Министерство транспортного строительства
Всесоюзный проектно-технологический институт транспортного строительства «ВПТИтрансстрой»
Технологическая карта
комплексно-механизированного процесса
на возведение насыпи земляного полотна
с разработкой грунтов в карьере экскаватором
и транспортировкой автосамосвалами
с применением
землеройно-планировочных машин,
оснащенных автоматическими системами
управления рабочими органами
Москва 1984
Технологическая карта разработана Всесоюзным проектно-технологическим институтом транспортного строительства «ВПТИтрансстрой» Минтрансстроя совместно с научно-производственным объединением Всесоюзного научно-исследовательского института строительного и дорожного машиностроения (НПО ВНИИстройдормаш) Минстройдормаша.
Технологическая карта рассмотрена на заседании технического совета ВПТИтрансстроя протокол № 10 от 28.12.83 г.
Исполнители:
Зав. отделом строительства
железных дорог А.Б. Набатов
Гл. Конструктор отдела
автодорог и аэродромов В.П. Захаров
Зав. лабораторией
ВНИИстройдормаша Э.И. Толстопятенко
Редактор Ю.Н. Дерюгин
СОДЕРЖАНИЕ
|
2. Технология и организация строительного процесса 3. Технико-экономические показатели |
1. Область применения
1.1. Содержание технологической карты
Технологическая карта составлена на возведение насыпи однопутного железнодорожного земляного полотна, с разработкой грунтов II группы в карьере экскаватором ЭО-6112Б (Э-125Б) с ковшом вместимостью 1,25 м3, оборудованным прямой лопатой, с транспортировкой грунтов автосамосвалами грузоподъемностью 11 т (с применением при послойном разравнивании грунта бульдозера ДЗ-109А-1, оснащенного системой автоматики «Копир-Автоплан-10») и при нарезке сливной призмы автогрейдером, оснащенным системой автоматики «Профиль-20», работающей по лазерным направляющим. Вместо бульдозера ДЗ-109А-1 может быть использован бульдозер ДЗ-110-1 с системой автоматики «Комбиплан-10».
1.1.1. Краткое описание работы системы автоматики «Копир-Автоплан-10».
Система автоматики «Копир-Автоплан-10» состоит из лазерного излучателя, фотоприемного устройства с механизмом перемещения, электрогидрораспределителя, системы автоматического управления рабочим органом при перегрузке двигателя, блока управления подъемным устройством и пульта управления системой автоматики.
Принципиальная схема работы бульдозера ДЗ-109А-1 с системой автоматики «Копир-Автоплан-10» показана на рис. 1.
Управление отвалом бульдозера состоит в перемещении его по высоте для удержания режущей кромки отвала на траектории заданной плоскости при движении машины вдоль планируемой поверхности.
Автоматическая стимуляция рабочих органов машин обеспечивается копирной системой, в которой опорная оптическая плоскость создается вращением лазерного луча при помощи пентопризмы, скорость вращения которой выбрана исходя из максимальной рабочей скорости перемещения строительных машин и составляет 72 - 108 об/мин, а чувствительным элементом является фотоприемное устройство (ФПУ). В качестве источника излучения используется гелий-неоновый лазер ОКГ-13, работающий в непрерывном режиме на волне 0,6328 мкм с выходной мощностью не менее 200 мкВт.
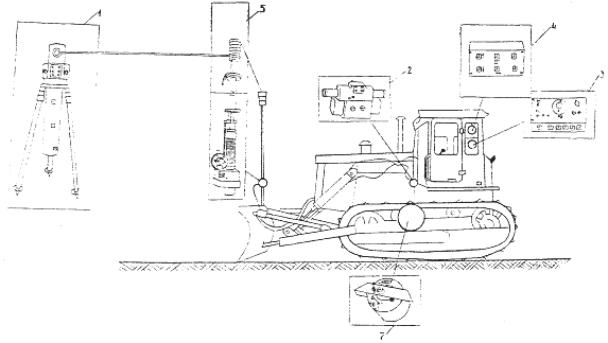
Рис. 1. Принципиальная схема работы бульдозера Д3-109-А-1 с аппаратурой «Копир-Автоплан-10»:
1 - лазерный излучатель; 2 - электрогидрораспределитель; 3 - пульт управления бульдозером; 4 - блок управления подъемным устройством; 5 - фотоэлектрический приемник; 6 - подъемное устройство; 7 - угловой датчик автономной системы управления положением отвала
Дальность действия излучателя - до 500 м.
Фотоприемное устройство (рис. 2), состоящее из трех фотоэлементов (верхнего, среднего и нижнего), вместе с механизмом перемещения устанавливается на кронштейне, который закрепляется на рабочем органе машины.
Фотоэлементы подключены к электромагнитам трехпозиционного электрогидрозолотника в гидросистеме цилиндра подъема и опускания отвала бульдозера.
Электрическая схема собрана так, что, пока средний фотоэлемент находится в плоскости лазерного луча, гидроцилиндр заперт.
При движении по неровной поверхности фотоэлектрический приемник вместе с машиной поднимается или опускается, и средний фотоэлемент выходит из плоскости лазерного луча, уступая свое место нижнему или верхнему фотоэлементу. Это вызывает мгновенное включение электрогидрозолотника, и режущая кромка рабочего органа машины вместе с фотоприемником опускается или поднимается так, что средний фотоэлемент возвращается в плоскость лазерного луча.
В результате режущая кромка рабочего органа машины всегда движется строго параллельно лазерной плоскости.
С одного поста лазерного излучателя можно одновременно управлять несколькими автоматизированными машинами.
Рис. 2. Фотоприемник с подъемным устройством:
1 - фотоприемное устройство; 2 - шток; 3 - механизм перемещения (МП); 4 - водило; 5 - датчик обратной связи; 6 - электродвигатель; 7 - редуктор
Для выполнения работ по планировке верха земляного полотна и нарезке сливной призмы используется автогрейдер ДЗ-31-1 (рис. 3), оборудованный системой автоматики «Профиль-20», отличающийся тем, что управление отвалом по высоте может осуществляться как по лазерному лучу при подключении фотоэлементов к электромагнитам электрогидрозолотника, так и по жесткому копиру (копир-трос) с использованием щупового датчика ДЩБ.
Планировку верха земляного полотна по лазерному копиру производят на прямолинейном участке с продольным уклоном до 30 ‰ и на участках с горизонтальными кривыми, а по жесткому копиру - на участках земляного полотна с вертикальными кривыми.
В данной технологической карте рассматривается организация работ на участке строительства с прямолинейным продольным профилем земляного полотна.
Для постановки оптической лазерной плоскости в заданное положение, в соответствии с продольным и поперечным уклонами и отметками земляного полотна, применяется лазерная геодезическая рейка (рис. 4), состоящая из фотооптической головки и усилительно-преобразовательного блока, установленных на рейке со шкалой. Питание осуществляется от трех элементов 3336.
