|
ФЕДЕРАЛЬНОЕ АГЕНТСТВО |
||
|
|
НАЦИОНАЛЬНЫЙ |
ГОСТ Р |

Глобальная навигационная спутниковая система
МЕТОДЫ И ТЕХНОЛОГИИ ВЫПОЛНЕНИЯ ГЕОДЕЗИЧЕСКИХ
И ЗЕМЛЕУСТРОИТЕЛЬНЫХ РАБОТ
Определение относительных координат
по измерениям псевдодальностей
Основные положения
|
|
Москва Стандартинформ 2010 |
Предисловие
Цели и принципы стандартизации в Российской Федерации установлены Федеральным законом от 27 декабря 2002 г. № 184-ФЗ «О техническом регулировании», а правила применения национальных стандартов Российской Федерации - ГОСТ Р 1.0-2004 «Стандартизация в Российской Федерации. Основные положения»
Сведения о стандарте
1 РАЗРАБОТАН 29-м Научно-исследовательским институтом Министерства обороны Российской Федерации
2 ВНЕСЕН Техническим комитетом по стандартизации ТК 363 «Радионавигация»
3 УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Приказом Федерального агентства по техническому регулированию и метрологии от 15 декабря 2009 г. № 932-ст
4 ВВЕДЕН ВПЕРВЫЕ
Информация об изменениях к настоящему стандарту публикуется в ежегодно издаваемом информационном указателе «Национальные стандарты», а текст изменений и поправок - в ежемесячно издаваемых информационных указателях «Национальные стандарты». В случае пересмотра (замены) или отмены настоящего стандарта соответствующее уведомление будет - опубликовано в ежемесячно издаваемом информационном указателе «Национальные стандарты». Соответствующая информация, уведомление и тексты размещаются также в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет
Содержание
НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
|
Глобальная навигационная спутниковая система МЕТОДЫ И ТЕХНОЛОГИИ ВЫПОЛНЕНИЯ ГЕОДЕЗИЧЕСКИХ И ЗЕМЛЕУСТРОИТЕЛЬНЫХ РАБОТ Определение относительных координат по измерениям псевдодальностей Основные положения Global navigation satellite system. Methods and tecnologies of geodetic and cadastral works execution. Determination of relative coordinates by pseudo-range measurements. Basic principles |
Дата введения - 2011-01-01
1 Область применения
Настоящий стандарт распространяется на методы и технологии выполнения геодезических и землеустроительных работ с использованием аппаратуры потребителей глобальной навигационной спутниковой системы.
Настоящий стандарт устанавливает методы определения относительных координат заданного пункта по измерениям псевдодальностей навигационного космического аппарата глобальных навигационных спутниковых систем.
2 Нормативные ссылки
В настоящем стандарте использованы ссылки на следующие стандарты:
ГОСТ Р 52457-2005 Глобальная навигационная спутниковая система. Аппаратура потребителей. Классификация
ГОСТ Р 52928-2008 Система спутниковая навигационная глобальная. Термины и определения
ГОСТ 22268-76 Геодезия. Термины и определения
Примечание - При пользовании настоящим стандартом целесообразно проверить действие ссылочных стандартов в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет или по ежегодно издаваемому информационному указателю «Национальные стандарты», который опубликован по состоянию на 1 января текущего года, и по соответствующим ежемесячно издаваемым информационным указателям, опубликованным в текущем году. Если ссылочный стандарт заменен (изменен), то при пользовании настоящим стандартом следует руководствоваться заменяющим (измененным) стандартом. Если ссылочный стандарт отменен без замены, то положение, в котором дана ссылка на него, применяется в части, не затрагивающей эту ссылку.
3 Термины и определения
В настоящем стандарте применены термины по ГОСТ 22268, ГОСТ Р 52457, ГОСТ Р 52928 и следующие термины с соответствующими определениями:
3.1 геодезические работы: Комплекс технологических процессов, осуществляемых для определения параметров фигуры и гравитационного поля Земли, координат точек земной поверхности и их изменений во времени.
3.2 землеустроительные работы: Комплекс технологических процессов, осуществляемых для установления, восстановления и закрепления на местности границ земельных участков, определения и оформления их местоположения и площади.
3.3 псевдодальность кодовая: Произведение скорости распространения сигнала в вакууме на разность между временем приема сигнала по шкале времени аппаратуры потребителя и временем передачи этого сигнала с НКА по бортовой шкале времени.
3.4 псевдодальность фазовая: Произведение длины волны несущей частоты на разность фазы сигнала, созданного в приемнике в момент приема сигнала по шкале времени аппаратуры потребителя, и фазой сигнала, созданного на НКА по бортовой шкале времени.
3.5 координаты пункта: Прямоугольные координаты X, Y, Z пункта в общеземной геоцентрической системе координат.
