ФЕДЕРАЛЬНОЕ АГЕНТСТВО ПО ТЕХНИЧЕСКОМУ РЕГУЛИРОВАНИЮ И МЕТРОЛОГИИ
|
|
НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ |
ГОСТ Р 51901.14-2005 |

Менеджмент риска
МЕТОД СТРУКТУРНОЙ СХЕМЫ НАДЕЖНОСТИ
IEC 61078:1991
Analysis techniques for dependability-Reliability block diagram method (MOD)
![]()
Москва
Стандартинформ
2005
Предисловие
Задачи, основные принципы и правила проведения работ по государственной стандартизации Российской Федерации установлены ГОСТ Р 1.0-92 «Государственная система стандартизации Российской Федерации. Основные положения» и ГОСТ Р 1.2-92 «Государственная система стандартизации Российской Федерации. Порядок разработки государственных стандартов»
Сведения о стандарте
1. ПОДГОТОВЛЕН Научно-исследовательским центром контроля и диагностики технических систем на основе собственного аутентичного перевода стандарта, указанного в пункте 4
2. ВНЕСЕН Научно-техническим управлением Госстандарта России
3. УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Приказом Федерального агентства по техническому регулированию и метрологии от 31 мая 2005 г. № 110-ст
4. Настоящий стандарт является модифицированным по отношению к международному стандарту МЭК 61078:1991 «Методы анализа надежности. Метод структурной схемы надежности» (IEC 61078:1991 «Analysis techniques for dependability - Reliability block diagram method») путем внесения технических отклонений, объяснение которых приведено во введении к настоящему стандарту.
Наименование настоящего стандарта изменено относительно наименования указанного международного стандарта для приведения в соответствие с ГОСТ Р 1.5 (подраздел 3.6).
Изменения, введенные в настоящий стандарт по отношению к международному стандарту, обусловлены необходимостью наиболее полного достижения целей национальной стандартизации
5 ВВЕДЕН ВПЕРВЫЕ
Информация об изменениях к настоящему стандарту публикуется в указателе «Национальные стандарты», а текст этих изменений - в информационных указателях «Национальные стандарты». В случае пересмотра или отмены настоящего стандарта соответствующая информация будет опубликована в информационном указателе «Национальные стандарты»
Введение
Метод структурной схемы надежности является одним из методов, часто используемых при анализе рисков технических и технологических систем. Общие принципы оценки риска технологических систем регламентированы ГОСТ Р 51901-2002 «Управление надежностью. Анализ риска технологических систем». Метод позволяет строить модели технической и технологической систем и оценивать вероятности возможных благоприятных и неблагоприятных событий.
Метод структурной схемы надежности применяется также в различных аналитических методах исследования надежности. При этом цели каждого применяемого метода, их пригодность (индивидуальная или в сочетании с другими методами) для оценки надежности и работоспособности данной системы или компонента должны исследоваться аналитиком до начала применения метода структурной схемы надежности. Необходимо также учитывать результаты, полученные каждым методом, необходимые для анализа данные, сложность анализа и другие факторы.
В отличие от применяемого международного стандарта, в настоящий стандарт не включена ссылка на МЭК 60050 (191): 1990 «Международный электротехнический словарь. Глава 191. Надежность и качество обслуживания», которую нецелесообразно применять в национальном стандарте из-за отсутствия гармонизированного национального стандарта. В соответствии с этим изменено содержание раздела 3.
Содержание
НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
|
Менеджмент риска МЕТОД СТРУКТУРНОЙ СХЕМЫ НАДЕЖНОСТИ Risk management. Reliability block diagram method |
Дата введения - 2005-09-01
1 Область применения
Настоящий стандарт устанавливает процедуры моделирования надежности технической и технологической систем (далее - систем) и использования этой модели для оценки характеристик безотказности и работоспособности систем.
Необходимые расчетные формулы приведены в приложении В.
2 Нормативные ссылки
В настоящем стандарте использована нормативная ссылка на следующий стандарт: ГОСТ 27.002-89 Надежность в технике. Основные понятия. Термины и определения
Примечание: При пользовании настоящим стандартом целесообразно проверить действие ссылочного стандарта по указателю «Национальные стандарты», составленному по состоянию на 1 января текущего года, и по соответствующим информационным указателям, опубликованным в текущем году. Если ссылочный документ заменен (изменен), то при пользовании настоящим стандартом следует руководствоваться замененным (измененным) стандартом. Если ссылочный документ отменен без замены, то положение, в котором дана ссылка на него, применяют в части, не затрагивающей эту ссылку.
3 Термины и определения
В настоящем стандарте применены термины по ГОСТ 27.002.
4 Символы и обозначения
Используемые в настоящем стандарте символы и обозначения приведены в приложении А.
5 Условия применения
Структурная схема надежности является наглядным представлением надежности системы. Она показывает логическую связь компонентов, необходимую для работы системы.
Описанные методы построения структурной схемы надежности предназначены для применения прежде всего к системам без восстановления и системам, в которых порядок появления отказов не имеет значения. Для систем, порядок отказов в которых должен приниматься во внимание, или систем с восстановлением применяют другие методы моделирования надежности системы, например Марковский анализ. Предполагается, что в любой момент времени элемент системы может находиться только в одном из двух возможных состояний: исправном или неисправном.