Рис. 3. Принципиальная схема работы автогрейдера ДЗ-32-1 с системой автоматики «Профиль-20»:
1 - пульт управления системой автоматики «Профиль-20»; 2 - электрогидрораспределитель ЗСУ-8; 3 - автономный датчик контроля углового положения отвала ДКБ; 4 - щуповой датчик управления отвалом по высоте, работающий по копиру ДЩБ; 5 - фотоэлектрический приемник; 6 - подъемное устройство
Рис. 4. Геодезическая лазерная рейка
Техническая характеристика бульдозера ДЗ-109А-1 с системой «Копир-Автоплан-10»
Базовый трактор....................................................................................... Т-130.1.Г-1
Тип управления рабочим органом......................................................... гидравлический
Скорость подъема и опускания отвала, см/с
при ручном управлении................................................................. 25,0
при автоматическом управлении:
подъем.................................................................................... 7,0
опускание............................................................................... 5,0
Габаритные размеры мм:
длина............................................................................................... 4590
ширина............................................................................................ 4120
высота.............................................................................................. 3087
Габариты отвала, мм:
ширина............................................................................................ 4120
высота.............................................................................................. 140
Основной угол резания, град.................................................................. 55
Диапазон регулирования угла резания, град........................................ ± 10
Угол поперечного перехода
(в обе стороны), град............................................................................... ± 12
Тип управления измененным углом резания.............. гидравлический
и винтовой раскосами
Наибольший подъем отвала над опорной
поверхностью гусениц трактора без учета почвозацепа, мм.............. 995
Угол въезда бульдозера, град.................................................................. 24
Ход поршня гидрораскоса, мм............................................................... 200
Техническая характеристика системы «Автоплан-10»
Диапазон плавной установки стабилизируемого уклона, %.............. ± 8,8
Диапазон ступенчатой установки заданного уклона, град................. ± 48
Габаритные размеры (длина´ширина´высота), мм:
пульта управления.......................................................................... 223´164´78
блока управления........................................................................... 180´130´60
гидрозолотника.............................................................................. 373´178´84
датчика ДКБ (диаметр´высота)................................................... 156´150
Напряжение питания, В.......................................................................... 12,0
Потребляемый ток, А.............................................................................. 2,0
Масса аппаратуры, кг.............................................................................. 18,5
Техническая характеристика системы «Профиль-20»
Диапазон главной установки
стабилизируемого уклона, %.................................................................. ± 8,8
Цена деления шкалы задатчика уклона, %........................................... 0,2
Диапазон регулировки чувствительности системы
стабилизации поперечного уклона, угловые минуты.......................... от 5 до 50
Погрешность системы стабилизации
поперечного уклона, %, не более........................................................... ± 0,15
Диапазон дистанционной
установки положения по высоте, мм..................................................... от 0 до 80
Цена деления шкалы задатчика по высоте, мм.................................... 5
Диапазон регулировки чувствительности
системы управления по высоте, мм....................................................... от 1,6 до 7
Погрешность системы управления по высоте, мм............................... ± 1
Допустимый ток нагрузки, А................................................................. 2,5
Электрическое питание:
род тока........................................................................................... постоянный,
+10 %; -10 %
напряжение, В................................................................................ 12
Потребляемый ток, А, не более.............................................................. 3,5
Техническая характеристика лазерного устройства
Длина волны излучения, мкм................................................................. 0,6328
Мощность излучения, мкВт, не менее................................................... 200,0
Угол развертки, град............................................................................... 360,0
Диапазоны задания уклона, %............................................................... 3,0
Радиус действия, м.................................................................................. 5 - 500
Точность задания опорной плоскости, угловые минуты..................... ± 8,0
Размер поперечного сечения луча по вертикали:
не менее, мм................................................................................... 25,0
не более, мм.................................................................................... 80,0
Скорость вращения узла развертки излучателя, об/мин...................... 0 - 240
Напряжение питания, В:
излучателя....................................................................................... 12,0
фотоприемного устройства........................................................... 12,0
Потребляемая мощность, Вт:
излучателя....................................................................................... 30,0
фотоприемника.............................................................................. 10
Техническая характеристика автогрейдера ДЗ-122-1
Мощность двигателя, кВт....................................................................... 99
Управление рабочим органом................................................................ гидравлическое
Количество скоростей:
вперед.............................................................................................. 4
назад................................................................................................ 8
Скорость движения автогрейдера, км/ч
вперед: наименьшая не более....................................................... 2,2
наибольшая не менее......................................................... 4,3
назад: наименьшая не более......................................................... 4,7
наибольшая не менее......................................................... 25,2
Длина отвала, мм..................................................................................... 3745
Высота отвала, мм................................................................................... 620
Боковой вынос отвала в обе стороны
относительно тяговой рамы, мм не менее............................................ 800
Угол установки отвала в горизонтальной плоскости, град................. 0 + 360
Угол резания, град, (регулировка)......................................................... 30 - 70
Диапазон плавности установки стабилизирующего поперечного уклона:
плавно, %......................................................................................... ± 8,8
ступенчато, град.............................................................................. -48
Цена деления шкалы задатчика поперечного уклона, %...................... 0,2
Диапазон регулировки чувствительной
системы в поперечном уклоне, угловые минуты................................... 5 ÷ 50
Диапазон дистанционной установки по высоте, мм............................ от 0 до 80
Цена деления шкалы задатчика установки по высоте, мм................... 5
Диапазон регулировки чувствительности
системы управления по высоте, мм........................................................ 0 - 80
Погрешность выдерживания поперечного уклона, %........................... ± 0,48
Технические характеристики и инструкция по эксплуатации аппаратуры «Копир-Автоплан-10» приведены в приложении.
1.2. Реквизиты проекта конструкции
1.2.1. Разработчик систем автоматики «Копир-Автоплан-10» и «Профиль-20» - НПО ВНИИстройдормаша, г. Москва, 2-я Фрунзенская ул., 8.
1.2.2. Разработка технологической карты производилась на основании требований СНиП II-39-76, СНиП III-8-76 и инструкции ВСН 186-75.
1.3. Схема конструкции
Поперечный профиль земляного полотна приведен на рис. 5.

Рис. 5. Поперечный профиль земляного полотна однопутной железной дороги
1.4. Состав работ
В состав работ, рассматриваемых технологической картой, входят: установка поста лазерного излучателя, разработка грунта в карьере экскаваторами с погрузкой в автотранспорт; транспортировка грунта и выгрузка его в насыпь; послойное разравнивание грунта бульдозером; послойное уплотнение грунта пневмокатком; планировка верха земляного полотна и нарезка сливной призмы автогрейдером, поддержание землевозных дорог в исправном состоянии.
1.5. Характеристика условий производства работ
Настоящую технологическую карту рекомендуется применять при организации работ в условиях установившихся положительных температур наружного воздуха и допустимой влажности грунта карьера.
Для насыпей следует применять преимущественно грунты, имеющие оптимальную влажность или близкую к ней. Численное значение влажности следует определять при испытании данного грунта по методу стандартного уплотнения или другими способами (рассеянным гамма излучением, ультразвуком). При сооружении земляного полотна лаборатории строительных управлений или контрольно-испытательные посты постоянно проводят испытания грунтов. При недостаточной влажности грунты увлажняют из поливомоечной машины в отсыпанном слое перед уплотнением, а при избыточной влажности принимают меры к просушиванию грунта, рекомендуемые нормативными документами.
1.6. Указания по привязке технологической карты к местным условиям
При определении потребности в рабочих кадрах и машинах для выполнения объемов работ в планируемые сроки (во всех случаях при применении технологических карт) необходима привязка их к местным условиям.
При привязке технологической карты к местным условиям уточняют группу и характеристику грунта, тип и марку используемых машин, климатические и погодные условия строительства, а также объемы работ и затраты труда.
2. Технология и организация строительного процесса
2.1. Указания по подготовке объекта и требования к готовности предшествующих работ и строительных конструкций
До начала возведения насыпи земляного полотна должны быть выполнены все предшествующие работы согласно требованиям СНиП III-8-76, в том числе: удаление мелколесья, пней, крупных камней, разбивка земляного полотна, устройство землевозных дорог, осушение заболоченных и переувлажненных участков трассы, срезка дерна, а также отвод поверхностных и грунтовых вод, устройство освещения карьеров, ограждение места работ.
Плодородный слой почвы до начала основных работ должен быть снят в размерах, установленных техническим проектом, и уложен в отвалы для использования его в последующем при рекультивации земель.
2.2. Схема организации строительной площадки в период производства работ (рис. 6).
2.3. Указания по технологии работ
2.3.1. Последовательность выполнения работ
Технологической картой предусматривается производство работ по сооружению насыпи из грунта карьера с выполнением следующих технологических операций: установка поста лазерного излучателя; разработка грунта в карьере экскаватором с погрузкой в автотранспорт; транспортировка грунта в насыпь автосамосвалами с выгрузкой его в насыпь; послойное разравнивание грунта в теле насыпи бульдозером; послойное уплотнение грунта пневмокатком; планировка верха земляного полотна и нарезка сливной призмы автогрейдером; поддержание землевозных дорог в исправном состоянии.
Рис. 6. Схема организации строительной площадки:
I - участок по планировке верха земляного полотна автогрейдером; II - захватка по послойному уплотнению грунта пневмокатком; III - захватка по послойной отсыпке грунта автосамосвалами и разравниванию его бульдозером; z - направление фронта работ; 1 - автогрейдер; 2 - каток; 3 - бульдозер; 4 - автомобиль-самосвал; 5 - лазерный излучатель; 6 - экскаватор
2.3.2. Описание способов и методов производства работ
2.3.2.1. Установка поста лазерного излучателя (рис. 7).
