МЕЖГОСУДАРСТВЕННЫЙ СОВЕТ ПО СТАНДАРТИЗАЦИИ, МЕТРОЛОГИИ И
СЕРТИФИКАЦИИ
(МГС)
INTERSTATE COUNCIL FOR STANDARDIZATION,
METROLOGY AND CERTIFICATION
(ISC)
|
МЕЖГОСУДАРСТВЕННЫЙ |
ГОСТ |
Вибрация
ИЗМЕРЕНИЯ ВИБРОАКУСТИЧЕСКИХ ПЕРЕДАТОЧНЫХ ХАРАКТЕРИСТИК
УПРУГИХ ЭЛЕМЕНТОВ КОНСТРУКЦИЙ В ЛАБОРАТОРНЫХ УСЛОВИЯХ
Часть 3
Косвенный
метод определения динамической
жесткости упругих опор для поступательной вибрации
ISO 10846-3:2002
Acoustics and vibration - Laboratory measurement of vibro-acoustic
transfer properties of resilient elements -
Part3:
Indirect method for determination of the dynamic stiffness of resilient
supports for
translatory motion
(MOD)
|
|
Москва Стандартинформ 2009 |
Предисловие
Цели, основные принципы и основной порядок проведения работ по межгосударственной стандартизации установлены ГОСТ 1.0-92 «Межгосударственная система стандартизации. Основные положения» и ГОСТ 1.2-97 «Межгосударственная система стандартизации. Стандарты межгосударственные, правила, рекомендации по межгосударственной стандартизации. Порядок разработки, принятия, обновления и отмены»
Сведения о стандарте
1 ПОДГОТОВЛЕН Автономной некоммерческой организацией «Научно-исследовательский центр контроля и диагностики технических систем» (АНО «НИЦ КД») на основе собственного аутентичного перевода стандарта, указанного в пункте 4
2 ВНЕСЕН Федеральным агентством по техническому регулированию и метрологии Российской Федерации
3 ПРИНЯТ Евразийским советом по стандартизации, метрологии и сертификации (протокол № 33-2008 от 6 июня 2008 г.)
За принятие проголосовали:
|
Краткое наименование страны по MK (ИСО 3166) 004-97 |
Код страны по МК (ИСО 3166) 004-97 |
Сокращенное наименование национального органа по стандартизации |
|
Беларусь |
BY |
Госстандарт Республики Беларусь |
|
Казахстан |
KZ |
Госстандарт Республики Казахстан |
|
Кыргызстан |
KG |
Кыргызстандарт |
|
Молдова |
MD |
Молдова-Стандарт |
|
Российская Федерация |
RU |
Федеральное агентство по техническому регулированию и метрологии |
|
Таджикистан |
TJ |
Таджикстандарт |
|
Узбекистан |
UZ |
Узстандарт |
|
Украина |
UA |
Госпотребстандарт Украины |
4 Настоящий стандарт является модифицированным по отношению к международному стандарту ИСО 10846-3:2002 «Акустика и вибрация. Измерения виброакустических передаточных характеристик упругих элементов конструкций в лабораторных условиях. Часть 3. Косвенный метод определения динамической жесткости упругих опор для поступательной вибрации» (ISO 10846-3:2002 «Acoustics and vibration - Laboratory measurement of vibro-acoustic transfer properties of resilient elements - Part 3: Indirect method for determination of the dynamic stiffness of resilient supports for translatory motion») путем изменения содержания положений, объяснение которого приведено во введении к настоящему стандарту, и изменения его структуры. Содержание измененных положений приведено в приложении С. Измененные фразы, слова показатели и их значения выделены в тексте курсивом.
Сравнение структуры настоящего стандарта со структурой указанного международного стандарта приведено в дополнительном приложении D.
Международный стандарт разработан ИСО/ТК 43 «Акустика» и ИСО/ТК 108 «Вибрация и удар».
Перевод с английского языка (en).
Степень соответствия - (MOD)
5 Приказом Федерального агентства по техническому регулированию и метрологии от 11 декабря 2008 г. № 387-ст межгосударственный стандарт ГОСТ 31368.3-2008 (ИСО 10846-3:2002) введен в действие в качестве национального стандарта Российской Федерации с 1 октября 2009 г.
6 ВВЕДЕН ВПЕРВЫЕ
Информация о введении в действие (прекращении действия) настоящего стандарта публикуется в указателе «Национальные стандарты».
Информация об изменениях к настоящему стандарту публикуется в указателе «Национальные стандарты», а текст этих изменений - в информационных указателях «Национальные стандарты». В случае пересмотра или отмены настоящего стандарта соответствующая информация будет опубликована в информационном указателе «Национальные стандарты»
Содержание
Введение
Виброизоляторы различных конструкций применяют для снижения уровня передаваемой вибрации. Примерами могут служить подвески автомобильных двигателей, упругие опоры зданий, устройства крепления и упругие муфты в соединениях валов машин, виброизоляторы, устанавливаемые в предметах бытовой техники.
Настоящий стандарт устанавливает косвенный метод измерений переходной динамической жесткости линейных упругих опор. Настоящий стандарт распространяется также на опоры с нелинейной зависимостью прогиба от постоянной нагрузки при выполнении условия линейности отклика в отношении переменных (вибрационных) нагрузок при заданном статическом смещении.
Настоящий стандарт входит в комплекс стандартов на методы лабораторных измерений виброакустических свойств упругих элементов конструкций, который включает в себя стандарты на общие принципы измерений, прямой и косвенный методы измерений, а также на метод измерений входной динамической характеристики. Общее руководство по выбору соответствующего стандарта приведено в ГОСТ ИСО 10846-1.
Условия испытаний по данному стандарту предусматривают применение, где это необходимо, статического нагружения опор.
Косвенный метод измерений используют для изоляторов, предназначенных для снижения передаваемой вибрации в звуковом диапазоне частот (преимущественно свыше 20 Гц). Этот метод не позволяет провести точные измерения характеристик виброизолятора, работающего в условиях низкочастотной вибрации или повторяющихся ударов.
По сравнению с примененным международным стандартом ИСО 10846-3:2002 в текст настоящего стандарта внесены следующие изменения, выделенные курсивом:
- в разделе 2 международные стандарты заменены аналогичными межгосударственными, дополнительно включен ГОСТ ИСО 10846-1, на который в тексте стандарта имеются ссылки;
- пункт 5.2.1 дополнен примечанием о возможности применения иных конструктивных решений при проектировании испытательных установок, аналогичным примечанию к пункту 5.1.1;
- пункт 5.2.5 дополнен примечанием о предпочтительности использования симметричных испытательных установок с двумя номинально идентичными испытуемыми виброизоляторами;
- исключено приложение А, устанавливающее руководство по измерению переходной динамической жесткости для вибрации, включающей угловые колебания, как недостаточно апробированное; соответственно изменена нумерация следующих приложений;
- в приложении А настоящего стандарта ссылки на структурный элемент, рисунок и формулу исключенного приложения А международного стандарта заменены соответствующим текстом, рисунком и формулой;
- исключен структурный элемент «Библиография».
ГОСТ 31368.3-2008
(ИСО 10846-3:2002)
МЕЖГОСУДАРСТВЕННЫЙ СТАНДАРТ
|
Вибрация ИЗМЕРЕНИЯ
ВИБРОАКУСТИЧЕСКИХ ПЕРЕДАТОЧНЫХ ХАРАКТЕРИСТИК Часть 3 Косвенный метод определения динамической жесткости упругих опор для поступательной вибрации Vibration. Laboratory measurement of vibro-acoustic
transfer properties of |
Дата введения - 2009-10-01
1 Область применения
Настоящий стандарт устанавливает метод определения переходной (передаточной) динамической жесткости для поступательного движения упругих опор (виброизоляторов) под заданной статической нагрузкой. Данный метод, называемый косвенным методом измерений, основан на определении передаточной функции виброизолятора по ускорению (скорости, перемещению) в лабораторных условиях. Метод применим к упругим элементам с параллельными фланцевыми поверхностями (рисунок 1).
Примечание 1 - Упругие опоры (виброизоляторы), на которые распространяется настоящий стандарт, предназначены для ослабления вибрации в диапазоне звуковых частот (от 20 Гц до 20 кГц), передаваемой от источника на конструкцию, в результате чего конструкция может излучать звук в воздушную, водную или другую среду.
Примечание 2 - Применимость метода измерений к упругим опорам как очень маленьких, так и очень больших размеров может быть ограничена размерами испытательной установки.
Примечание 3 - Метод применим также для испытаний распределенных опор в форме пластин или плит. Возможность использования данного метода для измерения характеристик конкретной опоры сложной формы определяет пользователь стандарта.
Настоящий стандарт распространяется на вибрацию в направлениях, перпендикулярном (нормальная составляющая) и параллельном (поперечная составляющая) к фланцевой поверхности опоры.
Установленный в настоящем стандарте метод применим в диапазоне частот от f2 до f3. Значения f2 и f3 зависят от особенностей испытательного стенда и конкретного испытуемого объекта. Обычно значение f2 находится в диапазоне от 20 до 50 Гц, а значение f3 - в диапазоне от 2 до 5 кГц.
Результаты, полученные с помощью данного метода, могут быть использованы:
- изготовителями (поставщиками) упругих опор для указания их динамических характеристик в сопроводительной документации;
- в процессе разработки продукции;
- в системах управления качеством продукции;
- для вибрационных расчетов конструкций.
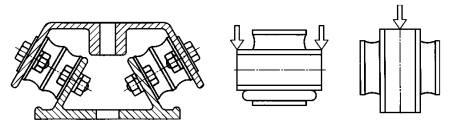
Примечание 1 - Если упругие опоры не имеют параллельных фланцевых поверхностей, следует использовать дополнительные прокладки, которые будут рассматриваться как часть испытуемого объекта.
Примечание 2 - Стрелками показано направление приложения нагрузки.
Рисунок 1 - Примеры упругих опор с параллельными фланцевыми поверхностями
2 Нормативные ссылки
В настоящем стандарте использованы нормативные ссылки на следующие стандарты:
ГОСТ ИСО 5348-2002 Вибрация и удар. Механическое крепление акселерометров
ГОСТ ИСО 7626-1-94 Вибрация и удар. Экспериментальное определение механической подвижности. Основные положения
ГОСТ ИСО 7626-2-94 Вибрация и удар. Экспериментальное определение механической подвижности. Измерения, использующие одноточечное поступательное возбуждение присоединенным вибровозбудителем
ГОСТ ИСО 10846-1-2002 Вибрация. Измерения виброакустических передаточных характеристик упругих элементов конструкций в лабораторных условиях. Часть 1. Общие принципы измерений и руководство по их проведению
ГОСТ 12090-80 Частоты для акустических измерений. Предпочтительные ряды
ГОСТ 24346-80 Вибрация. Термины и определения
ГОСТ 30652-99 Вибрация. Калибровка датчиков вибрации и удара. Часть 3. Вторичная вибрационная калибровка методом сличения
Примечание - При пользовании настоящим стандартом целесообразно проверить действие ссылочных стандартов на территории государства по соответствующему указателю стандартов, составленному по состоянию на 1 января текущего года, и по соответствующим информационным указателям, опубликованным в текущем году. Если ссылочный стандарт заменен (изменен), то при пользовании настоящим стандартом следует руководствоваться заменяющим (измененным) стандартом. Если ссылочный стандарт отменен без замены, то положение, в котором дана ссылка на него, применяется в части, не затрагивающей эту ссылку.
