МИНИСТЕРСТВО МОНТАЖНЫХ И
СПЕЦИАЛЬНЫХ СТРОИТЕЛЬНЫХ РАБОТ СССР
ГЛАВНОЕ ТЕХНИЧЕСКОЕ УПРАВЛЕНИЕ
УТВЕРЖДАЮ
Заместитель министра монтажных и
специальных строительных работ СССР
Л. Д. Солоденников
5 ноября 1974 г.
УКАЗАНИЯ
ПО МОНТАЖУ ТЕХНОЛОГИЧЕСКОГО
ОБОРУДОВАНИЯ САМОХОДНЫМИ
СТРЕЛОВЫМИ КРАНАМИ
ВСН 337-74
ММСС СССР
Москва - 1975
СОДЕРЖАНИЕ
Настоящие Указания разработаны на основе обобщения и анализа передового опыта монтажа технологического оборудования самоходными стреловыми кранами и исследований, проведенных в лаборатории технологии и механизации работ по монтажу технологического оборудования ВНИИМонтажспецстроя.
При составлении Указаний были использованы разработки ПИ Промстальконструкция.
Приведенные в Указаниях схемы монтажа многократно опробованы на строительстве нефтехимических предприятий с одновременными тензометрическими исследованиями нагрузок в элементах крана.
Указаниями следует руководствоваться при составлении ППР и технологических карт, а также при производстве монтажных работ и контроле за их подготовкой и проведением.
Указания разработаны ВНИИМонтажспецстроем с участием ЦКБ Главстроймеханизации согласно приказу Минмонтажспецстроя СССР № 151 от 12 мая 1972 г.
Указания разработаны старшим научным сотрудником лаборатории технологии и механизации работ по монтажу технологического оборудования ВНИИМонтажспецстроя В.М. Федоровым при участии заведующего лабораторией докт. техн. наук проф. П.А. Зимина, зам. директора по научной работе ВНИИМСС А.Л. Зильберберга и главного конструктора проекта ЦКБ Главстроймеханизации Ю.И. Гудкова.
|
Минмонтажспецстрой СССР |
Ведомственные строительные нормы |
ВСН 337-74 ММСС СССР |
|
Указания по монтажу технологического оборудования самоходными стреловыми кранами |
Взамен МСН 124-66 ММСС СССР МСН 176-68 ММСС СССР |
1. ОБЩИЕ ПОЛОЖЕНИЯ
1.1. Настоящие Указания распространяются на монтаж технологического оборудования самоходными стреловыми кранами СКГ, МКГ, МКТ, а также кранами К-255 и не распространяются на монтаж кранами-экскаваторами, автомобильными и железнодорожными кранами.
1.2. Указаниями следует руководствоваться при составлении ППР и технологических карт на монтаж технологического оборудования кранами в соответствии с "Инструкцией по разработке проектов производства механомонтажных работ" ВСН 319-73/ММСС СССР при подготовке и проведении монтажа, а также при погрузке и разгрузке указанными кранами оборудования с транспортных средств.
1.3. В Указаниях рассмотрены схемы монтажа технологического оборудования кранами на примере вертикальных и горизонтальных аппаратов.
1.4. Согласно статье 331 "Правил устройства и безопасной эксплуатации грузоподъемных кранов допускаются подъем и перемещение груза несколькими кранами.
|
Внесены Всесоюзным научно-исследовательским институтом по монтажным и специальным строительным работам Минмонтажспецстроя СССР |
Утверждены Минмонтажспецстроем СССР 5 ноября 1974 г. |
Срок введения 1 января 1975 г. |
2. ВЫБОР СХЕМЫ ПОДЪЕМА
2.1. Метод и схему подъема аппарата выбирают в зависимости от его размеров и массы, характеристик имеющихся кранов, высоты и конфигурации фундамента под аппарат и компоновки технологической установки.
2.2. В Указаниях приведены схемы монтажа вертикального оборудования при помощи одиночных и спаренных кранов со скольжением низа аппарата по основанию (методом скольжения) и поворотом вокруг шарнира (метод поворота), а также схемы монтажа горизонтальных аппаратов.
2.3. Подъем аппаратов методом скольжения наиболее прост и производителен; при этом низ аппарата перемещают к фундаменту на тележках или санях дополнительными средствами.
2.4. При отсутствии кранов, грузоподъемность которых обеспечивает монтаж аппаратов методом скольжения, следует проверить возможность подъема и установки аппаратов методом поворота вокруг шарнира.
2.5. Возможность подъема вертикального аппарата методом поворота вокруг шарнира устанавливают, проверяя устойчивость фундамента при приложении максимального горизонтального усилия, возникающего в процессе подъема (приложение 1).
2.6. При отсутствии кранов, паспортная грузоподъемность которых обеспечивает подъем и установку оборудования, следует использовать схемы подъема с временным увеличением грузовысотных характеристик кранов:
а) с временно расчаленными стрелами, в том числе с маневренными;
б) со стрелами, соединенными ригелем;
в) со стрелами, опирающимися на А-образные шевры.
В этом случае нагрузки на элементы кранов не должны превышать допустимых при обычном режиме.
2.7. При работе кранов с расчаленными маневренными стрелами можно поднимать оборудование методом скольжения и поворота вокруг шарнира.
В стесненных условиях, когда невозможно разместить расчалки стрел двух кранов, оборудование, масса которого превышает суммарную паспортную грузоподъемность кранов, следует монтировать кранами со стрелами, соединенными ригелем или опирающимися на А-образные шевры. В этой случае с помощью кранов можно только поднимать и опускать груз.
2.8. В ППР и технологических картах следует принимать такое взаимное расположение кранов и подъемного оборудования, которое обеспечивает:
а) возможно меньший вылет крюка в процессе подъема и установки оборудования;
б) соответствие максимального вылета крюка начальному моменту подъема оборудования;
в) возможно меньший диапазон изменения вылета крюка под нагрузкой в процессе подъема и установки оборудования;
г) минимальное (в пределах, указанных в таблице 1) отклонение грузового полиспаста от вертикали, особенно из плоскости стрелы;
д) наименьшую длину пути передвижения крана с грузом и расположением стрелы предпочтительно вдоль направления передвижения;
е) при спаренной работе кранов поочередное передвижение одного крана и поворот платформы с изменением вылета крюка другого крана;
ж) расстояние между стрелой крана и аппаратом не менее 0,5 м.
2.9. При установке монтажных элементов на значительной высоте и выполнении работ, требующих большого подстрелового пространства, технологическое оборудование следует монтировать методом скольжения с помощью кранов, оснащенных башенно-стреловым оборудованием (БСО); при этом спаренные краны с БСО можно применять в тех случаях, когда краны совершают рабочие операции (подъем, опускание и изменение вылета крюка) без передвижения и поворота платформы.
Технология монтажа с применением этого оборудования аналогична технологии подъема кранами, оснащенными стрелами. При разработке ППР на подъем этим способом следует учитывать, что передвижение кранов СКГ-40, 63, 100 и 160 с грузом на крюке БСО запрещено.
Таблица 1
Допустимые углы отклонения от вертикали грузовых полиспастов* самоходных стреловых кранов с нагрузкой, равной их номинальной грузоподъемности для различных длин стрел
*Углы отклонения грузовых полиспастов от вертикали даны применительно к горизонтальной установке крана.
При наклоне площадки в допускаемых углах отклонения грузовых полиспастов следует учитывать как угол наклона площадки, так и угол отклонения грузового полиспаста при производстве рабочих операций кранами.
Для кранов, работающих с расчаленными, опирающимися и соединенными ригелем стрелами, допустимые углы отклонения грузовых полиспастов от вертикали приведены в соответствующих разделах настоящих Указаний.
Проверять фактические углы отклонения грузовых полиспастов следует во время работы кранов с помощью имеющихся в монтажной организации приборов и инструментов, в том числе, например, теодолитом, установленным на кране.