В символическом представлении не делают различий между открытой и замкнутой схемой или другими моделями отказов, но при определении количественной оценки эти различия необходимо указывать.
6 Требования надежности и определение отказа системы
6.1 Общие положения
Предпосылкой для построения моделей надежности системы явилось изображение путей сигнала, обеспечивающих работоспособность системы. Часто требуется более одного определения отказа системы. Отказы системы должны быть определены и перечислены.
Кроме того, необходимы четкие инструкции относительно:
- функций, выполняемых системой;
- параметров эффективности и допустимых границ изменения этих параметров;
- режимов эксплуатации системы и условий окружающей среды.
При построении структурной схемы надежности могут использоваться различные методы количественного анализа. Поэтому необходимо дать четкое определение отказа системы. Работоспособность системы зависит от одного или нескольких отказов системы. Для каждого определения отказа системы следующим шагом является деление системы на логические блоки в соответствии с целями анализа надежности. Отдельные логические блоки могут представлять собой подсистемы, каждая из которых, в свою очередь, может быть представлена своей структурной схемой надежности.
Количественный анализ структурной схемы надежности проводят различными методами. В зависимости от типа структурной схемы могут использоваться простые Булевы методы и/или анализ множества соединений и прерываний. Вычисления проводят на основе данных надежности основных компонент.
Необходимо заметить, что структурная схема надежности необязательно отражает физические связи аппаратных средств
6.2 Эксплуатация системы
Может оказаться возможным использование системы для более чем одного режима функционирования. Если для каждого режима используются отдельные системы, такие режимы должны обрабатываться независимо от остальных. При этом соответственно должны использоваться самостоятельные модели надежности. Если одна и та же система предназначена для выполнения всех функций, то для каждого типа операций должны использоваться отдельные структурные схемы надежности. Четкие требования надежности, связанные с каждым аспектом функционирования системы, являются необходимой предпосылкой составления структурной схемы надежности.
6.3 Условия окружающей среды
Спецификации на параметры системы должны включать описание условий окружающей среды, предусмотренных проектом для работы системы. Они должны включать описание условий, которым система будет подвергаться в процессе транспортирования, хранения и эксплуатации.
Некоторое оборудование предназначено для использования в различных условиях, например на борту корабля, самолета или на суше. В этом случае оценки надежности могут быть выполнены на основе одной и той же структурной схемы надежности, но с применением интенсивностей отказов, соответствующих конкретным условиям эксплуатации.
6.4 Цикл работы
Должна быть установлена взаимосвязь между календарным временем работы и циклами процессов включения-выключения системы. Если процессы включения и выключения оборудования не вызывают отказ системы, а интенсивность отказов оборудования при хранении незначительна, то необходимо рассматривать только фактическое время работы оборудования.
В некоторых случаях процессы включения и выключения являются главной причиной отказов работы оборудования. Кроме того, оборудование может иметь более высокую интенсивность отказов при хранении, чем при эксплуатации. В сложных случаях, когда включаются и выключаются только части системы, допускаются другие методы (например Марковский анализ).
7 Простые модели
7.1 Разработка модели
При разработке модели системы сначала необходимо дать определение работоспособного состояния системы. Если возможно более одного определения, то для каждого определения может потребоваться отдельная структурная схема надежности. Затем необходимо разделить систему на блоки так, чтобы определить логику их взаимодействия в системе. При этом каждый блок должен быть статистически независимым и максимально большим. В то же время каждый блок не должен содержать (по возможности) резервирования. Для простоты числовой оценки каждый блок должен содержать только такие элементы, которые соответствуют одному и тому же статистическому распределению наработок до отказа.
На практике могут понадобиться повторные попытки построения структурной схемы (в соответствии с вышеуказанными требованиями) прежде, чем будет построена окончательная структурная схема надежности.
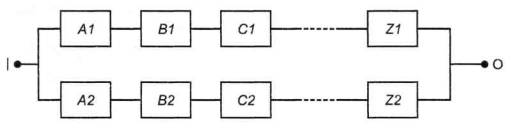
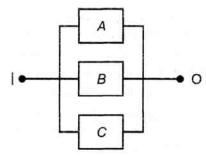
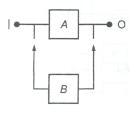
Затем, используя определение отказа системы, строят структурную схему, в которой подключение блоков формирует «путь успеха» системы. Как указано в структурных схемах, приведенных на рисунках 1-4, различные пути между портами ввода и вывода проходят через такие комбинации блоков, которые должны обеспечивать функционирование системы. Если для функционирования системы требуется, чтобы функционировали все блоки, то соответствующей структурной схемой является такая схема, в которой все блоки соединены последовательно, как показано на рисунке 1.

½ - входной порт, О - порт вывода; А, В, С, Z- блоки системы
Структурные схемы этого типа называются последовательными структурными схемами надежности.
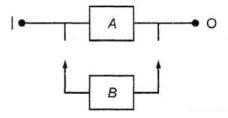
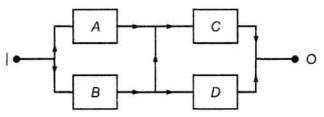
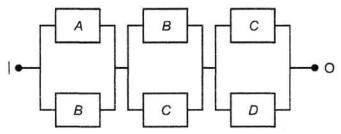
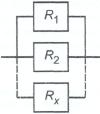
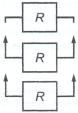
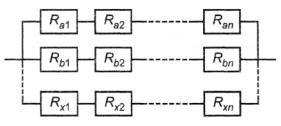
Другой тип структурной схемы применяют в случае, когда отказ одного компонента или блока не влияет на работоспособность системы в соответствии с определением отказа системы. Если в этом случае вся цепочка дублирована, то структурная схема имеет вид, показанный на рисунке 2. Если дублирован каждый блок в цепочке, структурная схема имеет вид, показанный на рисунке 3.
