типа, действующих на:
дискретные (24 В) входы с амплитудой до 5 В любой длительности или амплитудой до 1,5 кВ при длительности переднего фронта 1,2 мкс и постоянной времени заднего фронта 50 мкс;
аналоговые входы с амплитудой до 100 В и длительностью до 1 мкс.
5.5.4. Микропроцессорное устройство ТЗ должно быть устойчиво к электростатическим разрядам согласно [ 17 ].
5.5.5. Микропроцессорное устройство ТЗ должно быть устойчиво к наносекундным импульсным помехам согласно [ 18 ].
5.5.6. Микропроцессорное устройство ТЗ должно быть устойчиво к радиоэлектронным помехам согласно [ 19 , 20 , 21 ].
5.5.7. Микропроцессорное устройство ТЗ должно быть устойчиво к помехам от радиотелефонов и современных переговорных устройств.
5.5.8. Требования по п.п. 5.5.1 - 5.5.7 должны выполняться при использовании кабелей, имеющих общий экран, а не экранированные жилы.
5.5.9. Микропроцессорное устройство ТЗ не должно создавать помех, уровень которых превышает указания п.п. 5.5.1 - 5.5.6 .
5.5.10. Разработчик МПУ ТЗ должен сформулировать четкие требования к установке его микропроцессорных устройств и прокладке линий связи: экранирование помещений, требования к кабелям, заземление и зануление кабелей, цепей и аппаратуры, допустимые расстояния от источников помех в условиях ТЭС и т.д.
5.6. Требования к программному обеспечению
5.6.1. Программное обеспечение, входящее в состав МПУ ТЗ, должно отвечать требованиям [ 22 , 23 ].
5.6.2. Системное программное обеспечение должно поставляться заводом-изготовителем комплектно с МПУ ТЗ. Должны предусматриваться меры, не допускающие внесения в него изменений без участия представителей завода-изготовителя МПУ ТЗ.
Прикладное программное обеспечение готовится разработчиком АСУ ТП. Допускается изменение и корректировка прикладного программного обеспечения в заранее оговоренных при проектировании пределах наладчиками и персоналом ЦАСУ ТП по санкционированному допуску после согласования с разработчиком АСУ ТП.
5.6.3. Все программное обеспечение должно сопровождаться исчерпывающей эксплуатационной документацией согласно системе стандартов ЕСПД (группа 19) [ 24 ].
Должно быть обеспечено сопровождение программного обеспечения со стороны разработчиков с обязательным доведением до каждого пользователя принципиальных изменений, внесенных в программы в процессе эксплуатации программных средств разными потребителями.
5.6.4. Программное обеспечение должно содержать библиотек у типовых алгоритмов реализации функций защит, предназначенных для выполнения конкретных проектов АСУ ТП путем редактирования этих алгоритмов пользователем.
5.6.5. Программное обеспечение должно охватывать все функции управления и формирования информации, изложенные в разд. 5.2
настоящего документа.
5.6.6. Должна быть обеспечена возможность подготовки или изменения пользовательских программ в заранее оговоренном объеме не посредственно на энергопредприятии без обязательного привлечения разработчиков или профессиональных программистов.
5.6.7. Оперативное изменение пользовательских программ (изменение значений уставок, выдержек времени, положения ремонтного вывода) во всех резервирующих друг друга контроллерах МПУ ТЗ должно выполняться по одной команде.
5.6.8. В МПУ ТЗ должна быть реализована защита от ложного срабатывания или несрабатывания ТЗ при зависании программы и предусмотрен автоматический перезапуск МПУ ТЗ, обеспечивающий отсутствие при этом любых отказов ТЗ.
5.6.9. Программное обеспечение МПУ ТЗ должно обеспечивать безотказное функционирование комплекса технических средств и удовлетворять требованиям к пятому (нормальному) уровню безопасности программного обеспечения согласно [ 25 ].
5.7. Требования к лингвистическому обеспечению
5.7.1. Лингвистическое обеспечение должно быть рассчитано на пользователей-специалистов в области автоматизации ТЭС, не владеющих универсальными языками программирования: проектировщиков АСУ ТП, наладочный и эксплуатационный персонал.
5.7.2. Для представления информации должны использоваться общепринятые в отрасли символы, сокращения терминов, условные обозначения.
5.7.3. Для описания конфигурации системы и типовых задач должны широко использоваться стандартные бланки (формы), разработанными создателями МПУ ТЗ и заполняемые пользователем.
5.7.4. Принципы программирования должны позволять структурировать проектные решения, обеспечивать простоту отладки введенных программ и внесения в них необходимых изменений. Язык должен базироваться на понятии алгоблоков, которые в процессе программирования заполняются библиотечными алгоритмами. Должна быть обеспечена возможность передачи выходного сигнала любого алгоблока на любой выход контроллера и любой вход другого алгоблока.
5.7.5. Лингвистическое обеспечение для МПУ ТЗ в составе АСУТП, выполненной согласно п. 2.1.2 , должно быть общим для всей АСУТП.
5.8. Требования к характеристикам точности
5.8.1. Объектами, для которых устанавливаются характеристики точности, являются:
аналого-цифровые преобразователи, предназначенные для прямого измерения аналоговых параметров в составе УСО; аналоговые каналы МПУ ТЗ.
5.8.2. Номенклатура нормируемых точностных характеристик АЦП должна включать в себя следующие показатели:
разрядность аналого-цифрового преобразования; основная погрешность измерения;
дополнительные погрешности от влияния внешних воздействующих факторов.