Контролировать угол отклонения грузового полиспаста из плоскости подвеса стрелы можно способом, предложенным ПИ Промстальконструкция:
а) на нижней плоскости стрелы, перпендикулярной плоскости ее подвеса (на четырехгранной стреле - также и на верхней плоскости), наносят яркой краской осевую линию стрелы;
б) на указанной нижней плоскости на расстоянии не менее 3 м от оголовка стрелы устанавливают яркоокрашенную рейку, длину которой определяют по максимально допустимому углу отклонения, приведенному в табл. 1 настоящих Указаний.
|
Длина стрелы крана, стрелы (башни) и маневрового клюва БСО, м |
Максимальный допустимый угол отклонения грузового полиспаста от вертикали, град |
|
|
1 |
2 |
3 |
|
МКГ-25 |
12,5 |
3 |
|
22,5 |
3 |
|
|
32,5 |
3 |
|
|
МКГ-25БР |
13,5 |
3 |
|
23,5 |
3 |
|
|
33,5 |
3 |
|
|
18,5 + 10 |
2 |
|
|
28,5 + 20 |
2 |
|
|
СКГ-40 |
15 |
3 |
|
25 |
2 |
|
|
35 |
1 |
|
|
30 + 26 |
1 |
|
|
СКГ-63 |
15 |
3 |
|
30 |
2 |
|
|
40 |
1 |
|
|
30,5 + 24 |
1 |
|
|
СКГ-100 |
20 |
3 |
|
30 |
2 |
|
|
40 |
1 |
|
|
35 + 29 |
1 |
|
|
СКГ-160 |
30 |
3 |
|
40 |
2 |
|
|
50 |
1 |
|
|
45 + 40 |
1 |
|
|
К-255 МКТ-40 |
15 |
3 |
При работе кранов с БСО должно быть обеспечено сохранение вертикальности грузового полиспаста в допустимых пределах (см. табл. 1). Подъем вертикального оборудования методом поворота вокруг шарнира с БСО запрещается.
2.10. Для обеспечения вертикальности грузовых полиспастов в допустимых пределах следует выполнять рабочие операции в заранее установленной последовательности, а в ППР или технологической карте должна быть приведена циклограмма рабочих операций, выполняемых участвующими в подъеме кранами и другими средствами.
На циклограмме подъема аппарата методом скольжения должны быть представлены значения перемещений опорной части аппарата в зависимости от величины перемещения места его строповки, а также очередность выполнения рабочих операций кранами, обеспечивающая вертикальность грузовых полиспастов в пределах, указанных в таблице 1.
На циклограмме подъема аппарата методом поворота вокруг шарнира должны быть указаны положения оси аппарата по отношению к горизонту в начале и в конце данного цикла, периодичность выполнения рабочих операций кранами с указанием величины перемещения крюка по вертикали и горизонтали.
3. ПОДГОТОВИТЕЛЬНЫЕ РАБОТЫ
3.1. Перед подъемом оборудования кранами должны быть выполнены следующие работы:
а) подготовка монтажной площадки;
б) проверка фундамента, в том числе расположения фундаментных болтов;
в) подготовка оборудования и укладка его в исходное положение перед подъемом;
г) подготовка к работе и установка в исходное положение монтажного крана и других грузоподъемных средств;
д) строповка поднимаемого оборудования.
3.2. Подготовку монтажной площадки к производству работ необходимо проводить в следующем порядке.
3.2.1. До начала монтажных работ должны быть подготовлены дороги для доставки оборудования и перемещения кранов.
3.2.2. К началу монтажных работ подготавливают площадку в местах подвоза и размещения оборудования перед подъемом, установки и работы кранов.
3.2.3. При подъеме аппаратов методом скольжения подготавливают путь перемещения низа аппарата.
3.2.4. При подъеме вертикального оборудования методом поворота вокруг шарнира шарниры устанавливают на фундаменте (приливе), рядом с фундаментом и на разрезанной опорной части аппарата. Предпочтительно устанавливать шарнир на фундаменте (приливе).
При подъеме оборудования спаренными кранами следует применять шарниры открытого типа, не воспринимающие отрицательную реакцию.
В местах расположения поворотного шарнира необходимо подготовить основание, выдерживающее без просадки давление, равное отношению максимальной нагрузки к площади основания шарнира. Во избежание перекоса шарнира при подъеме вертикальных аппаратов плиту этого шарнира следует укладывать рядом с фундаментом на выверенное шпальное основание.
3.2.5. Угол уклона поверхности рабочей площадки должен быть минимальным и находиться пределах допускаемых углов отклонения грузовых полиспастов от вертикали. Проверять уклон площадки следует с помощью нивелира или других приборов.
В местах установки и передвижения кранов с грузом несущая способность основания должна соответствовать величине максимальных опорных давлений кранов в процессе подъема, приведенных в паспортах кранов. Определять прочностные данные грунтового основания можно с помощью ударника ДорНИИ*.
*См. "Инструкцию по технике безопасности при эксплуатации стреловых самоходных кранов" ВСН 274-74/ММСС СССР. М., ЦБНТИ, 1974.
При недостаточной несущей способности основания под гусеницы крана или выносные опоры следует укладывать инвентарные настилы, железобетонные или металлические щиты.
3.3. При подготовке аппарата и укладке его в исходное положение перед подъемом следует выполнить приведенные ниже работы.
3.3.1. При укладке вертикального аппарата в исходное положение перед подъемом необходимо: расположить ось аппарата в плоскости подъема с таким расчетом, чтобы после его подъема на фундамент не было необходимости в развороте аппарата. До этого следует проверить по шаблону совпадение расположения фундаментных болтов с соответствующими отверстиями в опорной плите аппарата.
3.3.2. Укладывать горизонтальные аппараты в исходное положение перед подъемом необходимо согласно схемам, приведенным в разделе 5 настоящих Указаний.
3.3.3. Для ускорения и удешевления монтажных работ до начала подъема на аппарате следует смонтировать площадки с ограждениями и лестницами и обвязочные трубопроводы, а корпус аппарата и трубопроводы покрыть тепловой изоляцией с устройством защитного покрытия, кроме мест расположения монтажных штуцеров и стропов. Смонтированные на аппарате площадки, лестницы и трубопроводы не должны задевать в процессе подъема за грузовые полиспасты и стрелы кранов, а также за расчалки.
3.3.4. При подъеме вертикального технологического оборудования методом поворота вокруг шарнира необходимо, кроме указанных выше подготовительных работ, установить шарнир и закрепить в нем опорную часть аппарата. Особое внимание при установке шарнира следует уделить разметке оси расположения шарнира и главной оси подъема аппарата. Ось шарнира должна быть горизонтальна и перпендикулярна плоскости подъема аппарата. Негоризонтальность оси шарнира и неперпендикулярность ее к плоскости подъема аппарата вызывают отклонение грузового полиспаста крана от вертикали.
Если ось шарнира приходится располагать (рис. 1) ниже или выше опорной плоскости фундамента, то для точной установки аппарата в вертикальное положение необходимо обеспечить равенство расстояний от оси шарнира до ближайшей точки опорного кольца аппарата в исходном и проектном положениях (R2 = R1) а также равенство расстояний от оси шарнира до опорной плоскости аппарата в исходном и проектном положениях (a2 = a1).

Рис. 1. Схема взаимного расположения аппарата и фундамента перед подъемом:
а) ось шарнира на одном уровне с опорной плоскостью фундамента; б) ось шарнира ниже уровня опорной плоскости фундамента; в) ось шарнира выше уровня опорной плоскости фундамента; 1 - аппарат; 2 - фундамент
3.3.5. Допуск на расстояния R1 и R2 определяется допусками на точность расположения анкерных болтов в отверстиях опорной части аппарата. Допуск на расстояния a1 и a2 не должен превышать половины высоты дополнительной подливки фундамента.
Допуск на негоризонтальность оси шарнира и неперпендикулярность ее к плоскости подъема определяется допустимым углом отклонения грузового полиспаста крана для положения аппарата, близкого к нейтральному, с учетом места его строповки и расположения центра тяжести.
3.4. Подготовку к работе и установку в исходное положение крана следует выполнять в приведенном ниже порядке.