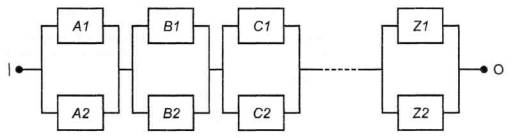
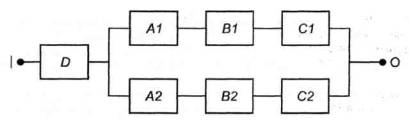
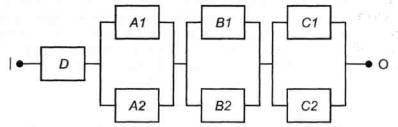
Структурные схемы этого типа называются параллельными структурными схемами надежности. Структурные схемы, используемые для описания надежности системы, часто являются комбинацией последовательных и параллельных соединений. Такие структурные схемы можно построить, если рассмотреть систему, состоящую из дублированной цепочки, включающей три повторяющихся элемента А, В и С и общий элемент питания D. Итоговые структурные схемы представлены на рисунках 4 и 5.
Из-за статистической независимости отказ любого блока не должен повышать вероятность отказа любого другого блока системы. В частности, отказ дублированного блока не должен влиять на работу источников питания и источников сигнала системы.
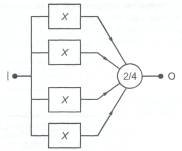
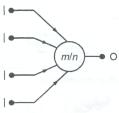
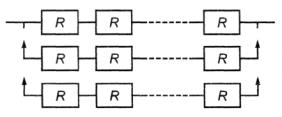
На практике встречаются системы, для работы которой необходимо функционирование т или более из п элементов, соединенных параллельно. Структурная схема такой системы имеет вид, показанный на рисунках 6, 7.
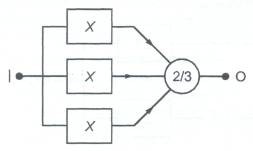
Таким образом, структурная схема, изображенная на рисунке 6, для работы системы допускает отказ не более одного элемента.
Большинство структурных схем надежности легко понятны, а требования к работе системы - очевидны. Однако не все структурные схемы являются комбинациями последовательных или параллельных систем.
Пример такой структурной схемы представлен на рисунке 8.
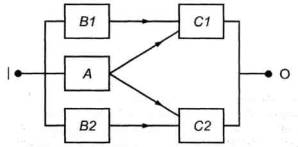
Представленная структурная схема достаточно простая. Система находится в рабочем состоянии, если одновременно работают элементы В1 и С1 или А и С1, или А и С2, или В2 и С2. Работы элементов В1 и С2 или В2 и С2 недостаточно для работы системы. Рисунок 8 можно интерпретировать как систему подачи топлива на двигатели легкого самолета. Элемент В1 представляет поставку топлива на двигатель левого борта С1, элемент В2 - поставку топлива на двигатель правого борта С2, а элемент А - резервную поставку на оба двигателя. Системное определение отказа - должны отказать оба двигателя самолета.
Необходимо заметить, что на всех приведенных на рисунках 1-8 структурных схемах ни один блок не появляется более одного раза. Процедуры построения формул для определения вероятности безотказной работы структурных схем таких типов приведены в разделе 8.
7.2 Оценка вероятности безотказной работы
Вероятность безотказной работы (далее - ВБР) системы RS(t) - это вероятность того, что система может исполнять требуемую функцию в данных условиях для данного интервала времени (0, t). В общем случае ВБР определяют по формуле
 ,
,
где ![]() -
интенсивность отказов системы в момент времени t = и. Для
простоты RS(t) будем записывать как RS.
-
интенсивность отказов системы в момент времени t = и. Для
простоты RS(t) будем записывать как RS.
Вероятность отказа системы FS определяют по формуле
FS = 1 - RS
7.2.1 Последовательные модели
Для систем, схема которых изображена на рисунке 1, ВБР системы RS определяют по формуле
то есть ВБР системы является произведением ВБР всех блоков, входящих в систему.
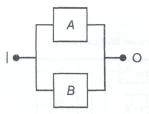
7.2.2 Параллельные модели
Для систем, схема которых изображена на рисунке 9, вероятность отказа системы FS определяют по формуле
FS=FAFB
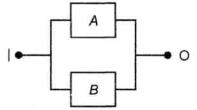
Рисунок 9
Следовательно ВБР системы RS вычисляют по формуле
RS = RA + RB – RB, (2)
Формулы (1) и (2) могут быть объединены. Для системы, схема которой изображена на рисунке 2, но имеет три элемента в каждой ветке, ВБР системы определяют по формуле
RS = RA1RB1RC1 + RA2RB2RC2 - RA1RB1RC1RA2RB2RC2, (3)
Аналогично для системы, изображенной на рисунке 3, ВБР системы определяют по формуле
RS = (RA1 + RA2 - RA1RA2)(RB1 + RB2 - RB1RB2)(RC1 + RC2 - RC1RC2), (4)
Для систем, схемы которых изображены на рисунках 4 и 5, формулы для ВБР системы получают умножением выражений (3) и (4) на RD.
