НАУЧНО-ИССЛЕДОВАТЕЛЬСКИЙ
ИНСТИТУТ
СТРОИТЕЛЬНОГО ПРОИЗВОДСТВА ГОССТРОЯ УССР
МЕТОДИЧЕСКИЕ РЕКОМЕНДАЦИИ
ПО ТЕХНОЛОГИИ ПОГРУЖЕНИЯ СВАЙ ВДАВЛИВАНИЕМ
Одобрены Ученым советом НИИСП Госстроя УССР Протокол № 11 от 24.11.87
КИЕВ 1988
Содержание
Даны методические рекомендации по технологии погружения свай вдавливанием, по выбору и определению технологических параметров сваевдавливающего оборудования с вакуумным анкерным устройством. Приведены описание конструкции и работы нового сваевдавливающего оборудования, требования по технике безопасности при его использовании.
Для инженерно-технических работников проектных и строительных организаций.
Разработали канд. техн. наук С.В. Романов, инженеры Г.Я. Яременко, Ю.Н. Глушенко, О.В. Литвин, А.Е. Рубач (НИИСП Госстроя УССР) при участии инженеров Л.И. Филоненко и В.И. Лирника (трест Укрпромспецстрой Минстроя УССР).
1. ОБЩИЕ ПОЛОЖЕНИЯ
1.1. Методические рекомендации разработаны на основе выполненных в НИИСП Госстроя УССР экспериментальных и теоретических исследований, а также обобщения результатов отработки технологии погружения свай в натурных условиях на экспериментальном и опытном образцах сваевдавливающего оборудования с вакуумным анкером.
1.2. Рассматриваемая технология вдавливания свай основывается на применении нового оборудования, для работы которого используется давление земной атмосферы. Реактивные усилия, возникающие при вдавливании свай, в этом оборудовании воспринимаются специальным устройством - вакуумным анкером.
1.3. Приведена методика определения возможности применения и основных технологических параметров сваевдавливающего оборудования с вакуумным анкером в конкретных условиях строительства, получения необходимых данных для разработки рабочих чертежей фундаментов из вдавливаемых свай и составления ППР и ПОС,
1.4. Отличия вдавливаемых железобетонных свай от забивных связаны с технологией погружения свай и с методом контроля несущей способности: при забивке - по отказу, при вдавливании - по усилию вдавливания.
1.5. При применении технологии погружения свай сваевдавливающим оборудованием с вакуумным анкерным устройством следует руководствоваться требованиями СНиП 3.02.01-83, СНиП III-4-80 и настоящих Методических рекомендаций.
2. НАЗНАЧЕНИЕ И ОБЛАСТЬ ПРИМЕНЕНИЯ
2.1. Технология погружения свай вдавливанием сваевдавливающим оборудованием с вакуумным анкером предназначена для возведения фундаментов из железобетонных свай в жилищно-гражданском, промышленном и сельском строительстве, а также для вдавливания шпунта и других подобных элементов.
2.2. Наиболее эффективной областью применения рассматриваемой технологии является погружение сборных железобетонных свай вблизи или внутри существующих знаний и сооружений, в оползневых зонах, вблизи больниц, театров, учебных заведений и в других местах, не допускающих высокого уровня динамических и шумовых воздействий.
2.3. Применение технологии может быть эффективным и в обычных условиях строительства благодаря более высокой по сравнению с забивкой свай молотами производительности, исключению разрушения голов свай, повышению точности и снижению энергоемкости их погружения, возможности замера несущей способности каждой погружаемой сваи, улучшению условий труда рабочих.
2.4. Применение технологии погружения свай вдавливающим оборудованием с вакуумным анкером имеет следующие ограничения: длина свай - не более 16 м; общее сопротивление грунтов вдавливанию свай - не более 900 кН; грунты, слагающие площадку строительства с поверхности до глубины более 1,5 м, - нескальные, за исключением мелких, средней крупности и крупных песков и крупнообломочных грунтов, проницаемость которых К > 2 дарси; поверхность грунта - спланированная бульдозером площадка строительства без твердого покрытия, слоя мерзлого грунта, крупных твердых включений, препятствующих погружению стенок вакуумного анкера в грунт на глубину 0,1-0,2 м.
2.5. Минимальные размеры площадки, необходимые для работы сваевдавливающего оборудования с вакуумным анкером, 15×15 м.
Наименьшее расстояние вдавливаемых свай от существующих зданий и сооружений (от оси сваи до стены) при высоте стены более 18 м - 1 м, менее 18 м - 0,5 м.
3. ОБОРУДОВАНИЕ С ВАКУУМНЫМ АНКЕРНЫМ УСТРОЙСТВОМ ДЛЯ ПОГРУЖЕНИЯ СВАЙ ВДАВЛИВАНИЕМ
3.1. Сваевдавливающее оборудование с вакуумным анкерным устройством является навесным оборудованием к кранам МКГ-25 или РДК-25 и представляет собой мобильный полноповоротный сваевдавливающий агрегат. Разработаны два варианта сваевдавливающего оборудования: СВО-В-1 и СВО-В-2.
3.2. Сваевдавливающий агрегат с навесным оборудованием СВО-В-1 (рис. 1) включает базовую машину, на которой посредством копровой мачты и опорной балки подвешена упорная рама со смонтированным на ней посредством двух гидроцилиндров вакуумным анкером, соединенным всасывающими шлангами с вакуумным насосом. В передней части упорной рамы имеются блоки неподвижной части полиспастной системы, блоки подвижной обоймы полиспаста расположены на наголовнике, подвешенном на копровой стойке и имеющем возможность перемещаться по ее направляющим. На опорной балке посредством гидроцилиндров смонтированы опорные плиты и размещена гидростанция.
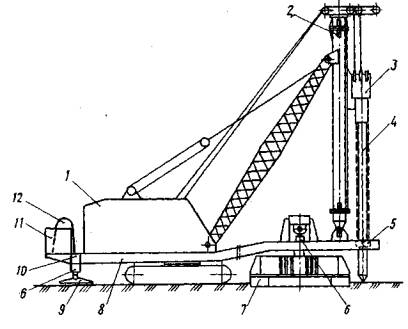
Рис. 1. Схема сваевдавливающей установки СВО-В-1.
1 - базовая машина; 2 - копровая мачта; 3 - наголовок с блоком полиспастов; 4 -
свая; 5 - блок неподвижной части полиспаста; 6 - гидроцилиндр; 7 - вакуумный
анкер; 8 - упорная рама; 9 - опорные плиты; 10 - опорная балка с площадной; 11
- гидравлическая станция; 12 - вакуумный насос
Копровая мачта представляет собой трубчатый элемент с направляющими из уголков. В верхней части мачты смонтирован кронштейн с блоками для трех канатов грузовых лебедок (один канат запасовывается в полиспастную систему для вдавливания свай, другой - для подъема наголовника в верхнее положение, третий - для подтаскивания и подъема сваи. Мачта служит для подвешивания упорной рамы на стреле крана и направляющей для наголовника.
Упорная рама представляет собой сварную конструкцию, состоящую из двух продольных балок коробчатого сечения, в передней части связанных поперечными балками, поверх которых уложен настил. Для уменьшения длины рамы при транспортировании в продольных балках имеется фланцевое соединение. Рама служит для передачи реактивных усилий, возникающих при вдавливании сваи, на вакуумный анкер.
Вакуумный анкер представляет собой сварную прямоугольную металлическую камеру, в нижней наружной части которой имеется защитный металлический фартук. Крышка камеры выполнена в виде подвижной диафрагмы, которая посредством прорезиненной ткани герметично соединяется со стенками камеры. На диафрагме смонтирован четырехзвеньевой шарнирный механизм.
Наголовник представляет собой сварную листовую конструкцию, на одном конце которой находится гнездо для размещения тензодинамометра и установки сваи, а на другом закрепляются блоки подвижной обоймы полиспаста. Наголовник предназначен для передачи усилия вдавливания от полиспастной системы на голову сваи.
Опорная балка представляет собой сварную конструкцию коробчатого сечения, в которой имеются гнезда для установки аутригеров, проушины для соединения с поворотной платформой крана, а также площадка для размещения гидростанции и вакуумного насоса, Опорная балка предназначена для соединения хвостовой части упорной рамы с поворотной платформой крана, передачи опорных реакций на опорные плиты (аутригеры), размещения гидростанции и вакуумного насоса.
Гидростанция предназначена для привода гидроцилиндров, соединяющих упорную раму с вакуумным анкером и опорную балку с опорными плитами.