3.4.1. Перед началом подъема оборудования крановщик обязан произвести наружный осмотр крана согласно требованиям "Правил устройства и безопасной эксплуатации грузоподъемных кранов". После этого на холостом ходу проверяют действие механизмов крана, ограничителей грузоподъемности и высоты подъема крюка, выносных опор, а также звукового сигнала.
3.4.2. Перед подъемом оборудования спаренными кранами, а также при подъеме методом поворота вокруг шарнира одиночными кранами следует отрегулировать муфту предельного момента крана в соответствии с требованиями, изложенными в инструкции по его эксплуатации. Если муфта предельного момента в механизме поворота отсутствует, необходимо на период подъема оборудования ослабить или отключить тормоз механизма поворота крана.
3.4.3. После осмотра и проверки кран устанавливают согласно ППР или технологической карте в исходное положение перед подъемом на ранее подготовленное основание.
3.5.1. После установки кранов в исходное положение необходимо:
закрепить на аппарате тормозную оттяжку;
закрепить систему, подтаскивающую низ аппарата;
при подъеме аппарата методом поворота вокруг шарнира закрепить на аппарате боковые расчалки и тормозные оттяжки, а при подъеме в два этапа с последующим дотягиванием до нейтрального положения закрепить на аппарате дотягивающую систему;
застропить аппарат (рис. 2), предусмотрев средства для его расстроповки.
3.6. При монтаже горизонтальных аппаратов спаренными кранами строповку следует осуществлять в наиболее удаленных друг от друга местах по продольной оси аппарата.
Рис. 2. Способы строповки аппаратов:
а - одним краном за монтажные штуцеры, приваренные к головке аппарата (при этом способе следует применять подкладки, исключающие повреждение корпуса аппарата и стропа); б - одним краном через траверсу за монтажные штуцеры, приваренные к головке аппарата; в - одним краном за монтажную скобу; г - двумя кранами за монтажные штуцеры, приваренные к головке аппарата; д - двумя кранами за монтажные штуцеры, приваренные к средней части аппарата; е - одним краном через траверсу за среднюю часть аппарата; ж - двумя кранами за корпус аппарата; з - одним краном за штуцеры на днищах аппарата; и - двумя кранами за штуцеры на днищах аппарата
4. ПОДЪЕМ ВЕРТИКАЛЬНЫХ АППАРАТОВ
А. Подъем методом скольжения
4.1. Подъем вертикальных аппаратов методом скольжения следует осуществлять по одной из схем, приведенных на рис. 3:
подъем аппарата одним краном со строповкой за вершину (рис. 3, а);
подъем аппарата одним краном со строповкой за корпус по образующей аппарата (рис. 3, б);
подъем аппарата спаренными кранами:
без их передвижения (рис. 3, д, ж, з),
при их передвижении (рис. 3, в, г, и).
4.2. При подъеме методом скольжения опорную часть аппарата следует плавно перемещать краном или на тележках по инвентарным путям, или на санях по земле с помощью полиспастов, используя в качестве тягового механизма лебедки или тракторы таким образом, чтобы исключить динамические нагрузки и отклонение грузовых полиспастов кранов от вертикали на величину, превышающую указанную в табл. 1.
Средства для перемещения опорной части аппарата (тележку или сани) выбирают, исходя из нагрузок на эти устройства. При нагрузке от опорной части аппарата до 50 тс применяют сани, свыше 50 тс - тележки на рельсовом ходу. Применять трубоукладчики для перемещения опорной части аппарата на крюке не рекомендуется.
4.3. Скорость перемещения Vн опорной части аппарата без отрыва от земли в зависимости от угла его подъема j для различных скоростей подъема крюка V крана приведена на рис. 4. Скорость навивки каната на барабан тяговой лебедки следует выбирать в зависимости от скорости перемещения Vн опорной части аппарата и кратности запасовки каната в подтаскивающей системе.
Необходимое усилие для подтаскивания аппаратов за опорную часть (Sпод) определяют для начального момента подъема аппарата из уравнения:
Sпод = P×![]() fтр, тс, (1)
fтр, тс, (1)
где Р - масса аппарата, т;
l - расстояние от торца опоры аппарата до места строповки, м;
L - расстояние от торца опоры аппарата до его центра тяжести, м;
fтр - коэффициент трения между санями и поверхностью (при подтаскивании по земле fтр = 0,5; по снегу fтр = 0,1).
Рис. 3. Основные схемы подъема вертикальных аппаратов кранами методом скольжения:
I, II, III, IV - положения аппарата в процессе подъема
Рис. 4. График изменения скорости перемещения низа вертикального аппарата от угла подъема:
Vн - скорость перемещения низа аппарата, м/мин; V - скорость подъема аппарата, м/мин; j - угол подъема аппарата, град
4.4. В Указаниях приведены масса, диаметр и высота, вертикальных аппаратов, которые могут быть подняты и установлены кранами различных типоразмеров, а также усилия, возникающие при подъеме в подтаскивающей системе.
4.4.1. При разработке схем приняты следующие исходные условия:
а) центр тяжести аппарата расположен посредине аппарата;
б) усилие в подтаскивающей системе - максимальное для условия передвижения нижнего конца аппарата по грунту на металлических санях.
В схемах и таблицах к ним приняты следующие обозначения:
A - высота подъема крюка крана, м;
L - длина стрелы крана, м;
 вылет крюка крана, м;
вылет крюка крана, м;
d - диаметр аппарата, м;
H - высота аппарата, м;
l - расстояние от торца опоры аппарата до места cтроповки, м;
Q - грузоподъемность крана на потребном вылете крюка, т;
Р - масса аппарата, т;
S - усилие в подтаскивающей системе при методе скольжения и в дотягивающей при методе поворота вокруг шарнира, тc;
h - высота фундамента, м;
h0 - расстояние между основанием и опорной частью аппарата, м;
Z - расстояние между крюком крана и местом строповки аппарата, м;
j - угол подъема аппарата, град.;
a - угол между дотягивающей системой и горизонталью, град.
4.5. Подъем вертикального аппарата методом скольжения одним краном со строповкой за вершину (рис. 5) следует применять при установке аппарата на фундамент любой высоты и наличии у крана рабочего оборудования, которое обеспечивает в процессе монтажа размещение аппарата в подстреловом пространстве.
Грузоподъемность крана на необходимом вылете крюка должна быть не менее массы аппарата.
В табл. 2 приведены максимальные параметры вертикальных аппаратов, которые могут быть подняты кранами различных типоразмеров по этой схеме.