3 Термины и определения
В настоящем стандарте применены термины по ГОСТ 24346, а также следующие термины с соответствующими определениями.
3.1 виброизолятор; упругий элемент (vibration isolator; resilient element): Устройство, предназначенное для ослабления передаваемой вибрации в некотором диапазоне частот.
3.2 упругая опора (resilient support): Упругий элемент, назначение которого - поддерживать часть машины, здания или конструкции другого типа.
3.3 испытуемый объект (test element): Упругая опора, подвергающаяся испытаниям, вместе с фланцами и, при необходимости, вспомогательными приспособлениями.
3.4 затормаживающая сила (blocking force) Fb: Сила, приложенная к изолятору в точке его соединения с изолируемой конструкцией и обеспечивающая неподвижность этой точки.
3.5 переходная (передаточная) динамическая жесткость (dynamic transfer stiffness) k2,1: Величина, представляющая собой частотно-зависимое отношение комплексной силы в заторможенной точке соединения упругого элемента с изолируемой конструкцией (выходная сторона виброизолятора) к комплексному перемещению в точке соединения упругого элемента с источником вибрации (входная сторона виброизолятора) при гармонических колебаниях.
Примечание 1 - Индексы 1 и 2 обозначают входную и выходную стороны виброизолятора, соответственно.
Примечание 2 - Значение k2,1 может зависеть от предварительного статического нагружения виброизолятора, его температуры и других условий. На низких частотах эта величина зависит только от упругих и диссипативных сил и равна k1,1, где k1,1 - отношение силы к перемещению на входной стороне виброизолятора.
Примечание 3 - В области более высоких частот существенную роль играют также силы инерции, что приводит к тому, что k2,1 ≠ k1,1
3.6 коэффициент потерь упругого элемента (loss factor of resilient element) η: Величина, представляющая собой отношение мнимой и действительной частей k2,1 (т.е. тангенс фазового угла k2,1) в диапазоне низких частот, где влияние инерционных сил в упругом элементе незначительно.
3.7 переходная (передаточная) динамическая жесткость, усредненная по частоте (frequency-averaged dynamic transfer stiffness) kav: Величина, выражаемая частотно-зависимым средним значением переходной динамической жесткости в полосе частот Δf (см. 8.2).
3.8 точечное соединение: Область контакта, которая совершает колебания как поверхность абсолютно жесткого тела.
3.9 нормальная составляющая поступательного движения (normal translation): Поступательная вибрация, действующая перпендикулярно к фланцевой поверхности упругого элемента.
3.10 поперечная составляющая поступательного движения (transverse translation): Поступательная вибрация, действующая перпендикулярно к нормальной составляющей поступательного движения.
3.11 линейность (linearity): Свойство поведения виброизолятора в динамическом режиме, при котором выполняется принцип суперпозиции.
Примечание 1 - Принцип суперпозиции может быть сформулирован следующим образом: если входному воздействию x1(t) соответствует отклик на выходе y1(t), а входному воздействию x2(t) - отклик y2(t), то считают, что принцип суперпозиции выполнен, если входному воздействию αx1(t) + βх2(t) будет соответствовать отклик αy1(t) + βy2(t). Данное условие должно выполняться для любых α, β, x1(t) и x2(t), где α и β - произвольные константы.
Примечание 2 - Прямая проверка выполнения принципа суперпозиции малопригодна с практической точки зрения, поэтому контроль линейности обычно осуществляют, проводя измерения переходной жесткости в некотором диапазоне входных воздействий. Если при заданном предварительном статическом нагружении виброизолятора измеренное значение динамической жесткости не зависит от амплитуды входного возбуждения, систему можно рассматривать как линейную. По сути, эта процедура является контролем пропорциональности между возбуждением и откликом.
3.12 прямой метод (direct method): Метод, в соответствии с которым измерению подлежат перемещение, скорость или ускорение на входной поверхности виброизолятора и затормаживающей силы на выходной поверхности виброизолятора.
3.13 косвенный метод (indirect method): Метод, в соответствии с которым измерению подлежит передаточная функция по перемещению, скорости или ускорению при нагружении виброизолятора известной массой.
Примечание - В общем случае косвенный метод допускает нагружение не только массой, но и любым другим известным импедансом. Однако в настоящем стандарте такие способы нагружения не рассматриваются.
3.14 передаточная функция (transmissibility) Т: Величина, представляющая собой отношение u2/u1 комплексных перемещений на выходной (u2) и входной (u1) поверхностях испытуемого объекта при гармонических колебаниях.
Примечание - Передаточная функция может быть аналогичным образом определена (и иметь то же значение) через скорость v или ускорение а.
3.15 уровень силы (force level) LF: Величина, выражаемая в децибелах (дБ) и определяемая по формуле
![]()
где F2 - средний квадрат силы в заданной полосе частот;
F0 - опорное значение силы, равное 1 мкН 1).
_____________
1) В отечественной практике часто применяют другие опорные значения силы и жесткости: 20 мкН и 8 кН·м-1 соответственно, поэтому при рассмотрении данных о динамической жесткости, представленных в виде относительных, а не абсолютных величин, всегда необходимо учитывать, какие опорные значения были использованы.
3.16 уровень ускорения (acceleration level) La: Величина, выражаемая в децибелах (дБ) и определяемая по формуле
![]()
где а2 - средний квадрат ускорения в заданной полосе частот;
а0 - опорное значение ускорения, равное 10-6 м/с2.
3.17 уровень переходной (передаточной) динамической
жесткости (level of dynamic transfer stiffness) ![]() : Величина, выражаемая в децибелах (дБ) и определяемая по
формуле
: Величина, выражаемая в децибелах (дБ) и определяемая по
формуле
где ![]() - средний квадрат
переходной динамической жесткости (см. 3.5)
в заданной полосе частот;
- средний квадрат
переходной динамической жесткости (см. 3.5)
в заданной полосе частот;
k0 - опорное значение жесткости, равное 1 Н·м-1.
3.18 уровень переходной (передаточной)
динамической жесткости, усредненной по частоте (level of frequency band
averaged dynamic transfer stiffness) ![]() : Величина, выражаемая в децибелах (дБ) и определяемая по
формуле
: Величина, выражаемая в децибелах (дБ) и определяемая по
формуле
![]()
где kav - величина, определенная в 3.7;
k0 - опорное значение жесткости, равное 1 Н·м-1.
3.19 вибрация, передаваемая побочным путем (flanking transmission): Силы и ускорения на выходной поверхности, вызванные вибрационным возбуждением входной поверхности виброизолятора, но переданные не через испытуемый объект, а побочным путем.
4 Теоретические основы метода
Принципы косвенного метода измерений описаны в ГОСТ ИСО 10846-1.
Основное отличие данного метода от прямого метода измерений заключается в том, что затормаживающую выходную силу определяют по измерениям ускорения нагружающей массы т2, которая препятствует колебаниям выходной поверхности испытуемого объекта. Эта масса должна быть динамически развязана с другими узлами испытательной установки, чтобы исключить передачу вибрации побочными путями.
При гармонических колебаниях связь переходной динамической жесткости (см. 3.5) с передаточной функцией (см. 3.14) определяется формулой
где индексы 1 и 2 обозначают входную и выходную поверхности виброизолятора, соответственно.
Получение затормаживающей силы в соответствии с правой частью формулы (1) требует, чтобы эта сила определялась только соответствующей вибрацией нагружающей массы. Поэтому измерению подлежит вибрация центра тяжести нагружающей массы в направлении действия затормаживающей силы.
5 Требования к измерительному и испытательному оборудованию
5.1 Нормальная составляющая поступательного движения
На рисунках 2 - 4 приведены схемы возможных конструктивных решений установок для испытаний упругих опор при поступательных колебаниях в направлении, соответствующем обычному приложению нагрузки. Испытуемые объекты закрепляют на установке способом, соответствующим условию их эксплуатации.
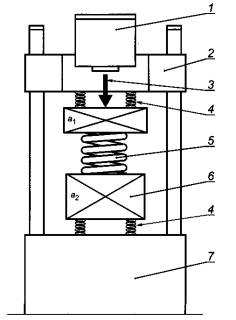
1 - вибровозбудитель; 2 - поперечина; 3 - толкатель; 4 - вспомогательные виброизоляторы; 5 - испытуемый объект; 6 - нагружающая масса; 7 - жесткое основание
а) Общий вид
1 - статическая нагрузка; 2 - поперечина; 3 - динамическое возбуждение; 4 - акселерометр (измерение а1); 5 - масса распределения возбуждения; 6 - испытуемый объект
b) Входная поверхность (фрагмент)
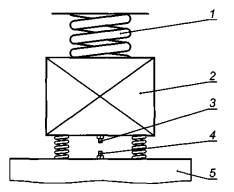
1 - испытуемый объект; 2 - нагружающая масса т1; 3 - акселерометр (измерение а2); 4 - акселерометр (измерение а3); 5 - жесткое основание
с) Выходная поверхность (фрагмент)
Рисунок 2 - Лабораторная испытательная установка для измерений переходной динамической жесткости для нормальной составляющей поступательного движения (пример 1)
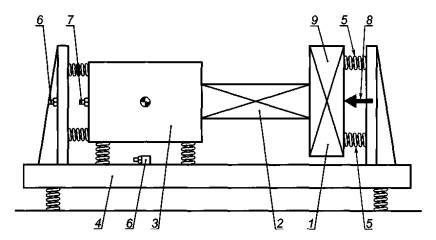
1 - масса распределения возбуждения; 2 - испытуемый объект; 3 - нагружающая масса; 4 - жесткое основание; 5 - вспомогательные виброизоляторы; 6 - акселерометр (измерение а3); 7 - акселерометр (измерение а2); 8 - динамическое возбуждение; 9 - акселерометр (измерение а1)
Рисунок 3 - Лабораторная испытательная установка для измерений переходной динамической жесткости для нормальной составляющей поступательного движения (пример 2)
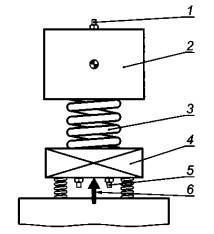
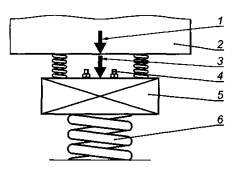
1 - акселерометр (измерение а2); 2 - нагружающая масса; 3 - испытуемый объект; 4 - масса распределения возбуждения; 5 - акселерометр (измерение а1); 6 - динамическое возбуждение
Примечание - Сила тяжести, создаваемая нагружающей массой, используется как статическая нагрузка для испытуемого объекта.
Рисунок 4 - Лабораторная испытательная установка для измерений переходной динамической жесткости для нормальной составляющей поступательного движения (пример 3)
Примечание - Схемы, приведенные на рисунках 2 - 4, не охватывают всех возможных конструктивных исполнений испытательных установок, поэтому они не должны использоваться как основание для ограничений на иные конструктивные решения.
Для реализации метода, установленного в настоящем стандарте, испытательная установка должна включать в себя блоки, описанные в 5.1.2 - 5.1.6.