7.2.3 Модели т из п (идентичные элементы)
Если система представляет собой параллельное соединение п идентичных элементов, а для ее работоспособности требуется исправность т элементов из п, то ВБР системы RS вычисляют по формуле
Таким образом, ВБР системы, схема которой изображена на рисунке 6, вычисляют по формуле
RS = R3 + 3R2(1 - R)=3R2 - 2R3, (6)
где R - ВБР отдельных элементов.
Аналогично для системы, структурная схема надежности которой изображена на рисунке 7, ВБР определяют по формуле
RS = R4 + 4R3(1 - R) + 6R2(1 - R) 2 = 3R4 - 8R3 + 6R2, (7)
Если не все элементы п системы идентичны, то для определения ВБР рекомендуется использовать более общие процедуры, приведенные в 8.3.
7.2.4 Модели с недогруженным резервом
Другая часто используемая форма резервирования - ненагруженный резерв. В наиболее простом случае структурная схема надежности системы с ненагруженным резервом изображена на рисунке 10.
А - сетевой активный элемент; В - элемент, находящийся в режиме ожидания и включающийся в случае отказа элемента А
Рисунок 10
Формулы (1) - (4) не допускается применять для анализа надежности систем с ненагруженным резервом. Если при эксплуатации оба элемента имеют постоянную интенсивность отказа и при резервировании имеют нулевую интенсивность отказа, то формула для ВБР системы имеет вид
![]() =
=![]() (
(![]() )
)
Если имеется п элементов в резерве, эта формула принимает вид

Структурная схема надежности системы должна включать блоки, представляющие надежность выключателя, который часто является «слабым местом» систем с резервированием.
Следует также обратить внимание на то, что в отличие от всех примеров, рассмотренных выше, ВБР элемента В зависит от времени, когда элементе откажет. Другими словами, отказы элементов А и В не могут оцениваться как независимые. Таким образом, для анализа резервированной системы должны использоваться другие процедуры, такие как Марковский анализ.
8 Более сложные модели
8.1 Общие процедуры
Формулы для определения ВБР систем, структурная схема надежности которых представляет собой комбинацию структурных схем надежности систем, рассмотренных в разделе 7, определяются на основе формул (1) - (7). Однако для некоторых систем ВБР не могут быть определены по вышеупомянутым формулам. Такие системы являются более сложными и для них должны использоваться более сложные методы анализа надежности. Следует заметить, что для оценки ВБР может использоваться метод Монте-Карло, но такие методы не рассматриваются в настоящем стандарте.
Стандарт распространяется на процедуры, которые используют предположение о независимости в соответствии с 7.1.
8.1.1 Использование правила условной вероятности
При работе со структурной схемой, изображенной на рисунке 8, используют другие методы. Один из таких методов состоит в том, чтобы повторно использовать следующее соотношение:
RS = Pr(SS½X работоспособный)Рr(X работоспособный) + Pr(SS½X отказавший) ´ Pr (SS½X отказавший),
где RS - ВБР системы; Pr(SS½X работоспособный) - ВБР системы, при условии, что блок Х работоспособен; Pr(SS½X отказавший) - ВБР системы, при условии, что элемент Х отказал.
Например, если на рисунке 8 элемент А отказал, структурная схема системы преобразуется в структурную схему, изображенную на рисунке 11.
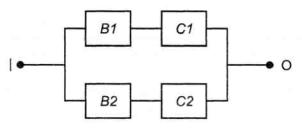
Рисунок 11
Поэтому Pr(SS½отказавший) = RB1RC1 + RB2RC2 - RB1RC1RB2RC2
Если элемент А работоспособен, структурная схема системы преобразуется в структурную схему, изображенную на рисунке 12.
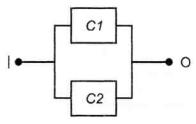
Рисунок 12
Поэтому Pr (SS½А работоспособный) = RC1 + RC2 - RC1RC2
Следовательно:
RS = (RC1 + RC2 - RC1RC2) RA + (RB1RC1 + RB2RC2 - RB1RC1RB2RC2) ´ (1 - RA)
Если RC1 = RC2 = RC и RB1 = RB2 = RB, то вышеупомянутая формула упрощается до вида
![]() , (8)
, (8)
Вышеупомянутый метод допускается применять для проверки формул (5)-(7).
8.1.2 Использование Булевых таблиц
8.1.2.1 Общие положения
Пути работоспособности, изображенные с помощью структурной схемы надежности, могут быть описаны Булевыми формулами. Например, три элемента A, В и С, соединенные параллельно (для работы системы достаточно одного работоспособного элемента), могут быть представлены структурной схемой надежности, изображенной на рисунке 13, или описаны Булевым выражением:
где SS - событие, состоящее в том, что система находится в работоспособном состоянии;
А, В и С - события, состоящие в том, что компоненты А, В и С находятся в работоспособном состоянии.