5.8.3. Номенклатура нормируемых точностных характеристик аналогового канала МПУ ТЗ, если сигнал не используется в других подсистемах, должна включать в себя следующие показатели:
основная погрешность срабатывания выходных элементов (относительно уставок) по уровню параметра, зоне возврата и выдержке времени;
дополнительные погрешности срабатывания выходных элементов по уровню параметра, зоне возврата и выдержке времени при отклонении температуры окружающего воздуха на ±10°С от нормального значения (20°С);
дополнительные погрешности срабатывания выходных реле по уровню параметра, зоне возврата и выдержке времени при отклонении напряжения питания на +10%, -15% от номинального значения 220 В;
диапазон уставок (диапазон измерения).
5.8.4. Если сигнал аналогового канала МПУ ТЗ передается и используется в других подсистемах АСУ ТП, для которых требуется подтверждение специальных метрологических характеристик, к этому каналу предъявляются соответствующие требования.
5.8.5. Количественные значения для основных нормируемых характеристик порогового элемента указаны в разд. 5.4.2 настоящих Технических требований. Остальные точностные характеристики нормируются на стадиях технического и рабочего проектов МПУ ТЗ.
5.8.6. Оценка точностных характеристик АЦП и аналоговых каналов МПУ ТЗ должна осуществляться экспериментальными методами по [ 26 , 27 ].
5.8.7. Микропроцессорное устройство ТЗ должно обеспечивать возможность проведения поверки АЦП в процессе эксплуатации. Межповерочные интервалы устанавливаются разработчиком. При поверке должны использоваться образцовые средства и оборудование, предусмотренные в действующих методиках [ 28 ], или аналогичные им. Применяемые для этой цели специальные технические средства должны поставляться в комплекте МПУ ТЗ.
5.8.8. В МПУ ТЗ должна быть предусмотрена возможность:
проверки погрешности измерительных каналов с выводом результатов на печать;
периодического автоматического контроля и коррекции погрешности АЦП.
Автоматический контроль погрешности АЦП с заданным периодом должен проводиться в точках, соответствующих началу диапазона (или нулевой точке), и в точке, близкой к уставке срабатывания для измеряемого параметра. По результатам указанного контроля должны определяться и автоматически вводиться программным способом поправки к результатам измерения.
5.9. Требования к надежности и безопасности
5.9.1. Микропроцессорное устройство ТЗ относится к восстанавливаемым обслуживаемым системам длительного функционирования в режиме "ожидания".
5.9.2. Технологические защиты подразделяются на две группы: защиты группы А, срабатывающие в аварийных ситуациях,
создающих опасность для жизни персонала и сохранности оборудования;
защиты группы Б, срабатывающие в аварийных ситуациях, создающих опасность повреждения оборудования или сокращения его ресурса.
Требования к надежности реализации отдельной ТЗ определяются принадлежностью данной ТЗ к той или иной группе: А или Б.
Перечень защит с указанием, к какой из групп она относится, приведен в приложении 3.
К защитным блокировкам предъявляются такие же требования, как к защитам группы Б.
К сервисным функциям предъявляются такие же требования, как к защитам группы А.
5.9.3. Надежность системы определяется надежностью ее технических средств (аппаратная надежность) и функциональной надежностью - степенью живучести человеко-машинной системы.
5.9.4. Функциональная надежность определяется следующими свойствами системы:
структурой;
степенью резервирования элементов;
глубиной самодиагностики;
объемом задач автоматической реструктуризации системы при обнаружении отказа;
степенью защиты системы от неправильных действий оперативного и ремонтного персонала при взаимодействии с ней;
эффективностью взаимодействия персонала и системы при ее отказах;
качеством связи системы с персоналом ЦТАИ, определяющим быстроту обнаружения отказа системы и его устранения.
Для ТЗ группы А живучесть должна обеспечиваться на уровне критерия единичного отказа, т.е. любой единичный отказ в технических средствах МПУ ТЗ не должен приводить к несрабатыванию или ложному срабатыванию защит.
5.9.5. Проект МПУ ТЗ, выполненный для конкретного оборудования, должен создаваться на основании качественного анализа функциональной надежности принятых технических решений. При анализе должны учитываться все возможные виды отказов элементов, составляющих систему: скрытые (пассивные), зависимые, по общей причине и др.
Система, подлежащая анализу, состоит из датчиков, каналов связи МПУ ТЗ с датчиками и ИУ, входных и выходных УСО, алгоритмов (обработки сигналов датчиков, технологической защиты, включая функцию автоматического ввода, формирования выходных команд), электромагнитных реле или другого типа, контакты которых реализуют команды ТЗ на исполнительные устройства, устройств электропитания элементов ТЗ.
Количественные показатели и критерии функциональной надежности для МПУ ТЗ в настоящих Технических требованиях не устанавливаются.
5.9.6. Показателями аппаратной надежности отдельных каналов МПУ ТЗ являются:
вероятность несрабатывания ТЗ при запросе для заданного периода планового технического обслуживания и среднего времени устранения неисправности, зафиксированной средствами диагностики;
параметр потока ложных срабатываний.
Для упрощения расчетов допускается оценка первого из показателей значением коэффициента неготовности системы.
Показатели рассчитываются для отдельной ТЗ, реализованной в МПУ ТЗ, от УСО датчика до элемента, реализующего команду ТЗ на ИУ (контакт электромагнитного реле и т.д.).