3.3. СВО-В-1 работает следующим образом. С помощью гидроцилиндров вакуумный анкер и опорные плиты опускаются на поверхность грунта. Под наголовник устанавливается свая, включается вакуумной насос, который откачивает воздух из камеры вакуумного анкера, создавал усилие, прижимающее диафрагму анкера к грунту. При включении в работу лебедки крана усилие от ее каната передается через полиспастную систему на голову сваи и подвижная обойма полиспаста вместе с наголовником перемещается вниз (вдавливает сваю). Реактивные усилия при этом передаются через неподвижные блоки полиспаста, упорную раму и гидроцилиндры на диафрагму вакуумного анкера. Упорная рама здесь работает как рычаг, точкой опоры которого являются опорные плиты (рис. 2).

Рис. 2. Схема распределения усилий при погружении свай агрегатом
с навесным оборудованием:
1 - свая; 2 - канаты полиспаста; 3 - упорная рама; 4 - вакуумный анкер; Рвд
- вдавливающее усилие, передаваемое на голову сваи через наголовник от
подвижного блока полиспаста; Rр -реактивное усилие, передаваемое на раму через
канаты полиспаста; Rа
- реакция в раме от анкера; Ron - реакция
в раме от опорных плит
3.4. Техническая характеристика сваевдавливающего оборудования СВО-В-1 следующая:
|
Наибольшее усилие вдавливания, кН |
900 |
|
Скорость вдавливания сваи, м/мин |
2,0-2,5 |
|
Наибольшая длина цельных погружаемых свай, м |
16 |
|
Сечение погружаемых свай, м |
0,3×0,3 |
|
Производительность (для свай длиной 16 м), сваи в смену |
12 |
|
Габаритные размеры, м: |
|
|
длина |
12,5 |
|
ширина |
5,5 |
|
высота |
22,0 |
|
Масса навесного оборудования, кг |
22500 |
|
Наименьшее расстояние от оси погружаемых свай до стены существующего здания, м |
0,6 |
|
Количество обслуживающего персонала, чел |
3 |
3.5. Сваевдавливающая установка с навесным оборудованием СВО-В-2 (рис. 3) включает базовую машину (кран МКГ-25 или РДК-25) со смонтированной на ней посредством стрелового пальца и распорки рамой, на которой с помощью двух гидроцилиндров подвешен вакуумный анкер с вакуумным насосом, установлена копровая мачта с подкосом и смонтирована лебедка для подъема рабочего органа, подвешенного на копровой мачте и перемещающегося вдоль нее по направляющим. На задней части поворотной платформы крана смонтирована опорная балка, на которой размещены гидростанция, электрический щит управления и посредством гидроцилиндров смонтированы опорные плиты.
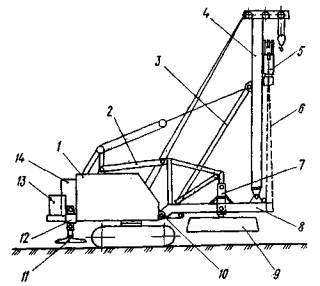
Рис. 3. Схема сваевдавливащей установки СВО-В-2:
1 - базовая машина; 2 - распорки; 3 - подкос; 4 - копровая мачта; 5 - рабочий
орган; 6 - тросовая система; 7 - гидроцилиндры; 8 - рама; 9 -вакуумный анкер;
10 - стреловой палец; 11 - опорные плиты; 12 - опорная балка; 13 -
гидростанция; 14 - щит управления
Рама представляет собой сварную конструкцию, состоящую из двух продольных балок коробчатого сечения, связанных поперечными балками и усиленных фермами из трубчатых элементов. Рама предназначена для размещения на ней рабочего оборудования и копровой мачты, а также для передачи реактивных усилий, возникающих при вдавливании сваи, на вакуумный анкер и на оперные плиты.
Устройство и назначение других составных частей СВО-В-2 аналогичны их устройству и назначению в СВО-В-1.
3.6. Работа агрегата с навесным оборудованием СВО-В-2 аналогична работе СВО-В-1. Отличие состоит в том, что при передаче реактивного усилия на вакуумный анкер совместно с рамой в работу включаются силовые конструкции поворотной платформы крана, т.е. используется масса базовой машины (рис. 4).
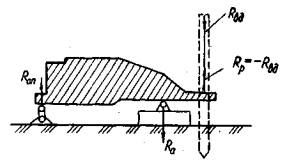
Рис. 4. Схема распределения усилий при погружении свай агрегатом
с навесным оборудованием СВО-В-2:
Rвд
- вдавливающее усилие, передаваемое на голову сваи; Rр -
реактивное усилие, передаваемое на раму через тросовую систему; Rd - реакция в раме от вакуумного анкера; Ron - реакция в раме поворотной платформы крана от опорных
плит
3.7. Техническая характеристика оборудования СВО-В-2 следующая:
|
Наибольшее усилие вдавливания, кН |
1000 |
|
Скорость вдавливания сваи, м/мин |
2...2,5 |
|
Наибольшая длина цельных погружаемых свай, м |
16 |
|
Сечение погружаемых свай, м |
0,3×0,3; 0,35×0,35; 0,4×0,4 |
|
Габаритные размеры, м: |
|
|
длина |
12,5 |
|
ширина |
3,0 |
|
высота |
16,8 |
|
Масса навесного оборудования, т |
19,5 |
|
Наименьшее расстояние от оси погружаемых свай до стены существующего здания, м |
0,5 |
|
Количество обслуживающего персонала, чел |
3 |
3.8. В соответствии с условиями транспортирования навесное сваевдавливающее оборудование поставляется потребителю демонтированным на пять основных частей: упорную раму, вакуумный анкер, копровую мачту, опорную балку, наголовник (рабочий орган).
3.9. Установка с СВО-В-1 монтируется с помощью крана грузоподъемностью 100-160 кН следующим образом: на вакуумный анкер устанавливается упорная рама путем соединения гидроцилиндров, расположенных на диафрагме вакуумного анкера с рамой; копровая мачта посредством проушин, приваренных к ней, и пальца подвешивается на стреле крана; кран с подвешенной на стреле копровой мачтой заезжает между продольными балками рамы; копровая мачта устанавливается пятой в проушины на упорной раме и закрепляется в них с помощью пальца; выполняется запасовка тяговых канатов с одновременной установкой наголовника на копровой мачте; опорная балка надевается на хвостовую часть продольных балок рамы и с помощью пальцев и проушин соединяется с поворотной платформой крана; производится соединение трубопроводов гидропривода и подсоединение всасывающего шланга к вакуумному анкеру.
3.10. Установка с СВО-В-2 монтируется следующим образом: рама устанавливается на вакуумный анкер, гидроцилиндры, расположенные на раме, соединяются с диафрагмой вакуумного анкера; кран без стрелы приближается к раме, которая соединяется с поворотной платформой крана с помощью распорки и пальца в стреловых проушинах; на задней части поворотной платформы крана монтируется опорная балка; копровая мачта с подкосом устанавливается пятой в проушины на раме, стреловой канат соединяется с проушиной на копровой мачте и натяжением стрелового каната мачта устанавливается в вертикальное положение и фиксируется закреплением подкоса на раме; устанавливается рабочий орган на копровой мачте и осуществляется запасовка тросовой системы; производится сборка гидропривода.
3.11. Подготовка сваевдавливающего оборудования к работе сводится к выполнению следующих операций; гидростанция и вакуумный анкер подключаются к источнику электроэнергии; гидросистема заполняется маслом; оборудование очищается от пыли и грязи, попавших при транспортировании или хранении; на диафрагме и корпусе вакуумного анкера устанавливаются вакуумметры, а в гидросистеме - манометры; тензодинамометр, установленный в наголовнике, соединяется с регистрирующей аппаратурой.
4. ТЕХНОЛОГИЯ ПОГРУЖЕНИЯ СВАЙ ВДАВЛИВАНИЕМ С ПОМОЩЬЮ СВАЕВДАВЛИВАЮЩЕГО ОБОРУДОВАНИЯ С ВАКУУМНЫМ АНКЕРОМ
4.1. Погружение свай вдавливающим оборудованием должно осуществляться в строгом соответствии с проектом свайных фундаментов и ППР, которые разрабатываются с учетом требований строительных норм и правил по производству и приемке работ по устройству оснований и фундаментов и настоящих Методических рекомендаций.
4.2. Состав подготовительных работ к погружению свай вдавливанием аналогичен составу работ при погружении свай другими методами и включает разработку котлована, подготовку временных подъездных путей, разбивку и закрепление на местности осей здания, завоз и складирование свай и др. (приложение 1).
4.3. Для обеспечения нормальных условий работы вакуумного анкерного устройства в грунтах, представленных с поверхности дна котлована глинами, суглинками (кроме твердой консистенции), супесями, неводонасыщенными пылеватыми песками и песками глинистыми, а также в насыпных грунтах, не имеющих твердых включений, достаточно выполнить планировку дна котлована бульдозером.
Если в грунтах встречаются твердые включения в виде валунов, крупного щебня, обломков железобетона и др., то такие грунты должны быть удалены на глубину 0,4-0,5 м от дна котлована и заменены слоем однородных уплотненных грунтов супеси, суглинка или глины.