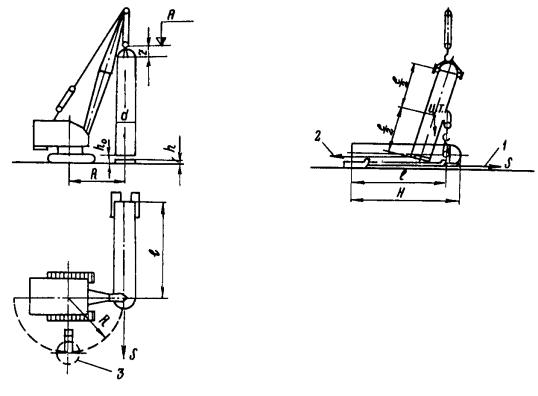
Рис. 5. Схема подъема аппарата одним краном методом скольжения при строповке за вершину (строповка согласно рис. 2, а):
1 - подтаскивающая система; 2 - тормозная система; 3 - проектное положение аппарата
Таблица 2
Максимальные параметры вертикальных аппаратов, которые могут быть подняты стреловыми кранами соответствующих типоразмеров по схеме рис. 5, а также значения усилия в подтаскивающей системе (h = 0,35 м; h0 = 0,65 м; z = d)
|
Модель крана |
Длина стрелы, м |
Показатели |
|||||||
|
A, м |
R, м |
d, м |
H, м |
l, м |
P, м |
S, м |
|||
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
|
Гусеничные |
МКГ-25 |
12,5 |
12,7 |
3,8 |
1 |
11,5 |
11,05 |
25 |
6,3 |
|
10,35 |
1,5 |
8,7 |
8,2 |
||||||
|
8,1 |
2 |
5,9 |
5,45 |
||||||
|
5,5 |
2,5 |
2,9 |
2,45 |
||||||
|
22,5 |
20,9 |
4 |
1 |
19,7 |
19,25 |
16 |
4 |
||
|
16,5 |
1,5 |
14,8 |
14,35 |
||||||
|
12,9 |
2 |
10,7 |
10,25 |
||||||
|
9,6 |
2,5 |
5,9 |
5,45 |
||||||
|
32,5 |
32 |
5,0 |
1 |
30,8 |
30,35 |
10 |
2,5 |
||
|
28,4 |
1,5 |
26,7 |
26,25 |
||||||
|
24,2 |
2 |
22,0 |
21,55 |
||||||
|
19,85 |
2,5 |
17,2 |
16,7 |
||||||
|
16 |
3 |
12,9 |
12,45 |
||||||
|
12,15 |
3,5 |
8,5 |
8 |
||||||
|
7,85 |
4 |
3,7 |
3,2 |
||||||
|
СКГ-30 |
15 |
12,45 |
5 |
1 |
11,3 |
10,8 |
30 |
7,5 |
|
|
11,75 |
1,5 |
10,1 |
9,6 |
||||||
|
11,15 |
2 |
9,0 |
8,5 |
||||||
|
10,7 |
2,5 |
8,0 |
7,55 |
||||||
|
10,35 |
3 |
7,2 |
6,7 |
||||||
|
9,85 |
3,5 |
6,2 |
5,7 |
||||||
|
9,35 |
4 |
5,2 |
4,7 |
||||||
|
20 |
17,8 |
6,15 |
1 |
16,6 |
16,15 |
20 |
5 |
||
|
17,2 |
1,5 |
15,5 |
15,05 |
||||||
|
16,4 |
2 |
14,2 |
13,75 |
||||||
|
15,9 |
2,5 |
13,2 |
12,75 |
||||||
|
15,4 |
3 |
12,2 |
11,75 |
||||||
|
14,9 |
3,5 |
11,2 |
10,75 |
||||||
|
14,4 |
4 |
10,2 |
9,75 |
||||||
|
25 |
22,5 |
7,35 |
1 |
21,3 |
20,85 |
15 |
3,75 |
||
|
22 |
1,5 |
20,3 |
19,85 |
||||||
|
21,3 |
2 |
19,1 |
18,65 |
||||||
|
20,8 |
2,5 |
18,1 |
17,65 |
||||||
|
20,2 |
3 |
17,0 |
16,55 |
||||||
|
19,65 |
3,5 |
15,9 |
15,4 |
||||||
|
19,2 |
4 |
15,0 |
14,55 |
||||||
|
СКГ-40 |
15 |
12,6 |
4,5 |
1 |
11,4 |
10,95 |
40 |
10 |
|
|
11,85 |
1,5 |
10,2 |
9,7 |
||||||
|
11,3 |
2 |
9,1 |
8,65 |
||||||
|
10,75 |
2,5 |
8,1 |
7,6 |
||||||
|
10,35 |
3 |
7,2 |
6,7 |
||||||
|
9,85 |
3,5 |
6,2 |
5,7 |
||||||
|
9,35 |
4 |
5,2 |
4,7 |
||||||
|
20 |
18 |
6,15 |
1 |
16,8 |
16,35 |
20 |
5 |
||
|
17,5 |
1,5 |
15,8 |
15,36 |
||||||
|
16,85 |
2 |
14,7 |
14,2 |
||||||
|
16,4 |
2,5 |
13,7 |
13,25 |
||||||
|
15,9 |
3 |
12,7 |
12,25 |
||||||
|
15,4 |
3,5 |
11,7 |
11,25 |
||||||
|
14,9 |
4 |
10,7 |
10,25 |
||||||
|
25 |
22,5 |
7,35 |
1 |
21,3 |
20,85 |
15 |
3,75 |
||
|
21,9 |
1,5 |
20,2 |
19,75 |
||||||
|
21,5 |
2 |
19,3 |
18,85 |
||||||
|
20,95 |
2,5 |
18,3 |
17,8 |
||||||
|
20,4 |
3 |
17,2 |
16,75 |
||||||
|
19,95 |
3,5 |
16,3 |
15,8 |
||||||
|
19,5 |
4 |
15,3 |
14,85 |
||||||
|
СКГ-63 |
15 |
15 |
4,5 |
1 |
13,8 |
13,35 |
63 |
15,7 |
|
|
15 |
1,5 |
13,3 |
12,85 |
||||||
|
15 |
2 |
12,8 |
12,35 |
||||||
|
1,5 |
2,5 |
12,3 |
11,85 |
||||||
|
14,45 |
3 |
11,3 |
10,8 |
||||||
|
13,4 |
3,5 |
9,8 |
9,35 |
||||||
|
12,55 |
4 |
8,4 |
7,9 |
||||||
|
30 |
28,8 |
6 |
1 |
27,6 |
27,15 |
35 |
8,75 |
||
|
28,8 |
1,5 |
27,1 |
26,65 |
||||||
|
28,8 |
2 |
26,15 |
26,15 |
||||||
|
28,8 |
2,5 |
26,1 |
25,65 |
||||||
|
28,25 |
3 |
25,1 |
24,6 |
||||||
|
26,75 |
3,5 |
23,1 |
22,6 |
||||||
|
25,4 |
4 |
21,2 |
20,75 |
||||||
|
40 |
38,8 |
7 |
1 |
37,6 |
37,15 |
25 |
6,25 |
||
|
38,8 |
1,5 |
37,1 |
36,65 |
||||||
|
38,8 |
2 |
36,6 |
36,15 |
||||||
|
36,5 |
2,5 |
33,8 |
33,35 |
||||||
|
34,5 |
3 |
31,3 |
30,85 |
||||||
|
32,7 |
3,5 |
29,0 |
28,55 |
||||||
|
30,85 |
4 |
26,7 |
26,2 |
||||||
|
СКГ-100 |
20 |
19,5 |
6 |
1 |
18,3 |
17,85 |
100 |
25 |
|
|
19,5 |
1,5 |
17,8 |
17,35 |
||||||
|
19,5 |
2 |
17,3 |
16,85 |
||||||
|
19,5 |
2,5 |
16,8 |
16,35 |
||||||
|
18,95 |
3 |
15,8 |
15,3 |
||||||
|
17,4 |
3,5 |
13,7 |
13,25 |
||||||
|
16,5 |
4 |
12,3 |
11,85 |
||||||
|
40 |
37,5 |
9,5 |
1 |
36,3 |
35,85 |
30 |
7,5 |
||
|
37,5 |
1,5 |
35,8 |
35,35 |
||||||
|
37,5 |
2 |
35,3 |
34,85 |
||||||
|
37,5 |
2,5 |
34,8 |
34,35 |
||||||
|
37,5 |
3 |
34,3 |
33,85 |
||||||
|
37,5 |
3,5 |
33,8 |
33,35 |
||||||
|
36,7 |
4 |
32,5 |
32,05 |
||||||
|
Пневмоколесные на временных опорах |
К-255 |
15 |
10,6 |
4,5 |
1 |
9,4 |
8,95 |
25 |
6,25 |
|
9,85 |
1,5 |
8,2 |
7,7 |
||||||
|
9 |
2 |
6,8 |
6,35 |
||||||
|
8,4 |
2,5 |
5,7 |
5,25 |
||||||
|
20 |
15,8 |
5,5 |
1 |
14,6 |
14,15 |
17 |
4,25 |
||
|
15 |
1,5 |
13,3 |
12,85 |
||||||
|
14,3 |
2 |
12,1 |
11,65 |
||||||
|
13,5 |
2,5 |
10,8 |
10,35 |
||||||
|
12,6 |
3 |
9,4 |
8,94 |
||||||
|
12 |
3,5 |
8,3 |
7,85 |
||||||
|
11,2 |
4 |
7,0 |
6,55 |
||||||
|
25 |
20,5 |
6,5 |
1 |
19,3 |
18,85 |
12 |
3 |
||
|
20 |
1,5 |
18,3 |
17,85 |
||||||
|
19,25 |
2 |
17,1 |
16,6 |
||||||
|
18,4 |
2,5 |
15,7 |
15,25 |
||||||
|
17,45 |
3 |
14,3 |
13,8 |
||||||
|
16,65 |
3,5 |
13,0 |
12,5 |
||||||
|
16 |
4 |
11,8 |
11,35 |
||||||
|
МКТ-40 |
15 |
14,75 |
3 |
1 |
13,6 |
13,1 |
40 |
10 |
|
|
11,15 |
1,5 |
9,5 |
9 |
||||||
|
25 |
24,75 |
4 |
1 |
23,6 |
23,1 |
25 |
6,25 |
||
|
24,75 |
1,5 |
23,1 |
22,6 |
||||||
|
22,85 |
2 |
20,7 |
20,2 |
||||||
|
16,75 |
2,5 |
14,1 |
13,6 |
||||||
|