3.6 локальная дифференциальная подсистема ГНСС: Дифференциальная подсистема ГНСС, в которой дифференциальные поправки используют в пределах от 50 до 200 км от контрольно-корректирующей станции дифференциальной подсистемы ГНСС (опорной станции).
3.7 относительные координаты пункта: Координаты определяемого пункта наблюдения относительно опорного пункта с известными координатами.
3.8 региональная дифференциальная подсистема ГНСС: Дифференциальная подсистема, в которой дифференциальные поправки используют в пределах от 400 до 2000 км от контрольно-корректирующей станции дифференциальной подсистемы ГНСС (опорной станции).
3.9 широкозонная дифференциальная подсистема ГНСС: Дифференциальная подсистема ГНСС, в которой дифференциальные поправки используют в пределах от 2000 до 5000 км от контрольно-корректирующей станции дифференциальной подсистемы ГНСС (опорной станции).
4 Обозначения и сокращения
В настоящем стандарте использованы следующие обозначения и сокращения:
ВГС - высокоточная геодезическая сеть;
ГАЛИЛЕО - глобальная навигационная спутниковая система Европейского космического агентства;
ГГС - государственная геодезическая сеть;
ГЛОНАСС - глобальная навигационная спутниковая система Российской Федерации;
ГНСС - глобальная навигационная спутниковая система;
ГСП - глобальная система позиционирования;
НКА - навигационный космический аппарат;
ОП - опорный пункт;
ПН - пункт наблюдения;
ФАГС - фундаментальная астрономо-геодезическая сеть;
GPS - глобальная навигационная спутниковая система Соединенных Штатов Америки.
5 Основные положения
5.1 В основе всех методов определения координат пунктов наблюдения с использованием ГНСС лежит метод засечки положения аппаратуры потребителя (мобильного приемника) от известных положений НКА. Геометрия определения координат ПН относительно ОП показана на рисунке 1.
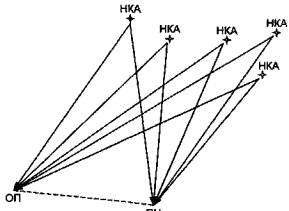
Рисунок 1
5.2 Определение относительных координат по измерениям псевдодальностей выполняется одним из двух методов: дифференциальным или относительным.
В дифференциальном методе по результатам наблюдений на опорном пункте формируются дифференциальные поправки к соответствующим параметрам наблюдений для определяемого пункта. Этот метод обеспечивает оперативное определение координат ПН (в реальном масштабе времени). В качестве ОП используются пункт локальной, региональной или широкозонной дифференциальной подсистем ГНСС. Выбор подсистемы зависит от удаленности ПН от ОП.
В относительном методе наблюдения, выполненные одновременно на опорном и определяемом пункте, обрабатываются совместно. При этом определяются приращения координат ПН относительно ОП. Определение координат ПН может проводиться в статическом режиме, позволяющем выполнять продолжительные сеансы наблюдений.
5.3 При выборе метода и технологии определения относительных координат по измерениям псевдодальностей учитываются требования к точности геодезических и землеустроительных работ.
Примечания:
1) В настоящее время приняты следующие ориентировочные требования к точности определения относительных координат:
геодинамические исследования, мониторинг сейсмических районов - (1-5) мм;
создание государственной геодезической сети ГГС (ФАГС, ВГС, специальные сети) - 1 см во взаимном положении пунктов ФАГС;
составление кадастровых карт при землеустройстве, межевание - (3-5) см;
водный кадастр, геодезическое обеспечение инженерных сооружений, мелиорация - (3-5) см в плане, (3-5) мм по высоте;
кадастр населенных пунктов, геодезическое обеспечение строительства, геодезический контроль сооружений - (1-2) см вынос точки в натуру, (1-3) мм контроль стабильности сооружений;
кадастр сельскохозяйственных земель, межевание - (3-10) см;
лесной кадастр, межевание - (0,1-0,5) м.
2) Дифференциальный метод определения относительных координат по кодовым псевдодальностям в настоящее время обеспечивают точность 0,5 м, по фазовым псевдодальностям от 1 до 500 мм. Относительный метод по фазовым псевдодальностям обеспечивает точность от единиц миллиметров до нескольких сантиметров.
5.4 Навигационная аппаратура потребителя, используемая для определения относительных координат по измерениям псевдодальностей при выполнении геодезических и землеустроительных работ, должна отвечать следующим требованиям:
работать по сигналам ГЛОНАСС и/или GPS и ГАЛИЛЕО;
по условиям применения (стационарная для опорных пунктов, переносная для работы на определяемых пунктах);
по количеству каналов обработки сигналов - многоканальная;
по точностным возможностям (с точностью определения относительных координат от нескольких дециметров до нескольких миллиметров);
по виду обрабатываемых сигналов (работающая в одно- и двухчастотном режимах);
по режимам измерений (кодовые и фазовые измерения).