5.9.7. Требования к аппаратной надежности отдельной ТЗ указаны в таблице, приведенной ниже составленной с учетом следующего:
несрабатывание ТЗ заключается в отсутствии команды ТЗ на ИУ при наличии запроса на срабатывание ТЗ;
ложное срабатывание ТЗ заключается в выработке команды ТЗ на ИУ при отсутствии условий, требующих срабатывания ТЗ;
общая надежность каждой ТЗ определяется суммой критических и некритических аппаратных отказов;
критическим отказом ТЗ является несрабатывание при запросе хотя бы одного из особо важных в технологическом отношении ИУ рассматриваемой ТЗ по вине аппаратных средств МПУ ТЗ; критический отказ может повлечь за собой тяжелые последствия для персонала и технологического оборудования, если персонал не сумел вовремя продублировать команду МПУ ТЗ на данное ИУ;
некритическим отказом ТЗ является несрабатывание при запросе хотя бы одного из ИУ рассматриваемой ТЗ по вине аппаратных средств МПУ ТЗ, однако наличие последовательно установленных ИУ, имеющиеся резервы времени и ресурсы оперативного персонала дают возможность не допустить или устранить последствия такого отказа;
до создания специальных документов по обслуживанию ТЗ на МПТ требования установлены: для ТЗ группы А при цикле технического обслуживания (периодического опробования ТЗ) 1 мес (700 ч), для ТЗ группы Б - 3 мес. (2000 ч) [ 29 ];
периодическое опробование включает в себя проверку исправности элементов ТЗ, не контролируемых при самодиагностике технических средств; если все элементы, на которых реализована данная ТЗ, охвачены программой диагностики, ее периодическое опробование не производится [ 30 ];
среднее время восстановления индицируемых отказов при проектных расчетах принимается, исходя из односменного обслуживания МПУ ТЗ ремонтным персоналом (18 ч);
нормативы должны выполняться при работе оборудования в условиях, оговоренных в разд. 5.3 .
Аппаратная надежность МПУ ТЗ (на одну ТЗ или ЗБ)
|
Защиты, реализуемые в МПУ ТЗ |
Вероятность несрабатывания при запросе, не более |
Параметр потока ложных срабатываний, 1/год, не более |
|
|
Критический отказ |
Некритический отказ |
||
|
Группа А Группа Б |
0,002 0,007 |
0,01 0,03 |
0,02 0.05 |
5.9.8. Показатель суммарного потока ложных срабатываний всех видов для всех ТЗ группы А в целом не должен превышать значение 0,05 1/год, группы Б - 0,15 1/год.
5.9.9. Показателем аппаратной надежности МПУ ТЗ в целом является показатель суммарного потока повреждений (не только отказов), требующих привлечения ремонтного персонала. Этот показатель не должен превышать значение 2,5 1/год.
5.9.10. Подтверждение показателей надежности МПУ ТЗ на проектной стадии производится аналитическим (расчетным) путем по [ 31 - 33 ] и другим документам.
5.9.11.Подтверждение показателей надежности МПУ ТЗ на стадии опытной эксплуатации производится путем проведения контрольных испытаний МПУ ТЗ в целом на надежность с планируемыми нулевым числом отказов и временем испытаний по [34]. На стадии эксплуатации производятся определительные испытания на надежность отдельных ТЗ путем сбора статистических данных об отказах и сбоях [ 35 ].
5.9.12.Микропроцессорное устройство ТЗ не должно допускать ложного срабатывания или отказа срабатывания защит при обрыве или коротком замыкании любой линии связи.
5.9.13.При диагностируемом отказе резервируемого элемента МПУ ТЗ аварийная реструктуризация системы должна приводить к увеличению ее готовности даже за счет увеличения вероятности ложных срабатываний.
5.9.14.Средний срок службы МПУ ТЗ должен быть не менее 15 лет.
5.9.15.Показатель срока службы должен подтверждаться расчетным путем.
В состав эксплуатационной документации на устройство должны быть включены перечни элементов МПУ ТЗ, рекомендуемых к замене во время очередного текущего или капитального ремонта. Заменяемые элементы входят в состав ЗИП и обеспечиваются поставщиком МПУ ТЗ в течение всего срока службы системы. В течение срока службы допускается замена поставщиком исходных типов сменных элементов на другие, более совершенные, при условии их полной совместимости по конструктивам и интерфейсам.
5.9.16. Микропроцессорное устройство ТЗ должно удовлетворять общим требованиям безопасности и электробезопасности [ 36 - 39 ], правилам пожаробезопасности [ 13 , 40 ], правилам устройства электроустановок [41]. Пожарная безопасность должна обеспечиваться как в нормальном, так и в аварийном режимах работы. Уровень безопасности программного обеспечения должен быть согласно п. 5.6.9 .