Излучатель устанавливается по оси земляного полотна или вне его на специальном помосте, обеспечивающем установку инструмента на требуемую высоту. При установке поста лазерного излучателя вне границ земляного полотна, при возможности использования возвышений на местности, применение помоста не обязательно.
Пост лазерного излучателя располагают на границе захваток с таким расчетом, чтобы с одной стоянки обеспечить фронт работ по послойному разравниванию грунта и по планировке верха земляного полотна на участке протяженностью не более 800 м (исходя из дальности действия лазерного излучателя).
В процессе возведения насыпи после выполнения технологических операций по выгрузке и послойному разравниванию очередного слоя грунта или по планировке верха земляного полотна производят перестановку поста лазерного излучателя для выполнения работ на последующих захватках.
При возведении насыпи земляного полотна на объекте протяженностью менее 800 м используется только один пост лазерного излучателя. При этом техник-геодезист периодически производит корректировку высотного положения лазерного излучателя с целью обеспечения выполнения работ по послойной отсыпке грунта по высоте насыпи и планировке верха земляного полотна.
Рис. 7. Схема установки поста лазерного излучателя:
а - при послойной отсыпке грунта в насыпь; б - при планировке верха земляного полотна; I - захватка по послойному уплотнению грунта; II - захватка по послойной отсыпке грунта; z - направление фронта работ; 1 - место установки поста лазерного излучателя; 2 - опорная оптическая плоскость, создаваемая лучом лазера; 3 - лазерная геодезическая рейка; 4 - отсчет по лазерной рейке Dhрасч. = 280 см + Dhразр. + dср/2; 5 - отсчет по лазерной рейке Dhрасч. = 280 см + dср/2
При этом отметки опорной оптической плоскости (Н0), создаваемые лазерным лучом, должны иметь такие значения:
а) при послойной отсыпке
Но = 280 + Ноi + Dhразрыхл. + dф/2, см (1)
б) при планировке верха земляного полотна
Но = 280 + Ноп + dф/2, см (2)
где Ноi - отметка верха земляного полотна в начале и конце захватки до отсыпки последующего слоя;
Ноп - проектные отметки верха земляного полотна в начале и конце захватки;
Dhразрыхл. - толщина разравниваемого слоя в рыхлом состоянии;
280 см - конструктивное превышение фотоприемника над режущей кромкой отвала бульдозера и автогрейдера, опущенного на поверхность земли;
dф - диапазон перемещения фотоприемника из крайнего нижнего в верхнее предельное положение (25 см).
Постановка оптической плоскости в заданное положение, отвечающее требованиям формул (1) и (2), контролируются взятием отсчетов по лазерной рейке в начале и конце захватки. Корректируя положение лазерной плоскости, добиваются расчетных значений отсчетов в этих точках, которые должны соответствовать требованию:
при разравнивании
hрасч. = 280 + Dhразрыхл. + dф/2;
при планировке
hрасч. = 280 + dф/2;
Таблица 5
2.5. График выполнения работ на возведение насыпи автомобильной дороги высотой 1,5 м на захватке длиной 200 м с применением машин, оборудованных системой автоматического управления по лазерному лучу
Примечания: 1. В графу «Трудоемкость работ» включено время на отдых машинистов и технологические перерывы в размере 10 %.
2. Цифрой над линией указана продолжительность операций, под линией - число рабочих.
2.3.2.2. Разработка грунта в карьере экскаватором с погрузкой в автосамосвалы
Разработка карьера ведется продольными проходками экскаватора с боковым забоем (рис. 8). При этом автосамосвалы располагаются сбоку от экскаватора в одном уровне, что позволяет разрабатывать грунт с применением небольших углов поворота стрелы экскаватора (70 - 90°).
Рис. 8. Разработка грунта в карьере:
1 - экскаватор; 2 - автосамосвал; 3 - вешка
Наполнение ковша экскаватора с «шапкой» должно производиться за один прием «черпания». С одной стоянки экскаватора разрабатывают участок длиной 3 - 4 м, после чего экскаватор перемещают на новое место стоянки. Грунт в уровне подошвы гусениц экскаватора должен срезаться так, чтобы для передвижения машины не требовалось дополнительного выравнивания площадки.
Экскавацию грунта ведут с наименьшими затратами времени на выполнение рабочего цикла. Для этого совмещают поворот платформы с опусканием порожнего и подъемом груженого ковша. Уклон на проходках должен предотвращать приток и скопление в забое грунтовых и поверхностных вод.
2.3.2.3. Транспортировка грунта, погрузка и выгрузка его в насыпь
Грунт из карьера транспортируется автосамосвалами. Количество транспортных средств, необходимых для перевозки грунта, определяется расчетом для каждого конкретного случая с учетом фактических условий работы и дальности возки по формуле:
![]() где: (3)
где: (3)
N - искомое число автосамосвалов;
Тн - продолжительность погрузки, мин;
Тпр. - продолжительность пробега автосамосвала от места погрузки до места разгрузки и обратно, мин;
Тр - продолжительность разгрузки, мин;
Туст.п - продолжительность установки под погрузку, мин;
Туст.р - продолжительность установки под разгрузку, мин;
Тт.п. - продолжительность технологических перерывов, возникающих во время рейса, мин.
Очередной самосвал должен прибыть в забой не позднее окончания загрузки предыдущего.
Грунт транспортируется до места производства работ и выгружается на насыпи с определенными расстояниями между кучами в зависимости от толщины слоя и вместимости кузова используемого автосамосвала.
При использовании автосамосвала КрАЗ-256Б данные приведены в табл. 1.
Распределение грунта при послойной отсыпке автосамосвалами
Таблица 1
|
Толщина слоя, м |
Расстояние между кучами, м |
|
|
между центрами |
между подошвами |
|
|
0,3 |
6,5 |
3 |
|
0,6 |
«в полуприжим» (подошва откосов куч касается друг друга) |
«в полуприжим» |
|
1,0 |
«в прижим» |
«в прижим» |
2.3.2.4. Послойное разравнивание грунта в теле насыпи бульдозером
До начала послойного разравнивания грунта определяют расчетную толщину слоя (hразр.) по формуле
Dhразр. = Dhупл. ´ Кр, где: (5)
Dhупл.. - принятая толщина слоя в плотном теле;
Кр - коэффициент, учитывающий разрыхленность грунта (принимается по табл. 2 и уточняется по результатам пробного уплотнения).
Таблица 2
|
Наименование грунта |
Коэффициент уплотнения (Кр) |
|
Гравийно-галечные |
1,18 |
|
Глина сланцевая |
1,3 |
|
Лесс мягкий |
1,21 |
|
Лесс отвердевший |
1,27 |
|
Песок |
1,12 |
|
Суглинок мягкий и лессовидный |
1,2 |
|
Суглинок тяжелый |
1,28 |
|
Супесь |
1,15 |
После установки первого поста лазерного излучателя на насыпи черед началом послойного разравнивания грунта, бульдозер устанавливают на предварительно уплотненную эталонную площадку, проектные отметки которой соответствуют толщине отсыпаемого слоя (Dhразр.). Затем отвал бульдозера при помощи ручного управления опускают на поверхность эталонной площадки и в этом положении рабочего органа поднимают штангу фотоприемника с таким расчетом, чтобы достичь проекции лазерного луча на среднюю линзу фотоприемника. Сигналов попадания лазерного луча на среднюю линзу фотоприемника служит загорание лампочки на панели индикатора в месте обозначения ± 0.
Это положение фотоприемника принимается за исходное и фиксируется на шкале отметчика высоты его подъема в кабине машиниста.
Послойное разравнивание грунта в насыпи производится следующим образом: сначала производят предварительное (грубое) разравнивание отсыпаемого грунта в ручном режиме работы бульдозера. Для исключения возможности зарезания отвала бульдозера ниже заданной толщины разравниваемого слоя, а также для выдерживания допустимого уровня неровностей (± 15 - 20 см) перед окончательным разравниванием грунта, выполняемым в автоматическом режима работы бульдозера, машинист осуществляет контроль за высотным положением отвала. Информацию о положении режущей кромки отвала бульдозера относительно опорной лазерной оптической плоскости машинист получает по загоранию лампочек на панели пульта управления. При загорании верхней лампочки отвал находится ниже, а при загорании нижней - выше заданной толщины разравниваемого слоя.