Если грунты на поверхности представлены твердыми глинами или суглинками, то для погружения в них ножей анкера на глубину 0,10-0,15 м необходимо увлажнением довести их консистенцию на поверхности до полутвердой или отсыпать сверху слой супеси, суглинка или глины толщиной 0,10-0,15 м.
В грунтовых условиях, когда на поверхности залегают пески или другие сильнопроницаемые грунты (с проницаемостью К > 2 дарси), для обеспечения работоспособности вакуумного анкера необходимо от отметки, с которой производится погружение свай, снять слой слабопроницаемого грунта (супеси, суглинка, глины) толщиной 0,8-1,0 м.
Для предотвращения выпирания грунта под плитой анкерного устройства расстояние от отметки дна котлована до уровня грунтовых вод должно удовлетворять условии)
 (1)
(1)
где п - пористость грунта; Ратм
- атмосферное давление, Па; Рвак - давление в вакуумной
камере, Па; ![]() - удельное сцепление
грунта, Па; g - удельный вес грунта, Н/м3.
- удельное сцепление
грунта, Па; g - удельный вес грунта, Н/м3.
4.4. Технологические показатели работы вакуумного анкера (степень разрежения в вакуумной камере, анкерующее усилие и др.) зависят от инженерно-геологических и гидрогеологических условий площадки и в каждом конкретном случае могут быть определены в соответствии с указаниями пп. 5.1.-5.12.
4.5. Основной технологический процесс погружения свай сваевдавливающим оборудованием с вакуумным анкером включает следующие операции: перемещение агрегата на точку погружения сваи; опускание вакуумного анкера и опорных плит; строповку, подъем и установку сваи на точку погружения; включение в работу вакуумного анкера; вдавливание сваи; выключение из работы и подъем вакуумного анкера.
4.6. Операции при погружении свай вдавливанием выполняются в очередности, приведенной в приложении 2. Там же приведен состав обслуживающего персонала.
4.7. Перемещение агрегата на точку вдавливания очередной сваи осуществляется при поднятых в верхнее положение вакуумном анкере и опорных плитах. Наведение рабочего органа на точку погружения сваи можно осуществлять посредством передвижения крана вперед-назад и поворота платформы крана. Операция перемещения агрегата на точку вдавливания выполняется машинистом при участии двух копровщиков, в функции которых входит наблюдение за перемещением и подача необходимых сигналов машинисту.
Для обеспечения надежной работы сваевдавливающего агрегата рекомендуется перемещать его по площадке с помощью металлических сланей.
4.8. После перемещения агрегата на точку вдавливания выполняется строповка, подтаскивание, подъем и установка сваи на точку погружения. Эти операции практически ничем не отличаются от операций, выполняемых при погружении свай сваебойными агрегатами.
4.9. После установки сваи на точку погружения вакуумный анкер и опорные плиты опускаются на поверхность грунта.
Одновременно с этим копровая мачта приводится в вертикальное положение за счет регулирования выхода штоков гидроцилиндров. При этом штоки гидроцилиндров, соединяющих вакуумный анкер с рамой, выдвигаются до тех пор, пока не прекратится погружение в грунт ножей анкера под давлением оборудования.
Необходимым условием завершения операции опускания анкера является отсутствие просветов между поверхностью грунта и ножами анкера, т.е. ножи должны быть погружены в грунт хотя бы на минимальную глубину (1,0-1,5 см).
4.10. Операция по включению в работу вакуумного анкера осуществляется нажатием кнопки включателя электродвигателя вакуумного насоса, откачивающего воздух из вакуумной камеры анкера. За счет этого давление в камере уменьшается и под действием прижимающего усилия от атмосферного давления стенки корпуса могут дополнительно погружаться в грунт. Поэтому одновременно с включением в работу вакуумного насоса необходимо привести штоки гидроцилиндров, соединяющих анкер с рамой, в режим свободного выхода и поддерживать их в таком режиме до установления в камере анкера стабильного разрежения, которое контролируется по показаниям вакууметра, установленного на диафрагме анкера.
4.11. По степени разрежения в вакуумной камере контролируется отрывающее усилие, которое может воспринять вакуумный анкер, и определяется вдавливающее усилие на голову сваи, которое может быть достигнуто при данной степени разрежения (табл. 1).
Таблица 1. Зависимость анкерующего эффекта и вдавливающего усилия от степени разрежения в вакуумной камере анкера
|
Наименование показателей |
Показания вакууметра на диафрагме, доли единицы |
|||||||
|
0,1 |
0,2 |
0,3 |
0,4 |
0,5 |
0,6 |
0,7 |
0,8 |
|
|
Анкерующий эффект, кН |
250 |
400 |
550 |
700 |
850 |
1000 |
1150 |
1300 |
|
Максимальное вдавливающее усилие, кН: |
|
|
|
|
|
|
|
|
|
для СВО-В-1 |
260 |
380 |
500 |
620 |
740 |
860 |
980 |
1100 |
|
для СВО-В-2 |
375 |
495 |
615 |
735 |
855 |
975 |
1095 |
1215 |
4.12. Время от начала включения вакуумного насоса до установления в вакуумной камере стабильного давления изменяется в зависимости от грунтовых условий, размеров анкера и производительности насоса от 1 до 7 мин и может быть предварительно определено по формуле (22).
Промежуточные значения степени разрежения и анкерующего эффекта рекомендуется определять экспериментально на каждой площадке строительства. Для этого выполняется пробное включение вакуумного анкера и через определенные интервалы времени (например, через 10-20 с) по вакуумметру фиксируется степень разрежения в вакуумной камере. По полученным данным строится график изменения во времени анкерующего усилия (рис. 5).
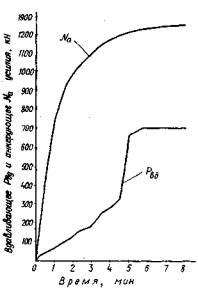
Рис. 5. График изменения анкерующего и вдавливающего усилий.
4.13. Время от начала включения вакуумного насоса до начала вдавливания сваи рекомендуется определять экспериментально при погружении первых 2-3 свай. Для этого после достижения в вакуумной камере анкера степени разрежения, обеспечивающей расчетные усилия вдавливания, включается в работу вдавливающий орган и через определенные интервалы времени (например, через 30 с) замеряются вдавливающие усилия. По этим данным на графике изменения анкерующего усилия строят кривую изменения вдавливающего усилия. Сопоставлением этих кривых находят момент времени, с которого анкерующее усилие больше вдавливающего. В этот момент можно начинать вдавливание сваи. В случае, рассмотренном на рис. 5, вдавливание можно начинать сразу же после включения вакуумного насоса.
4.14. Операция по вдавливанию сваи оборудованием СВО-В-1 или СВО-В-2 осуществляется следующим образом. По команде копровщика машинист включает главную лебедку крана, трос которой приводит в действие полиспаст вдавливающего органа. В процессе вдавливания копровщик наблюдает за ходом погружения сваи. При достижении сваей проектной отметки копровщик дает команду машинисту прекратить вдавливание и машинист отключает лебедку полиспаста.
4.15. Скорость вдавливания сваи может изменяться переключением режимов работы главной лебедки крана. При десятикратной запасовке блока полиспастов могут быть обеспечены следующие скорости вдавливания: 1,5; 2,0 и 2,5 м/мин.
Рекомендуется принимать максимальную скорость погружения сваи 2,5 м/мин, при сопротивлении грунтов вдавливанию сваи до 400 кН и уменьшить ее до 2,0 м/мин при увеличении вдавливающих усилий (от 400 до 600 кН). На последнем участке вдавливания сваи при приближении ее нижнего конца к проектной отметке и вдавливающем усилии более 600 кН необходимо погружать сваю с минимальной скоростью.
4.16. Усилие вдавливания в течение всего процесса погружения сваи контролируется с помощью тензодинамометра, установленного в наголовнике, или динамометра, установленного в глухой ветви полиспаста рабочего органа.
4.17. Усилие вдавливания в конце погружения сваи при минимальной скорости должно быть больше или равняться контрольному вдавливающему усилию, указанному в проекте.
4.18. Контрольные значения вдавливающего усилия Рвд рекомендуется предварительно принимать следующими: при прорезке сваями глинистых грунтов с консистенцией JL ³ 0,3 и опирании нижних концов также в глинистые грунты Рвд = Ррасч (расчетной несущей способности одной сваи, принятой в проекте); при прорезке сваями глинистых грунтов и заглублении нижних концов в пески Рвд = 1,1Ррасч; при прорезке сваями и заглублении нижних концов в пески Рвд = 1,2Ррасч.