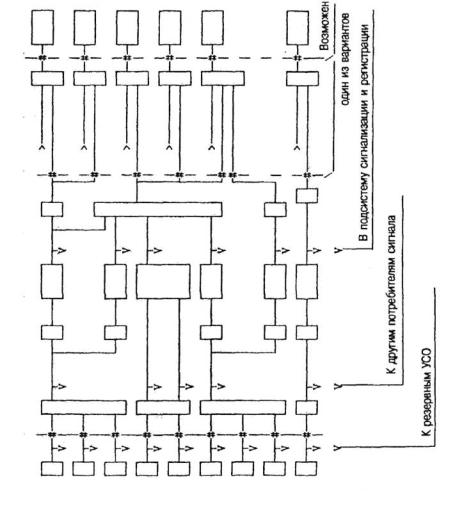
Приложение 1
ТИПОВАЯ СТРУКТУРА МПУ ТЗ
|
Элементы подсистемы ТЗ |
Элементы подсистемы ДУ |
||||||
|
Датчик и |
Функция ТЗ, реализованная на МПТ |
Командные воздействия на ИУ |
Алгоритм управления ИУ, узел приоритетов |
Привод ИУ |
|||
|
Обработка, диагностика сигнала |
Сравнение суставкам и ТЗ |
Алгоритм ТЗ |
Алгоритм программ действия ТЗ
|
||||
|
|
|
|
|
|
|
|
|
Приложение 2
ТИПОВОЙ ПЕРЕЧЕНЬ ИУТЗ
|
Наименование ИУ |
Значимое тьИУ |
Количество на единицу энергооборудования |
|
1. На водогрейном котле: |
|
|
|
1.1. Запорные устройства на линии подвода газа к котлу |
0 |
2 |
|
1.2. Запорные устройства на линии подвода газа к каждой горелке |
|
3 на горелку |
|
1.3. Запорные устройства на линии подвода мазута к котлу |
0 |
2 |
|
1.4. Запорные устройства на линии рециркуляции мазута |
|
1 |
|
1.5. Запорные устройства на пинии подвода мазута к каждой горелке |
|
2 на горелку |
|
1.6. Устройства, подающие твердое топливо в котел |
0 |
2-16 в зависимости от схемы оборудования |
|
1.7. Запальные устройства |
|
1 на горелку |
|
1.8. Запорные устройства на общей линии подвода газа к запальным устройствам |
0 |
2 |
|
1.9. Регулятор общего воздуха |
|
1 |
|
1.10. Запорные устройства на линии подвода вторичного воздуха к горелке |
|
1-2 на горелку |
|
1.11. Запорные устройства на пинии подвода пара на продувку мазутной горелки |
|
1 на горелку |
|
2. На барабанном паровом котле: |
|
|
|
2.1. Запорные устройства на линии подвода газа к котлу |
0 |
2 |
|
2.2. Запорные устройства на линии подвода газа к каждой горелке |
|
3-4 на горелку |
|
2.3. Запорные устройства на линии подвода мазута к котлу |
0 |
2 |
|
2.4. Запорные устройства на линии рециркуляции мазута |
|
1(2) |
|
2.5. Запорные устройства на линии подвода мазута к каждой горелке |
|
2 на горелку |
|
2.6. Устройства, подающие твердое топливо в котел (мельницы или ВСА) |
0 |
2-32 в зависимости от схемы оборудования |
|
2.7. Запальные устройства |
|
1 на горелку |
|
2.8. Запорные устройства на общей линии подвода газа к запальным устройствам |
0 |
2 |
|
2.9. Запорные устройства на линии подвода вторичного воздуха к горелке |
|
1-2 на горелку |
|
2.10. Запорные устройства на линии подвода пара на продувку мазутной горелки |
|
1 на горелку |
|
2.11. Главные паровые задвижки и их байпасы |
0 |
2-4 |
|
2.12. Задвижки на промежуточном пароперегревателе (дубль-блока) |
|
4 |
|
2.13. Задвижки на линиях впрысков |
|
8-10 |
|
2.14. Регуляторы общего воздуха, рециркуляции дымовых газов |
|
2 |
|
2.15. Регулятор топлива (включение задатчика) |
|
1(3) |
|
2.16. Форсунки подхвата факела |
|
4(8) |
|
2.17. Регулятор температуры пара промперегрева |
|
1 |
|
2.18. Задвижки на линии аварийного сброса из барабана котла |
0 |
2 |
|
3. На прямоточном паровом котле : |
|
|
|
3.1. Запорные устройства на линии подвода газа к котлу |
0 |
2 |
|
3.2. Запорные устройства на линии подвода газа к каждой горелке |
|
3-4 на горелку |
|
3.3. Запорные устройства на линии подвода мазута к котлу |
0 |
2 |
|
3.4. Запорные устройства на линии рециркуляции мазута |
|
1 |
|
3.5. Запорные устройства на линии подвода мазута к каждой горелке |
|
2 на горелку |
|
3.6. Устройства, подающие твердое топливо в котел (мельницы или ВОД) |
0 |
2-32 в зависимости от схемы оборудования |
|
3.7. Запальные устройства |
|
1 на горелку |
|
3.8. Запорные устройства на общей линии подвода газа к запальным устройствам |
0 |
2 |
|
3.9. Задвижки на линиях всех впрысков |
|
10-12 |
|
3.10. Запорные устройства на линии подвода вторичного воздуха к горелке |
|
1 -2 на горелку |
|
3.11. Запорные устройства на линии подвода пара на продувку мазутной горелки |
|
1 на горелку |
|
3.12. Регуляторы общего воздуха, рециркуляции дымовых газов, температуры пара промперегрева |