Однако Булевы события А, В и С в формуле (9) не могут быть заменены вероятностями. RA, RB, RС для получения формулы для определения ВБР системы, потому что выражение (9) является набором «пересекающихся» событий. Выражение (9) можно записать как сумму непересекающихся событий следующим образом
С позиций Булевой
алгебры выражения (9) и (10)
идентичны. Однако в выражении (10) каждая буква А, ![]() , В,
, В, ![]() , С,
, С, ![]() может быть
заменена соответствующим знаком ВБР - RA(1 - RA), RB(1 - RB), RC(1 - RC)
может быть
заменена соответствующим знаком ВБР - RA(1 - RA), RB(1 - RB), RC(1 - RC)
Для ВБР системы получаем следующую формулу
RS = RA (1 - RB)(1-RC) + (1-RA) RB (1-RC) + (1-RA)(1-RB) RC + RA (1-RB) RC + RARB (1-RC) + (1-RA) RBRC + RARBRC, (11)
Каждый более простой способ записи выражения (9) с помощью непересекающихся событий имеет вид:
![]() , (12)
, (12)
Таким образом,
RS = RA + (1 - RA)RB + (1 - RB)(1 - RA)RC, (13)
Упрощенные выражения (11) и (13) идентичны.
Процесс вывода формулы (11) может быть выполнен более подробно с применением таблицы истинности (таблица 1) для преобразования выражения (9) в выражение (10).
Таблица 1
|
Элемент |
Система |
||
|
A |
B |
C |
|
|
0 |
0 |
0 |
0 |
|
0 |
0 |
1 |
1 |
|
0 |
1 |
0 |
1 |
|
0 |
1 |
1 |
1 |
|
1 |
0 |
0 |
1 |
|
1 |
0 |
1 |
1 |
|
1 |
1 |
0 |
1 |
|
1 |
1 |
1 |
1 |
|
Примечание - 1 - работоспособный элемент, 0 - отказавший элемент. |
|||
Двигаясь по таблице сверху вниз, можно записать следующие выражения для определения работоспособных состояний системы:
![]()
Формула (10) является логическим объединением этих событий.
8.1.2.2 Применение таблицы истинности для примера структурной схемы, изображенной на рисунке 8. Перечисления всех комбинаций работоспособных и отказавших элементов системы приведены в таблице 2.
|
Элемент |
Система |
||||
|
B1 |
B2 |
C1 |
C2 |
A |
|
|
0 |
0 |
0 |
0 |
0 |
0 |
|
0 |
0 |
0 |
0 |
1 |
0 |
|
0 |
0 |
0 |
1 |
0 |
0 |
|
0 |
0 |
0 |
1 |
1 |
1 |
|
0 |
0 |
1 |
0 |
0 |
0 |
|
0 |
0 |
1 |
0 |
1 |
1 |
|
0 |
0 |
1 |
1 |
0 |
0 |
|
0 |
0 |
1 |
1 |
1 |
1 |
|
0 |
1 |
0 |
0 |
0 |
0 |
|
0 |
1 |
0 |
0 |
1 |
0 |
|
0 |
1 |
0 |
1 |
0 |
1 |
|
0 |
1 |
0 |
1 |
1 |
1 |
|
0 |
1 |
1 |
0 |
0 |
0 |
|
0 |
1 |
1 |
0 |
1 |
1 |
|
0 |
1 |
1 |
1 |
0 |
1 |
|
0 |
1 |
1 |
1 |
1 |
1 |
|
1 |
0 |
0 |
0 |
0 |
0 |
|
1 |
0 |
0 |
0 |
1 |
0 |
|
1 |
0 |
0 |
1 |
0 |
0 |
|
1 |
0 |
0 |
1 |
1 |
1 |
|
1 |
0 |
1 |
0 |
0 |
1 |
|
1 |
0 |
1 |
0 |
1 |
1 |
|
1 |
2 |
3 |
4 |
5 |
6 |
|
1 |
0 |
1 |
1 |
0 |
1 |
|
1 |
0 |
1 |
1 |
1 |
1 |
|
1 |
1 |
0 |
0 |
0 |
0 |
|
1 |
1 |
0 |
0 |
1 |
0 |
|
1 |
1 |
0 |
1 |
0 |
1 |
|
1 |
1 |
0 |
1 |
1 |
1 |
|
1 |
1 |
1 |
0 |
0 |
1 |
|
1 |
1 |
1 |
0 |
1 |
1 |
|
1 |
1 |
1 |
1 |
0 |
1 |
|
1 |
1 |
1 |
1 |
1 |
1 |
|
Примечание – 1 - работоспособный элемент, 0 - отказавший элемент. |
|||||
По таблице 2 можно выбрать комбинации работоспособных элементов и записать выражение для ВБР системы с помощью противоположных событий
![]() , (14)
, (14)
Из выражения (14) следует, что
RS = (1 - RB1)(1 - RB2)(1 - RC1) RC2RA + (1 - RB1)(1 - RB2) RC1(1 - RC2)RA +,…,+ RB1RB2RC1RC2RA
Выражение (14) содержит 19 событий, соответствующих комбинациям работоспособности системы, которые необходимо суммировать, чтобы получить искомый результат. Из приведенного примера легко заметить, что выражение для ВБР, полученное на основе Булева подхода, очень скоро может стать необозримым.