Принятые контрольные значения вдавливающих усилий должны быть подтверждены в процессе производства работ погружением нескольких пробных рабочих свай (количество таких свай определяется в каждом конкретном случае проектировщиками в зависимости от изменения грунтовых условий в пределах площадки) с фиксацией вдавливающего усилия (составляется акт погружения пробной сваи по форме, приведенной в приложении 3) и с последующим испытанием этих пробных свай через 12-20 суток статической вдавливающей нагрузкой по ускоренной методике (РСН 339-86). Испытания свай статической нагрузкой, как правило, выполняются той же сваевдавливающей установкой, которой погружаются рабочие сваи.
4.19. Контролировать глубину погружения свай вдавливанием в зависимости от грунтовых условий можно по двум показателям: по заданной несущей способности сваи и по заданной отметке нижнего конца сваи.
Контроль по первому показателю применяется в тех случаях, когда ниже кровли несущего слоя грунта нет более слабых и более сильно сжимаемых грунтов, чем грунты несущего слоя. В этих условиях предварительно назначенная в проекте длина свай может изменяться (как в меньшую, так и в большую стороны) в процессе их вдавливания исходя из глубины погружения, обеспечивающей заданную несущую способность.
При контроле по второму показателю независимо от усилия вдавливания свая должна быть погружена до заданной отметки. Уменьшать длину свай в этих условиях не допускается, а увеличивать нецелесообразно.
4.20. В зависимости от сопротивления прорезаемых сваями грунтов погружать сваи вдавливающим оборудованием СВО-В-1 или СВО-В-2 можно как без дополнительных мероприятий, так и в комплексе с бурением лидерных скважин, с подмывом, с применением других способов уменьшения сопротивления грунтов погружению сваи.
4.21. Бурить лидерные скважины при вдавливании свай можно буровой головкой, навешиваемой на мачту сваевдавливающего оборудования, и автономным буровым механизмом.
4.22. Вертикальное положение сваи в процессе вдавливания контролируется по отвесу и в случае возможных отклонений регулируется изменением наклона копровой мачты за счет выдвижения штоков четырех гидроцилиндров (двух на вакуумном анкере и двух на опорных плитах).
4.23. Сведения о каждой свае, погружаемой вдавливанием, заносят в журнал по форме, приведенной в приложении 4.
5. ПРЕДВАРИТЕЛЬНОЕ ОПРЕДЕЛЕНИЕ ТЕХНОЛОГИЧЕСКИХ ПАРАМЕТРОВ СВАЕВДАВЛИВАЮЩЕГО ОБОРУДОВАНИЯ
Расчет технологических параметров вакуумного анкерного устройства
5.1. Вакуумный анкер представляет собой устройство для временного закрепления конструкций на поверхности грунта против отрывающих усилий.
Вакуумный анкер конструкции НИИСП Госстроя УССР (рис. 6) включает корпус 1 с заостренными снизу кромками, по периметру которого на расстоянии а от стенок корпуса размещены дополнительные стенки 2, жестко соединенные с корпусом обоймой 3. Внутри корпуса 1 с зазором помещена плита 4, герметично соединенная с корпусом рубашкой 5 из эластичного воздухонепроницаемого материала. В плите 4 имеется патрубок 6, соединяемый шлангом 7 с вакуумным насосом 8.
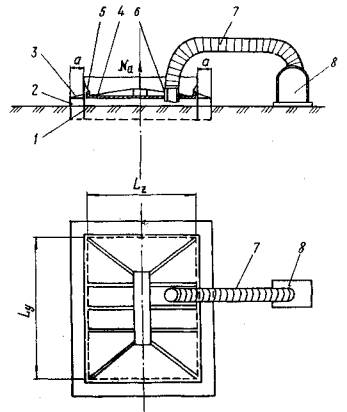
Рис. 6. Вакуумный анкер конструкции НИИСП Госстроя УССР
Анкер устанавливается на поверхность грунта и под действием собственного веса оборудования стенки его корпуса погружаются в грунт, образуя замкнутую полость (вакуумную камеру), ограниченную снизу поверхностью грунта, сверху - плитой, сбоку - стенками корпуса. При откачивании воздуха в вакуумной камере создается разрежение и на плиту начинает действовать создаваемое атмосферным давлением прижимающее усилие, под действием которого стенки корпуса дополнительно погружаются в грунт на некоторую глубину, уплотняя грунт и обеспечивая тем самым герметичность замкнутой полости. Дальнейшее откачивание воздуха приводит к стабилизации разрежения под плитой, после чего анкер готов к работе и может воспринять направленную вверх силу Nа. Устойчивое разрежение в вакуумной камере анкера поддерживается постоянно работающим насосом, откачивающим воздух, поступающий через грунт в вакуумный анкер.
К основным технологическим параметрам вакуумного анкера, оказывающим влияние на эффективность работы сваевдавливающего оборудования, относятся анкерующая способность - максимальное отрывающее усилие, которое может выдержать вакуумный анкер, требуемая производительность вакуумного насоса для поддержания разрежения на заданном уровне, продолжительность установления в вакуумной камере стабильного разрежения (с момента включения вакуумного насоса).
5.2. Приток воздуха в вакуумную камеру рассчитывается для определения требуемой производительности вакуумного насоса.
При заданных размерах вакуумного анкера приток воздуха зависит от требуемой степени разрежения в вакуумной камере, проницаемости грунтов, их пористости и влагонасыщенности, а также от глубины уровня грунтовых вод или другого воздухонепроницаемого экрана. Определенное влияние на приток воздуха в вакуумную камеру оказывает наличие вблизи работающего анкера скважин, траншей, откосов.
Эмпирические формулы для расчета притока воздуха в вакуумную камеру получены на основе обобщения экспериментально-теоретических исследований, численного моделирования фильтрации воздуха на ЭЦВМ и моделирования работы вакуумного анкера на АВМ.
Приведенные формулы справедливы при кратковременной работе анкера (до 1 ч), когда влагонасыщенность грунта условно можно считать неизменной в установившейся (стационарной) фазе фильтрации воздуха.
5.3. В сплошных однородных (по проницаемости воздуха) грунтах при отсутствии грунтовых вод, скважин, откосов или приямков приток воздуха в вакуумную камеру (м3/с),
![]() (2)
(2)
где Кг - коэффициент фазовой проницаемости воздуха, м2, определяемый по формуле (13); Lz - длина плиты вакуумного анкера, м (см. рис. 6); m - динамическая вязкость воздуха,
![]()
Рвак - давление в вакуумной камере, Па; Ратм = 1,02·105 Па - атмосферное давление; Qc - установившийся безразмерный фильтрационный поток,
![]() - безразмерная глубина погружения стенок анкера в грунт; h - глубина
погружения стенок анкера в грунт, м; Lу - ширина плиты вакуумного анкера, м;
- безразмерная глубина погружения стенок анкера в грунт; h - глубина
погружения стенок анкера в грунт, м; Lу - ширина плиты вакуумного анкера, м; ![]() - безразмерная
ширина обоймы анкера; а - ширина обоймы вакуумного анкера, м.
- безразмерная
ширина обоймы анкера; а - ширина обоймы вакуумного анкера, м.
5.4. В неоднородных по проницаемости воздуха грунтах, представленных двумя или тремя слоями, приток воздуха в вакуумную камеру анкера (м3/с),
WH = aW, (4)
где a - коэффициент, учитывающий неоднородность грунта,
для двухслойного основания
 (5)
(5)
для трехслойного основания
 (6)
(6)
где Кг1 и h1 - коэффициент фазовой проницаемости воздуха, м2, и мощность первого сверху слоя грунта, к; Кг2 и h2 - коэффициент фазовой проницаемости, м2, и мощность второго слоя грунта, м; h3 - мощность третьего сверху слоя грунта, м.
5.5. При наличии на глубине h1 от поверхности грунта грунтовых вод или другого воздухонепроницаемого экрана приток воздуха в вакуумную камеру определяется по формуле (4), в которой a определяется по формуле (5) путем подстановки в неё значений Кг2 = 10-16 м2 и h2 = 50 м.
5.6. При наличии рядом с работающим вакуумным анкером траншеи приток воздуха в вакуумную камеру
WТ = hТ·W, (7)
где коэффициент
![]() (8)
(8)
![]()
здесь l - расстояние от стенки вакуумного анкера до оси скважины или траншеи, м (рис. 7); Aг - коэффициент, учитывающий глубину скважин или траншей hТ, (определяется по табл. 2).