|
3 |
|
3.13. Регулятор нагрузки (включение задатчика) |
|
1 |
|
3.14. Направляющий аппарат ДРГ |
|
|
|
3.15. Байпас парового теплообменника |
|
2 |
|
3.16. Форсунки подхвата факела |
|
4(8) |
|
4. На паровой турбине: |
|
|
|
4.1. Привод стопорных клапанов |
0 |
I |
|
4.2. Главные паровые задвижки и их байпасы |
|
4 |
|
4.3. Привод обратных клапанов на отборах |
0 |
2 |
|
4.4. Задвижки па отборах |
|
10(12) |
|
4,5. Выключатель трансформатора собственных нужд |
0 |
1 |
|
4.6. Выключатель генератора |
0 |
1 |
|
4.7. Аварийные маслонасосы |
0 |
1(2) |
|
4.8. Привод впускного клапана на обводе группы ПВД |
0 |
2 |
|
4.9. Задвижки, отключающие группу ПВД по воде |
0 |
3 |
|
4.10. Задвижки на дренажах ПВД |
|
4 |
|
4.11. Задвижки, отключающие ПСГ турбин типа Г |
0 |
6 |
|
5. На питательном электронасосе: |
|
|
|
5.1. Выключатель электродвигателя |
0 |
1 |
|
5.2. Задвижка на линии рециркуляции |
0 |
1 |
|
5.3. Задвижка на стороне нагнетания насоса |
0 |
1 |
|
5.4. Задвижка на линии подвода питательной воды из промежуточной ступени |
|
1 |
|
6. На питательном турбонасосе: |
|
|
|
6.1. Привод стопорного клапана турбопривода |
0 |
1 |
|
6.2. Привод синхронизатора турбопривода |
|
1 |
|
6.3. Задвижка на стороне нагнетания насоса |
0 |
1 |
|
6.4. Задвижка на линии подвода питательной воды из промежуточной ступени |
|
1 |
|
6.5. Задвижка на линии рециркуляции |
0 |
1 |
|
7. На блоке: |
|
|
|
7.1. Задвижки перевода на резервное питание деаэратора, уплотнений турбины, калориферов |
|
6 |
|
7.2. Задвижки и приводы ПСБУ (БРОУ) |
|
6 |
|
Примечания : 1. Количество исполнительных устройств защиты уточняется для конкретного теплоэнергетического оборудования. 2. В гр. "Значимость ИУ" особо ответственные с точки зрения надежности отключения оборудования исполнительные устройства зашиты отмечены буквой "О". |
||
Приложение 3
ТИПОВОЙ ПЕРЕЧЕНЬ ТЗ
|
Наименование ТЗ
|
Тип ТЗ
|
Количество датчиков |
|||
|
ТЗ |
автоматического ввода |
||||
|
дискретных |
аналог о вых |
дискретных |
аналог о вых |
||
|
1 |
2 |
3 |
4 |
5 |
6 |
|
1. Водогрейный котел: |
|
|
|
|
|
|
1.1. Понижение давления воды за котлом |
Б |
1 |
1 |
2 |
- |
|
1.2. Повышение температуры воды на выходе из котла |
Б |
1 |
1 |
- |
- |
|
1.3. Понижение расхода воды через котел |
Б |
1 |
1 |
п. 1.1 |
- |
|
1.4. Погасание факела в топке |
А |
1(2) |
- |
1 |
1 |
|
1.5. Понижение давления газа перед регулирующим клапаном |
А |
1 |
1 |
1(2) |
- |
|
1.6. Понижение давления мазута перед регулирующим клапаном |
А |
1 |
1 |
1(2) |
|
|
1.7. Понижение давления масла в системе смазки мельниц |
Б |
1 |
1 |
1 |
- |
|
1.8. Повышение давления воды за котлом |
Б |
1 |
п. 1.1 |
- |
- |
|
1.9. Отключение дымососа |
А |
1 |
- |
п. 1.1 |
- |
|
1.10. Отключение всех дутьевых вентиляторов |
А |
2 |
- |
п. 1.1 |
- |
|
1.11. Отключение всех ВИВ ( MB ) |
Б |
2 |
- |
п. 1.1 |
- |
|
1.12. Потускнение пылеугольного факела |
Б |
п. 1.4 |
- |
- |
- |
|
2. Барабанный паровой котел: |
|
|
|
|
|
|
2.1 . Повышение уровня в барабанекотла |
Б |
- |
3 |
1 |
- |
|
2.2. Понижение уровня в барабане котла |
Б |
|
п. 2.1 |
п. 2.1 |
- |
|
2.3. Погасание факела в топке |
А |
2(4) |
- |
1 |
1 |
|
2.4. Понижение давления газа после регулирующего клапана |
А |
- |
3 |
1(2) |
- |
|
2.5. Понижение давления мазута после регулирующего клапана |
А |
- |
3 |
1(2) |
- |
|
2.6. Понижение давления в системе смазки мельниц |
Б |
2 |
3 |
1 |
- |
|
2.7. Отключение всех дымососов |
А |
2 |
- |
2 |
- |
|
2.8. Отключение всех дутьевых вентиляторов |
А |
2 |
- |
п. 2.7 |
- |
|
2.9. Отключение всех РВП |
Б |
2 |
- |
п. 2.7 |
- |
|
2.10. Отключение всех ВПВ ( MB ) |
Б |
2 |
- |
п. 2.7 |
- |
|
2.11. Прекращение расхода через промежуточный пароперегреватель |