11,75 |
3 |
7,6 |
7,1 |
||||||
|
35 |
34,75 |
4,5 |
1 |
33,6 |
33,1 |
13 |
3,5 |
||
|
34,75 |
1,5 |
33,1 |
32,6 |
||||||
|
30,6 |
2 |
28,4 |
27,95 |
||||||
|
36,1 |
2,5 |
23,4 |
22,95 |
||||||
|
21,1 |
3 |
17,9 |
17,45 |
||||||
|
16,4 |
3,5 |
12,7 |
12,25 |
||||||
|
11,2 |
4 |
7,0 |
6,55 |
||||||
4.5.1. Подъем аппарата необходимо производить по приведенной ниже технологии:
а) до нейтрального положения аппарат поднимают, не отрывая его низ от земли, одновременной работой механизма подъема крюка и механизма, подтаскивающего аппарат за опорную часть. При этом угол отклонения грузового полиспаста крана от вертикали в течение всего подъема должен находиться в пределах, указанных в табл. 1. Из нейтрального положения в вертикальное аппарат переводят, используя тормозную оттяжку;
б) приподнять аппарат над основанием, чтобы его низ был выше верха анкерных болтов фундамента не менее чем на 0,2 м; переместить аппарат поворотом платформы без изменения вылета крюка до положения, когда центр основания аппарата будет находиться на одной вертикали с центром фундамента;
в) завести низ аппарата на анкерные болты, опустить его на фундамент и выверить, затянуть болты и снять строп.
4.6. Подъем вертикального аппарата методом скольжения одним краном со строповкой за корпус (рис. 6) применяют при установке аппаратов, высота которых превышает высоту подъема крюка крана. Это достигается строповкой аппарата за корпус по образующей, в результате чего после отрыва от земли аппарат занимает наклонное положение.
Способ применяют при подъеме и установке аппаратов на фундаменты с разъемными анкерными болтами, когда размеры рабочего оборудования кранов не позволяют разместить в подстреловом пространстве аппарат при строповке его за вершину. Грузоподъемность крана на необходимом вылете крюка должна быть не менее массы аппарата.
Рис. 6. Схема подъема аппарата одним краном методом скольжения при строповке на расстоянии 2/3 высоты аппарата (строповка согласно рис. 2, в):
1 - положение аппарата, при котором вступает в работу дотягивающая система; 2 - тормозная система; 3 - боковые расчалки; 4 - тормозная оттяжка; 5 - дотягивающая система
4.6.1. При выборе места строповки необходимо учитывать, что смещение его по образующей корпуса от вершины к центру тяжести аппарата вызывает увеличение угла отклонения от вертикали поднятого над землей аппарата и затрудняет его установку на анкерные болты фундамента. Поэтому место строповки следует располагать таким образом, чтобы при опускании аппарата на анкерные болты угол отклонения его оси от вертикали не превышал 15°.
4.6.2. Расположение места строповки аппарата на его корпусе находят следующим способом. При заданном угле отклонения оси аппарата от вертикали (например 15°) вычерчивают положение аппарата с этим углом наклона при условии, чтобы высота подъема аппарата над фундаментом была равна h = 1 м (рис. 7). Проведя вертикаль через центр тяжести аппарата, получают на образующей корпуса место строповки - точку А, удаленную от центра тяжести на расстояние d. Исходя из минимальной длины стропа, равной lc = 1 м, находят необходимую высоту подъема крюка Hк крана и по табл. 3 определяют модель крана, с помощью которого можно поднять аппарат с заданными габаритами (H и d) при строповке его на расстоянии 2/3 высоты от основания.
4.6.3. Положение центра тяжести и массу аппарата в монтажном состоянии определяют по рабочим чертежам аппарата с учетом масс и расположения обслуживающих площадок, технологических трубопроводов и изоляции. Рассчитанная таким образом масса поднимаемого аппарата должна быть увеличена на 10 %.
4.6.4. Подъем аппарата необходимо производить по приведенной ниже технологии:
а) поднять аппарат одновременной работой механизма подъема крюка крана и механизма перемещения его опорной части без отрыва низа аппарата от земли из исходного горизонтального положения в положение, близкое к вертикальному;
б) приподнять аппарат над основанием, чтобы низ его был выше верха анкерных болтов на 0,2 м; повернуть краном аппарат до положения, при котором он окажется над фундаментом;
в) опереть на фундамент нижнюю часть аппарата и закрепить ее от сдвига тормозной оттяжкой, довести аппарат до нейтрального положения с помощью дотягивающей системы;

Рис. 7. Пример выбора места строповки аппарата графическим методом
г) перевести с помощью тормозной системы аппарат из нейтрального положения в вертикальное, удерживая его от боковых смещений боковыми расчалками. После выверки и закрепления аппарата анкерными болтами снять строп.
4.7. При подъеме аппаратов спаренными кранами одинаковых или разных моделей должно быть обеспечено распределение нагрузок на каждый кран в соответствии с его грузоподъемностью, что достигается применением балансирных устройств. Если применяют спаренные краны разных грузоподъемностей, то для распределения между ними в процессе подъема нагрузок соответственно их грузоподъемностям можно использовать кроме траверс монтажные штуцеры различной длины в соответствии с ГОСТ 14114-69 - ГОСТ 14116-69. Если на кранах имеются устройства для синхронизации нагрузок, приборы, обеспечивающие такую работу кранов, должны быть предварительно проверены и включены.