Рис. 7 Работа вакуумного анкера при наличии скважин и траншей
Таблица 2. Значения коэффициента Aг
|
|
Aг |
|
Aг |
|
Aг |
|
0,05 |
0,0599 |
0,80 |
0,7699 |
1,55 |
0,9629 |
|
0,10 |
0,1293 |
0,85 |
0,7969 |
1,60 |
0,9675 |
|
0,15 |
0,1877 |
0,90 |
0.Ы78 |
1,65 |
0,9704 |
|
0,20 |
0,2543 |
0,95 |
0,8397 |
1,70 |
0,9757 |
|
0,25 |
0,3095 |
1,00 |
0,8565 |
1,75 |
0,9780 |
|
0,30 |
0,3627 |
1,05 |
0,8717 |
1,80 |
0,9801 |
|
0,35 |
0,4219 |
1,10 |
0,8875 |
1,85 |
0,9820 |
|
0,40 |
0,4699 |
1,15 |
0,8996 |
1,90 |
0,9852 |
|
0,45 |
0,5227 |
1,20 |
0,9121 |
1,95 |
0,9866 |
|
0,50 |
0,5649 |
1,25 |
0,9217 |
2,00 |
0,9879 |
|
0,55 |
0,6044 |
1,30 |
0,9309 |
2,05 |
0,9891 |
|
0,60 |
0,6469 |
1,35 |
0,9391 |
2,10 |
0,9910 |
|
0,65 |
0,6805 |
1,40 |
0,9458 |
2,15 |
0,9919 |
|
0,70 |
0,7163 |
1,45 |
0,9522 |
2,20 |
0,9926 |
|
0,75 |
0,7443 |
1,50 |
0,9579 |
2,25 |
0,9940 |
|
|
|||||
При наличии скважины
Wскв = hскв·W, (9)
где коэффициент
![]() (10)
(10)
5.7. При работе вакуумного анкера рядом с откосом приток воздуха в вакуумную камеру
![]() (11)
(11)
где
![]() (12)
(12)
![]()
hотк - высота откоса, м (рис. 8) ;
![]()
s - расстояние от стенки анкера до бровки откоса, м (рис. 8).
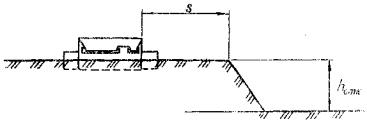
Рис. 8. Работа вакуумного анкера рядом с откосом
5.8. Коэффициент фазовой проницаемости воздуха определяется по формуле
где fг(G) - относительная фазовая проницаемость воздуха, зависящая от степени влажности грунта G:
при G ³ 0,9
fг(G) = 0; (14)
при 0 < G £ 0,9
 (15)
(15)
![]() (16)
(16)
W - весовая влажность грунта, доли единицы; gs, gw - удельный вес соответственно грунта и воды, Н/м3; e - коэффициент пористости грунта; K - проницаемость грунта, м2.
В первом приближении значения К могут быть приняты по табл. 3
Таблица 3. Значения проницаемости грунтов
|
Характеристика грунтов |
Проницаемость К |
|
|
м2 |
дарси |
|
|
Хорошо проницаемые галечники и гравий, крупный песок |
102·10-12 10,2·10-12 |
100 10 |
|
Среднезернистые и мелкозернистые пески |
10,2·10-12 1,02·10-12 |
10 1 |
|
Пылеватые пески, глинистые, супеси |
1,02·10-12 0,102·10-12 |
1 0,1 |
|
Суглинки, глины |
0,102·10-12 1,02·10-15 |
0,1 0,001 |
Более точно проницаемость грунта определяется по формуле
![]() (17)
(17)
где m - динамическая вязкость воды, m = 10-3 кг/(м.с); r - плотность воды, r = 1000 кг/м3; g - ускорение свободного падения, g = 9,81 м/с2; С - коэффициент фильтрации воды через грунт, м/с.
5.9. Подбор требуемого вакуумного насоса производится по его производительности и паспортной характеристике, устанавливающей зависимость производительности вакуумного насоса sН от давления в вакуумной камере Pвак из условия
sН(Pвак) ³ W (18)
В диапазоне давлений, в котором работает вакуумный анкер (10-1 кПа £ Pвак < 102 кПа), производительность всех насосов постоянна и равна его паспортному значению sН (рис. 9). Поэтому в условии (18) следует принимать sН(Pвак) = sН.
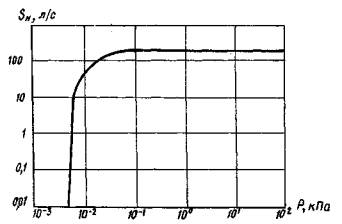
Рис. 9. Диаграмма зависимости быстроты действия sН от входного давления Р в агрегатах типа НВЗ и АВЗ (диаграмма построена в логарифмической шкале)
В табл. 4 приведены технические характеристики вакуумных насосов, выпускаемых отечественной промышленностью и рекомендуемых для применения в сваевдавливающем оборудовании с вакуумным анкером.
Таблица 4. Технические характеристики вакуумных насосов
|
Наименование показателей |
Марка насоса |
||||
|
АВЗ-63Д |
АВЗ-90 |
АВЗ-125Д |
АВЗ-180 |
НВЗ-300 |
|
|
Быстрота действия в диапазоне давлений от атмосферного до 0,26 кПа, л/с |
63 |
90 |
125 |
180 |
300 |
|
Мощность электродвигателя, кВт |
6,0 |
8,5 |
10,0 |
12,0 |
40 |
|
Количество масла на одну заправку, л |
10 |
14 |
20 |
28 |
50 |
Примечание. Для насосов всех марок предельная температура масла составляет 80°С, частота вращения вала - 520±20 об./мин; в качестве рабочей жидкости используют вакуумное масло ВМ-1, ВМ-4 и ВМ-6.
15.10. Анкерующая способность вакуумного устройства рассчитывается следующим образом. Возможное прижимающее усилие, создаваемое вакуумным анкерным устройством (анкерующая способность), зависит от размеров устройства, фильтрационных характеристик грунтов и производительности вакуумного насоса:
![]() (19)
(19)
где Рвак - давление в вакуумной камере при установившемся (стационарном) режиме фильтрации; Lу, Lz - размеры плиты вакуумного анкерного устройства, м; Gа - вес вакуумного анкерного устройства, кН.
Установившееся давление в вакуумной камере Рвак определяют в следующей последовательности.
По формуле (3) находят безразмерный параметр Qс, характеризующий приток воздуха в вакуумную камеру.
Глубина погружения стенок анкера в грунт h, м, соответствует следующим данным (определяется экспериментально):
|
Глины и суглинки полутвердой и тугопластичной консистенции, твердые супеси |
0,15-0,20 |
|
Глины и суглинки мягкопластичной консистенции |
0,20-0,30 |
|
Глины и суглинки текучепластичной консистенции, текучие супеси |
0,45 |
Значение безразмерного параметра
![]() (20)
(20)
По номограмме, приведенной на рис. 10,
определяется значение безразмерного показателя давления ![]() , соответствующее найденным значениям Qс и В.
, соответствующее найденным значениям Qс и В.

Рис. 10. Номограмма зависимости безразмерного параметра В от
![]() при различных Qс
при различных Qс
Определяется давление в вакуумной камере, соответствующее установившемуся (стационарному) режиму фильтрации, Па:
![]() (21)
(21)
Продолжительность установления в вакуумной камере максимального разрежения, с, зависит от фильтрационных свойств грунтов, производительности насоса и размеров анкерного устройства:
Определение параметров процесса вдавливания свай
5.11. Основные параметры процесса вдавливания (усилие и скорость вдавливания, глубина погружения сваи) назначаются исходя из следующего условия, обеспечивающего погружение сваи.
где Рств - допускаемое сжимающее усилие на голову сваи, определяемое из условия прочности материала ствола сваи, кН; Рвд - максимальное вдавливающее усилие, которое может быть создано в данных условиях вдавливающим оборудованием, кН; Ргр -максимальное сопротивление грунта погружению сваи, кН.
5.12. Рств определяется в соответствии с требованиями СНиП 2.03.01-84.
Значение Рвд определяется по табл. 1 исходя из достигаемого разрежения в вакуумной камере Рвак, определяемого по методике, изложенной в пп. 5.1.-5.14.
Значение Ргр определяется физико-механическими характеристиками грунтов основания, поперечными размерами и глубиной погружения сваи. Определенное влияние на усилие вдавливания могут оказывать также скорость погружения сваи и угол заострения нижнего конца.
Учитывая сложный характер зависимости сопротивления грунтов вдавливанию Ргр, его значение в конкретных грунтовых условиях достаточно достоверно может быть определено путем погружения пробных свай.
5.13. Предварительно на стадии проектирования сопротивление грунтов вдавливанию сваи определяется по формуле
Ргр = gR·R·A + uSgf fi hi, (24)
где gR, gf - коэффициенты, учитывающие изменение сопротивления грунтов под подошвой и по боковой поверхности сваи при ее вдавливании (определяются по табл. 5); R - расчетное сопротивление грунта под нижним концом сваи, принимаемое по СНиП 2.02.03-85; А - площадь поперечного сечения сваи, м2; u - периметр сваи; fi - расчетное сопротивление i-го слоя грунта основания на боковой поверхности сваи, принимаемое по СНиП 2.02.03-85 кПа; hi - толщина i-го слоя грунта, соприкасающегося с боковой поверхностью сваи, м.