Б |
|
6 |
п. 2.7+1 |
|
|
2.12. Повышение температуры свежего пара |
Б |
- |
3 |
|
- |
|
2.13. Повышение температуры пара промперегрева |
Б |
- |
3 |
|
- |
|
2.14. Отключение одного из двух дымососов |
Б |
п. 2.7 |
- |
2 |
1 |
|
2.15. Отключение одного из двух дутьевых вентиляторов |
Б |
п. 2.8 |
- |
п. 2.14 |
п. 2.14 |
|
2.16. Отключение одного из двух РВП |
Б |
п. 2.9 |
|
п. 2.14 |
п. 2.14 |
|
2.17. Отключение одного из двух ВПВ ( MB ) |
Б |
п. 2.10 |
|
п. 2.14 |
п. 2.14 |
|
2.18. Повышение уровня в барабане до 1-го предела |
Б |
- |
п.2.1 |
п.2.1 |
- |
|
2.19. Потускнение пылеугольного факела |
Б |
п. 2.3 |
-. |
- |
- |
|
2.20. Понижение давления в топке газоплотного котла |
Б |
- |
3 |
- |
- |
|
3. Прямоточный паровой котел: |
|
|
|
|
|
|
3.1. Прекращение расхода питательной воды |
Б |
- |
6 |
2 |
- |
|
3.2. Повышение давления перед встроенной задвижкой |
А |
- |
6 |
- |
- |
|
3.3. Повышение давления перед встроенной задвижкой |
Б |
- |
п.3.2 |
п.3.1 |
- |
|
3.4. То же при пуске |
Б |
- |
п.3.2 |
п. 3.1+2 |
1 |
|
3.5. Прекращение расхода через промежуточный пароперегреватель |
Б |
|
6 |
п. 3.1+1 |
- |
|
3.6. Погасание факела в топке |
А |
2 |
- |
1 |
1 |
|
3.7. Понижение давления газа |
А |
- |
3 |
1(2) |
- |
|
3.8. Понижение давления мазута |
А |
- |
3 |
1(2) |
- |
|
3.9. Понижение давления в системе смазки мельниц |
Б |
2 |
3 |
п.3.1 |
- |
|
3.10. Отключение всех дымососов |
А |
2 |
- |
п.3.1 |
- |
|
3.11 . Отключение всех дутьевых вентиляторов |
А |
2 |
- |
п.3.1 |
- |
|
3.12. Отключение всех РВП |
Б |
2 |
- |
п.3.1 |
- |
|
3.13. Отключение всех ВПВ ( MB ) |
Б |
2 |
- |
п.3.1 |
- |
|
3.14. Отключение одного из двух дымососов |
Б |
п. 3.10 |
- |
2 |
1 |
|
3.15. Отключение одного из двух вентиляторов |
Б |
п. 3.11 |
- |
п.3.14 |
п.3.14 |
|
3.16. Отключение одного из двух РВП |
Б |
п. 3.12 |
- |
п.3.14 |
п.3.14 |
|
3.17. Отключение одного из двух ВПВ ( MB ) |
Б |
п. 3.13 |
- |
п.3.14 |
п.3.14 |
|
3.18. Повышение температуры свежего пара |
Б |
- |
6 |
- |
- |
|
3.19. Повышение температуры пара промперегрева |
Б |
- |
6 |
- |
- |
|
3.20. Потускнение пылеугольного факела |
Б |
п. 3.6 |
|
- |
- |
|
3.21. Понижение давления в топке газоплотного котла |
Б |
2 |
3 |
- |
- |
|
4. Паровая турбина: |
|
|
|
|
|
|
4.1. Осевое смещение ротора |
Б |
2 |
3 |
- |
- |
|
4.2. Понижение давления в системе смазки |
А |
2(3) |
3 |
- |
- |
|
4.3. Повышение давления в конденсаторе |
Б |
2(3) |
3 |
2 |
1 |
|
4.4. Повышение виброскорости корпусов подшипников |
А |
1(3) |
- |
- |
- |
|
4.5. Понижение температуры свежего пара перед турбиной |
Б |
2 |
6 |
2 |
- |
|
4.6. Понижение уровня в демпферном маслобаке |
А |
2 . |
- |
- |
- |
|
4.7. Отключение всех маслонасосов системы уплотнений вала |
Б |
2 |
- |
- |
- |
|
4.8. Понижение расхода воды через обмотку статора генератора |
Б |
- |
3 |
- |
- |
|
4.9. Понижение расхода воды на газоохладители или отключение всех насосов газоохладителей |
Б |
- |
3 |
- |
- |
|
Б |
2 |
- |
- |
- |
|
|
4.10. Повышение давления пара в сетевом подогревателе турбины типа Т |
Б |
2 |
3 |
- |
- |
|
4.11. Повышение температуры масла при понижении давления воды перед маслоохладителем турбины типа Т (7М3) |
Б |
2 |
6 |
- |
- |
|
4.12. Повышение температуры свежего пара перед турбиной ТМЗ на ТЭС с поперечными связями |
Б |
2(4) |
п.4.5 |
- |
- |
|
4.13. Повышение перепада давлений на последней ступени турбины с противодавлением |
А |
1 |
3 |
- |
- |
|
4.14. Повышение уровня в ПВД до 2-го предела |
А |
6 |
9 |
- |
- |
|
4.15. Внутренние повреждения блока генератор-трансформатор |
Б |
1 |
- |
- |
- |
|
4.16. Возникновение асинхронного режима |
Б |
1 |
- |
- |
- |
|
4.17. Отключение генератора от сети вследствие внешних повреждений |