Нагружающую массу присоединяют к выходной поверхности испытуемого объекта. Одно из ее назначений заключается в том, чтобы гасить колебания выходной поверхности. Затормаживающую силу определяют по результатам измерений ускорения этой массы. Другое назначение нагружающей массы - обеспечить идентичность колебаний разных точек выходной фланцевой поверхности испытуемого объекта.
5.1.3 Устройство предварительного статического нагружения
После установки испытуемый объект должен испытывать воздействие представительной и заданной статических нагрузок, которые можно создать, например, одним из следующих способов:
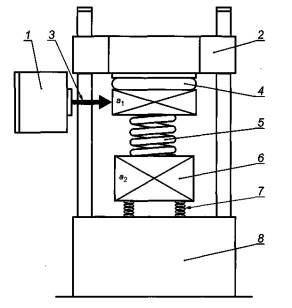
a) использованием в качестве вибровозбудителя гидравлического вибростенда, который способен самостоятельно создавать статическую нагрузку. Испытуемый объект устанавливают внутри рамы вибростенда. Выходную поверхность испытуемого объекта соединяют с нагружающей массой, которая поддерживается вспомогательными виброизоляторами для развязки с рамной конструкцией вибростенда. Суммарная динамическая жесткость вспомогательных виброизоляторов в области низких частот должна быть примерно равна динамической жесткости испытуемого объекта;
b) использованием рамной конструкции только для создания статической нагрузки (см. рисунки 2 и 3). В этом случае необходимо установить дополнительные виброизоляторы со стороны входной поверхности испытуемого объекта для его развязки с рамной конструкцией;
c) использованием для создания статической нагрузки силы тяжести нагружающей массы, которую помещают на верхнем фланце испытуемого объекта [опорную раму в этом случае не используют (см. рисунок 4)].
5.1.4 Устройства измерения ускорения
Акселерометры устанавливают на входной стороне испытуемого объекта, на нагружающей массе, а также на основании, поддерживающем нагружающую массу. Если невозможно установить акселерометры в центре поверхностей, а также для повышения точности измерений рекомендуется устанавливать по два или (предпочтительно) четыре акселерометра, сигналы с которых усредняют, симметрично центрам этих поверхностей.
Вместо акселерометров допускается использовать датчики перемещения или скорости при условии выполнения требований к диапазону частот измерений [см. рисунки 2b) и 4].
5.1.5 Система возбуждения вибрации
Система возбуждения вибрации должна обеспечивать динамическое воздействие на испытуемый объект в заданном диапазоне частот. Это может быть достигнуто с помощью вибровозбудителей разных типов, например:
a) гидравлического вибростенда, способного, кроме этого, создавать постоянную статическую нагрузку;
b) одного или нескольких вибровозбудителей электродинамического типа с толкателями;
c) одного или нескольких вибровозбудителей пьезоэлектрического типа.
Для динамической развязки вибровозбудителей и предотвращения передачи вибрации побочными путями через раму испытательной установки, создающей постоянную статическую нагрузку, может потребоваться применение вспомогательных виброизоляторов. Однако для установок на основе гидравлического вибростенда, способного создавать одновременно как статическую, так и динамическую нагрузки, такие развязки обычно нежелательны, поскольку они вносят искажения в результаты измерений на низких частотах.
5.1.6 Масса распределения возбуждения на входной поверхности
Масса распределения возбуждения, устанавливаемая на входной поверхности испытуемого объекта, предназначена для:
a) обеспечения равномерного распределения вибрационного возбуждения по поверхности фланца;
b) облегчения создания однонаправленного возбуждения.
Массу распределения возбуждения не применяют, если испытуемый объект включает в себя жесткий входной фланец, обеспечивающий выполнение вышеуказанных функций.
Примечание - Теоретически для измерений переходной динамической жесткости для нормальной составляющей поступательного движения, проводимых в соответствии с настоящим стандартом, необходимо создание однонаправленного возбуждения входной поверхности. Однако на практике для большинства упругих опор это требование не является обязательным. В ГОСТ ИСО 10846-1 (приложение А) показано, что большинство упругих опор обладают симметрией, при которой затормаживающие силы в направлении нормальной составляющей, вызванные возбуждением вибрации в других направлениях, являются незначительными. Для этого испытуемый объект должен иметь две ортогональные плоскости симметрии, линия пересечения которых совпадает с нормальной составляющей к входной поверхности опоры [см. приложение А настоящего стандарта]. Для опор более сложной формы, где данное условие симметрии не выполняется, измерения, проводимые в соответствии с настоящим стандартом, требуют преимущественно однонаправленного возбуждения (см. 5.3 и 6.4). Создание такого возбуждения существенно облегчается при использовании плоской плиты достаточно большой массы, предназначенной для распределения вынуждающей силы по поверхности.
5.2 Поперечная составляющая поступательного движения
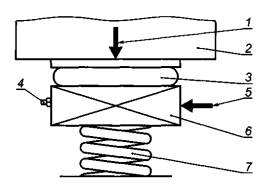
На рисунках 5 - 7 приведены схемы возможных конструктивных решений установок для испытаний упругих опор, подвергаемых воздействию поступательной вибрации в направлении, поперечном нормальной составляющей динамической нагрузки (см. примечание к 5.1.1). Испытуемые объекты закрепляют на установке способом, соответствующим условиям их эксплуатации.
Примечание - Схемы, приведенные на рисунках 5 - 7, не охватывают всех возможных конструктивных исполнений испытательных установок, поэтому они не должны использоваться как основание для ограничений на иные конструктивные решения.
1 - вибровозбудитель; 2 - поперечина; 3 - толкатель; 4 - направляющая система; 5 - испытуемый объект; 6 - нагружающая масса; 7 - вспомогательный виброизолятор; 8 - жесткое основание
а) Общий вид
1 - статическая нагрузка; 2 - поперечина; 3 - направляющая система; 4 - акселерометр (измерение а1; 5 - динамическое возбуждение; 6 - масса распределения возбуждения; 7 - испытуемый объект
b) Входная поверхность (фрагмент)
1 - испытуемый объект; 2 - нагружающая масса т2; 3 - акселерометр (измерение а3); 4 - жесткое основание; 5 - акселерометр (измерение а2)
с) Выходная поверхность (фрагмент)
Рисунок 5 - Лабораторная испытательная установка для измерений переходной динамической жесткости для поперечной составляющей поступательного движения (пример 1)
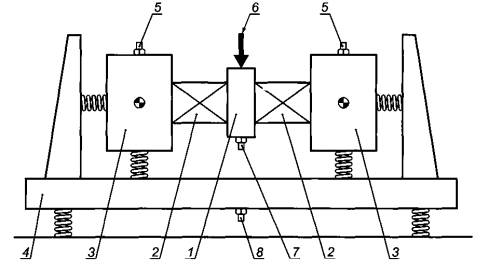
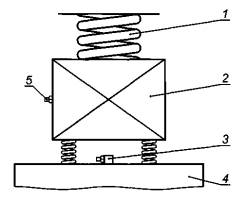
1 - масса распределения возбуждения; 2 - испытуемый объект; 3 - нагружающая масса; 4 - жесткое основание; 5 - акселерометр (измерение а2); 6 - динамическое возбуждение; 7 - акселерометр (измерение а1); 8 - акселерометр (измерение а3)
Рисунок 6 - Лабораторная испытательная установка для измерений переходной динамической жесткости для поперечной составляющей поступательного движения (пример 2)
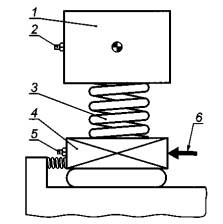
1 - нагружающая масса; 2 - акселерометр (измерение а2); 3 - испытуемый объект; 4 - масса распределения возбуждения; 5 - акселерометр (измерение а1); 6 - вибровозбудитель
Рисунок 7 - Лабораторная испытательная установка для измерений переходной динамической жесткости для поперечной составляющей поступательного движения (пример 3)
Для реализации метода, установленного в настоящем стандарте, испытательная установка должна включать в себя блоки, описанные в 5.2.2 - 5.2.6.
Если измерения проводят с использованием испытательной установки, изображенной на рисунке 7, то первая собственная частота угловых колебаний испытуемого объекта с нагружающей массой должна быть меньше нижней границы диапазона частот измерений.
5.2.2 Нагружающая масса
Требования к нагружающей массе аналогичны указанным в 5.1.2.
5.2.3 Устройство предварительного статического нагружения
После установки испытуемый объект должен испытывать воздействие представительной и заданной статических нагрузок. Способы создания таких нагрузок аналогичны описанным в 5.1.3 и изображены на рисунках 5 - 7.
5.2.4 Устройства измерения ускорения
Акселерометры устанавливают на входной стороне испытуемого объекта, на нагружающей массе, а также на основании, поддерживающем нагружающую массу.
Со стороны входной поверхности акселерометры рекомендуется устанавливать так, чтобы их ось совпадала с горизонтальной осью симметрии фланца или массы распределения возбуждения, совпадающей по направлению с воспроизводимыми поперечными колебаниями. Со стороны нагружающей массы акселерометры рекомендуется устанавливать так, чтобы их ось совпадала с горизонтальной осью, проходящей через центр масс системы, состоящей из тела, создающего нагружающую массу, и выходного фланца испытуемого объекта (см. рисунок 8). Если эти точки недоступны для установки акселерометров, а также для повышения точности измерений, на каждой из поверхностей могут быть установлены симметрично указанных точек по два или (предпочтительно) четыре акселерометра, сигналы с которых усредняют.
Вместо акселерометров допускается использовать датчики перемещения или скорости при условии выполнения требований к диапазону частот измерений.
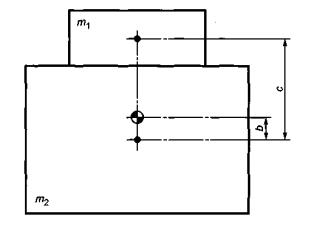
с - расстояние между центрами масс нагружающей массы и фланца; b - расстояние между центрами масс нагружающей массы и составного тела;
![]()
Рисунок 8 - Пример расположения центра масс тела, включающего в себя нагружающую массу и выходной фланец испытуемого объекта
5.2.5 Система возбуждения вибрации
Система возбуждения вибрации должна обеспечивать динамическое воздействие на испытуемый объект в заданном направлении в заданном диапазоне частот. Примеры вибровозбудителей, позволяющих реализовать данное требование, приведены в 5.1.5.
Примечание - В схемах с одним испытуемым виброизолятором (рисунки 5, 7) трудно обеспечить точное выполнение требования возбуждать колебания строго в направлении поперечной составляющей. Поэтому рекомендуется использовать схемы с двумя номинально эквивалентными испытуемыми виброизоляторами (рисунок 6) или применять несколько вибровозбудителей для подавления нежелательных составляющих вибрации.
5.2.6 Масса распределения возбуждения на входной поверхности
Масса распределения возбуждения на входной поверхности испытуемого объекта предназначена для выполнения следующих функций:
a) обеспечения равномерного распределения вибрационного возбуждения по поверхности фланца;
b) облегчения создания однонаправленного возбуждения (см. примечание).
Массу распределения возбуждения не применяют, если испытуемый объект включает в себя жесткий входной фланец, обеспечивающий выполнение вышеуказанных функций.