Таблица 5. Значения коэффициентов gR и gf
|
Характеристика грунтов |
gR |
gf |
|
Пылевато-глинистые грунты при показателе текучести: |
|
|
|
JL ³ 0,3 |
0,6 |
0,6 |
|
0 < JL < 0,3 |
0,85 |
0,80 |
|
JL > 0 |
1,0 |
1,0 |
|
Песчаные грунты средней плотности и плотные |
1.5 |
1,5 |
5.14. Если условие (23) не удовлетворяется из-за большого сопротивления грунтов, то вдавливание свай следует выполнять с применением лидерных скважин или подмыва.
Определение длительности цикла погружения свай сваевдавливающим оборудованием с вакуумным анкером
5.15. Продолжительность полного цикла погружения одной сваи сваевдавливающим оборудованием с вакуумным анкером, мин, зависит от длины погружаемых свай, расстояния, на которое подтаскивают сваю, схемы размещения свай в плане и прочности грунтов основания:
tц = t1 + t2 + t3 + t4 + t5 + t6, (25)
где t1 - время перемещения сваевдавливающего агрегата с наводкой рабочего органа на точку погружения сваи; t2 - время подтаскивания и подъема сваи с заводкой ее головы в наголовник; t3 - продолжительность установки сваи на точку погружения; t4 - продолжительность опускания опорных плит и анкера, выравнивания рамы, включения в работу вакуумного анкера; t5 - продолжительность вдавливания сваи; t6 - время подъема анкера и опорных плит.
5.16. Время t1, затрачиваемое на перемещение агрегата от одной точки погружения свай к другой, определяется схемой размещения свай в плане, расстояниями, между сваями, принятой схемой движения сваевдавливающего агрегата, средней скоростью перемещения агрегата.
При рядовом расположении свай или при сплошном свайном поле и перемещении сваевдавливающего агрегата по металлическим сланям
![]() (26)
(26)
где Lсв - расстояние между соседними сваями, м; Vсp - среднее значение скорости перемещения сваевдавливающего агрегата с учетом перекладки cланей, поворотов и других вспомогательных операций, м/мин; tH - продолжительность выполнения операции наведения рабочего органа на точку погружения, мин.
Значения Vсp и tH для различных схем движения сваевдавливающего оборудования по металлическим cланям при разных характеристиках расположения свай в плане получены на основании отработки технологических операций на оборудовании СВО-В-1 в производственных условиях (табл. 6).
Таблица 6. Скорость перемещения сваевдавливающего агрегата Vсp и продолжительность выполнения операций наведения рабочего органа на точку погружения tH
|
Характеристика расположения свай в плане |
Движение сваевдавливающего агрегата |
Vсp, м/мин |
tH, мин |
|
Рядовое расположение свай |
"На себя" (рис. 11) |
0,33 |
0,5 |
|
Вдоль ряда сбоку (рис. 12) |
1,43 |
0,5 |
|
|
Сплошное свайное поле |
При погружении свай по радиусу действия крана - "на себя" (рис. 13) |
0,67 |
1,0 |
|
Вдоль рядов сбоку челночным способом (рис. 14) |
1,43 |
0,5 |
|
|
Кустовое расположение свай |
При покустовом погружении по радиусу действия - на себя" (рис. 15) |
0,67 |
1,0 |
|
При погружении свай рядами - сбоку челночным способом (рис. 16) |
1,43 |
0,5 |
|
|
При покустовом погружении - вдоль оси куста сбоку (рис. 17) |
1,43 |
0,5 |
5.17. Время, затрачиваемое на подтаскивание и подъем сваи с заводкой ее головы в наголовник,
![]() (27)
(27)
где L - расстояние, на которое подтаскивается свая, м; lсв - длина погружаемой сваи, м; Vкр - скорость подъема крюка для подтаскивания и подъема сваи, м/мин; V0 - скорость подъема рабочего органа сваевдавливающего оборудования, м/мин.
При Vкр = 12 м/мин, V0 = 6 м/мин для оборудования СВО-В-1
![]() (28)
(28)
5.18. Продолжительность вдавливания сваи
![]() (29)
(29)
где Vвд - скорость вдавливания сваи, принимаемая для СВО-В-1 и СВО-В-2 равной: 2,5 м/мин - при погружении свай в глинистые грунты с показателем текучести JL ³ 0,3, или через лидерные скважины, или с подмывом; 2,0 м/мин - при погружении свай в глинистые грунты с показателем текучести 0 < JL < 0,3, пылеватые и глинистые пески средней плотности; 1,5 м - при погружении в пески крупные и средней крупности средней плотности, глинистые грунты с показателем текучести JL £ 0.
5.19. Продолжительность выполнения технологических операций (установки сваи на точку погружения t3, опускания опорных плит и анкера, выравнивание рамы и включения в работу вакуумного анкера t4, подъема анкера и опорных плит t6), не зависящих от размеров свай, схем перемещения агрегата и других факторов, принимается по данным хронометража выполнения этих операций; t3 = 2 мин, t4 = 2,3 мин, t6 = 1,7 мин.
6. ТРЕБОВАНИЯ ПО ТЕХНИКЕ БЕЗОПАСНОСТИ
6.1. К управлению агрегатом с навесным сваевдавливающим оборудованием допускаются специально обученные машинисты.
6.2. Перед началом работы машинист обязан убедиться в надежном креплении сборочных единиц и деталей оборудования, после чего проверить исправность механизмов на холостом ходу.
6.3. При работе агрегат должен стоять на ровном месте. Допустимый наклон оборудования - 0,087 рад (5°).
6.4. При производстве работ все операции должны выполняться плавно, не допускается резкое включение механизмов.
6.5. Проезд установки под проводами высоковольтных линий электропередачи разрешается в том случае, если расстояние между проводами и верхней точкой установки не менее 2,0 м, а напряжение линии - не более 380 В.
6.6. На установке должна быть аптечка с необходимыми медикаментами.
6.7. Категорически запрещается включать механизмы и начинать работу без подачи предварительного звукового сигнала, не убедившись в отсутствии людей на установке и в радиусе ее действия; смазывать, осматривать, регулировать и ремонтировать при работающем двигателе экскаватора; работать при нарушенной технической характеристике оборудования.
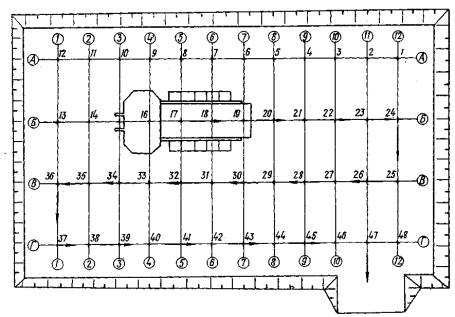
Рис. 11. Схема устройства рядов свай при движении "на себя"
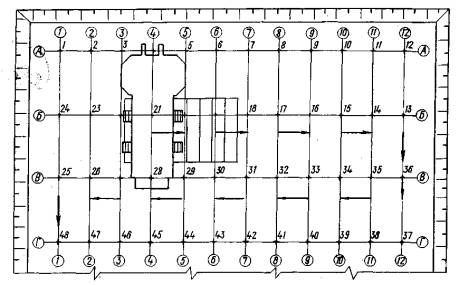
Рис. 12. Схема устройства радов свай при
движении вдоль ряда сбоку:
1-48 - номера свай

Рис. 13. Схема устройства свайного поля при
погружении свай по радиусу действия крана с движением на себя:
1-44 - номера свай
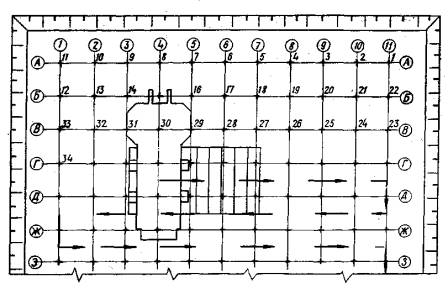
Рис. 14. Схема устройства свайного поля при
движении вдоль рядов сбоку челночным способом:
1-34 - номера свай
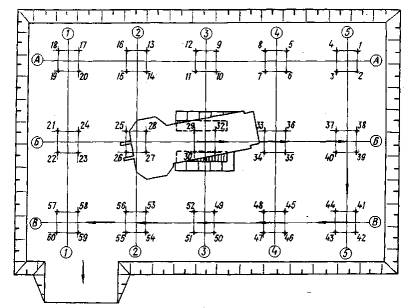
Рис. 15. Схема работы сваевдавливающего оборудования при
покустовом погружении по радиусу действия с движением "на себя":
1-60 - номера свай
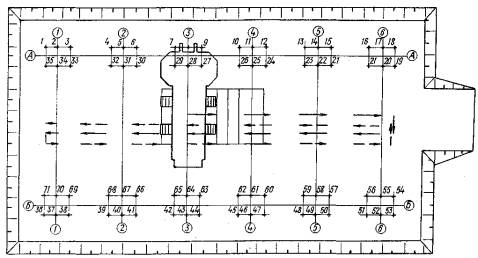
Рис. 16. Схема устройства
кустов свай при погружении свай рядами с движением сбоку челночным способом:
1-71 - номера свай

Рис. 17. Схема работы сваевдавливающего
оборудования при покустовом погружении с движением вдоль оси куста сбоку:
1-40 - номера свай
ПРИЛОЖЕНИЕ 1
ТЕХНОЛОГИЧЕСКАЯ КАРТА НА ПОГРУЖЕНИЕ ЗАБИВНЫХ ЖЕЛЕЗОБЕТОННЫХ СВАЙ СВАЕВДАВЛИВАЮЩИМ ОБОРУДОВАНИЕМ С ВАКУУМНЫМ АНКЕРОМ
1. Требования к выполнению подготовительных работ
До начала погружения свай должны быть выполнены следующие работы: закончена отрывка котлована с учетом отводов поверхностных вод с соблюдением уклона от 0,5 до 1%; котлован передан исполнителю с составлением соответствующего акта; выполнены временные подъездные пути для сваевдавливающей установки и автотранспорта; подведена силовая линия электроэнергии: установлена временная осветительная линия при работе в две или три смены; завезены и складированы сборные железобетонные сваи в количестве, обеспечивающем двухдневную бесперебойную работу; вынесены и закреплены на местности и переданы по акту разбивочные оси здания (за основные линии разбивки должна приниматься ось сооружения; к акту прилагаются схемы расположения знаков разбивки, данные о привязке к базисной линии; разбивка местоположения свай по главным осям должна быть выполнена полностью на все здание до начала погружения свай); доставлены в зону действия сваевдавливающей установки инструменты и инвентарь; установлены инвентарные бытовые помещения; проверено соответствие маркировки на сваях заводским паспортам; произведена разметка свай по длине (рис. 18).