8.2 Модели с общими блоками
В структурной схеме надежности систем, рассмотренных в разделе 7, ни один из блоков не используется более одного раза. Это может быть удобно при построении структурной схемы надежности системы, изображенной на рисунке 14. Например, элементы С и D могли бы быть функционально подобными элементами, действующими по отношению друг к другу как дублирующие элементы, но элемент D может быть подключен только элементом В. учитывая, что элемент В подает питание к С и D. На рисунке 14 изображено не только физическое расположение элементов, но и структурная схема надежности. В такой структурной схеме важно направление стрелок.
Работоспособность системы в вышеуказанном случае может быть представлена в соответствии со структурной схемой надежности, в которой некоторые блоки входят более одного раза, как изображено на рисунке 15. Эта структурная схема была получена на основе структурной схемы надежности системы, приведенной на рисунке 14, на основе его анализа и выделения пар элементов, одновременный отказ которых приводит к отказу системы. Таким образом, рисунок 15 представляет собой последовательную комбинацию таких пар элементов.
При работе со структурной схемой подобного типа неправильно обрабатывать блоки как независимые пары и затем перемножать ВБР пар. Вместо этого необходимо использовать любой из методов, приведенных в 8.1.1 и 8.1.2.
Например, используя метод, описанный в 8.1.1, получаем:
RS = Pr (SS½B работоспособный) Рr (В работоспособный) + Pr (SS½B отказавший) Pr (В отказавший),
где Pr (SS½В работоспособный) задается в соответствии со структурной схемой надежности, включающей параллельные блоки С и D поскольку
Pr (SS½B отказавший) = Pr (SS½B отказавший½С работоспособный) ´ Рr (С работоспособный) + Pr (SS½B отказавший½С отказавший) Рr (С отказавший) = RARC + 0
Следовательно, RS = (RD + RC - RDRC) RB + RARC (1 - RB) = RARC + RBRC + RBRD - RARBRC - RDRBRC.
На рисунках 14 и 15 представлены различные способы моделирования одного и того же определения отказа. А именно, отказ системы происходит тогда, когда отказали блоки A и B или B и C, или C и D. Другими словами, Булевы выражения для описания работоспособности системы SS или отказа системы C будут одними и теми же для обоих рисунков 14 и 15:
![]()
![]()
Применяя метод, приведенный в 8.1.2, получаем данные, приведенные в таблице 3.
Таблица 3
|
Элемент |
Система |
|||
|
A |
B |
C |
D |
|
|
1 |
1 |
1 |
1 |
1 |
|
1 |
1 |
1 |
0 |
1 |
|
1 |
1 |
0 |
1 |
1 |
|
1 |
1 |
0 |
0 |
0 |
|
1 |
0 |
1 |
1 |
1 |
|
1 |
0 |
1 |
0 |
1 |
|
1 |
0 |
0 |
1 |
0 |
|
1 |
0 |
0 |
0 |
0 |
|
0 |
1 |
1 |
1 |
1 |
|
0 |
1 |
1 |
0 |
1 |
|
0 |
1 |
0 |
1 |
1 |
|
0 |
1 |
0 |
0 |
0 |
|
0 |
0 |
1 |
1 |
0 |
|
0 |
0 |
1 |
0 |
0 |
|
0 |
0 |
0 |
1 |
0 |
|
0 |
0 |
0 |
0 |
0 |
|
Примечание- 1 - работоспособный элемент, 0 - отказавший элемент. |
||||
При помощи таблицы 3 можно записать следующее выражение для ВБР
RS = RARBRCRD + RARBRC(1 - RD) + RARB(1 - RC)RD + RA(1 - RB)RCRD + RA(1 - RB)RC(1 - RD) + (1 - RA)RBRCRD + (1 -RA)RBRC(1 - RD) + (1 - RA)RB(1 - RC)RD
Это выражение можно упростить до вида
R'S = RARB + RBRD + RBRC - RARBRC - RDRBRC
Другой метод, использующий общие блоки, состоит в следующем: сначала игнорируют факт, что некоторые блоки появляются более одного раза, и записывают выражение для ВБР R'S
R'S = (RA + RB - RARB)(RB + RC - RBRC)(RC + RD - RCRD)
Если скобки перемножить и члены, подобные RARBRC2 и RDRB RC2, заменить на Булевы эквиваленты RARBRC и RDRBRC соответственно, тогда выражение для ВБР системы RS можно упростить до следующего
RS = RARC + RBRD + RBRC - RARBRC - RDRBRC
8.3 Модели т из п (неидентичные элементы)
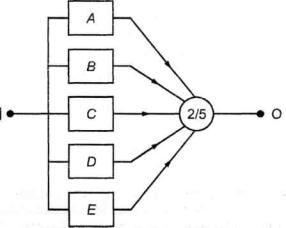
Рисунок 16
Метод определения ВБР, приведенный в 7.2.3, в этом случае не применим. Как пример рассмотрим систему, представленную структурной схемой надежности, изображенной на рисунке 16.
ВБР такой системы определяют методами, приведенными в 8.1.1 или 8.1.2. Метод, приведенный в 8.1.2, требует 32 входа. При этом вероятность отказа системы FS может быть определена по следующей формуле
FS = (1 - RA)(1 - RB)(1 - RC)(1 - RD)(1 - RE) + (1 - RA) (1 - RB) (1 - RC) (1 - RD) RE + (1 - RA)(1 - RB)(1 - RC) RD(1 - RE) + (1 - RA)(1 - RB)RC(1 - RD)(1 - RE) + (1 - RA)RB(1 - RC)(1 - RD)(1 - RE) + RA(1 - RB)(1 - RC)(1 - RD)(1 - RE)
ВБР системы определяют по формуле
RS = (1 - FS).