Примечание - Важным условием при измерении динамической жесткости в соответствии с настоящим стандартом (см. 6.4) является возбуждение преимущественно однонаправленного поступательного движения входной поверхности испытуемого объекта. При возбуждении поперечной составляющей выполнению данного условия могут способствовать:
a) симметричность направления возбуждения и граничных условий масс распределения возбуждения (см. рисунок 6);
b) инерционные свойства массы распределения возбуждения. В некоторых случаях для предотвращения движения в нежелательном направлении необходимо применять дополнительные связи (направляющие движения).
5.3 Подавление нежелательной вибрации
5.3.1 Общие положения
Метод измерения переходной динамической жесткости, установленный в настоящем стандарте, предполагает приложение однонаправленного возбуждения поочередно в направлениях нормальной и поперечной составляющих. Однако несимметричность возбуждения, граничных условий или свойств испытуемого объекта может вызвать появление нежелательных составляющих вибрации, искажающих результаты измерений на определенных частотах. Одним из способов уменьшения этого эффекта является использование испытательной установки специального типа с симметричной конфигурацией, предусматривающей установку двух идентичных объектов испытаний, имеющих одинаковую номинальную жесткость. Количественные требования к ограничению нежелательной вибрации приведены в 6.4.
5.3.2 Нормальная составляющая поступательного движения
При возбуждении вибрации в направлении нормальной составляющей контроль направления возбуждения важен только для опор сложной формы, когда имеет место взаимосвязь колебаний в разных направлениях (см. примечание к 5.1.6). В этом случае для подавления нежелательной составляющей входного возбуждения используют следующие способы:
- симметричное расположение вибровозбудителя или пар вибровозбудителей относительно испытуемого объекта;
- массу распределения возбуждения с осевой симметрией;
- массу распределения возбуждения со значительно более высокими значениями входных импедансов для поперечных и угловых колебаний в точке контакта с упругой опорой, чем соответствующие значения входных импедансов испытуемого объекта.
Еще одним способом подавления нежелательных составляющих входного возбуждения является использование симметричной испытательной установки с двумя номинально идентичными испытуемыми объектами или установки, имеющей направляющую систему со стороны массы распределения возбуждения. Такие установки аналогичны установкам для возбуждения поперечной составляющей, изображенным на рисунках 5 - 7.
5.3.3 Поперечная составляющая поступательного движения
При возбуждении вибрации в поперечном направлении неизбежно наблюдается связь этой вибрации с угловыми колебаниями входной поверхности испытуемого объекта. Существует ряд способов, позволяющих снизить вибрацию в нежелательных направлениях, примеры которых приведены на рисунках 5 - 7. На рисунке 6 изображена симметричная испытательная установка с двумя номинально идентичными испытуемыми объектами. На рисунках 5 и 7 изображены испытательные установки с направляющими движения испытуемого объекта, позволяющие уменьшить его угловые колебания. Еще один способ заключается в применении симметричной массы распределения возбуждения с передачей на него поступательного возбуждения от вибровозбудителя строго через центр тяжести. В диапазоне частот, где импедансы данного узла для поперечных и угловых колебаний существенно превышают соответствующие значения для испытуемого объекта и вспомогательных виброизоляторов для динамической развязки масс, вибрация массы распределения возбуждения будет преимущественно однонаправленной.
6 Критерии соответствия испытательной установки требованиям испытаний
Каждая испытательная установка характеризуется собственным диапазоном частот проведения испытаний. Одно из ограничений применения испытательной установки связано с номинальным диапазоном частот, на работу в котором рассчитан применяемый вибровозбудитель.
Другое ограничение связано с возможностью применения уравнения (1). Точность результатов измерений с помощью метода, установленного в настоящем стандарте, должна быть не ниже 1 дБ (т.е. в пределах 12 % расчетного значения жесткости). Это требование может быть выполнено только в определенном диапазоне частот f2 < f < f3
Одним из условий обеспечения требуемой точности результатов измерений является рассогласование импедансов испытуемого объекта и нагружающей массы в направлении действия затормаживающей силы. Результаты измерений считают достоверными только в том диапазоне частот, в котором выполняется неравенство
где а1 - ускорение на входной стороне испытуемого объекта;
а2 -ускорение нагружающей массы.
Для частот ниже некоторой частоты f2 неравенство (2) будет нарушаться вследствие резонансов системы, состоящей из испытуемого объекта, массы распределения возбуждения, нагружающей массы и пружин для динамической развязки масс. Как правило, чем больше нагружающая масса т2, тем меньше значение f2.
Примечание - Собственные частоты колебаний испытательной установки могут быть определены расчетным путем с использованием соответствующего программного обеспечения для описания колебаний системы, состоящей из нескольких жестких тел с упругими связями. Нижняя граница диапазона частот f2 должна быть примерно в три раза больше высшей частоты собственных колебаний (включая угловые колебания), которые могут повлиять на результаты измерений в заданном направлении. Но даже в этом случае неравенство (2) может не соблюдаться на отдельных частотах, превышающих f2. Помимо несовершенства испытательной установки это может быть связано с повышением на данных частотах жесткости испытуемого объекта вследствие внутренних резонансов.
Другим условием применимости уравнения (1) является выполнение предположения, что нагружающая масса колеблется как твердое тело массы т2. От размеров и формы нагружающей массы может зависеть значение верхней границы диапазона измерений f3 (см. 6.2).
6.2 Определение верхней границы диапазона частот f3
6.2.1 Эффективная масса
Ограничение диапазона измерений в области высоких частот обусловлено тем фактом, что выше некоторой частоты нагружающую массу, используемую для измерения затормаживающей силы, нельзя считать твердым телом. В области частот выше f3 вместо формулы (1) справедлива следующая
![]()
где т2,eff - эффективная масса нагружающей массы. Эффективная масса - частотно-зависимое отношение вынуждающей силы, действующей со стороны упругого элемента на нагружающую массу, к ускорению а2 нагружающей массы. Значение данной динамической характеристики упругого элемента зависит от направления и области возбуждения, а также от места установки акселерометров.
Результаты измерений, проведенных в соответствии с требованиями настоящего стандарта, должны быть представлены в диапазоне частот f ≤ f3, а верхнюю границу диапазона частот выбирают согласно 6.2.2 и 6.2.3.
6.2.2 Применение нагружающей массы с заданными свойствами
Номограммы, применяемые для определения верхней границы диапазона частот испытаний с использованием в качестве нагружающей массы стальных блоков кубической или цилиндрической формы, изображены на рисунке 9.
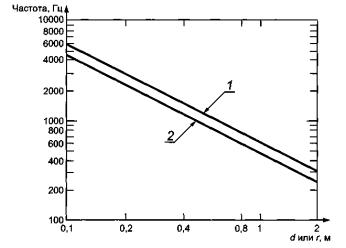
а) Зависимость частоты f3 от размеров стального блока
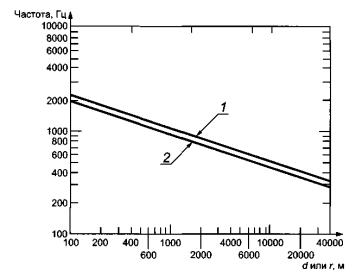
b) Зависимость частоты f3 от массы стального блока
1 - для блока в виде сплошного цилиндра; 2 - для блока в виде сплошного куба; r - длина стороны куба; d - диаметр цилиндра
Примечание - Диаметр d блока цилиндрической формы должен быть равен высоте h.
Рисунок 9 - Номограммы для стальных блоков кубической или цилиндрической формы, лист 1
Если такие блоки применяют в испытательной установке, то по формуле (1) вычисляют переходную динамическую жесткость в диапазоне частот f ≤ f3, где f3 - значение, определяемое по номограмме, изображенной на рисунке 9 а), для заданного размера стального блока.
Примечание - На рисунке 9b) показано соотношение между частотой f3 и массой т2 блока кубической (цилиндрической) формы. Масса т2 (по возможности, минимальная) может быть выбрана из соображений получения требуемого значения нижней границы диапазона частот f2. В этом случае по номограмме, изображенной на рисунке 9b), для заданного значения т2 определяют f3, а потом для полученного значения f3 по номограмме, изображенной на рисунке 9а), определяют диаметр d или размер ребра r стального блока.
6.2.3 Определение эффективной массы экспериментальным путем
Если по какой-либо причине невозможно использовать в качестве нагружающей массы стальной блок с размерами, формой или массой, соответствующими приведенным на номограммах рисунка 9, то используют блоки с другими формами и размерами. В этом случае значение f3 определяют экспериментально. Чтобы избежать угловых колебаний при возбуждении поступательной вибрации, нагружающая масса должна обладать симметрией, при которой ее основные оси инерции совпадают с осями декартовой системы координат с центром, находящимся в центре нагружающей массы, и направлениями, совпадающими с направлениями нормальной и поперечной вибрации.
Для выполнения данного требования выбирают блоки, изготовленные из однородного материала, имеющие одну из следующих форм: сплошной цилиндр, пустотелый цилиндр, параллелепипед или их сочетание.
Для нахождения значения f3 определяют эффективную массу т2,eff как функцию частоты. При этом в качестве значения f3 принимают минимальное значение частоты, при которой разность между т2,eff и т2 составляет более 12 % (1 дБ).
Затем переходную динамическую жесткость испытуемого объекта вычисляют по формуле (1). Полученные значения будут достоверны только в диапазоне частот f ≤ f3, для которого справедливо неравенство
Метод определения эффективной массы изображен на рисунке 10. На рисунках 10а) и 10b) показаны испытуемые объекты, соединенные с нагружающей массой через область контакта площадью S. В процессе испытаний измеряют ускорения в вертикальном (а2,vert) или горизонтальном (а2,hor) направлениях (в зависимости от направления возбуждения) на входной стороне упругого элемента.
Рисунки 10с) и 10d) соответствуют возбуждению в вертикальном направлении. В отсутствии испытуемого объекта нагружающая масса поддерживается упругими пружинами. Собственная частота этой массово-упругой системы должна быть менее 10 Гц.
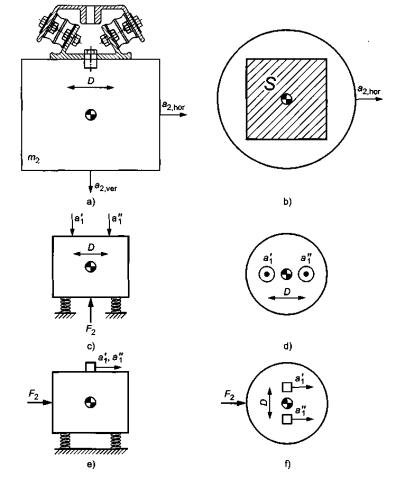
Рисунок 10 - Экспериментальное определение эффективной массы
Со стороны, где в процессе испытаний измеряют а2,vert, прикладывают
вынуждающую силу F2,
направленную через центр нагружающей массы в диапазоне частот испытаний. В пределах
области контакта площадью S симметрично относительно вертикальной
оси, проходящей через центр масс, на расстоянии ![]() друг от друга
устанавливают два акселерометра. Эффективную массу определяют по формуле
друг от друга
устанавливают два акселерометра. Эффективную массу определяют по формуле
![]()
![]() (4)
(4)
Рисунки 10е) и 10f) соответствуют возбуждению в горизонтальном
направлении. Метод аналогичен описанному для возбуждения в вертикальном
направлении, но с приложением вынуждающей силы через центр масс в
горизонтальном направлении и при другом расположении акселерометров (и
направлений измерений ускорения) в области контакта. Расстояние между
акселерометрами должно быть тем же: ![]() Эффективную массу также определяют по формуле (4).