Работа бульдозера в ручном режиме позволяет производить грубую планировку отсыпанного грунта без частых перегрузок двигателя и за минимальное время, т.к. при выполнении данной операции сразу в автоматическом режиме (по проектным отметкам) происходит быстрое образование призмы волочения со значительным объемом грунта, что приводит к срабатыванию датчиков перегрузки двигателя и выглублению отвала. Это вызывает необходимость разравнивания образовавшейся призмы волочения дополнительными проходами бульдозера в ручном режиме работы, что снижает эффективность применения автоматики.
После выполнения предварительной планировки производят окончательное послойное разравнивание грунта бульдозером сквозными проходами по всей длине захватки в автоматическом режиме по лазерному копиру.
Работу выполняют на второй рабочей скорости с перекрытием предыдущего слоя на 0,5 - 0,8 м.
Объем призмы грунта перед отвалом рекомендуется поддерживать в пределах 1/2 - 3/4 от наибольшего объема.
Послойное разравнивание грунта ведется по всей ширине насыпи от бровки к середине с учетом дополнительной присыпки к бровочным частям по 0,5 м для возможности послойного уплотнения откосных частей насыпи. Присыпные части после окончания отсыпки ликвидируются при планировке откосов земляного полотна. В данную технологическую карту работы по планировке откосов земляного полотна не включены.
С целью снижения затрат на разгрузку грунта и достижения минимальной величины срезки грунта, при выполнении работ по планировке верха земляного полотна и нарезке сливной призмы автогрейдером перед отсыпкой и разравниванием последнего слоя, уточняют его фактическую толщину (Dhразр.) по формуле
Dhразр. = (Hпр. - Hфакт.) × Кр, где: (5)
Нр - проектная отметка верха земляного полотна;
Нфакт. - фактическая отметка верха земляного полотна.
Скорректированные величины объемов отсыпки и толщины отсыпаемого слоя необходимо учитывать в схемах выгрузки грунта автосамосвалами и при установке высотного положения отвала бульдозера.
2.3.2.5. Послойное уплотнение грунта пневмокатком
Грунт уплотняется пневмоколесными катками послойно при оптимальной влажности последовательными продольными проходами по насыпи по всей ширине захватки.
Уплотнение грунта можно начинать после отсыпки на протяжении половины длины захватки. Первые два прохода катка (рис. 9) делают на расстояния не менее 2 м от бровки откоса, затем, смещая каждый последующий продольный проход на 1/3 ширины катка в сторону бровки откоса, прикатывают края насыпи. После этого продолжают уплотнение предельными проходами, перемещая проходы от края насыпи к ее оси с перекрытием каждого следа на 1/3 - 1/4 ширины катка и с разворотом на насыпи в конце захватки. Во время проходов вблизи бровки откоса каток не должен приближаться колесами к бровке присыпной части насыпи на расстояние ближе 0,5 м. Каждый последующий продольный проход катка по одному и тому же следу начинают после перекрытия предыдущими проходами всей ширины захватки.
Рис. 9. Технологическая схема уплотнения насыпи пневмокатками:
1 - 5 - последовательность ходов
Толщина отсыпаемых слоев грунта и расчетное количество проходов машины зависит от вида грунта, типа применяемых грунтоуплотняющих машин и требуемого коэффициента уплотнения (табл. 3) в соответствии со СНиП III-8-76.
Фактическое число проходов и рациональный режим работы грунтоуплотняющих машин устанавливается по результатам пробного уплотнения.
Зависимость толщины отсыпаемых слоев грунта от его вида, типа машин и требуемого коэффициента уплотнения при применении пневмокатков массой 25 - 30 т.
Таблица 3
|
Наибольшая толщина слоя в плотном теле, м |
Необходимое число проходов |
||||||||||
|
глина, суглинки |
супеси, пески |
глины, суглинки |
супеси, пески |
||||||||
|
Коэффициент уплотнения грунта |
|||||||||||
|
0,90 |
0,95 |
0,98 |
0,90 |
0,95 |
0,98 |
0,90 |
0,95 |
0,98 |
0,90 |
0,95 |
0,98 |
|
0,5 |
0,4 |
0,25 |
0,6 |
0,45 |
0,3 |
4 - 6 |
8 - 10 |
12 - 15 |
4 - 6 |
6 - 8 |
10 - 12 |
Первый и последний проходы катка на полосе укатки выполняют на малой скорости 2 - 2,5 км/ч, промежуточные проходы - на скорости 5 км/ч. Насыпные несвязные грунты уплотняют при давлении в шинах 2 - 4 кг/см2, а насыпные связные - при 5 - 6 кг/см2. После первых двух-трех проходов давление в шинах желательно увеличить в полтора-два раза. Технологическая схема уплотнения насыпи с применением пневмокатков показана на рис. 9.
2.3.2.6. Планировка верха земляного полотна и нарезка сливной призмы автогрейдером
До начала планировочных работ геодезической службой строительной организации должна быть произведена плановая и высотная разбивка оси и бровки земляного полотна, которая выполняется по знакам выноски проекта на местность и реперам при помощи геодезических инструментов и шаблона в соответствии с ВСН 186-75. После установки поста лазерного излучателя с целью обеспечения проектной отметки опорной оптической плоскости, необходимой для планировки верха земляного полотна, автогрейдер с фотоприемным устройством ставят в начале участка земляного полотна на предварительно подготовленную эталонную площадку (горизонтальная часть сливной призмы), затем отвал автогрейдера с помощью ручного управления опускают на поверхность площадки и в этом положении рабочего органа поднимают штангу фотоприемника до загорания лампочки на панели индикатора ± 0, фиксируют нулевое положение задатчика высоты подъемки ножа, нож автогрейдера в плане устанавливают под углом 70° к продольной оси земляного полотна и на первой скорости выполняют первую сквозную проходку на всю длину захватки.
На первой захватке место эталонной горизонтальной площадки подготавливается вручную и устраивается в начале захватки. На последующих захватках исходной позицией является конец предыдущей уже спланированной захватки.
Так как данный технологический процесс обеспечивает сооружение земляного полотна до выполнения отделочных работ с превышением проектных отметок не более 5 см, планировка верха земляного полотна и нарезка сливной призмы производится при наименьшем количестве проходок в соответствии с рис. 10 и табл. 4.
Таблица 4
|
1 |
2 |
3 |
4 |
5 |
6 |
|
|
Номера полос |
1 |
2 |
3 |
1 |
2 |
3 |
|
Толщина стружки, см |
5 |
7,5 |
7,5 |
0 |
0 |
0 |
После срезки грунта до отметок горизонтальной части призмы на отвале автогрейдера (на специальном кронштейне) устанавливается пневматическое копирное колесо, а на его опорном стержне - щуп датчика продольного профиля.
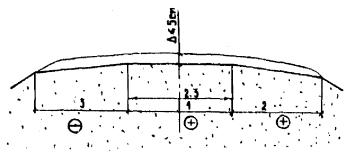
Рис. 10. Порядок прохода автогрейдера при планировке и нарезке сливной призмы:
1 - первая полоса; 2 - вторая полоса; 3 - третья полоса; + - направление рабочей проходки автогрейдера «туда»; - - то же «обратно»
Это необходимо для того, чтобы копирное колесо, перемещаясь на нарезанной ранее горизонтальной части земляного полотна, копировало его продольный профиль поверхности. Затем на шкале датчика маятникового типа, контролирующего поперечный уклон рабочего органа машины, задается поперечный уклон отвала автогрейдера, соответствующий проектной крутизне наклонной части сливной призмы. Автогрейдер располагается на предварительно подготовленной эталонной площадке в начале захватки нарезки правой или левой наклонной части сливной призмы так, чтобы край отвала находился на расстоянии 1,15 м от оси земляного полотна, а сам отвал находился на проектной отметке земляного полотна. Затем на первой скорости сквозными проходами (вторая и третья полосы) по всей длине захватки производится срезка грунта. Срезанный на насыпи грунт сбрасывается под откос. В процессе работы машинист должен направлять автогрейдер так, чтобы его переднее левое колесо двигалось по горизонтальной части сливной призмы.
Нарезка левой наклонной части сливной призмы производится так же, как и правой, только правая наклонная часть (вторая полоса) нарезается при рабочих проходках автогрейдера «туда», а левая (первая полоса) - при рабочих проходках «обратно».