Рис. 18
2. Указания по продолжительности хранения и запасу конструкций и изделий
Транспортирование, разгрузку и раскладку свай в зоне складирования следует производить с соблюдением мер, предупреждающих перенапряжение материала и повреждение свай. Сваи, находящиеся в горизонтальном положении, можно поднимать только при вертикальном положении грузового полиспаста, при складировании и раскладке сваи следует укладывать на деревянные прокладки шириной не менее 150 мм, расположенные непосредственно у подъемных петель. При многоярусном складировании свай прокладки укладывают строго по вертикали. Головы свай направляют в одну сторону.
3. Указания по осуществлению контроля и оценке качества работ, включающие допуски в соответствии с требованиями строительных норм
Подъем и установку свай на точку погружения производят сваевдавливающей установкой при помощи кольцевого и страховочного стропов.
Погружение свай до проектной отметки выполняется при строгом соблюдении следующих требований.
Каждую сваю следует устанавливать точно на месте погружения; при погружении свая и направляющая мачта должны находиться в вертикальном положении; при отклонении сваи или направляющей мачты от вертикального положения в процессе задавливания погружение сваи следует приостановить для ликвидации наклона (вертикальность выверяют копровщики с помощью отвеса в двух взаимно перпендикулярных направлениях); следует постоянно следить за передвижением наголовника вдоль направляющих копровой мачты.
Усилие вдавливания определяют с помощью тензонаголовника конструкции НИИСП и динамометра, запасованного в глухую ветвь полиспаста.
Сваю вдавливают до отметки, где усилие вдавливания равно 1,25 расчетной несущей способности (по показаниям КСТЗ-Н или динамометра).
Допустимые отклонения свай в плане.
При однорядном расположении:
поперек оси свайного ряда................0,2a
вдоль оси свайного ряда...........….....0,3a
Для кустов и лент с расположением свай в два и три ряда:
для крайней сваи....................………....0,2a
для свайного ряда поперек оси............ 0,3a
При сплошном свайном поле под всем зданием:
для крайних свай......................... 0,2a
для средних свай....................…...0,4
Для одиночных свай..........................5 см
Для свай-колонн........................….....3 см
Число свай, имеющих отклонения от проектного положения, не должно превышать 25% общего числа свай в основании.
Отклонение разбивочных осей свайных рядов от проектных не должно превышать 1 см на каждые 100 м ряда.
4. Требования по охране труда и технике безопасности
При производстве работ следует руководствоваться требованиями СНиП III-4-80 и Инструкции по технологии погружения свай вдавливанием, разработанной НИИСП Госстроя УССР.
К работе на оборудовании могут быть допущены лица, сдавшие технический минимум, изучившие правила техники безопасности общестроительных работ, инструкцию по эксплуатации сваевдавливающего оборудования и имеющие удостоверения такелажника-стропальщика.
Проверка знаний техники безопасности фиксируется в соответствующих документах установленной формы.
До начала работ бригадир обязан проверить рабочее место бригады, осмотреть установку, убедиться в надежности крепления сборочных единиц, проверить состояние лебедок, тормозов, автоматического управления, вспомогательного оборудования и инструментов.
В случае обнаружения неисправности работа должна быть немедленно прекращена.
При работе установки не допускается уклон поверхности более 0,087 рад (5°).
Все операции должны выполняться плавно, не допускается резкое включение механизмов.
Проезд установки под проводами высоковольтной линии электропередачи разрешается при расстоянии между проводами и верхней точкой установки не менее 2 м и напряжении линии не более 360 В.
Категорически запрещается включать механизмы и начинать работы без подачи предварительного звукового сигнала, не убедившись в отсутствии на установке и в радиусе ее действия посторонних лиц и обслуживающего персонала; производить смазку, осмотр, регулировку и ремонт механизмов при работающем двигателе установки; производить работы с нарушением параметров технической характеристики базовой машины и установки в целом; поднимать сваи с неизвестным весом, а также отрывать сваи, примерзшие к грунту; подниматься на стрелу копра без монтажного пояса; направлять канат руками при подъеме сваи; подтаскивать сваи к копру, не используя предназначенный для этой цели отводной блок; работать с поврежденным канатом; оставлять сваи на весу; выравнивать погруженную сваю механизмами копра; работать в темное время суток без освещения площадки.
Монтаж и демонтаж навесного оборудования осуществляются под непосредственным наблюдением инженерно-технического работника.
Канат, применяемый для подъема сваи, должен быть ровным, без узлов и перекрутки. Под ребра сваи должны быть положены прокладки для предохранения каната от резких перегибов и перетирания. При установке сваю следует стропить только в фиксированных точках (за петли или скобы). Обслуживающий персонал агрегата обязан работать в защитных касках.
Операции по погружению свай выполняются под руководством представителя НИИСП.
По окончании работ на стройплощадке следует остановить и обесточить все механизмы и машины, привести в порядок рабочее место, произвести необходимые отметки в сменном журнале о работе копра.
5. Состав бригады
|
Профессия |
Разряд |
Количество |
|
Машинист установки |
VI |
1 |
|
Копровщик |
V |
1 |
|
Копровщик |
IV |
1 |
|
Машинист автокрана |
V |
1 |
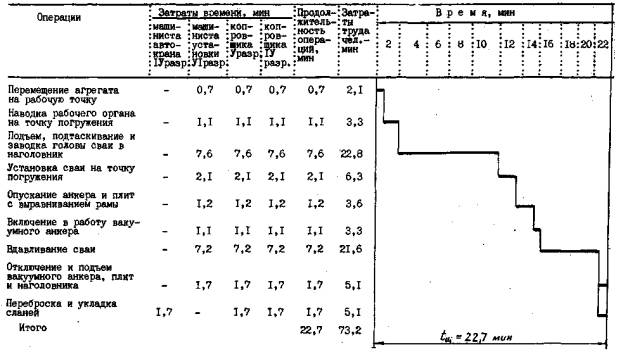
6. График трудового процесса вдавливания свай длиной 14 м сечением 0,35×0,35 м сваевдавливающей установкой
7. График выполнения работ (форма)
|
Вид работ |
Единица измерения |
Объем работ |
Трудоемкость на единицу измерения, чел,-смены |
Трудоемкость на весь объем работ, чел.-смены |
Состав бригады |
Рабочие дни |
|||||
|
5 |
10 |
15 |
20 |
25 |
30 |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
8. Калькуляция трудовых затрат
|
Обоснование |
Вид работ |
Единица измерения |
Объем работ |
Норма времени на единицу измерения, чел.-ч |
Затраты труда на весь объем работ, чел.-смены |
Расценка на единицу измерения, р.-к. |
Стоимость затрат труда на весь объем работ, р.-к. |
|
СНиП IV-5-82, СНиП IV-3-82 |
Погружение свай вдавливанием с помощью установки СВO-В-1 |
м3 |
1000 |
0,933 |
112 |
21-50 |
21500-00 |
9. Пример составления единичной расценки на погружение свай вдавливанием навесным оборудованием с вакуумным анкером*
* В ценах 1984 г.