Один из приемников аппаратуры потребителя располагается на ОП с известными координатами, а второй - на определяемом ПН.
5.5 Точностные возможности определения относительных координат по измерениям псевдодальностей зависят от:
метода обработки измеренных псевдодальностей;
погрешности шкалы времени аппаратуры спутника и потребителя;
погрешности бортовых эфемерид;
инструментальной ошибки аппаратуры спутника и потребителя;
ионосферной и тропосферной задержки сигнала;
удаленности определяемого пункта от опорного;
от числа НКА ГНСС, наблюдаемых на опорных и определяемых пунктах;
от геометрии расположения спутников.
5.6 Для
математического описания измеренной кодовой псевдодальности ![]() с ПН до i-го НКА используется уравнение вида:
с ПН до i-го НКА используется уравнение вида:
где с - скорость света в вакууме;
τiПН - разность между временем приема сигнала в аппаратуре потребителя и временем передачи этого сигнала со спутника;
![]() - геометрическая дальность;
- геометрическая дальность;
dtПH - поправка к часам приемника НПН;
dti - поправка к часам НКА;
TropiПН - поправка за влияние тропосферы;
lonoiПН - поправка за влияние ионосферы;
dmiПН - поправка за влияние многопутности на псевдодальность;
eiПН - погрешность измерения кодовой псевдодальности.
5.7 Для
математического описания измеренной фазовой псевдодальности ![]() используется уравнение:
используется уравнение:
где λ - длина волны сигнала несущей (λ = c/f0, f0 - частота сигнала несущей);
ΔφiПН - разность фазы сигнала, созданного в приемнике в момент приема сигнала, и фазой сигнала, созданного на спутнике в момент передачи сигнала;
NiПН - целочисленная неоднозначность фазы;
dmiПН - поправка за влияние многопутности фазы;
λeiПН - погрешность измерения фазовой псевдодальности.
6 Дифференциальный метод определения координат
6.1 В дифференциальном методе приемник ОП (базовая станция), имея точные координаты фазового центра своей антенны, определяет из наблюдений НКА поправки для кодовых псевдодальностей (или фазовых псевдодальностей). С использованием этих, так называемых дифференциальных поправок, передаваемых на ПН, корректируются измерения соответствующих навигационных параметров в приемнике ПН (мобильном приемнике), в результате чего повышается точность определения его координат.
Дифференциальные поправки от базовой станции к мобильному приемнику передаются при постобработке или в реальном масштабе времени с использованием радиомодема или других средств беспроводной связи. Это дает возможность оперативно получать координаты ПН (после очередного измерения).
6.2 При удалении ПН от ОП на расстояния до 200 км обслуживание обработки кодовых псевдодальностей выполняет локальная дифференциальная подсистема, в которой работает одна опорная станция. При удалении ПН от ОП на расстояниях от 200 до 2000 км обслуживание обработки кодовых псевдодальностей выполняет региональная дифференциальная подсистема. Она строит пространственно-временную модель поправок, то есть учитываются изменения в поправках по мере удаления НП от опорного пункта. В широкозонной дифференциальной подсистеме размер обслуживаемой области может достигать 5000 км. Если дифференциальный метод по наблюдениям фазы несущей обслуживается единственным базовым пунктом, то расстояния должны быть в пределах 10 км и редко до 30 км. При использовании метода множественных опорных пунктов размер области может достигать нескольких сотен километров.
Вычисляются дифференциальные поправки для измеренных кодовых псевдодальностей. Для этого составляются уравнения наблюдения вида (1) для ОП:
|
|
(3) |
Геометрическая дальность ![]() рассчитывается как расстояние между спутником
в момент выхода сигнала и приемником в момент приема сигнала с использованием
формулы:
рассчитывается как расстояние между спутником
в момент выхода сигнала и приемником в момент приема сигнала с использованием
формулы:
где Xi, Yi, Zi и XОП, YОП, ZОП - координаты
НКА, вычисляемые поданным навигационного сообщения с учетом поворота Земли за время
прохождения сигнала, и координаты ОП. При учете ошибки ![]() бортовых эфемерид НКА погрешность ΔρiОП в псевдодальности на опорном пункте составит:
бортовых эфемерид НКА погрешность ΔρiОП в псевдодальности на опорном пункте составит:
|
|
(5) |
Погрешность ΔρiОП транслируется как дифференциальная поправка. На опорном пункте отыскиваются поправки к измеренным кодовым псевдодальностям для всех наблюдаемых НКА в каждую эпоху наблюдения.