Эффективную массу также определяют по формуле (4).
Если на низких частотах (например, при f < 40 Гц) отклонение т2,eff от т2 превышает 1 дБ, это не следует принимать во внимание при определении f3, поскольку такое отклонение вызвано поведением массово-упругой системы, а не нежесткостью нагружающей массы.
При возбуждении вибрации в горизонтальном направлении особое внимание следует уделить точности расположения вибровозбудителя, чтобы избежать появления нежелательных угловых колебаний. В противном случае оценка, полученная по формуле (4), будет смещена относительно истинного значения, и неравенство (3) не будет выполняться даже на низких частотах.
Измерение сил и ускорений проводят по ГОСТ ИСО 7626-1 и ГОСТ ИСО 7626-2.
Чтобы измерения переходной динамической жесткости можно было проводить в широком диапазоне частот, нижняя граница диапазона f2 должна быть как можно меньше (т.е. нагрузочная масса должна быть большой), а верхняя граница f3 - как можно больше (т.е. нагрузочная масса должна быть минимальных размеров). Поэтому желательно использовать материал с большой плотностью и высокой скоростью распространения волн (такой, как сталь). При необходимости можно использовать различные нагружающие массы, для каждой из которых измерения проводят в своем диапазоне частот.
Примечание - Для облегчения проведения и уменьшения стоимости испытаний по определению значения f3 их можно проводить с применением не реальной нагружающей массы, а ее физической модели. Модель должна быть изготовлена из того же материала и иметь ту же форму, но все ее линейные размеры могут быть в п раз меньше, чем у реальной массы. В этом случае значение f3 для реальной нагружающей массы будет в п раз меньше значения, определенного по результатам испытания модели.
6.3 Вибрация, передаваемая побочным путем
Для многих реальных установок точность метода ограничивается фактом передачи вибрации по побочному пути - по воздуху или по материалу конструкции. При наличии большого разнообразия применяемых установок невозможно установить единый метод контроля путей распространения вибрации. Поэтому метод контроля должен быть установлен самим пользователем настоящего стандарта и указан в протоколе испытаний.
6.4 Нежелательные составляющие входной вибрации
Входная вибрация в направлениях, отличающихся от направления прилагаемого возбуждения, должна быть подавлена согласно 5.3.
Результаты измерений, проведенных в соответствии с требованиями настоящего стандарта, считают достоверными только в том случае, если уровень входного ускорения а в направлении возбуждения превышает уровень ускорения в любом направлении, перпендикулярном к заданному, а' не менее чем на 15 дБ, т.е.
Точки измерений, в которых должно выполняться указанное требование, показаны на рисунке 11.
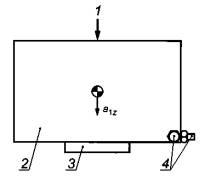
а) Возбуждение в нормальном направлении z
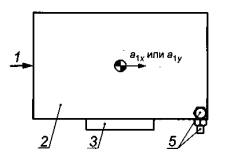
b) Возбуждение в поперечном направлении х или у
1 - вибровозбудитель; 2 - масса распределения возбуждения; 3 - входной фланец испытуемого объекта; 4 - нежелательная вибрация а'1х и а'1y; 5 - нежелательная вибрация a'1z и а'1y или a'1х
Рисунок 11 - Точки измерений для контроля нежелательных составляющих вибрации
При возбуждении в нормальном направлении входная вибрация а1z действует в направлении возбуждения в месте контакта массы распределения возбуждения и входного фланца испытуемого объекта. Нежелательные составляющие а'1х и а'1у следует измерять на краю массы распределения возбуждения в плоскости контакта массы распределения возбуждения и входного фланца испытуемого объекта [см. рисунок 11а)].
Упругие опоры многих типов имеют достаточную симметрию относительно оси нагрузки в нормальном направлении, что обеспечивает динамическую развязку колебаний в нормальном направлении от других составляющих вибрации (см. примечание к 5.1.6 и приложение А).
Если пользователь настоящего стандарта определил, что объект испытаний симметричен, нет необходимости проверять выполнение неравенства (5) для возбуждения в нормальном направлении. В этом случае достаточно указать в протоколе испытаний класс симметрии, которому отвечает испытуемый объект [см. ГОСТ ИСО 10846-1 (приложение В)].
При возбуждении в поперечном направлении х или у входную вибрацию в направлении возбуждения а1х или а1у измеряют вдоль горизонтальной оси симметрии массы распределения возбуждения. Нежелательные составляющие вибрации а'1z и а'1у или а'1z и а'1у измеряют на краю массы распределения возбуждения [см. рисунок 11b)].
Если при наличии массивного входного фланца у испытуемого объекта массу распределения возбуждения не используют (см. примечание к 5.1.6), то должна быть определена схема расположения датчиков, аналогично показанной на рисунке 11, для контроля подавления нежелательных составляющих вибрации в соответствии с неравенством (5).
6.5 Акселерометры
Акселерометры должны быть калиброваны в диапазоне частот измерений и иметь во всем диапазоне частот постоянный коэффициент преобразования в пределах 0,5 дБ. Калибровку проводят по ГОСТ 30652.
Акселерометры не должны быть чувствительными к изменению условий окружающей среды, таких как температура, относительная влажность, магнитные поля. Коэффициент преобразования в поперечном направлении должен быть менее 5 %.
Если вместо акселерометров используют датчики скорости или перемещения, они должны соответствовать тем же требованиям, что и акселерометры.
6.6 Датчики силы
Датчики силы должны быть калиброваны в диапазоне частот измерений и иметь в этом диапазоне постоянный коэффициент преобразования в пределах допуска 0,5 дБ. Калибровку проводят методом нагрузки массой, установленным в ГОСТ ИСО 7626-1.
Датчики силы не должны быть чувствительными к изменению условий окружающей среды, таких как температура, относительная влажность, магнитные поля. Коэффициент преобразования в поперечном направлении должен быть менее 5 %.
6.7 Суммирование сигналов
При необходимости суммирования сигналов с датчиков силы или акселерометров, расширенная неопределенность выполнения данной операции должна быть не более 5 %. Одним из способов выполнения данного требования является применение датчиков одного типа с коэффициентами преобразования, отличающимися друг от друга не более чем на 5 %. Другой способ - выполнять суммирование с помощью многоканального анализатора. В этом случае для компенсации разности коэффициентов преобразований датчиков более 5 % и разности коэффициентов усиления по каждому каналу должны быть введены соответствующие поправки (см. 6.8).
6.8 Анализаторы
Используемые анализаторы сигналов в узкой полосе частот должны соответствовать следующим требованиям:
a) разрешение по частоте должно обеспечивать получение в спектре сигнала, по крайней мере, пяти спектральных линий в третьоктавных полосах частот выше f2;
b) разность частотных характеристик каналов (включая устройства формирования сигналов), используемых для измерений ускорений на входной и выходной поверхностях упругой опоры, должна быть не более 0,5 дБ для измерений с тем же разрешением по частоте, которое используется при испытании упругих опор. В противном случае для компенсации разницы в коэффициентах усиления каналов должны быть введены соответствующие поправки.
Один из способов сравнения коэффициентов усиления каналов заключается в следующем. На вход обоих каналов подают один и тот же широкополосный сигнал (например, белый шум). После этого определяют отношение уровней сигналов в узкой полосе частот, которое должно быть не более 0,5 дБ. Если это условие не выполняется, то полученное отношение используют как корректирующий множитель при измерениях динамической жесткости.
7 Испытания
7.1 Установка испытуемого объекта
Испытуемый объект соединяют с массой распределения возбуждения и нагружающей массой таким образом, чтобы обеспечить надежный контакт с поверхностями этих масс по всей площади фланцев. Те части, которые не являются составной частью упругих элементов в процессе их эксплуатации, должны быть демонтированы.
Примечание 1 - Для улучшения контактов испытуемого объекта с массой распределения возбуждения и нагружающей массой могут применяться консистентная смазка или двусторонняя клейкая лента. Однако в последнем случае это может привести к искажению результатов в области высоких частот. При больших размерах поверхности фланцев ее рекомендуется выровнять для повышения точности измерений.
При испытании виброизоляторов, содержащих элементы из резины, может наблюдаться их медленное проседание под действием нагрузки. В этом случае к опоре должна быть приложена статическая нагрузка до 100 % ее допустимого значения. Измерения можно проводить только после того, как изменение проседания опоры под действием нагрузки будет не более 10 % в день.
Примечание 2 - Датчики для измерения статической нагрузки (деформаций) выбирают с учетом диапазона требуемых нагрузок (деформаций).
Для упругих опор в виде стальных пружин контроль изменения их состояния при предварительном статическом нагружении не проводят.
7.2 Установка акселерометров
Акселерометры устанавливают на входной и выходной сторонах испытуемого объекта для измерения ускорений а1, а2 и а3. Крепление акселерометров должно быть жестким и соответствовать рекомендациям ГОСТ ИСО 5348.
7.3 Установка вибровозбудителя
Для передачи возбуждения от вибровозбудителя к массе распределения возбуждения может потребоваться применение толкателя. Конструкция толкателя должна быть достаточно жесткой, не допускающей появления изгибных колебаний, которые могут снизить точность измерений вследствие появления вибрации в поперечном направлении и излучения звуковой энергии через воздух.
7.4 Генератор сигналов
Генератор сигналов должен производить сигналы одного из следующих видов:
- синусоидальные сигналы с дискретно изменяющимися частотами;
- синусоидальные сигналы с плавной перестройкой по частоте;
- синусоидальные сигналы с периодической перестройкой по частоте;
- широкополосные случайные сигналы.
Производимый сигнал должен быть достаточно длительным для того, чтобы обеспечить его эффективное усреднение. Изменение результата измерений после удвоения времени усреднения должно быть не более 0,1 дБ. При использовании сигналов с дискретным изменением или периодической перестройкой частоты шаг изменения частоты или расстояние между соседними составляющими в спектре сигнала должны быть такими, чтобы при анализе в каждой третьоктавной полосе выше нижней границы диапазоне частот f2 было не менее пяти частотных составляющих.
7.5 Измерения
7.5.1 Общие положения
Измерения проводят для одного или нескольких представительных режимов статического нагружения.
Измерения проводят при одном или нескольких представительных значений температуры окружающего воздуха. В процессе измерений заданное значение температуры контролируют. До проведения испытаний с заданной температурой окружающего воздуха испытуемый объект выдерживают при этой температуре (с расширенной неопределенностью 3 °С) в течение не менее 24 ч.
Если ожидается высокая чувствительность свойств материала испытуемого объекта (например, демпфирования) к изменению температуры или относительной влажности воздуха, на эти параметры устанавливают допуски, позволяющие обеспечить неопределенность измерений по 7.5.3.