После нарезки горизонтальной и наклонной части сливной призмы земляного полотна в той же последовательности производятся чистовые сквозные по всей длине захватки проходки автогрейдера. Для этого отвал автогрейдера ставится в горизонтальное (на первой полосе) или заданное наклонное (вторая и третья полосы) положение и ручным управлением опускается на земляное полотно, и в этом положении рабочего органа на первой скорости осуществляются чистовые сквозные проходки автогрейдера.
2.3.2.7. Поддержание землевозных дорог в исправном состоянии автогрейдером
Для транспортировки грунта максимально используют существующую дорожную сеть.
Устройство временных землевозных дорог и порядок поддержания их в исправном состоянии должно осуществляться в соответствии с требованиями СНиП III-8-76 и «Руководством по сооружению земляного полотна автомобильных дорог», утвержденным 17.01.80 г. Главным технические управлением Минтрансстроя.
2.3.3. Наименование и перечень глав нормативно-технической документации
При выполнении комплекса работ по возведению насыпи следует выполнять требования «Технических указаний по технологии сооружения железнодорожного земляного полотна» ВСН 186-75, М., Оргтрансстрой, 1975, СН 449-72 «Указания по проектированию земляного полотна железных и автомобильных дорог», М., Стройиздат, 1976, СНиП III-8-76, М., Стройиздат, 1977 «Руководство по организации труда при производстве строительно-монтажных работ» глава 2. «Земляные работы». М., ЦНИИСМТП, 1971.
Операционный контроль качества работ мастер осуществляет в соответствии с КОКК настоящей технологической карты.
2.4. Указания по организации труда
2.4.1. Численно-квалификационный состав бригады
Работы по отсыпке насыпи выполняет бригада в таком составе: машинист экскаватора (6 разр. - 2); помощник машиниста экскаватора (6 разр. - 2); водитель автосамосвала (3 разр. - 12); машинист бульдозера (6 разр. - 1); машинист пневмокатка (5 разр. - 1); машинист автогрейдера (6 разр. - 1); дорожный рабочий (3 разр. - 1). Для выполнения работ участок делят на захватки. Работы организуются так, чтобы грунт отсыпался автосамосвалами и разравнивался бульдозером на одной захватке, а уплотнялся пневмокатком - на другой.
Планировка верха земляного полотна и нарезка сливной призмы осуществляется автогрейдером на участке, где завершены технологические операции по послойной отсыпке земляного полотна до проектных отметок и его уплотнению.
2.4.2. Распределение операций между исполнителями внутри бригады
Машинисты экскаваторов и помощники машинистов экскаваторов разрабатывают грунт в карьере и грузят его в автосамосвалы. Водители автосамосвалов заняты на транспортировке грунта до места возведения насыпи и его отсыпки.
Машинист бульдозера производит послойное разравнивание грунта. Машинист автогрейдера занят на содержании землевозных дорог в исправном состоянии и производит работы по планировке верха земляного полотна и нарезке сливной призмы.
Машинист пневмокатка производит послойное уплотнение грунтов земляного полотна.
Дорожный рабочий под руководством техника-геодезиста производит установку поста лазерного излучателя.
Рис. 11. Расчетная схема для определения экономии балластных материалов за счет точности выполнения земляных работ автоматизированными машинами:
1 - минимальная толщина балластного слоя; 2 - балластный материал; 3 - траектория кромки отвала автогрейдера у = D × cosL; 4 - объем перерасхода балластного материала
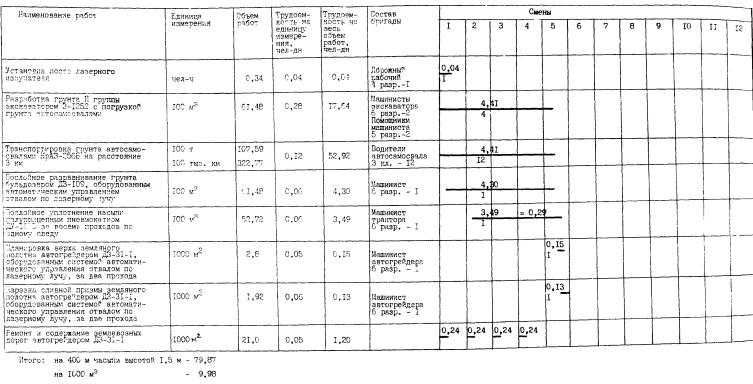
2.6. Калькуляция затрат труда и заработной платы на возведение насыпи железной дороги высотой 1,5 м с применением машин, оборудованных автоматическим управлением по лазерному лучу
Таблица 6
|
Шифр норм и числовые значения поправочных коэффициентов |
Содержание работ |
Состав звена |
Единица измерения |
На единицу измерения |
Объем работ |
На конечную продукцию |
||||
|
Норма затрат труда, чел-ч |
Расценка, руб.-коп. |
Норма времени использования машины, маш.-ч |
Нормативная трудоемкость, чел-ч |
Сумма заработной платы, руб.-коп. |
Нормативное время использования машин, чел-ч |
|||||
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
|
Местная норма |
Установка поста лазерного излучателя |
Дорожный рабочий 4 разр. - 1 |
чел-ч |
1 |
0-62,5 |
- |
0,34 |
0,34 |
0-62,5 |
- |
|
§ 2-1-8 табл. 3 № 8б |
Разработка грунта II группы экскаватором Э-1252Б с погрузкой грунта в автосамосвалы |
Машинисты экскаватора 6 разр. - 2 Помощники машиниста 5 разр. - 2 |
100 м3 |
2,3 |
1-72 |
1,15 |
64,48 |
141,4 |
105-74 |
70,70 |
|
Сборник оплаты труда работников автотранспорта § 2, 14 М. НИИтруда 1973 г. |
Простой автосамосвала КрАЗ-256Б под погрузкой и разгрузкой грунта |
Водители автосамосвала 3 кл. - 12 |
100 т |
1,25 |
0-91 |
1,25 |
107,59 |
134,43 |
97-90 |
134,48 |
|
Сборник оплаты труда работников автотранспорта § 2, 14 М. НИИтруда 1973 г. |
Транспортировка грунта автосамосвалом КрАЗ-256Б в насыпь на расстояние 3 км |
Водители автосамосвала 3 кл. - 12 |
100 т-км |
0,76 |
0-56 |
0,76 |
322,77 |
245,30 |
180-75 |
245,30 |
|
Местная норма |
Послойное разравнивание грунта бульдозером ДЗ-109А-1, оборудованным автоматическим управлением отвалом по лазерному лучу |
Машинист 6 разр.-1 |
100 м3 |
0,56 |
0-43,7 |
0,56 |
61-48 |
34-42 |
26-87 |
34-42 |
|
§ 2-1-22 табл. 8 № 2 ¸ 4г |
Послойное уплотнение насыпи полуприцепным пневмокатком ДУ-16В за восемь проходов по одному следу |
Машинист трактора 6 разр. - 1 |
То же |
0,53 |
0-42,1 |
0,53 |
52,72 |
27,94 |
22-20 |
27,94 |
|
§ 2-1-26 табл. 3 № 1д Применит. |
Планировка верха земляного полотна автогрейдером ДЗ-31-1, оборудованным системой автоматического управления отвалом по лазерному лучу за два прохода |
Машинист автогрейдера 6 разр. - 1 |
1000 м2 |
0,44 |
0-34,8 |
0,44 |
2,8 |
1,23 |
0-97 |
1,23 |
|
§ 2-1-27 табл. 2 № 1д Применит. |
Нарезка сливной призмы земляного полотна автогрейдером ДЗ-31-1, оборудованным системой автоматического управления отвалом по лазерному лучу за два прохода |
То же |
То же |
0,54 |
0-42,6 |
0,54 |
1,92 |
1,04 |
0-82 |
1,04 |
|
§ 2-1-30а № в |
Ремонт, содержание землевозных дорог автогрейдером ДЗ-31-1 |
² |
² |
0,46 |
0-36,3 |
0,46 |
21,0 |
9,66 |
7-62 |
9,66 |
|
|
Итого: |
на 400 м насыпи высотой 1,5 ч |
595,81 |
443-50 |
524,77 |
|||||
|
|
|
на 1000 м грунта |
96,91 |
74-14 |
85,36 |
|||||
2.7. Указания по технике безопасности
При возведении земляного полотна необходимо строго соблюдать требования СНиП III-4-80 «Техника безопасности в строительстве» (М. Стройиздат, 1980; ОСТ 35-10-80 М., ВПТИтрансстрой, 1981; «Типовой инструкции по охране труда для машинистов скреперов», М., Оргтрансстрой, 1974; «Типовой инструкции по охране труда для машиниста бульдозера», М., Оргтрансстрой, 1978; «Типовой инструкции по охране труда для машинистов грунтоуплотняющих машин», М., Оргтрансстрой, 1975.