Примечание - В настоящее время появились более эффективные методы определения ВБР для рассматриваемого случая.
8.4 Метод редукции
Иногда структурные схемы выглядят очень сложными. Но исследование позволяет сгруппировать блоки в более управляемые элементы; такие элементы должны быть статистически независимыми. Это означает, что никакие два (или более) управляемые элемента не могут содержать блок с одинаковым обозначением. Пример подобной структурной схемы изображен на рисунке 17.
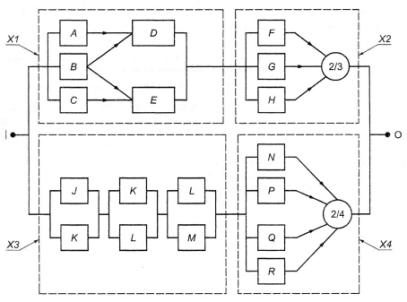
Рисунок 17
Приведенная на рисунке 17 структурная схема может быть упрощена до изображенной на рисунке 18а путем оценки надежности четырех блоков X1, Х2, Х3, Х4 в соответствии с 8.1, 7.2.3, 8.2 и 7.2.3 соответственно. Структурная схема, изображенная на рисунке 18а может быть редуцирована до структурной схемы, изображенной на рисунке 18b.
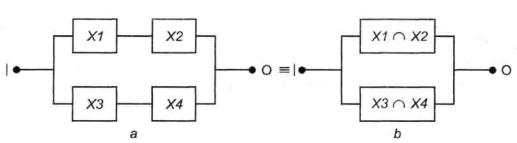
Рисунок 18
Следовательно, ВБР системы, структурная схема которой соответствует изображенной на рисунке 18b, определяют в соответствии с 7.2.2 по формуле
RS = RX1RX2 + RX3RX4 - RX1RX2RX3RX4
9 Распространение метода на вычисление коэффициента технического использования
9.1 Введение
В некоторых случаях все формулы и методы, приведенные в настоящем стандарте, допускается использовать для определения коэффициента технического использования. Для этого необходимо заменить обозначения ВБР на обозначения коэффициента технического использования.
9.2 Предположения
Метод вычисления коэффициента технического использования допускается применять в случае, если отказы и ремонт отдельных элементов независимы друг от друга. На практике это означает, что отказ любого элемента никоим образом не должен влиять на наступление отказа любого другого элемента и что должен иметься доступный бесконечный парк запасных частей и служб ремонта.
Другими словами, среднее время простоя любого элемента должно быть характеристикой только этого элемента и не должно зависеть от того, сколько других элементов отказало и нуждается в ремонте. На практике это означает, что необходимо уделять внимание схеме соединения элементов и тщательно проверять, является ли каждый элемент системы легко доступным и не влияет ли его состояние на другие элементы.
9.3 Примеры
Предположим, что мы имеем систему, для которой определение отказа может быть смоделировано в соответствии со структурной схемой, представленной на рисунке 19.
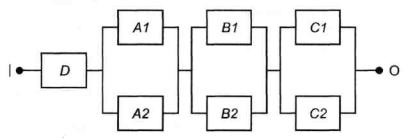
Рисунок 19
Формула для определения ВБР системы RS в соответствии с 7.2.2 имеет вид
RS = RD (RA1 + RA2 - RA1RA2)(RB1 + RB2 - RB1RB2)(RC1 + RC2 - RC1RC2)
Коэффициент технического использования элемента D обозначаем AD. Вместо А1, А2, В1, В2, С1 и С2 подставляем АА1, АA2, АВ1, АB2, АC1 и АC2 соответственно и получаем формулу для определения коэффициента технического использования системы
AS = AD (AA1 + АA2 - AA1AA2)(АB1 + АB2 - АB1АB2)(АС1 + АC2 - АC1AC2).
В качестве примера рассмотрим определение отказа системы, изображенной на рисунке 8. Соответствующая ВБР системы RS приведена в 8.1.1.
RS = (RC1 + RC2 - RC1RC2) RA + (RB1RC1 + RB2RC2 - RB1RC1RB2RC2)(1 - RA)
Следовательно, формула определения коэффициента технического использования должна быть следующей
AS = (АС1 + АC2 - АС1АC2) AA + (АB1АС1 + АB2АС2 - АB1АС1АB2АС2)(1 - AA)
Следует заметить, что если интенсивности отказов и восстановлений элементов (обозначим их lА, lB, lC, mA, mB, mC) постоянны во времени, то ВБР определяют по формулам:
![]() ,
, ![]() ,
, ![]()
а коэффициент технического использования определяют по формулам:
![]()
![]()
![]()
9.4 Заключение и общие замечания
Адаптация формул определения ВБР для вычисления коэффициента технического использования может быть очень полезной, но предположения, указанные в 9.2, должны быть тщательно проверены. Они дополняют предположения, необходимые для расчета по формулам ВБР. Предположения, необходимые для вычисления коэффициента технического использования, включают требование независимости отказов от времени и порядка появления. Когда это требование не выполняется или когда отказы и ремонты не являются независимыми, необходимо применять другие методы анализа работоспособности, например Марковский анализ.