Перед испытанием определяют и фиксируют уровень ![]() при отсутствии
возбуждения (фоновый шум). В процессе испытаний создаваемая вибровозбудителем
вибрация должна превышать этот уровень не менее чем на 15 дБ во всех диапазонах
частот измерений.
при отсутствии
возбуждения (фоновый шум). В процессе испытаний создаваемая вибровозбудителем
вибрация должна превышать этот уровень не менее чем на 15 дБ во всех диапазонах
частот измерений.
По результатам измерений ускорения а1 на входной поверхности испытуемого объекта, ускорения а2 на его выходной поверхности и ускорения а3 на основании испытательной установки проверяют соответствие требованиям 6.4. При определении динамической жесткости не учитывают результаты измерений, не соответствующие требованиям 6.4.
7.5.2 Достоверность результатов измерений
Результаты измерений считают достоверными при выполнении следующих условий:
a) поведение испытуемого объекта в диапазоне возбуждения остается приблизительно линейным (см. 7.6);
b) область контакта упругой опоры с источником вибрации и с конструкцией, на которую передается вибрация, можно считать точечной.
Пользователь должен определить диапазон частот, в котором вышеуказанные условия выполняются.
7.5.3 Неопределенность измерений
Стандартное отклонение воспроизводимости переходной динамической жесткости, измеренной в соответствии с настоящим стандартом, должно быть приблизительно 2 дБ (около 26 %).
Примечание - Стандартное отклонение воспроизводимости может зависеть от частоты. Для получения дополнительных сведений о точности метода рекомендуется проводить межлабораторные сравнительные испытания.
Концепция измерения переходной динамической жесткости упругих элементов основана на предположении линейности моделей, описывающих движения этих элементов. В реальных условиях уравнение движения виброизоляторов можно считать линейным только в некотором приближении. Чтобы убедиться в выполнении требования линейности, следует сравнить результаты измерений динамической переходной жесткости, полученные при разных уровнях входного возбуждения.
Проведение проверки линейности в полном объеме - труднореализуемая задача с практической точки зрения, поэтому в настоящем стандарте проверка на линейность ограничена контролем пропорциональности входных и выходных сигналов, т.е. постоянством отношения затормаживающей силы к ускорению (перемещению, скорости) возбуждения (см. 3.11, примечания 1 и 2).
Значения переходной динамической жесткости, определенные по настоящему стандарту, можно считать достоверными только для диапазона возбуждений, который рассматривался при проверке линейности и для которого эта линейность была подтверждена. Верхнюю границу диапазона, для которого данные можно считать достоверными, указывают в протоколе испытаний.
Проверку линейности проводят следующим образом:
a) принимают за спектр А третьоктавный спектр входного сигнала заданного уровня;
b) принимают за спектр В третьоктавный спектр сигнала, уровень которого на 10 дБ ниже, чем для спектра А;
c) если уровни переходной динамической жесткости для возбуждений со спектрами А и В отличаются не более чем на 1,5 дБ, считают, что результаты измерений для уровня входного воздействия равного или ниже, чем в спектре А, являются достоверными;
d) если максимальный уровень спектра А, который может быть достигнут на данной испытательной установке, ниже уровней входных воздействий, которые имеют место при эксплуатации упругой опоры, то эта установка должна быть модифицирована для того, чтобы получить требуемые уровни входного возбуждения - в противном случае используют другую испытательную установку;
e) если проверка по перечислению с) привела к отрицательным результатам, вышеуказанную процедуру следует повторять для более низких уровней входных воздействий до тех пор, пока не будет установлен диапазон, в котором сохраняется постоянный коэффициент пропорциональности между входным и выходным сигналами.
Диапазон линейности должен быть зафиксирован как максимальное значение уровня входного ускорения в третьоктавной полосе частот, для которого проверка линейности дала положительный результат.
Примечание - На основе полученных предельных значений входного воздействия в третьоктавных полосах могут быть дополнительно рассчитаны и представлены другие предельные параметры, например, максимально допустимое среднеквадратичное значение входного перемещения.
Если проверка линейности для данного испытуемого объекта с использованием вышеуказанного критерия дала отрицательный результат, поведение этого объекта следует рассматривать как нелинейное. На такие объекты метод измерений, установленный в настоящем стандарте, не распространяется. Но он может быть использован при оценивании свойств упругой опоры для конкретных условий ее применения, например, при синусоидальном возбуждении с фиксированной амплитудой.
8 Оценка результатов испытаний
8.1 Оценка переходной динамической жесткости
Переходную динамическую жесткость рассчитывают по формуле (1).
На основании измерений передаточной функции T (для тех же ограничений и требований поточности измерений) дополнительно определяют коэффициент потерь η (f) (см. 3.6) по формуле
η (f) = lm {T (f)}/Re{T (f)}. (6)
На высоких частотах упругую опору нельзя рассматривать как безмассовую пружину, поэтому в диапазоне высоких частот величину, получаемую в соответствии с формулой (6), нельзя рассматривать как характеристику демпфирующих свойств опоры (см. ГОСТ ИСО 10846-1).
Если коэффициент потерь мал, то оценка, полученная по формуле (6), становится очень чувствительной к неопределенности измерений. Например, значение коэффициента потерь η(f) = 0,01 соответствует фазовому углу φ = arctg(η) = 0,57° комплексной передаточной функции Т. В этом случае коэффициент потерь рекомендуется определять на основе измерения ширины полосы резонанса колебаний упругой опоры.
8.2 Переходная динамическая жесткость в третьоктавной полосе частот
Значение переходной динамической жесткости, усредненной по частоте в третьоктавной полосе частот, определяют по формуле
 (7)
(7)
где суммирование выполняют по пяти и более частотным составляющим.
Примечание 1 - Суммирование квадрата величины позволяет подчеркнуть пиковые значения динамической жесткости, которые обычно имеют наиболее важное значение.
Примечание 2 - Результат вычисления по формуле (7) хорошо согласуется с данными непосредственного усреднения сигнала анализатором в третьоктавной полосе частот в реальном масштабе времени при условии, что функция спектральной плотности входного перемещения u1 является достаточно плоской.
Примечание 3 - Очевидно, что представление результатов измерений в форме динамической жесткости, усредненной по третьоктавной полосе частот, ведет к потере части информации, в частности, информации о фазе динамической характеристики.
Результат измерений представляют в виде уровня переходной динамической жесткости, усредненной по частоте (см. 3.18).
Среднегеометрическую частоту fm третьоктавной полосы частот определяют по ГОСТ 12090.
8.3 Представление результатов по третьоктавным полосам частот
Данные об уровнях переходной динамической жесткости в третьоктавных полосах частот могут быть представлены в виде таблицы или графика. В таблице указывают среднегеометрические частоты третьоктавных полос и уровни переходной динамической жесткости в децибелах с указанием опорного значения (т.е. 1 Н·м-1).
График частотной характеристики должен содержать:
- вертикальную шкалу в масштабе 20 мм на каждые 10 дБ или в единицах измеряемой величины с шагом, равным степени 101/2;
- горизонтальную шкалу в масштабе 5 мм на третьоктавную полосу.
При печати масштаб может быть увеличен или уменьшен при условии сохранения пропорций. Для удобства восприятия на график может быть нанесена масштабная сетка.
Примечание - Пример представления данных в виде графика приведен на рисунке 12. В дополнение к шкале в децибелах (вертикальная шкала слева) справа приведена вертикальная логарифмическая шкала в ньютонах на метр.
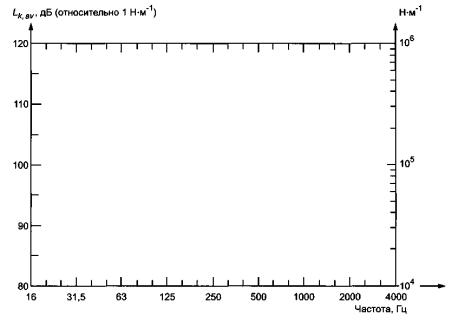
Рисунок 12 - Пример формата графика для представления уровней переходной динамической жесткости в третьоктавных полосах частот
Необходимо точно указывать, для какой динамической характеристики представлены эти данные.
8.4 Представление результатов в узких полосах частот
Дополнительно могут быть представлены сведения об амплитудном и фазовом спектрах переходной динамической жесткости, а также коэффициент потерь.
Пользователь настоящего стандарта должен определить и указать неопределенность измерений представляемых данных.
Результаты измерений модуля динамической жесткости представляют в виде графика с указанием опорного значения (т.е. 1 Н·м-1). Предпочтительным является следующий формат представления данных:
- вертикальная шкала - в масштабе 20 мм на каждые 10 дБ или в единицах измеряемой величины с шагом 101/2;
- горизонтальная шкала - в масштабе 15 мм на октавную полосу.
Примечание - Требования к масштабу графика при печати приведены в 8.3.
Результаты измерений фазы представляют в виде графика. Предпочтительным является следующий формат представления данных:
- вертикальная шкала - в масштабе 40 мм на диапазон от -180° до +180°;
- горизонтальная шкала - в масштабе 15 мм на октавную полосу.
Примечание - Требования к масштабу графика при печати приведены в 8.3.
Результаты измерений коэффициента потерь представляют в виде графика. Предпочтительным является следующий формат представления данных:
- вертикальная шкала - в масштабе 20 мм на изменение коэффициента потерь η в десять раз;
- горизонтальная шкала - в масштабе 15 мм на октавную полосу.
Примечание - Требования к масштабу графика при печати приведены в 8.3.
Необходимо точно указывать, какой динамической характеристике соответствуют представленные данные.
9 Фиксируемые параметры
Должны быть зафиксированы все факторы, оказывающие влияние на результат измерений. В их число могут входить:
- температура окружающего воздуха (и ее изменения в процессе испытаний) в градусах Цельсия;
- статическая нагрузка в ньютонах;
- относительная влажность в процентах.
10 Протокол испытаний
Если испытания проведены в соответствии с требованиями настоящего стандарта, то это должно быть указано в протоколе испытаний. Кроме того, в протоколе испытаний приводят следующую информацию:
a) наименование организации, проводившей испытания;
b) сведения об испытуемом объекте, включая:
- наименование предприятия-изготовителя, модели, обозначение заводского номера;
- описание испытуемого элемента с указанием, какие элементы упругой опоры были подвергнуты испытаниям, а какие перед испытанием были удалены;
- данные о возможности опоры уменьшать передаваемую вибрацию, заявленные изготовителем;
c) фотографию испытуемого объекта и испытательной установки, описание устройства, использованного для создания статической нагрузки;
d) описание массы распределения возбуждения (при ее наличии) и нагружающей массы (размеры, материал, масса), а также способа их соединения с испытуемым объектом;
e) спектры ускорения, используемые для проверок выполнения неравенств (2) и (5) (см. 6.1 и 6.4);
f) условия проведения испытаний:
- температуру окружающего воздуха (и ее изменения в процессе испытаний) в градусах Цельсия;
- статическую нагрузку в ньютонах;
- другие условия, влияющие на результат измерений (например, статический прогиб опоры, наведенные низкочастотные колебания с указанием их амплитуды и частоты);
g) описание сигнала возбуждения;
h) спектр уровней ускорения ![]() (или перемещения,
если оно является измеряемой величиной) на входной стороне испытуемого объекта;
(или перемещения,
если оно является измеряемой величиной) на входной стороне испытуемого объекта;
i) использованные средства измерения и анализа данных с указанием их типа, места расположения, изготовителя, заводского номера, сведений о поверках;
j) результаты измерений переходной динамической жесткости, усредненной в третьоктавных полосах частот;
k) описание условий и результатов проверки на линейность (см. 7.6), включая данные о верхних границах диапазона амплитуд ускорения а1 или перемещения u1 в пределах которых результаты измерений могут считаться достоверными.