При работе бульдозера необходимо соблюдать следующие требования: не поворачивать бульдозер с загруженным или заглубленным отвалом; во время остановки бульдозера отвал должен быть опущен на землю; при обнаружении во время работы каких-либо препятствий (подземные сооружения, кабели, трубопроводы) машинист должен прекратить работу и доложить об этом мастеру или прорабу; вблизи подземных сооружений и коммуникаций разрешается работать только в присутствии мастера или производителя работ; при начале движения бульдозера, изменении скорости, а также на поворотах и остановках, машинист должен подавать предупредительные звуковые сигналы; запрещается смазывать, регулировать, ремонтировать части бульдозера при его движении.
При работе катка следует соблюдать следующие требования: в процессе работы катка любого типа запрещается движение тягача задним ходом; запрещается отцеплять загруженный одноосный каток на пневматических шинах; транспортировать катки на пневматических шинах необходимо на прицепе без балласта.
При нарезке сливной призмы расстояние от бровки насыпи до колеса автогрейдера должно быть не менее 0,5 м.
Работа автогрейдера на участках с крупными камнями, мешающими нормальной работе, не разрешается до их уборки.
При развороте автогрейдера в конце захватки или участка, а также на крутых поворотах, движение должно осуществляться на минимальной скорости.
К работе на бульдозере и автогрейдере, оборудованным автоматическими системами управления рабочими органами по лазерному лучу, допускаются машинисты, прошедшие специальный курс обучения.
Перед включением системы автоматического режима управления машинами необходимо удалить посторонних лиц в зоне производства работ. При отказах срабатывания автоматических систем необходимо отключить автоматику и перейти на ручное управление.
При монтаже, демонтаже и настройке, при техническом обслуживании системы автоматики, следует пользоваться соответствующими инструкциями.
3. Технико-экономические показатели
3.1. Затраты труда на разработку 1000 м3 грунта составляют 1211 чел.-дн, затраты машинного времени на разработку 1000 м3 грунта - 10,64 маш.-см, выработка на одного рабочего в смену - 69,56 м3.
3.2. Расчет экономической эффективности от внедрения технологической карты с применением новой техники
3.2.1. Краткая характеристика эталона для сравнения
Для расчета экономической эффективности внедрения технологической карты на возведение насыпи железной дороги с применением машин, оборудованных системой автоматического управления по лазерному лучу (новая технология), сравнение произведено с применением комплекта машин без лазерной автоматики (исходный уровень). В комплект машин (исходный уровень) входят: два экскаватора ЭО-6112Б (Э-1252Б), двенадцать автосамосвалов КрАЗ-256Б, один бульдозер ДЗ-109А, один пневмокаток ДУ-16 В, один автогрейдер ДЗ-31.
В процессе возведения насыпи выполняются следующие работы: разработка грунта в карьере экскаваторами ЭО-6112Б (Э-1252Б) с погрузкой его в автосамосвалы; транспортировка грунта автосамосвалами КрАЗ-256 Б на расстояние 3 км; послойное разравнивание отсыпанного грунта бульдозером ДЗ-109А; послойное уплотнение насыпи пневмокатком ДУ-16 В; планировка верха земляного полотна и нарезка сливной призмы автогрейдером ДЗ-31; ремонт и содержание землевозных дорог автогрейдером ДЗ-31.
Новая технология уменьшает затраты на производство работ по отсыпке и уплотнению грунтов земляного полотна вследствие повышенной точности выполнения планировочных работ.
Затраты на работу пневмокатка входят в расчет экономической эффективности с учетом разности фактических объемов уплотнения грунта при новой и базовой технологии без стоимости оборудования.
В рассмотренных вариантах различие состоит в использовании при новой технологии работ бульдозера ДЗ-109А-1 и автогрейдера ДЗ-31-1, оснащенных системой автоматического управления отвалом по лазерному лучу, поэтому расчет экономической эффективности производится сравнением этих двух машин (с использованием лазерной автоматики и без нее).
3.2.2. Исходные данные
Таблица 7
|
Наименование показателей |
Возведение насыпи комплектом машин, необорудованных системой автоматического управления (исходный уровень) |
Возведение насыпи комплектом машин с применением бульдозера ДЗ 109А-1 и автогрейдера ДЗ-31-1, оборудованных системой автоматического управления по лазерному лучу (новая технология) |
|
1 |
2 |
3 |
|
Годовой объем внедрения, 100 м3 |
3230 |
3750 |
|
Стоимость оборудования, руб. |
29346 |
38326 |
|
Показатели на 100 м3 грунта |
|
|
|
Прямые затраты, руб. |
11,99 |
7,34 |
|
в том числе: |
|
|
|
а) основная заработная плата рабочих, руб. |
2,06 |
1,21 |
|
б) стоимость эксплуатации машин и механизмов, руб. |
9,93 |
6,13 |
|
Накладные расходы, руб., зависящие от: |
0,51 |
0,30 |
|
а) трудоемкости |
0,20 |
0,12 |
|
б) величины заработной платы |
0,31 |
0,18 |
|
Итого: Себестоимость, руб. |
12,50 |
7,64 |
|
Трудоемкость работ, чел.-дн |
0,33 |
0,19 |
|
Удельные капитальные затраты, руб. |
ºº9,09 |
10,22 |
Экономический эффект от внедрения технологической карты определен по формуле:
Э = А × [(C1 - С2) + Ен(К1 - К2)];
Э = 3750 × [(12,50 - 7,64) + 0,15(9,09 - 10622)] = 17625 руб.
3.2.3. Пояснения к расчету
3.2.3.1. Прямые затраты
3.2.3.1.1. Основная заработная плата рабочих определена по калькуляции затрат труда, составленной на основании ЕНиР, сборник 2, выпуск 1.
3.2.3.1.2. Стоимость эксплуатации машин и механизмов
Количество маш.-смен на разработку грунта определено на основании ЕНиР, сборник 2, выпуск 1. Цена маш.-смен определена на основании Ценника № 2 с пересчетом, исходя из продолжительности восьмичасового рабочего дня.
3.2.3.2. Накладные расходы
3.2.3.2.1. Накладные расходы, зависящие от трудоемкости работ, составляют 0,6 руб. на 1 чел.-дн.
Трудоемкость работ на 100 м3 грунта составляет 0,33 чел.-дн. (исходный уровень) и 0,19 чел.-дн. (новая технология).
В соответствии с этим накладные расходы, зависящие от трудоемкости работ, составили: исходный уровень - 0,33 ´ 0,6 = 0,20 руб.; новая технология - 0,19 ´ 0,6 = 0,12 руб.
3.2.3.2.2. Накладные расходы, зависящие от величины заработной платы, составляют 15 % от основной заработной платы рабочих: исходный уровень - 2,06 ´ 0,15 = 0,31 руб.; новая технология - 1,21 ´ 0,15 = 0,18 руб.
3.2.3.3. Удельные капитальные затраты
Таблица 8
Балансовая стоимость оборудования
|
Наименование машин и механизмов |
Стоимость единицы, руб. |
Количество, шт. |
Сумма, руб. |
|
1 |
2 |
3 |
4 |
|
Бульдозер ДЗ-109А-1, оборудованный автоматическим управлением отвалом по лазерному лучу |
23190 |
1 |
23190 |
|
Автогрейдер ДЗ-31-1, оборудованный системой автоматического управления отвалом по лазерному лучу |
15136 |
1 |
15136 |
|
Итого: |
|
|
38326 |
|
Бульдозер ДЗ-109 |
18700 |
1 |
18700 |
|
Автогрейдер ДЗ-31-1 |
10646 |
1 |
10646 |
|
Итого: |
|
|
29346 |
Путем деления балансовой стоимости оборудования на годовую производительность, получаем капитальные затраты на 100 м3 грунта (удельные капитальные затраты), которые будут равны:
К1 = 29346 / 3230 = 9,09 руб.; К2 = 38326 / 3750 = 10,22 руб.