Б |
1 |
- |
- |
- |
|
4.18. Повышение температуры пара, сбрасываемого в конденсатор |
Б |
2 |
3 |
- |
- |
|
4.19. Повышение давления в конденсаторе турбины при пуске |
Б |
п.4.3 |
п.4.3 |
|
- |
|
4.20. Понижение давления в системе смазки до 1-го предела |
Б |
5 |
п. 4.2 |
- |
- |
|
4.21. Повышение уровня в ПВД до 1 -го предела |
Б |
п.4.14 |
п.4.14 |
- |
- |
|
4.22. Понижение давления греющего паре в ПВД |
Б |
2 |
1 |
- |
- |
|
4.23. Повышение уровня в сетевом подогревателе турбины типа Т |
Б |
4 |
6 |
- |
- |
|
5. Питательный электронасос: |
|
|
|
|
|
|
5.1. Понижение давления в системе смазки насоса |
Б |
1 |
1 |
1 |
- |
|
5.2. Не открытие вентиля рециркуляции |
Б |
1 |
- |
- |
- |
|
5.3. Понижение расхода воды через ротор или статор электродвигателя |
Б |
2 |
2 |
п. 5.1 |
- |
|
5.4. Понижение расхода веды через насос |
Б |
1 |
1 |
- |
- |
|
6. Питательный турбонасос: |
|
|
|
|
|
|
6. 1 . Понижение давления в системе смазки насоса |
Б |
1 |
1 |
1 |
- |
|
6.2. Неоткрытие вентиля рециркуляции |
Б |
1 |
- |
- |
- |
|
6.3. Осевое смещение ротора |
Б |
1 |
1 |
- |
- |
|
6.4. Понижение давления на стороне нагнетания |
Б |
2 |
3 |
п.6.1 |
- |
|
6.5. Повышение давления на стороне нагнетания |
Б |
2 |
п.6.4 |
- |
- |
|
6.6. Осевое смещение ротора приводной турбины |
А |
1 |
1 |
- |
- |
|
6.7. Повышение давления в конденсаторе турбопривода |
Б |
1 |
1 |
- |
- |
|
6.8. Понижение расхода воды через насос |
Б |
1 |
1 |
- |
- |
|
7. Общеблочные защиты, не вошедшие в другие пункты данного приложения: |
|
|
|
|
|
|
7.1. Останов котла моноблока или двух котлов дубль-блока |
Б |
- |
- |
- |
- |
|
7.2. Отключение всех питательных насосов |
Б |
2(3) |
- |
- |
- |
|
7.3. Повышение уровня в деаэраторе |
А |
3 |
3 |
- |
- |
|
7.4. Отключение турбины |
Б |
2(4) |
- |
- |
- |
|
7.5. Повышение давления свежего пара до уставки включения ПСБУ |
Б |
1 |
1 |
- |
- |
|
Примечания 1. В перечень включены защиты теплоэнергетического оборудования, регламентированные действующими руководящими документами [ 1 - 4 ]. В перечень не вошли: защиты, выполняемые системой регулирования турбины; автономные защиты, действующие на открытие предохранительных клапанов на свежем паре и паре промперегрева; специфические защиты блоков большой мощности (500 и 800 МВт); автономные защиты и блокировки горелочных устройств. 2. Дискретные и аналоговые датчики в ф. 3 и 4 или в 5 и 6 взаимно исключают друг друга. 3. В скобках указано возможное количество датчиков при другой модификации оборудования. 4. Комплект датчиков, участвующих в нескольких защитах, упоминается в данном приложении один раз - в том пункте, где он встречается впервые. В остальных случаях дана ссылка на этот пункт. |
|||||
Приложение 4
ОСНОВНЫЕ АЛГОРИТМЫ, РЕАЛИЗУЕМЫЕ МПУ Т

Рис. П4.1. Формирование условий срабатывания ТЗ
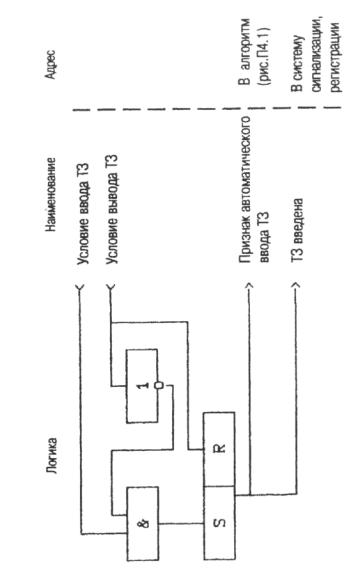
Рис. П4.2. Формирование признака автоматического ввода ТЗ
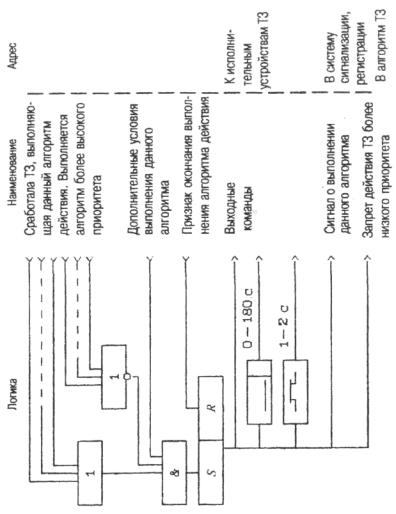
Рис. П4.3. Алгоритм действия ТЗ
Список использованной литературы
1. Объем и технические условия на выполнение технологических защит теплоэнергетического оборудования электростанций с поперечными связями и водогрейных котлов: РД 34.35.131-95. - М: СПООРГРЭС, 1997.
2. Объем и технические условия на выполнение технологических защит теплоэнергетического оборудования моноблоков с прямоточными котлами: РД 34.35.133-95.- М: СПО ОРГРЭС, 1997.
3. Объем и технические условия на выполнение технологических защит теплоэнергетического оборудования блоков с барабанными котлами: РД 34.35.132-95.- М.: СПООРГРЭС, 1997.
4. Циркуляр Ц-06-98 (Т). О внесении изменений в объемы и технические условия на выполнение технологических защит для действующих ТЭС и котельных.- М.: СПО ОРГРЭС, 1999.