Дополнительно в протоколе испытаний могут быть приведены следующие сведения:
l)
результаты измерений величины 10lg
![]() для
определения f3 (см. 6.2.3);
для
определения f3 (см. 6.2.3);
m) узкополосный спектр модуля переходной динамической функции;
n) узкополосный спектр фазы переходной динамической функции;
о) узкополосный спектр коэффициента потерь с указанием (и ссылкой на ГОСТ ИСО 10846-1), что эта величина может считаться достоверной характеристикой диссипативных свойств опоры только в области низких частот, где влияние инерционных сил внутри испытуемого объекта незначительно;
р) кривая статического нагружения (см. приложение В);
q) действительная и мнимая части переходной жесткости;
r) информация о верхней границе диапазона входного возбуждения (например, в виде максимального среднеквадратичного значения перемещения), в пределах которого результаты измерений считают достоверными;
s) допуск на температуру испытуемого элемента, которому соответствует максимальная неопределенность измерений по 7.6.3;
t) относительная влажность воздуха в процентах;
u) описание проверки влияния фонового шума на результат измерений;
v) описание проверки влияния вибрации, передаваемой побочным путем, на результат измерений.
Приложение А
(справочное)
Матрица переходной динамической жесткости для симметричных опор
В общем виде при описании упругих опор измерению подлежат элементы матрицы переходных динамических жесткостей размерностью 6×6 [см. ГОСТ ИСО 10846-1 (5.3 и приложение В)] согласно следующей формуле:
 (A.1)
(A.1)
Элементы матрицы представляют собой отношение составляющей затормаживающей силы на выходной стороне упругой детали к составляющей перемещения на ее входной стороне. Строго говоря, не равной нулю должна быть только одна из составляющих входного перемещения, однако в отношении упругих опор для поступательного движения в нормальном направлении это требование обычно не является обязательным вследствие их симметрии. Это свойство упругих опор снижает влияние на затормаживающую силу в нормальном направлении нежелательных составляющих возбуждения.
На рисунке А.1 показан пример опоры, обладающей свойством симметрии. Матрица переходных динамических жесткостей для опоры данного вида определена формулой
 (А.2)
(А.2)
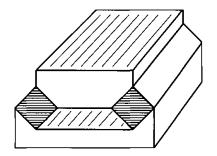
Рисунок А.1 - Упругая опора, для которой матрица переходных жесткостей имеет десять ненулевых членов
Третья строка данной матрицы показывает, что затормаживающая сила в нормальном направлении зависит только от жесткости для поступательного движения в этом же направлении.
В ГОСТ ИСО 10846-1, приложение В, рассмотрены четыре различные формы симметричных опор, используемых на практике, и влияние их формы на вид матрицы переходных динамических жесткостей.
Приложение В
(справочное)
Кривая статического нагружения
При необходимости к протоколу испытаний может быть приложена диаграмма кривой зависимости прогиба опоры от статического нагружения в диапазоне от 0 до 100 % допустимого значения с описанием метода ее получения или ссылкой на соответствующий источник.
Приложение С
(справочное)
Разделы ИСО 10846-3:2002, примененные в настоящем стандарте с модификацией содержания
С.1 Нормативные ссылки
Ссылки на международные стандарты, которые приняты в качестве межгосударственных стандартов, заменены ссылками на соответствующие идентичные и модифицированные межгосударственные стандарты. Полный перечень изменений нормативных ссылок приведен в таблице С.1
Таблица С.1
|
Раздел, подраздел, пункт, подпункт, таблица, приложение |
Модификация |
|
2 Нормативные ссылки |
Ссылка на ИСО 266:1997 «Акустика. Предпочтительные частоты» заменена ссылкой на ГОСТ 12090-80 «Частоты для акустических измерений. Предпочтительные ряды» (NEQ). Ссылка на ИСО 2041:1990 «Вибрация и удар. Термины и определения» заменена ссылкой на ГОСТ 24346-80 «Вибрация. Термины и определения» (NEQ). Ссылка на ИСО 16063-21:2003 «Методы калибровки датчиков вибрации и удара. Часть 21. Вибрационная калибровка методом сличения» заменена ссылкой на ГОСТ 30652-99 (ИСО 5347-3:1993) «Вибрация. Калибровка датчиков вибрации и удара. Часть 3. Вторичная вибрационная калибровка методом сличения» (NEQ). Ссылка на ИСО 5348:1998 «Вибрация и удар. Механическое крепление акселерометров» заменена ссылкой на ГОСТ ИСО 5348-2002 «Вибрация и удар. Механическое крепление акселерометров». Ссылка на ИСО 7626-1:1986 «Вибрация и удар. Экспериментальное определение механической подвижности. Часть 1. Основные определения и преобразователи» заменена ссылкой на ГОСТ ИСО 7626-1-94 «Вибрация и удар. Экспериментальное определение механической подвижности. Основные положения». |
|
2 Нормативные ссылки |
Ссылка на ИСО 7626-2:1990 «Вибрация и удар. Экспериментальное определение механической подвижности. Часть 2. Измерения, использующие одноточечное поступательное возбуждение присоединенным вибровозбудителем» заменена ссылкой на ГОСТ ИСО 7626-2-94 «Вибрация и удар. Экспериментальное определение механической подвижности. Измерения, использующие одноточечное поступательное возбуждение присоединенным вибровозбудителем». Ссылка на ИСО 10846-1:1997 «Вибрация. Измерения виброакустических передаточных характеристик упругих элементов конструкций в лабораторных условиях. Часть 1. Общие принципы измерений и руководство по их проведению» заменена ссылкой на ГОСТ ИСО 10846-1-2002 «Вибрация. Измерения виброакустических передаточных характеристик упругих элементов конструкций в лабораторных условиях. Часть 1. Общие принципы измерений и руководство по их проведению». |
С.2 Исключенное приложение А
Приложение А
(рекомендуемое)
Переходная динамическая жесткость для угловых колебаний
А.1 Общие положения
Все стандарты серии ИСО 10846 распространяются на измерения переходной жесткости только для поступательной вибрации. Однако с помощью косвенного метода, установленного в настоящем стандарте, могут быть измерены также значения переходной жесткости для угловых колебаний.
В настоящем приложении рассматривается теория, принципы измерений и модификация испытательной установки, описанной в разделе 5, позволяющие определить значения переходной жесткости для угловых колебаний.
А.2 Теоретические основы измерений
Для одного упругого изолятора матрица переходной жесткости имеет размерность 6×6 согласно формуле (А.1) (полная матрица жесткости размерностью 12×12 описана в ИСО 10846-1):
 (A.1)
(A.1)
Матрица переходных жесткостей в формуле (А.1) связывает вектор затормаживающих сил и моментов сил на выходной стороне изолятора (левая часть уравнения) с вектором поступательных и угловых перемещений на входной стороне изолятора (правая часть уравнения).
Ортогональная система сил (моментов) и перемещений (поступательных и угловых) изображена на рисунке А.1.
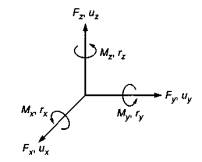
Рисунок А.1 -Декартовая система координат сил, моментов, перемещений и угловых перемещений
В сокращенной форме записи уравнение (А.1) имеет вид
![]() (А.2)
(А.2)
Аналогичное уравнение справедливо, если положение входов и выходов поменять местами, т.е. когда перемещение возбуждают в точке 2, а затормаживающая сила действует в точке 1.
В этом случае формула (А.2) приобретает вид
![]() (А.3)
(А.3)
Исходя из принципа взаимности,
Из формулы (А.4) следует важный практический вывод: если измерения элементов матрицы [k2,1] провести невозможно, их можно заменить измерениями элементов матрицы [k1,2], что аналогично проведению измерений, когда упругая опора перевернута «вверх ногами».
Обычно изоляторы обладают симметрией, что приводит к тому, что число ненулевых элементов в матрице переходной жесткости существенно меньше 36.
На рисунке А.2 показан пример упругой опоры, для которой в матрице переходной жесткости ненулевыми остаются только десять элементов (см. ИСО 10846-1:1997, приложение В):
 (А.5)
(А.5)
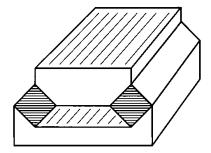
Рисунок А.2 - Упругая опора, для которой матрица переходных жесткостей имеет десять ненулевых членов
Эти десять ненулевых элементов можно разбить на три следующие группы.
a) Диагональные элементы для поступательных составляющих движения
Метод
косвенного измерения трех диагональных элементов матрицы (![]() ,
, ![]() и
и ![]() ) рассмотрен в настоящем стандарте и поэтому в настоящем
приложении не рассматривается;
) рассмотрен в настоящем стандарте и поэтому в настоящем
приложении не рассматривается;
b) недиагональные элементы, включающие в себя одну поступательную и одну угловую компоненты
Четыре недиагональных элемента матрицы (![]() ,
, ![]()
![]() и
и ![]() ) могут быть измерены косвенным методом с помощью
испытательной установки, описанной в разделе 5.
Принцип измерений рассмотрен в разделе А.3;
) могут быть измерены косвенным методом с помощью
испытательной установки, описанной в разделе 5.
Принцип измерений рассмотрен в разделе А.3;
c) диагональные элементы для угловых составляющих движения
Измерение
трех диагональных элементов матрицы (![]() ,
,![]() и
и ![]() ) может быть выполнено косвенным методом. Однако для этого
испытательная установка, описанная в разделе 5, должна
быть модифицирована. Принцип измерений рассмотрен в разделе А.4.
) может быть выполнено косвенным методом. Однако для этого
испытательная установка, описанная в разделе 5, должна
быть модифицирована. Принцип измерений рассмотрен в разделе А.4.
А.3 Переходная жесткость для одной поступательной и одной угловой компонент
Недиагональные элементы матрицы переходной жесткости, заданной формулой (5), могут быть измерены косвенным методом на испытательной установке, предназначенной для возбуждения поперечной составляющей движения и описанной в 5.2. Требования к симметрии нагружающей массы - по разделу 6.
Для
измерений ![]() и
и ![]() упругую опору
устанавливают и возбуждают тем же способом, что и при измерениях
упругую опору
устанавливают и возбуждают тем же способом, что и при измерениях ![]() и
и ![]() Однако в данном случае помимо затормаживающих сил должны быть
измерены также затормаживающие моменты М2y,b и М2x,b.
Однако в данном случае помимо затормаживающих сил должны быть
измерены также затормаживающие моменты М2y,b и М2x,b.
Способ их измерения показан на рисунке А.3.
Согласно рисунку А.3 (слева) на нагружающую массу одновременно действуют затормаживающая сила F2x,b и затормаживающий момент М2y,b. Входная сторона объекта испытаний возбуждается с ускорением а1х.