Таблица 9
Затраты маш.-смен и их стоимость на разработку 100 м3 грунта
|
Наименование машин |
Цена маш.-смен, руб. |
Количество маш.-смен |
Стоимость эксплуатации машин, руб. |
|
1 |
2 |
3 |
4 |
|
Бульдозер ДЗ-109А-1, оборудованный системой автоматического управления отвалом по лазерному лучу |
39,78 |
0,070 |
2,78 |
|
Автогрейдер ДЗ-31-1, оборудованный системой автоматического управления отвалом по лазерному лучу |
27,37 |
0,122 |
3,25 |
|
Итого: |
|
|
6,13 |
|
Бульдозер ДЗ-109 |
39,78 |
0,081 |
3,23 |
|
Автогрейдер ДЗ-31 |
27,37 |
0,245 |
6,70 |
|
Итого: |
|
|
9,93 |
3.2.4. Экономия балластного материала
3.2.4.1. Предпосылки и исходные данные для расчета экономии балластного материала
Расчетная схема для определения экономии балластного материала приведена на рис. 11.
Траектория режущей кромки отвала автогрейдера принята по закону cos.
Точность при планировке верха земляного полотна автогрейдера, оснащенного лазерной автоматической системой управления отвалом, достигается при D = ± 1 см, вместо D = ± 5 см, согласно ВСН-186-75. Так как уменьшение балластного слоя под подошвой согласно СНиП III-38-75 не допускается, то минимальная толщина балластного слоя должна соответствовать максимальным отметкам земляного полотна.
3.4.2. Расчет экономии балластного материала
Перерасход балластного материала на 1 км пути определяется по формуле: У = D × В × L м3, где: В - ширина балластной призмы по низу, м (при двухслойной конструкции балластной призмы для железнодорожной линии первой категории при однопутном земляном полотне В = 4,5 м); L - длина участка, м. Учитывая, что разность точностей выполнения планировочных работ автогрейдером без системы автоматики составляет ± 4 см, экономия балластного материала на 1 км пути будет равна: У = 0,04 × 4,5 × 1000 = 180 м3.
4. Материально-технические ресурсы
4.1. Потребность в эксплуатационных горюче-смазочных материалах (ГСМ)
Таблица 10
|
Наименование ГСМ |
ГОСТ |
Количество, кг |
|||||||||||
|
Исходный уровень |
Новая технология |
||||||||||||
|
Экскаватор Э-1252Б |
Автосамосвал КрАЗ-256Б |
Бульдозер ДЗ-109 |
Пневмокаток ДУ-16В |
Автогрейдер ДЗ-31 |
Итого |
Экскаватор Э-1252Б |
Автосамосвал КрАЗ-256Б |
Бульдозер ДЗ-109А-1 |
Пневмокаток ДУ-16В |
Автогрейдер ДЗ-31-1 |
Итого |
||
|
Дизельное топливо |
1667-68 |
9,0 636 |
6,06 2301 |
7,5 300 |
15,0 441 |
6,0 85 |
41,76 3763 |
9,0 636 |
6,06 2301 |
7,5 258 |
15,0 419 |
6,0 72 |
41,76 3686 |
|
Бензин |
2084-77 |
0,27 19 |
0,18 69 |
0,22 9 |
0,45 13 |
0,18 3 |
1,25 113 |
0,27 19 |
0,18 69 |
0,22 8 |
0,45 13 |
0,18 2 |
1,25 111 |
|
Моторное масло |
8581-78 |
0,45 32 |
0,30 115 |
0,37 15 |
0,75 22 |
0,30 4 |
2,08 118 |
0,45 32 |
0,30 115 |
0,37 13 |
0,75 21 |
0,30 4 |
2,08 184 |
|
Трансмиссионное масло |
23652-79 |
0,09 6 |
0,06 23 |
0,07 3 |
0,15 4 |
0,06 0,9 |
0,42 38 |
0,09 6 |
0,06 23 |
0,07 3 |
0,15 4 |
0,06 0,7 |
0,42 37 |
|
Консистентная смазка |
1033-79 |
0,14 10 |
0,09 35 |
0,11 5 |
0,23 7 |
0,09 1 |
0,63 57 |
0,14 10 |
0,09 35 |
0,11 4 |
0,23 6 |
0,09 1 |
0,63 55 |
Примечание: В числителе указан расход ГСМ на 1 маш.-ч работы, в знаменателе - расход на полный объем работ - 6148 м3.
Экономия ГСМ при применении новой технологии на возведение насыпи высотой 1,5 м на захватке 400 м составила: дизельного топлива - 77 кг; бензина - 2 кг; моторного масла - 4 кг; трансмиссионного масла - 1 кг; консистентной смазки - 2 кг.
4.2. Потребность в машинах
Таблица 11
|
Наименование |
Тип, марка |
Количество, шт. |
|
Экскаватор |
Э-1252Б |
2 |
|
Автосамосвал |
КрАЗ-256Б |
12 |
|
Бульдозер |
ДЗ-109А-1 |
1 |
|
Пневмокаток |
ДУ-16В |
1 |
|
Автогрейдер |
ДЗ-31-1 |
1 |
|
Лазерный излучатель |
ОТК-13 |
2 |
Приложение
Рекомендации по эксплуатации аппаратуры «Копир-Автоплан-10»
1. Маркировка
1.1. В соответствии с требованиями комплекта конструкторской документации должна быть написана маркировка: товарный знак предприятия-изготовителя; наименование; год выпуска и номер системы.
1.2. Качество выполнения маркировки должно обеспечивать четкое и целое изображение в течение срока службы аппаратуры.
1.3. Маркировка транспортной тары должна соответствовать требованиям комплектов конструкторской документации на систему.
2. Упаковка
2.1. Упаковка системы должна производиться в закрытых помещения при температуре окружающего воздуха от 15 до 40 °С и относительной влажности до 80 % (при отсутствии в окружающей среде агрессивных примесей).
2.2. Консервация металлических деталей системы должна производиться по ГОСТ 13168-69.
2.3. Способ консервации и упаковки системы должен обеспечивать их сохранность при транспортировании и хранении в пределах установленного гарантийного срока.
3. Требования безопасности
3.1. Видов и источников опасности система не имеет. Особых требований безопасности к системе не предъявляется.
4. Установка и настройка системы автоматики осуществляется в соответствии с инструкцией завода-изготовителя.
5. Техническое обслуживание
При отклонении датчиков от пульта управления, во избежание попадания влаги и грязи, необходимо плотно завинчивать штепсельные колпачки.
На пульт управления, датчики и штеккеры не должны попадать прямые струи воды или пара. Необходимо периодически проверять крепления датчиков, устройства перемещения, пульта управления и блока перегрузки. При необходимости нужно подтягивать болты крепления, проверять установку датчиков (см. п. 8, 9).
При больших переездах с одной стройплощадки на другую, а также при длительных работах без применения автоматики, рекомендуется во избежание повреждений снять датчик ДКБ и устройство перемещения ФПУ и убрать в ящик для ЗИПа.
5.1. Виды и периодичность технического обслуживания
Принята планово-предупредительная система, предусматривающая ежемесячное техническое обслуживание (ЕО) и сезонное (1 раз в год зимой).
Техническому обслуживанию подвергаются все элементы системы автоматического управления (САУ) по перечню работ, изложенному в настоящей инструкции.