5. Руководящие указания по составу и ведению эксплуатационной документации в цехах тепловой автоматики и измерений тепловых электростанций.- М: СПО Союзтехэнерго, 1979.
6. ГОСТ 15150-69. Машины, приборы и другие технические изделия. Исполнения для различных климатических районов. Категории, условия эксплуатации, хранения и транспортирования в части воздействия климатических факторов внешней среды.
7. ГОСТ 17516.1-90Е. Изделия электротехнические. Общие требования в части стойкости к механическим внешним воздействующим факторам.
8. ГОСТ 24682-81. Изделия электротехнические. Общие технические требования в части воздействия специальных сред.
9. Правила технической эксплуатации электрических станций и сетей Российской Федерации: РД 34.20.501-95.- М: СПО ОРГРЭС. 1996.
10. Сборник распорядительных документов по эксплуатации энергосистем. (Теплотехническая часть).- М.: ЗАО "Энергосервис", 1998.
11. ГОСТ Р 50431-92. Термопара. Часть 1. Номинальные статические характеристики преобразования.
12. ГОСТ 6651-94. Термопреобразователи сопротивления. Общие технические требования и методы испытаний.
13. ГОСТ 12.1.004-91. ССБТ. Пожарная безопасность. Общие требования.
14. ГОСТ Р 50377-92. Безопасность оборудования информационной технологии, включая электрическое конторское оборудование.
15. ГОСТ 22789-94. Устройства комплектные низковольтные. Общие технические условия.
16. МЭК 1000-4-8-93. Техника испытаний и измерений. Испытания на устойчивость магнитному полю промышленной частоты. - М.: Издательство стандартов, 1994.
17. ГОСТ 29191-91. Совместимость технических средств электромагнитная. Устойчивость к электростатическим разрядам. Технические требования и методы испытаний.
18. ГОСТ 29156-91. Совместимость технических средств электромагнитная. Устойчивость к наносекундным импульсным помехам. Технические требования и методы испытаний.
19. ГОСТ 29073-91. Совместимость технических средств измерения, контроля и управления промышленными процессами электромагнитная. Устойчивость к электромагнитным помехам. Общие положения
20. Нормы 15-78. Общесоюзные нормы допустимых индустриальных помех. Оборудование и аппаратура, устанавливаемые совместно со служебными радиоприемными устройствами гражданского назначения. Допустимые величины. Методы испытаний, - М.: Издательство стандартов, 1978.
21. ГОСТ 29216-91. Совместимость технических средств электромагнитная. Радиопомехи индустриальные от оборудования информационной техники. Нормы и методы испытаний.
22. ГОСТ 24.104-85. ЕСС АСУ. Автоматизированные системы управления. Общие требования.
23. РД 50-34.698-90. Методические указания. Информационная технология. Комплекс стандартов и руководящих документов на автоматизированные системы. Автоматизированные системы. Требования к содержанию документов.
24. ГОСТ 19.001-77. ЕСПД. Общие положения
25. МЭК ПК 65А/РГ9/45. Программное обеспечение АСУ ТП, критичных к вопросам безопасности. Ч. I , II .- М.: Издательство стандартов, 1989.
26. Методические указания. Информационно-измерительные системы. Методика обработки экспериментальных данных метрологической аттестации: РД 34.11.206-94.- М.: СПО ОРГРЭС, 1995.
27. Методика определения обобщенных метрологических характеристик измерительных каналов ИИС и АСУ ТП по метрологическим характеристикам агрегатных средств измерений: МТ 34-70-038-87.- М: СПО Союзтехэнерго, 1987.
28. МИ 1202-76. Приборы и преобразователи измерения напряжения, тока, сопротивления цифровые. Общие требования к методике поверки.
29. Нормы технического обслуживания технологических защит теплоэнергетического оборудования на тепловых электростанциях. - М: СПО ОРГРЭС, 1977.
30. Методические указания по эксплуатации технологических защит, выполненных на базе микропроцессорной техники. - М.: СПО ОРГРЭС, 2000.
31. МУ 25.678-84. Методические указания. Аналитическая оценка показателей надежности автоматизированных систем управления технологическими процессами. - М.: Минприбор, 1984.
32. РТМ 25.714-85. Руководящий технический материал. Приборы и средства автоматизации. Автоматизированная оценка показателей надежности на этапе проектирования.- М.: Минприбор, 1985.
33. РМ 25 893-88. Рекомендуемый материал. Приборы и средства автоматизации. Система автоматизированного типового унифицированного расчета надежности - САПР САТУРН. Многовариантный анализ надежности при проектировании. - М: Минприбор, 1988.
34. ГОСТ 27.410-87, Надежность в технике. Методы контроля показателей надежности и планы контрольных испытаний на надежность
35. РД 50-690-89. Методические указания. Надежность в технике. Методы оценки показателей надежности по экспериментальным данным.
36. ГОСТ 12.2.003-91. ССБТ. Оборудование производственное. Общие требования безопасности.
37. ГОСТ 12.2.007.0-75. ССБТ. Изделия электротехнические. Общие требования безопасности.
38. ГОСТ 25861-83. Машины вычислительные и системы обработки данных. Требования по электрической и механической безопасности и методы испытаний.
39. ГОСТ 12.1.030-81. ССБТ. Электробезопасность. Защитное заземление, зануление.
40. Правила пожарной безопасности для энергетических предприятий: РД 153.34.0-03.301-00.-М.: ЗАО "Энергетические технологии", 2000.