Значение измеренной псевдодальности на ПН корректируется по формуле:
|
|
(6) |

Составляется система уравнений поправок наблюдения с учетом условий:

В матричном представлении система уравнений поправок для всех наблюдений имеет вид
|
AX-L = V, |
где
|
|
(8) |
|
|
(9) |
Данная система уравнений решается по МНК с весовой матрицей Р:
X = (АТРА)-1АТРL - вектор поправок к координатам ПН и к часам аппаратуры потребителя,
Q = (ATDA)-1 - корреляционная матрица решения,
![]() - ошибка единицы веса,
- ошибка единицы веса,
![]() - средняя квадратическая
погрешность j-го параметра (jj - диагональный
элемент матрицы Q).
- средняя квадратическая
погрешность j-го параметра (jj - диагональный
элемент матрицы Q).
![]() - дисперсия поправок к измеренным псевдодальностям.
- дисперсия поправок к измеренным псевдодальностям.
6.4 Реализация дифференциального метода по измерениям фазовых псевдодальностей требует разрешения фазовых неоднозначностей, что предполагает использование достаточно длительных рядов наблюдений. Образование разностей между спутниками и между приемниками эффективно исключает все смещения из-за ошибок генераторов часов и в то же время значительно уменьшает другие смещения (за исключением неоднозначности фаз).
Определение относительных координат дифференциальным методом по кодовым псевдодальностям выполняется с использованием следующего алгоритма:
Вычисляются дифференциальные поправки для измеренных фазовых псевдодальностей. Для этого на ОП из наблюдения первой эпохи вычисляется целое число NiОП
|
|
(10) |
где обозначения соответствуют принятым в формулах (1) и (2).
Далее определяется фазовая псевдодальность,
близкая к измеренной кодовой псевдодальности ![]()
|
|
(11) |
и вычисляется среднее значение μОП невязки дальностей (формула 11), полученных на ОП до всех НКА в начальную эпоху, и геометрических дальностей (формула 4):
|
|
(12) |
Этой поправкой корректируется фазовая псевдодальность в начальную эпоху:
|
|
(13) |
Изменение невязки от эпохи к эпохе и поправки фазовой псевдодальности вычисляется по формулам:
|
|
(14) |
Фазовые поправки (14) передаются на ПН.
С использованием этих поправок вычисляются скорректированные значения измеренной фазовой псевдодальности на ПН:
|
|
(15) |
Составляется уравнение одинарной
разности для ОП и ПН с использованием соотношения (11) для ![]() и (формула 2)
для
и (формула 2)
для ![]() , которое после преобразования имеет
вид:
, которое после преобразования имеет
вид:
|
|
(16) |

В левой части содержится
исправленная фазовая псевдодальность ![]() с обратным знаком. Разности между двумя
спутниками определяются на основе соотношения:
с обратным знаком. Разности между двумя
спутниками определяются на основе соотношения:
|
|
(17) |

С использованием данного соотношения вычисляются приращения координат ПН относительно ОП по исправленным измеренным фазовым псевдодальностям с этого пункта. В качестве неоднозначности оценивается модифицированная неоднозначность:
|
|
(18) |
Составление и решение системы уравнений поправок наблюдений по формуле (17) с оценкой точности выполняется аналогично с указанной в 6.3.
Примечание - Приведенный алгоритм обеспечивает точность на уровне единиц миллиметров при удалении от опорной станции до 10 км, то есть в области действия локальной дифференциальной подсистемы ГНСС. Для больших дальностей используются другие подсистемы (региональная и широкозонная дифференциальные подсистемы ГНСС).
7 Относительный метод определения координат
7.1 В относительном методе наблюдения НКА, выполненные одновременно на опорном и определяемом пункте, обрабатываются совместно. Из обработки синхронных наблюдений одних и тех же НКА, полученных на ОП и ПН, определяются разности координат этих пунктов (ΔХ = ХПН – ХОП, ΔY = YПН – YОП, ΔZ = ZПН – ZОП) - проекции базовой линии на оси координат.
7.2 Определение относительных координат по кодовым псевдодальностям выполняется с использованием следующего алгоритма:
Для каждого синхронного измерения до НКА
|
|
(19) |

формируются разности
|
|
При образовании разности исключаются погрешности орбиты и часов НКА.
По этим разностям составляется система уравнений поправок наблюдений с учетом условий
В матричном представлении полученная система уравнений поправок для всех синхронных наблюдений имеет вид (формулы 7),
где
|
|
(21) |
|
|
(22) |
Данная система уравнений решается способом, аналогичным способу решения системы уравнений (формулы 7).
Ключевые слова: глобальные навигационные спутниковые системы, геодезические и землеустроительные работы, относительные координаты, псевдодальность