5.2. Перечень работ по техническому обслуживанию
Таблица 12
5.2.1. Порядок проведения ежемесячного обслуживания
|
Содержание работ |
Примечание |
|
1. Проверить наружным осмотром состояние узлов САУ «Копир-Автоплан-10», обратив особое внимание на ЗСУ-5, датчики ДКБ и КВД-25, устройство перемещения ФПУ |
Штепсельные разъемы должны быть затянуты до предела Изоляция проводов не должна иметь никаких повреждений Кнопки толкателей управляющего золотника (пилота) должны свободно перемещаться от нажатия пальцем Датчики должны быть надежно закреплены Тросик датчика обратной связи должен быть надежно закреплен на штоке устройства перемещения |
|
2. Проверить работу САУ при работающем двигателе |
|
|
2.1. Установить переключатель режима работы в положение ДКБ (влево), задатчик установить в положение ± 5 % по шкале, включить тумблер питания |
Штоки обоих гидроцилиндров отвала бульдозера должны перемещаться в соответствии с загоранием индикаторных лампочек на пульте управления (вверх или вниз, в соответствии с заданным уклоном) |
|
2.2. Установить переключатель в положение ФПУ (вправо), задатчик установить поочередно в положение 10 см, включить тумблер питания |
Шток устройства перемещения должен перемещаться в соответствии с заданным положением на 10 см вверх и на 5 см вниз |
|
2.3. Установить переключатель режима работы в положение ДКБ (влево), включить тумблеры «питание» и «перегрузка», обороты двигателя установить - 700 об/мин |
Отвал бульдозера должен подниматься (ступенчато) вверх (при 700 об./мин) и опускаться вниз в исходное заданное положение (при 800 об./мин) |
|
3. В конце смены отключить тумблер питания |
|
|
4. Тщательно очистить от грязи все узлы САУ |
|
Таблица 13
5.2.2. Порядок проведения сезонного обслуживания
|
Описание работ |
Примечание |
|
1 |
2 |
|
1. Тщательно очистить от грязи все узлы аппаратуры |
|
|
2. Датчик углового перемещения ДКБ |
|
|
2.1. Отсоединить штепсельный разъем, отвернуть болты крепления и снять датчик |
|
|
2.2. Отвернуть крышку, извлечь патрон с селикагелем |
Селикагель просушить |
|
2.3. Вымыть датчик ДКБ снаружи бензином и протереть ветошью |
Мыть следует несколько раз и протирать ветошью |
|
2.4. Проверить датчик; для этого датчик установить штепсельным разъемом вверх, подать питание (12 В), подключить прибор (вольтметр) к штырям штепсельного разъема; поворачивать датчик влево и вправо до крайнего (фиксированного) положения чувствительного элемента и следить за показаниями приборов |
При повороте датчика влево и вправо стрелка прибора должна плавно (без скачков) перемещаться по шкале |
|
2.5. Снять кожух ДКБ и смазать согласно табл. 3 |
Соблюдать осторожность, чтобы не повредить преобразователь |
|
2.6. Одеть кожух ДКБ и закрепить. Поставить датчик на место и закрепить при помощи болтов |
Выставлять датчик согласно п. 7 настоящего паспорта |
|
3. Устройство перемещения ФПУ |
|
|
3.1. Отсоединить штепсельный разъем, отвернуть болты крепления и снять устройство перемещения и промыть бензином или соляркой |
После промывки протереть ветошью |
|
3.2. Проверить неисправность устройства перемещения. Для этого положить его штепсельным разъемом вверх, подать питание 12 В (на штырьки штепсельного разъема). При перемене полярности напряжения, подающегося на штырьки, электродвигатель должен менять направление своего вращения |
При изменении полярности подаваемого напряжения шток устройства перемещения должен менять направление своего движения вверх или вниз |
|
3.3. Поставить устройство перемещения ФПУ на место и закрепить при помощи болтов |
Регулировать работу устройства перемещения ФПУ согласно п. 7 настоящего паспорта |
|
4. Обслуживание гидрораспределителя производится по инструкции на гидрораспределитель ЗСУ-5 |
|
Таблица 14
Указания по смазке датчика ДКБ
|
Места смазки датчика ДКБ |
Число точек смазки |
Смазочные материалы |
Примечание |
|
Шарикоподшипники оси маятника в ДКБ |
1 |
Масло приборное МВП ГОСТ 1805-76 |
Капельная масленка. При смазке покачивают чувствительный элемент (маятник) |
6. Возможные неисправности и их устранение
При выходе из строя системы автоматического управления рекомендуется сначала проверить кабельную сеть (прозвонить провода), а также убедиться в отсутствии механических повреждений аппаратуры.
Ремонт аппаратуры и проверка соответствия ее технических параметров паспортным данным должны производиться только специалистом и в специальном закрытом перемещении.
Основные виды неисправностей, способы их обнаружения и устранения приведены в табл. 15.
Таблица 15
Ведомость неисправностей и способы их устранения
|
Вид неисправности |
Причина |
Способ устранения |
|
1 |
2 |
3 |
|
1. Не горят индикаторные лампы (переключатель режима работы повернут влево, тумблер питания включен, ручка задатчика повернута в положение +5 %), штепсельный разъем исполнительного механизма отвала отключен от пульта управления |
Сгорели предохранители (1А, 3А) |
Проверить кабельную проводку и электромагнит гидрораспределителя на короткое замыкание, устранить повреждения (по возможности) и заменить предохранители |
|
Перегорели индикаторные лампочки |
Проверить, в случае неисправности заменить |
|
|
Вышло из строя сравнивающее устройство или усилитель канала стабилизации |
Проверить выходные сигналы сравнивающего устройства и выходные сигналы с транзисторов усилителя, заменить СУ или транзистор усилителя. По возможности отремонтировать СУ |
|
|
2. При положении переключателя и тумблера питания согласно п. 1 таблицы и установке задатчика в среднее положение (на 0 %) горит индикаторная лампочка на пульте управления |
Нарушена установка датчика ДКБ |
Проверить и установить датчик согласно п. 7 |
|
3. При положении переключателя и тумблера питания согласно п. 11 таблицы и перемещения ручки задатчика в любое положение постоянно горит одна индикаторная лампочка накала |
Отсутствие одного из сигналов (с датчика или задатчика) |
Проверить правильность внешних соединений |
|
Вышел из строя датчик ДКБ |
Датчик подлежит замене |
|
|
Вышел из строя задатчик |
Задатчик подлежит замене |
|
|
Вышло из строя сравнивающее устройство |
Заменить сравнивающее устройство |
|
|
4. При положении переключателя и тумблера питания согласно п. 1 таблицы, при соединении разъема исполнительных механизмов к пульту управления и установке ручки задатчика в положение отвала на «подъем» (опускание), отвал движется вниз (вверх) |
Неправильная коммутация внешних соединений с электроуправляемым гидрораспределителем (исполнительным механизмом гидропривода ковша) |
Взаимно переставить провода на клеммах гидрораспределителя |
|
Неправильно установлен датчик ДКБ |
|
|
|
5. При положении ручек на пульте управления и внешних соединений соответственно п. 4 таблицы отвал остается неподвижным (индикаторные лампочки загораются) |
Не срабатывает электроуправляемый гидрораспределитель |
Заклинило плунжер управляющего или основного золотника. Нажать на контрольные кнопки на электромагнитах золотника. Если ковш не перемещается, то надо снять боковую крышку (отвернуть четыре болта) основного золотника и сдвинуть (нажать) с места плунжер, крышку снова закрыть и затянуть болты. Если это не помогает, заменить гидрораспределитель |
|
6. Индикаторная лампочка «перегрузка» все время мигает (включены тумблеры «питание» и «перегрузка»); отвал поднимается при максимальных оборотах двигателя |
Напряжение, снимаемое с тахогенератора (ТГ-ТЭ-45), не подается в схему управления |
Проверить кабельную проводку и правильность внешних соединений на обрыв, устранить повреждение Проверить выходной сигнал (напряжение) с тахогенератора, заменить вышедший из строя ТГ Проверить выходной сигнал (напряжение) с плиты выпрямителя ВН, если нельзя отремонтировать, заменить выпрямитель |
|
7. Электродвигатель устройства перемещения не вращается, шток не перемещается (переключатель режима работы повернуть вправо, включен тумблер «питание») |
См. п. 1 |
Проверить кабельную проводку внешних соединений и электродвигатель на короткое замыкание: устранить неисправность (по возможности) и заменить предохранители |
|
См. п. 1 |
См. п. 1 |
|
|
Вышло из строя реле, коммутирующее обмотку электродвигателя |
Проверить контакты реле, если не удастся отремонтировать, заменить реле Р6 и Р7 |
|
|
Вышел из строя электродвигатель |
Проверить обмотку электродвигателя, заменить электродвигатель |
|
|
Вышел из строя переключатель |
Проверить контакты переключателя, если не удастся отремонтировать, заменить переключатель В2 |
7. Правила хранения и консервации
Хранение аппаратуры должно производиться в закрытых складских помещениях в нераспакованном виде, в положении, определяемом знаком «верх». Допускается укладка ящиков с аппаратурой не более, чем в четыре яруса.
Хранение аппаратуры в одном помещении с кислотами, реактивами и другими материалами, которые могут оказывать вредное воздействие на нее, не допускается. После хранения при отрицательных температурах, перед распаковкой и расконсервацией, аппаратура должна быть выдержана при нормальной температуре помещения не менее 6 ч.