Таблица 3
Максимальные параметры вертикальных аппаратов, которые могут быть подняты стреловыми кранами соответствующих типоразмеров по схеме рис. 6, а также значения усилий в подтаскивающей системе (h = 0,35 м, Z = 0,3 м)
|
Модель крана |
Длина стрелы, м |
Показатели |
||||||||
|
А, м |
R, м |
d, м |
H, м |
l, м |
P, тс |
S, тс |
||||
|
Гусеничные |
МКГ-25 |
12,5 |
11,96 |
3,8 |
1 |
16,21 |
10,81 |
25 |
3,12 |
|
|
22,5 |
20,16 |
4 |
1 |
28,51 |
19,01 |
16 |
2 |
|||
|
15,34 |
1,5 |
20,91 |
13,94 |
|||||||
|
32,5 |
31,26 |
5,0 |
1 |
45,17 |
30,11 |
10 |
1,25 |
|||
|
27,24 |
1,5 |
38,76 |
25,84 |
|||||||
|
22,62 |
2 |
31,45 |
20,97 |
|||||||
|
СКГ-30 |
15 |
12 |
5 |
1 |
16,27 |
10,85 |
30 |
3,75 |
||
|
20 |
17,3 |
6 |
1 |
24,23 |
16,15 |
20 |
2,5 |
|||
|
16,35 |
1,5 |
22,43 |
14,95 |
|||||||
|
25 |
22 |
7 |
1 |
32,27 |
20,85 |
15 |
1,9 |
|||
|
21,1 |
1,5 |
29,55 |
19,7 |
|||||||
|
20,2 |
2 |
27,83 |
18,55 |
|||||||
|
19,3 |
2,5 |
26,1 |
17,4 |
|||||||
|
СКГ-40 |
15 |
12,15 |
4,5 |
1 |
16,5 |
11 |
40 |
5 |
||
|
20 |
17,5 |
6 |
1 |
24,53 |
16,35 |
20 |
2,5 |
|||
|
16,7 |
1,5 |
22,95 |
15,3 |
|||||||
|
25 |
22,05 |
7 |
1 |
31,35 |
20,9 |
15 |
1,9 |
|||
|
21,05 |
1,5 |
29,47 |
19,65 |
|||||||
|
20,3 |
2 |
27,97 |
18,65 |
|||||||
|
СКГ-63 |
15 |
14,26 |
4,5 |
1 |
19,67 |
13,11 |
63 |
7,9 |
||
|
13,84 |
1,5 |
18,66 |
12,44 |
|||||||
|
30 |
28,06 |
6 |
1 |
40,37 |
26,91 |
35 |
4,4 |
|||
|
27,64 |
1,5 |
39,36 |
26,24 |
|||||||
|
27,22 |
2 |
38,35 |
25,57 |
|||||||
|
25,8 |
2,5 |
35,85 |
23,9 |
|||||||
|
25,83 |
3 |
35,52 |
23,68 |
|||||||
|
40 |
38,06 |
7 |
1 |
55,37 |
591 |
25 |
3,12 |
|||
|
37,64 |
1,5 |
54,36 |
36,24 |
|||||||
|
37,22 |
2 |
53,35 |
35,57 |
|||||||
|
24,5 |
2,5 |
48,9 |
32,6 |
|||||||
|
32,08 |
3 |
44,9 |
29,93 |
|||||||
|
29,86 |
3,5 |
41,19 |
27,46 |
|||||||
|
СКГ-100 |
20 |
18,76 |
6,0 |
1 |
26,27 |
17,51 |
100 |
12,5 |
||
|
18,4 |
1,5 |
25,5 |
17 |
|||||||
|
18 |
2 |
24,53 |
16,35 |
|||||||
|
40 |
36,805 |
9,5 |
1 |
53,48 |
35,65 |
30 |
3,75 |
|||
|
36,4 |
1,5 |
52,5 |
35 |
|||||||
|
36 |
2 |
51,53 |
34,35 |
|||||||
|
35,59 |
2,5 |
50,54 |
33,69 |
|||||||
|
35,19 |
3 |
49,5 |
33,04 |
|||||||
|
34,79 |
3,5 |
48,59 |
32,39 |
|||||||
|
33,58 |
4 |
46,40 |
30,93 |
|||||||
|
Пневмоколесные на временных опорах |
К-255 |
15 |
9,9 |
4,5 |
1 |
13,43 |
8,95 |
25 |
3,12 |
|
|
8,8 |
1,5 |
11,55 |
7,7 |
|||||||
|
20 |
15,3 |
5,5 |
1 |
21,23 |
14,15 |
17 |
2,1 |
|||
|
14,2 |
1,5 |
19,28 |
12,85 |
|||||||
|
25 |
20 |
6,5 |
1 |
27,28 |
18,85 |
12 |
1,5 |
|||
|
19,05 |
1,5 |
26,78 |
17,85 |
|||||||
|
18 |
2 |
24,9 |
16,6 |
|||||||
|
МКТ-40 |
15 |
14,75 |
3 |
1 |
20,93 |
13,95 |
40 |
5,0 |
||
|
25 |
24,75 |
4 |
1 |
35,92 |
23,95 |
25 |
3,12 |
|||
|
24,75 |
1,5 |
35,55 |
23,7 |
|||||||
|
22,85 |
2 |
32,33 |
21,55 |
|||||||
|
16,75 |
2,5 |
22,8 |
15,2 |
|||||||
|
35 |
34,75 |
4,5 |
1 |
50,93 |
33,95 |
13 |
1,65 |
|||
|
34,75 |
1,5 |
50,55 |
33,7 |
|||||||
|
30,6 |
2 |
43,95 |
29,3 |
|||||||
|
26,1 |
2,5 |
36,83 |
24,55 |
|||||||
В расчетах нагрузок на спаренные краны следует учитывать неравномерность расположения по периметру вертикального аппарата обвязочных трубопроводов, люков-лазов и площадок с лестницами.
4.8. При подъеме и установке вертикальных аппаратов спаренными кранами без балансирных траверс основное внимание следует уделять контролю за равномерностью подъема аппарата и за допустимым углом отклонения его оси от вертикали, определяемым, исходя из запаса грузоподъемности кранов.
До подъема вертикальных аппаратов спаренными кранами следует для обеспечения безопасного ведения работ заранее определить, исходя из запаса грузоподъемности крана, предельно допустимый угол отклонения оси аппарата от вертикали (j) и разницу отметок мест строповки (h) с учетом возможности неравномерной работы кранов (рис. 8).
В процессе подъема угол отклонения оси аппарата от вертикали определяют с помощью уровней, отвесов и транспортиров, теодолита и других приборов.
Величину дополнительной нагрузки на краны при отклонении оси аппарата от вертикали определяют по графику на рис. 9.
Пример расчета допускаемого угла отклонения оси аппарата от вертикали и разницы отметок мест строповки при неравномерной работе кранов приведен в приложении 2.
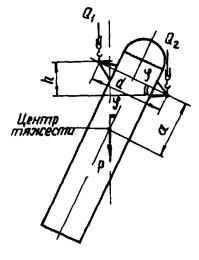
Рис. 8. Расчетная схема подъема аппарата двумя кранами
4.9. Подъем вертикального аппарата методом скольжения без передвижения спаренных кранов (рис. 10) применяется при отсутствии крана грузоподъемностью, равной массе аппарата, или с рабочим оборудованием, обеспечивающим размещение аппарата в подстреловом пространстве.
Общая грузоподъемность спаренных кранов на необходимых для монтажа вылетах крюков должна быть не менее подъемной массы аппарата.
Из указанных на рис. 3 схем наиболее проста и предпочтительна схема подъема аппарата спаренными кранами (рис. 3, з), при которой краны совершают только одну рабочую операцию - подъем крюка.
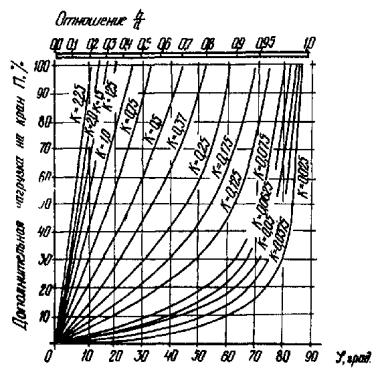
Рис. 9. График зависимости дополнительной нагрузки (%) на один из кранов от угла отклонения оси аппарата от вертикали:
a - расстояние от центра тяжести до места строповки аппарата по его оси, м; d - расстояние между местами строповки аппарата, м; h - разница отметок мест строповки при неравномерной работе кранов, м

Рис. 10. Схема подъема аппарата спаренными кранами методом скольжения (строповка согласно рис. 2, д):
1 - подтаскивающая система; 2 - тормозная оттяжка
4.9.1. Технология подъема аппарата аналогична технологии подъема аппарата одним краном со строповкой за вершину. Места строповки аппарата следует располагать по возможности ближе к центру тяжести аппарата, что способствует лучшему распределению нагрузок на краны.
Максимальные параметры вертикальных аппаратов, которые могут быть подняты данным способом с помощью стреловых кранов соответствующих типоразмеров, приведены в табл. 4.
4.10. Подъем вертикального аппарата методом скольжения с передвижением спаренных кранов (рис. 11) следует применять, когда краны невозможно установить так, чтобы поднять аппарат без их передвижения. При этом необходимо синхронизировать работу кранов при их передвижении с помощью особо четкого руководства и контроля за ходом подъема.