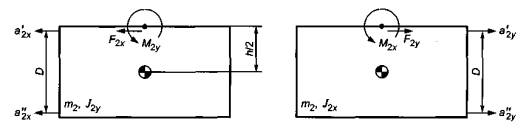
![]()
Рисунок А.3 - Одновременное измерение поступательного и углового отклика нагружающей массы
Предполагая, что нагружающая масса т2 колеблется как жесткое тело, затормаживающий момент может быть определен по формуле (см. рисунок А.3)
![]() (A.6)
(A.6)
где J2y - главный момент инерции нагружающей массы относительно, оси у;
- (2πf)2u2x - поступательное ускорение, приложенное к центру нагружающей массы.
Как показано на рисунке А.3, поступательная и угловые составляющие ускорения могут быть определены суммированием или вычитанием сигналов с двух симметрично расположенных акселерометров.
Для получения более точных результатов оценку рекомендуется осуществлять на основе измерений передаточной функции, подобно тому, как это сделано для поступательного движения в формуле (1). Например:

где
или
Примечание - Поскольку передаточная функция как для перемещения, так и для ускорения будет одной и той же, то для получения оценки по формуле (А.7) достаточно проводить измерения только ускорений согласно формуле (А.8) или (А.9).
Формулой (А.8) удобно пользоваться при измерениях сигнала с помощью двухканального анализатора с аналоговым устройством вычитания а"2x из а'2х. Формулу (А.9) применяют при раздельных измерениях передаточных функций а'2х/а1х и а"2х/а1х.
Для измерений недиагональных элементов ![]() и
и ![]() можно использовать ту
же испытательную установку, что и для измерений
можно использовать ту
же испытательную установку, что и для измерений ![]() и
и ![]() . Однако в данном случае испытуемую упругую опору следует
повернуть «вверх ногами», т.е. поменять местами входную и выходную стороны.
Исходя из соотношения (А.4), измерение
. Однако в данном случае испытуемую упругую опору следует
повернуть «вверх ногами», т.е. поменять местами входную и выходную стороны.
Исходя из соотношения (А.4), измерение ![]() заменяют измерением
заменяют измерением ![]() , а измерение
, а измерение ![]() - измерением
- измерением ![]() . При установке испытуемого объекта «вверх ногами»
диагональные элементы матрицы остаются неизменными [см. формулу (А.4)].
. При установке испытуемого объекта «вверх ногами»
диагональные элементы матрицы остаются неизменными [см. формулу (А.4)].
А.4 Переходная жесткость для двух угловых компонент
Диагональные элементы матрицы (А.5) ![]()
![]() и
и ![]() не могут быть
измерены до тех пор, пока испытательная установка, описанная в разделе 5, не
будет соответствующим образом модифицирована. Модификация установки относится
только к способу возбуждения вибрации на входной стороне упругой опоры, в то
время как измерения на выходной стороне остаются аналогичными описанным в А.3.
не могут быть
измерены до тех пор, пока испытательная установка, описанная в разделе 5, не
будет соответствующим образом модифицирована. Модификация установки относится
только к способу возбуждения вибрации на входной стороне упругой опоры, в то
время как измерения на выходной стороне остаются аналогичными описанным в А.3.
Простейший способ модифицировать испытательную
установку для измерения ![]() - рассматривать ось z
как
направление приложения статической нагрузки (см. рисунки 2 - 4). Для
испытуемого объекта, изображенного на рисунке А.2,
возбуждение γ1z может быть обеспечено путем использования
испытательной установки подобной приведенной на рисунке 4. Для этого вместо
одного вибровозбудителя, создающего вибрацию в поперечном направлении и
расположенного симметрично относительно испытуемого объекта, используют либо
вибровозбудитель, расположенный ассиметрично, либо, - что, как правило,
используют более часто, - пару вибровозбудителей. В первом случае появляется
также составляющая u1y или u1x, что, однако, для
объекта, изображенного на рисунке А.2, нельзя рассматривать как нежелательную
вибрацию, поскольку согласно формуле (А.5) соответствующие этой составляющей
переходные динамические жесткости
- рассматривать ось z
как
направление приложения статической нагрузки (см. рисунки 2 - 4). Для
испытуемого объекта, изображенного на рисунке А.2,
возбуждение γ1z может быть обеспечено путем использования
испытательной установки подобной приведенной на рисунке 4. Для этого вместо
одного вибровозбудителя, создающего вибрацию в поперечном направлении и
расположенного симметрично относительно испытуемого объекта, используют либо
вибровозбудитель, расположенный ассиметрично, либо, - что, как правило,
используют более часто, - пару вибровозбудителей. В первом случае появляется
также составляющая u1y или u1x, что, однако, для
объекта, изображенного на рисунке А.2, нельзя рассматривать как нежелательную
вибрацию, поскольку согласно формуле (А.5) соответствующие этой составляющей
переходные динамические жесткости ![]() и
и
![]() будут
равны нулю. Способ возбуждения вибрации входной стороны изолятора для измерений
будут
равны нулю. Способ возбуждения вибрации входной стороны изолятора для измерений
![]() и
и ![]() показан на рисунке
А.4.
показан на рисунке
А.4.
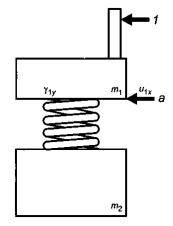
1 - вибровозбудитель; а - подавление поперечной вибрации
Рисунок А.4 - Возбуждение угловых колебаний с одновременным подавлением поперечной вибрации колебаний на входной стороне упругой опоры
Входную сторону испытуемого объекта нагружают жестким блоком, симметрия которого аналогична указанной для нагружающей массы т2 в разделе 6. С помощью соответствующего плеча силы возбуждают вибрацию в поперечном направлении таким образом, чтобы максимизировать отношение γ1х/и1y или γ1y/и1x. Для приложения статической нагрузки между верхней массой и рамой устанавливают дополнительные изоляторы подобно тому, как это изображено на рисунке 2. Для измерений γ1х или γ1y используют пару акселерометров в соответствии с рисунком А.3.
Если подавить поступательную вибрацию в поперечном направлении (и1x или и1y) не удается, проводят несколько измерений для разных плеч приложения вибрационной нагрузки. При каждом измерении получают разные сочетания γ1х и и1y или γ1y и и1x. В этом случае используют способ получения искомых значений элементов переходной динамической жесткости, проиллюстрированный нижеследующими примерами.
Пример 1 - После двух проведенных экспериментов получены следующие результаты (цифра в скобках обозначает номер эксперимента):
![]() (А.10)
(А.10)
![]() (А.11)
(А.11)
Эти уравнения можно представить в виде:
![]() (A.12)
(A.12)
![]() (A.13)
(A.13)
В правой части уравнений результаты измерений выражены в виде передаточной функции также, как это было сделано в формулах (А.7) и (А.8), т.е. через отношение R = γ1x/u1y. Для практического получения передаточной функции может быть использован двухканальный анализатор с аналоговым устройством суммирования [см. также примечание к формуле (А.9)].
Теперь вектор элементов матрицы переходной динамической жесткости может быть получен через обращенную матрицу передаточных функций:
 (A.14)
(A.14)
Известно, что в случае обращения плохо обусловленной матрицы намного возрастает влияние ошибок измерений на получение конечного результата. Поэтому эксперимент должен быть спланирован так, чтобы число обусловленности матрицы передаточных функций, выражаемое формулой
 (A.15)
(A.15)
было не более трех (здесь для сокращения записи были использованы подстрочные индексы для передаточной функции R). Это требование выполняется при одновременном выполнении следующих двух условий:
![]() (А.16)
(А.16)
![]() (А.17)
(А.17)
Знак минуса в формуле (А.16) означает, что сигналы γ1х и u1у находятся в противофазе.
Пример 2 - Настоящий пример приведен для того, чтобы дать представление о том, как правильно спланировать испытания, чтобы получить необходимые значения передаточных функций R (1) ≈ -1,5 м-1 и R (2) ≈ 1,5 м-1. На рисунке А.5 показаны два способа передачи воздействия на блок распределения возбуждения на входной стороне испытуемого объекта. Этот блок выполнен в форме жесткого цилиндра диаметром d и высотой h. Предполагается, что масса блока и его момент инерции велики по сравнению с теми же характеристиками входного фланца испытуемого объекта, и что в первом приближении можно считать, что в диапазоне частот измерений блок колеблется как свободное тело. Тогда горизонтальное возбуждение, показанное на рисунке А.5а), силой Fy, приложенной в точке с положительной координатой по оси z (если за нулевую точку принять положение центра масс блока), будет создавать колебания, характеризующиеся отрицательным значением передаточной функции.
Наоборот, возбуждение, показанное на рисунке А.5b), силой Fy, приложенной в точке с отрицательной координатой z, будет создавать вибрацию с положительной передаточной функцией.
Для блока указанной формы и размеров справедливы следующие соотношения:
![]() (А.18)
(А.18)
![]() (A.19)
(A.19)
где α = z/h,b = d/2h.
На рисунке А.6 приведены номограммы для выбора размеров цилиндрического блока и положения точки приложения силы в диапазоне - h < z < h при значениях R (1) = - 1,5 м-1 и R(2) = 1,5 м-1. Если точка приложения силы выходит за пределы размеров блока, то для удлинения плеча силы используют вспомогательный рычаг.
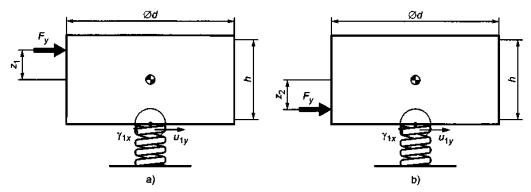
Рисунок А.5 - Пример двух разных способов приложения силы к блоку распределения возбуждения на входной стороне испытуемого объекта
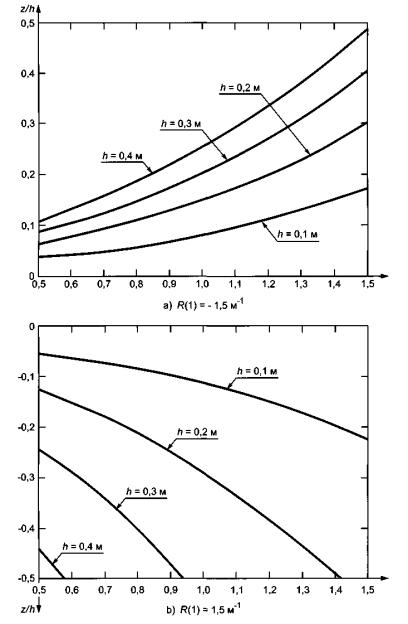
Рисунок А.6 - Номограммы зависимостей (А.16) и (А.17)
Приложение D
(справочное)
Сравнение структуры международного стандарта со структурой межгосударственного стандарта
Таблица D.1
|
Структура международного стандарта ИСО 10846-3:2002 |
Структура настоящего стандарта |
|
Приложение А |
- |
|
Приложение В |
Приложение А |
|
Приложение С |
Приложение В |
|
Примечание - Структурные элементы настоящего стандарта и международного стандарта ИСО 10846-3:2002, не указанные в данной таблице, идентичны. |
|
Ключевые слова: вибрация, виброизолирующие опоры, механические свойства, испытания, динамическая жесткость, измерения