|
Обоснование стоимости |
Вид работ, затрат, используемое оборудование |
Единица измерения |
Количество единиц |
Стоимость работ, руб. |
Общая стоимость работ, руб. |
|
Зарплата рабочих, руб. |
Зарплата рабочих, руб. |
||||
|
СНиП IV-5-82 ЕРЕР 5-18 |
Погружение свай (за исключением стоимости эксплуатации; |
м3 |
1 |
19,4 3,84 |
19,40 3,84 |
|
СНиП IV-3-82 |
Кран-трубоукладчик |
машино-ч |
0,23 |
7,06 1,43 |
1,62 0,33 |
|
СНиП IV-3-82 |
Вибропогружатели низкочастотные |
То же |
1,04 |
3,02 0,95 |
3,14 0,99 |
|
СНиП IV-3-82 |
Лебедка электрореверсная |
-"- |
0,48 |
0,92 0,61 |
0,44 0,37 |
|
СНиП IV-3-82 |
Подъемник гидравлический |
-"- |
0,39 |
2.84 0,85 |
1,12 0,22 |
|
СНиП IV-3-82 |
Компрессор с электродвигателем |
-"- |
0,6 |
0,17 0,04 |
0,1 0,02 |
|
СНиП IV-3-82 |
Насос стационарный с электроприводом |
-"- |
0,3 |
0,55 0,27 |
0,17 0,08 |
|
СНиП IV-3-82 |
Вакуумная установка |
-"- |
0,5 |
1,08 0,26 |
0,54 0,13 |
|
Тарифно-квалификационный справочник (тариф электрика IV разр.) |
Обслуживание электрооборудования |
руб. |
2,1 |
0,79 |
1,66 1,66 |
|
изготавливается в мастерских |
Металлические слани |
м3 |
1 |
0,87 0,22 |
0,87 0,22 |
|
Тарифно-квалификационный справочник |
Обвалование анкера |
м3 |
0,25 |
0,46 0,46 |
0,12 0,12 |
|
Рекомендации ЦНИИОМТП Госстроя СССР |
Отчисления на амортизацию |
машино-ч |
8,2 |
1,84 1 |
1,84 1 |
|
|
Итого: |
руб. |
|
|
21,50 |
|
|
Из них: |
|
|
|
|
|
|
Основная зарплата рабочих |
|
|
|
5,84 |
|
|
эксплуатация машин |
|
|
|
15,01 |
|
|
в том числе зарплата обслуживающих рабочих |
|
|
|
4,85 |
|
|
материальные ресурсы |
|
|
|
0,65 |
ПРИЛОЖЕНИЕ 2
КАРТА ТРУДОВЫХ ПРОЦЕССОВ НА ПОГРУЖЕНИЕ ЖЕЛЕЗОБЕТОННЫХ СВАЙ ОБОРУДОВАНИЕМ С ВАКУУМНЫМ АНКЕРОМ
1. Сравнительные показатели производительности установки СВО-В-1 и сваебойного агрегата при погружении свай длиной 14 м
|
Наименование показателей |
СВО-В-1 |
Сваебойный агрегат |
|
Выработка на одну чел.-смену, шт. |
5 |
2,4 |
|
Затраты труда при погружении одной сваи, чел.-ч |
1,6 |
2,61 |
|
Количество погружаемых свай в смену, шт. |
20 |
7,2 |
|
Количество рабочих, чел. |
4 |
3 |
|
Время цикла погружения, мин |
22,7 |
60,8 |
2. Указания по производству работ
Погружение свай производится сваевдавливающей установкой СВО-В-1 на базе крана РДК-25 или МКГ-25 (рис. 19).
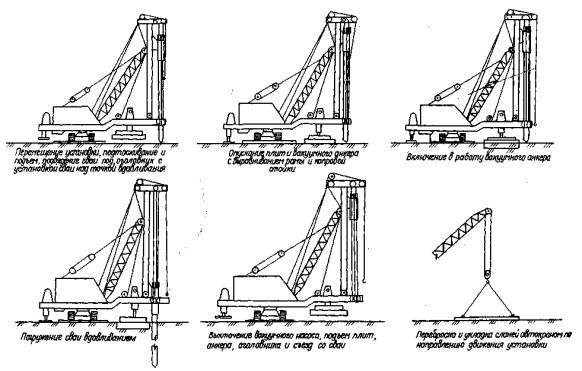
Рис. 19
Работы следует выполнять в такой последовательности: Установку перемещают на точку вдавливания (при поднятых в верхнее положение вакуумном анкере и опорных плитах). Оголовник (рабочий орган) наводят на точку погружения (за счет передвижения крана вперед-назад и поворота платформы крана). Сваю стропят, подтаскивают, поднимают и заводят в наголовник с последующей установкой на точку погружения. Вакуумный анкер и задние опорные плиты опускают на поверхность грунта, выравнивают раму и устанавливают в вертикальное положение копровую стойку с помощью четырех гидроцилиндров, подъема вакуумного анкера и опорных плит; включают в работу вакуумный анкер; погружают сваю (первые 0,5 м с малой скоростью, постепенно увеличивая ее до максимальной. При достижении проектной отметки или контрольного усилия вдавливания погружение сваи можно считать законченным). Вакуумный насос выключают, поднимают вакуумный анкер, задние плиты и наголовник.
3. Перечень основного оборудования, приспособлений, инвентаря и инструментов
|
Наименование |
ГОСТ, № чертежа |
Количество, шт. |
|
Навесное сваевдавливающее оборудование СВО-В-1 |
Конструкции НИИСП Госстроя УССР |
1 |
|
Упорная рама |
611.00.00.000 |
1 |
|
Вакуумный анкер |
611.00.00.000 |
1 |
|
Наголовник с полиспастной системой |
611.00.00.000 |
1 |
|
Гидроцилиндр подъема вакуумного анкера |
611.00.00.000 |
2 |
|
Опорная балка |
611.00.00.000 |
1 |
|
Гидроцилиндр задней балки |
611.00.00.000 |
2 |
|
Навесная гидравлическая станций |
579.00.00.000 |
1 |
|
Вакуумный насос АВЗ-180 |
- |
1 |
|
Копровая стойка |
611.00.00.000 |
1 |
|
Дополнительная лебедка |
- |
1 |
|
Кран РДК-25 |
- |
1 |
|
Динамометр ДПУ-10-2 |
ГОСТ 9406-60 |
1 |
|
Набор манометров |
- |
4 |
|
Набор вакуумметров |
- |
3 |
|
Набор ключей |
- |
1 |
|
Строительный лом |
ГОСТ 1405-72 |
1 |
|
Отвес |
ГОСТ 7948-71 |
2 |
|
Кувалда |
ГОСТ 11402-65 |
1 |
|
Прогибомер |
- |
2 |
ПРИЛОЖЕНИЕ 3
АКТ
НА ПОГРУЖЕНИЕ ПРОБНОЙ СВАИ ПС-1
СВАЕВДАВЛИВАЮЩИМ ОБОРУДОВАНИЕМ С ВАКУУМНЫМ АНКЕРОМ
|
г. "___" __________19 г. Мы, нижеподписавшиеся, представитель заказчика _________________________________ ________________________________________________________________, представитель (наименование организации, Ф.И.О. представителя) проектной организации_________________________________________________________ (наименование организации, Ф.И.О. _______________, начальник участка _____________________________________________ представителя) _____________________________________________________________________________ (наименование организации, выполняющей работы по погружению свай, _______________________________________________________ составили настоящий акт Ф.И.О. начальника участка) о том, что на площадке строительства _____________________________________________ ________________________________________________________произведено погружение (наименование объекта строительства) пробной сваи ПС-1 длиной____________________ м, сечением______________________ м навесным сваевдавливающим оборудованием с вакуумным анкером. Свая ПС-1 погружена на глубину _______________________________м в лидирующую скважину Æ____________________м глубиной _________________м. Усилие вдавливания в конце погружения составило ____________ кН. Процесс вдавливания до глубины ________м осуществлялся непрерывно. ____________________ _____________________ /подпись/ /подпись/
|
ПРИЛОЖЕНИЕ 4
ЖУРНАЛ ПОГРУЖЕНИЯ РАБОЧИХ СВАЙ (ФОРМА)
|
Местоположение сваи (по осям) |
Абсолютная отметка, м |
Глубина в грунте, м |
Усилия вдавливания, кН |
Сечение сваи, м |
Отклонения, см |
||
|
головы |
острия |
по вертикали |
в плане |
||||
|
|
|
|
|
|
|
|
|