Рис. 11. Схема подъема аппарата спаренными кранами методом скольжения при строповке на высоте 2/3 от основания с передвижением кранов (строповка согласно рис. 2, д):
1 - подтаскивающая система; 2 - тормозная оттяжка; 3 - расчалки для удержания аппарата от раскачивания
Таблица 4
Максимальные параметры вертикальных аппаратов, которые могут быть подняты стреловыми кранами соответствующих типоразмеров по схеме рис. 10, а также значения усилий в подтаскивающей системе (h = 0,3 м, h0 = 0,65 м, Z = 2,0 м)
|
Длина стрелы, м |
Показатели |
||||||||
|
A, м |
R, м |
d, м |
H, м |
l, м |
Q, т |
P, т |
S, тс |
||
|
МКГ-25 |
12,5 |
12 |
3,8 |
Не ограничен |
17,7 |
9,35 |
25 |
45 |
1,07 |
|
22,5 |
22 |
4 |
37,7 |
19,35 |
16 |
29 |
0,41 |
||
|
32,5 |
32 |
5,0 |
57,7 |
29,35 |
10 |
18 |
0,18 |
||
|
СКГ-30 |
15 |
14,5 |
5 |
22,7 |
11,85 |
30 |
54 |
1,14 |
|
|
20 |
19,1 |
5,15 |
31,9 |
16,45 |
20 |
36 |
0,54 |
||
|
25 |
23,9 |
7,35 |
32,5 |
21,25 |
15 |
27 |
0,32 |
||
|
СКГ-40 |
15 |
14,8 |
4,5 |
23,3 |
12,15 |
40 |
72 |
1,48 |
|
|
20 |
19,7 |
6,15 |
33,1 |
17,05 |
20 |
36 |
0,53 |
||
|
25 |
23,9 |
7,35 |
41,5 |
21,25 |
15 |
27 |
0,32 |
||
|
СКГ-63 |
15 |
15 |
4,5 |
23,7 |
12,35 |
63 |
113 |
2,3 |
|
|
30 |
30 |
6 |
53,7 |
27,35 |
35 |
63 |
0,58 |
||
|
40 |
39,8 |
7 |
73,3 |
37,15 |
25 |
45 |
0,3 |
||
|
СКГ-100 |
20 |
19,5 |
6 |
32,7 |
16,85 |
100 |
180 |
2,67 |
|
|
40 |
37,5 |
9,5 |
68,7 |
34,85 |
30 |
54 |
0,4 |
||
Масса аппарата Р, поднимаемого по схеме рис. 10 спаренными кранами, дана для строповки аппарата за монтажные штуцеры. При использовании балансирных устройств масса поднимаемого аппарата с этими устройствами может быть равна суммарной грузоподъемности кранов.
В табл. 5 приведены максимальные параметры вертикальных аппаратов, которые могут быть подняты с помощью данного способа кранами соответствующих типоразмеров.
Таблица 5
Максимальные параметры вертикальных аппаратов, которые могут быть подняты стреловыми кранами соответствующих типоразмеров по схеме рис. 11, а также значения усилий в подтаскивающей системе (h = 2,0 м, h0 = 2,2 м, Z = 2,0 м)
|
Длина стрелы, м |
Показатели |
||||||||
|
A, м |
R, м |
d, м |
H, м |
l, м |
Q, т |
P, т |
S, тс |
||
|
МКГ-25 |
12,5 |
12 |
4,0 |
Не ограничен |
11,7 |
7,8 |
25 20 |
30 24 |
3,75 3 |
|
22,5 |
22 |
5,2 |
26,7 |
17,8 |
11,2 9 |
13,5 11 |
1,7 1,37 |
||
|
СКГ-30 |
15 |
14,5 |
5 |
15,45 |
10,3 |
30 24 |
42 33,5 |
5,25 4,18 |
|
|
20 |
19,1 |
6,5 |
22,35 |
14,9 |
20 16 |
28 22,4 |
3,5 2,8 |
||
|
25 |
23,9 |
7,0 |
29,55 |
19,7 |
15 12 |
21 16,8 |
2,62 2,1 |
||
|
СКГ-40 |
15 |
14,8 |
4,5 |
15,9 |
10,6 |
40 32 |
56 45 |
7 5,62 |
|
|
20 |
19,7 |
5,6 |
23,25 |
15,5 |
25 20 |
35 28 |
4,37 3,5 |
||
|
25 |
23,9 |
6,7 |
29,55 |
19,7 |
20 16 |
28 22,4 |
3,5 2,8 |
||
|
СКГ-63 |
15 |
15 |
5,0 |
16,2 |
10,8 |
63 50 |
38 70 |
11 8,7 |
|
|
25 |
24,2 |
6,5 |
30,0 |
20,0 |
40 32 |
56 45 |
7 5,6 |
||
|
30 |
30 |
7,0 |
38,7 |
25,8 |
35 28 |
49 39,2 |
6,1 4,9 |
||
|
СКГ-100 |
20 |
19,5 |
6,0 |
22,95 |
15,3 |
100 80 |
140 112 |
17,5 14,0 |
|
|
30 |
29,5 |
7,0 |
38,00 |
25,3 |
63 50,4 |
88 75,6 |
11 9,45 |
||
Примечание. В числителе даны значения масс аппаратов, грузоподъемностей кранов и усилий в подтягивающей системе при движении кранов со стрелами, расположенными вдоль гусениц, в знаменателе - со стрелами, расположенными поперек гусениц.
4.10.1. Подъем аппарата по схемам рис. 3 в, г необходимо производить по приведенной ниже технологии:
а) до нейтрального положения аппарат поднимают, не отрывая его низ от земли, одновременной работой механизмов подъема крюков и механизма, подтаскивающего аппарат за опорную часть. Из нейтрального положения в вертикальное аппарат переводят, используя оттяжку, удерживающую его низ от раскачивания;
б) приподнимают аппарат над основанием на 0,2 м выше верха анкерных болтов. Одновременным передвижением кранов располагают аппарат над фундаментом в вертикальном положении III. В процессе передвижения кранов аппарат удерживают от раскачивания оттяжками;
в) устанавливают аппарат на фундамент, выверяют и закрепляют после чего снимают стропы и оттяжки.
4.10.2. Технология подъема аппарата по схеме рис. 3, и отличается от технологии по схеме рис. 3, в тем, что аппарат предварительно размещают на земле около фундамента (положение III), а затем, приподняв на 0,2 м над верхом анкерных болтов, устанавливают его в проектное положение на фундамент поворотом или передвижением кранов.
4.11. При монтаже технологического оборудования с помощью передвигающихся под нагрузкой кранов необходимо учитывать, что краны СКГ-40, СКГ-63, СКГ-100 и МКГ-25, оборудованные стрелами без клюва, а также краны МКГ-25БР с БСО могут передвигаться с грузами. Передвижение кранов необходимо осуществлять в соответствии с ППР и соблюдая следующие требования:
а) массы грузов и вылеты крюков не должны превышать величин, указанных в табл. 6;
б) передвижение крана с грузом необходимо производить по специально подготовленному основанию, имеющему уклон не более одного градуса.
Поверхность площадки на пути передвижения крана должна быть уплотнена до состояния, при котором она выдерживает давление не менее 6 кгс/см2. Дополнительное уплотнение основания может быть достигнуто предварительным 4-5-кратным передвижением кранов без груза.
Таблица 6
Максимальные допускаемые грузоподъемности кранов при передвижении
При передвижении кранов с грузами на вылетах крюков, больших, чем указанные в табл. 6, масса грузов не должна превышать, независимо от положений стрел, половины паспортной грузоподъемности кранов на данных вылетах крюков.