Символы и обозначения
|
Символы и обозначения |
Смысловое значение |
|
R, R(t) |
ВБР (вероятность того, что элемент может исполнять требуемую функцию при данных условиях для данного периода времени 0, t) |
|
RA, RB |
ВБР блоков A, B |
|
RS |
ВБР системы |
|
|
Количество способов выбора г элементов из п элементов (число сочетаний из п элементов по r) |
|
Pr(SS|X отказавший) |
Условная вероятность безотказной работы системы при условии, что элемент X отказал |
|
SS |
Состояние работоспособности системы (используется в Булевых выражениях) |
|
SF |
Состояние отказа системы (используется в Булевых выражениях) |
|
A, B, C |
При использовании в Булевых выражениях эти величины, указывают, что элементы А, В, С находятся в работоспособном состоянии |
|
|
При использовании в Булевых выражениях эти величины, указывают, что элементы А, В, С находятся в состоянии отказа |
|
0,1 |
Величины, используемые в таблицах истинности для обозначения работоспособных и неработоспособных состояний и относящиеся к элементу, указанному в заголовке столбца |
|
Ç |
Булево обозначение символа И, например A Ç В (пересечение) |
|
È |
Булево обозначение символа ИЛИ, например А È В (объединение) |
|
|
Нагруженный резерв |
|
|
Ненагруженный резерв |
|
|
Используется для обозначения того, что для работоспособного состояния системы в конфигурации с активным резервированием необходимо исправное состояние т из п элементов |
|
½ |
Вход |
|
Ο |
Выход |
|
|
Такие идентификаторы необязательны, но могут быть полезны тогда, когда подключения имеют направленное значение |
|
|
Основная группировка оборудования |
Расчетные формулы
|
Основная конфигурация |
Формула определения ВБР системы |
|
|
1. Последовательное соединение
|
А. Общий случай RS = R1R2,…,Rn B, CR1 = R2,…, = Rn = R RS = Rn |
|
|
2. Параллельное соединение |
А. Общий случай Нагруженный резерв RS = 1 - (1-R1)(1-R2),…,(1-Rx) В. Нагруженный резерв R1 = R2 = ,…, = Rx = R, RS = 1 - (1 - R)x С. Ненагруженный резерв R = e-λt,
|
|
|
Нагруженный резерв
|
Ненагруженный резерв
|
|
|
3. Параллельно-последовательное соединение или система с резервированием Нагруженный резерв
|
А. Нагруженный резерв, общий случай RS = 1 - (1 - Ra1Ra2,…,Ran), (1 - Rb1Rb2,…,Rbn),…,(1 - Rx1Rx2,…,Rxn) В. Нагруженный резерв Ra1 = Ra2 =,…, = Ra, Rb1 = Rb2 =,…, = Rb, Rx1 = Rx2 =,…, = Rx,
С. Нагруженный резерв Rai = Rbi =,…, = Rxi = R Для i от 1 до n RS = 1 - (1 - Rn)x D. Ненагруженный резерв RS = e-lt
|
|
|
Ненагруженный резерв
|
||
|
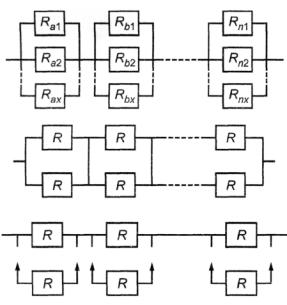
4. Последовательно-параллельное соединение резервированных элементов Нагруженный резерв
|
А. Нагруженный резерв, общий случай RS = (1 - (1 - Ra1)(1 - Ra2) ,…, (1 - Rax) ´ (1 - (1- Rb1)(1 - Rb2),…,(1 - Rbx) ´ ,…,(1 - (1 - Rn1)(1 -Rn2),…,(1-Rnx) В. Нагруженный резерв Ra1 = Ra2 =,…, = Ra, Rb1 = Rb2 =,…, = Rb, Rn1 = Rn2 =,…, = Rn, RS = (1 - (1 - Ra)x)(1 - (1- Rb)x),…,(1 - (1 - Rn)x) С. Нагруженный резерв Rai = Rbi = ,…,= Rni= R Для i от 1 до x RS = (1 - (1-Rx)n)n Предположим, что х = 2 и R = e-lt , тогда RS = (2e-lt - e-2lt)n D. Ненагруженный резерв R = e-lt
|
|
|
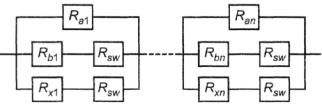
5. Резервированные элементы с подключением
|
А. Нагруженный резерв Rai = Rbi = ,…,= Rxi= R (исключая RSW) RS=(1-(1-R)(1-RRSW)x-1)n В. Нагруженный резерв, х = 2 и Rai = Rbi = ,…,= Rxi= R = e-lt (исключая RSW),
|
|
|
Примечания 1. ВБР резервированного элемента с переключением (конфигурация 5А) будет превосходить ВБР резервированной системы (3С) до тех пор, пока ВБР устройства переключения превышает значение RS для резервированной системы, разделенное на R переключаемого элемента:
где RS соответствует системе 3С в таблице. 2. В случае, когда интенсивность отказов λ постоянна, допускается заменять R(t) на e-lt. |
||

Ключевые слова: риск, надежность, вероятность безотказной работы, система, элемент, отказ, коэффициент технического использования