Передвижение кранов, оборудованных стрелами, длина которых превышает указанную в табл. 6, а также с БСО, кроме крана МКГ-25БР (табл. 7), с любым грузом на крюке не допускается. Передвижение кранов с грузом на больших вылетах крюка не рекомендуется.
|
Длина стрелы, м |
Вылеты крюков не более, м |
Массы грузов не более, т |
||
|
стрела вдоль гусениц |
стрела поперек гусениц |
|||
|
МКГ-25 |
12,5 |
4,0 |
25 |
20 |
|
17,5 |
4,5 |
14 |
11,2 |
|
|
22,5 |
5,2 |
11,2 |
9 |
|
|
27,5 |
6 |
6,5 |
5,2 |
|
|
СКГ-40 |
15 |
4,5 |
40 |
32,0 |
|
20 |
5,6 |
25 |
20 |
|
|
25 |
6,7 |
20 |
16 |
|
|
СКГ-63А |
15 |
5,0 |
63 |
50 |
|
20 |
6,0 |
50 |
40 |
|
|
25 |
6,5 |
40 |
32 |
|
|
30 |
7 |
35 |
28 |
|
|
СКГ-100 |
20 |
6 |
100 |
80 |
|
30 |
7 |
63 |
50,4 |
|
При недостаточной несущей способности основания путь передвижения кранов с грузом максимальной массы должен быть покрыт шпальным настилом или инвентарными щитами, уложенными на песчаную подушку. Передвижение кранов с грузом по свеженасыпанному не утрамбованному грунту не разрешается. На пути кранов не должно быть посторонних предметов, которые могут вызвать дополнительные динамические нагрузки при передвижении кранов с грузом.
При одновременном передвижении спаренных кранов с поднятым над землей аппаратом, его необходимо удерживать от раскачивания оттяжками.
4.12. Передвижение крана МКГ-25БР с грузом на крюке БСО разрешается только при расположенном вдоль гусениц клюве. Грузоподъемность крана при передвижении с БСО и угол наклона основания, при котором допускается передвижение крана, указаны в табл. 7.
Передвижение крана с грузом на крюке при клюве, направленном поперек гусениц, не допускается.
Таблица 7
Значения грузоподъемности и угла наклона основания, при котором допускается передвижение крана МКГ-25БР с БСО*
*Маневровый клюв направлен вдоль гусениц. Вылет крюка минимальный.
|
Допустимый угол наклона основания, по которому передвигается кран, град. |
Допустимая масса груза, с которым передвигается кран, % от номинального груза |
||
|
стрелы (башни) |
маневрового клюва |
||
|
18,5 |
10 |
1 |
70 |
|
15 |
1 |
60 |
|
|
20 |
0,5 |
50 |
|
|
23,5 |
10 |
0,5 |
60 |
|
15 |
0,5 |
50 |
|
|
20 |
0 |
30 |
|
|
28,5 |
10 |
0 |
30 |
|
15 |
Передвижение с грузом на крюке не допускается |
||
|
20 |
|||
Б. Подъем методом поворота вокруг шарнира
4.13. Подъем вертикальных аппаратов методом поворота вокруг шарнира производят кранами, паспортная грузоподъемность которых меньше массы аппаратов.
4.14. Конструкция устанавливаемого рядом с фундаментом шарнирного устройства для подъема аппаратов кранами показана на рис. 12, а. При подъеме аппаратов диаметром до 2000 мм опоры 2 и 3 устанавливают в средние гнезда. Конструкция шарнира, устанавливаемого на приливы фундамента, показана на рис. 12, б.
4.15. При подъеме этим методом вертикальных аппаратов для их крепления к фундаментам следует применять анкерные болты разъемной конструкции с соединением на резьбовой муфте (рис. 13) или другой конструкции, не препятствующей установке нижней части аппарата на поверхность фундамента.
При установке анкерных болтов следует пользоваться кондуктором.
4.16. В зависимости от параметров крана и характеристики аппарата следует применять одну из приведенных на рис. 14 схем подъема - в один этап до нейтрального положения без дотягивания (схемы рис. 14, а, в, д, з) или в два этапа с дотягиванием (схемы рис. 14, б, г, ж, и) дополнительными средствами:
подъем аппаратов одним краном с поворотом стрелы и изменением вылета крюка (рис. 14, а, б);
подъем аппарата одним краном с передвижением его по мере подъема аппарата (рис. 14, в, г);
подъем аппарата спаренными кранами с поворотом стрел и изменением вылета крюков (рис. 14, д, ж);
подъем аппарата спаренными кранами с передвижением их по мере подъема аппарата (рис. 14, з, и).
4.17. Подъем аппарата в один этап производят следующим образом: кранами поднимают аппарат до нейтрального положения (когда центр тяжести расположен на одной вертикали с осью поворотного шарнира аппарата). После этого аппарат опускают в проектное положение, используя тормозную расчалку, закрепленную за его верх.
4.18. Поднимать аппарат в два этапа (первый этап - подъем аппарата кранами на угол 50-60° и второй этап - дотягивание аппарата лебедкой или трактором через полиспаст до нейтрального положения) следует в случае, если его подъем кранами из горизонтального положения в нейтральное невозможен. Дотягивающую систему необходимо располагать в плоскости подъема аппарата и в процессе подъема ее следует периодически подтягивать.
Рис. 12. Шарнирное устройство:
а - конструкции ОКБ ВНИИМонтажспецстроя для подъема вертикальных аппаратов массой до 100 т: 1 - нижняя опора; 2 - левая опора; 3 - правая опора; 4 - ось; б - устанавливаемое на приливе фундамента
4.19. Расчетные нагрузки на дотягивающую систему ST для положения аппарата, поднятого на предельный угол, определяют исходя из грузовысотных характеристик крана графическим (рис. 15, а) или графоаналитическим методами (рис. 15, б); ST определяется по формуле
ST = ![]() , тс.
, тс.
4.20. При подходе аппарата к нейтральному положению следует вбирать слабину тормозной оттяжки, расположенной в плоскости аппарата, и при дальнейшем движении аппарата постепенно отпускать оттяжку.
Рис. 13. Составные анкерные болты (типовая конструкция по ОCT 26-03) для крепления аппаратов на низких фундаментах:
1 - муфта; 2 - отъемная часть болта

Рис. 14. Основные схемы подъема вертикальных аппаратов кранами методом поворота вокруг шарнира

Рис. 15. Определение нагрузки на систему, дотягивающую аппарат:
а - графическим методом; б - графоаналитическим методом
Для обеспечения расположения аппарата в плоскости подъема в процессе монтажа следует применять две боковые расчалки, закрепленные за тракторы или лебедки, установленные на якорях.
4.21. Максимальные расчетные нагрузки (Smax) на крюки кранов в процессе подъема аппарата из исходного горизонтального в проектное вертикальное положение определяют (в зависимости от расположения мест строповки по высоте аппарата и схемы строповки) по формулам, приведенным на рис. 16.
Максимальные нагрузки на крюки кранов возникают в момент отрыва аппарата от земли (при j = 0°) для всех рассмотренных на рис. 16 случаев строповки аппарата, кроме последнего, при К<2. В этом случае нагрузки на кран в процессе подъема возрастают и их значения следует определять из графика зависимости нагрузки на кран от угла подъема аппарата Q = f(j) (рис. 17). Для построения графика нагрузку определяют по формуле
![]() , тс,
, тс,
где l - расстояние от опоры аппарата до центра тяжести, м;
D - диаметр аппарата, м;
![]()
L - расстояние от опоры аппарата до места cтроповки, м,

Рис. 16. Определение максимальных нагрузок на крюк крана в зависимости от места расположения узла строповки при подъеме вертикального аппарата методом поворота вокруг шарнира
Рис. 17. Зависимость нагрузки на кран при L = 1,5l и строповке за верхнюю образующую аппарата
Места строповки следует располагать возможно ближе к вершине аппарата. Не следует размещать их на верхней образующей аппарата, если расстояние от его опоры до места строповки меньше удвоенного расстояния от опоры аппарата до его центра тяжести (К<2). При подъеме методом поворота вокруг шарнира и К<2 аппарат следует стропить либо по нижней образующей, либо по оси.
4.22. Подъем вертикального аппарата методом поворота вокруг шарнира одним краном со строповкой за вершину (рис. 18) следует применять преимущественно, если высота аппарата меньше допускаемой высоты подъема крюка, когда размеры рабочего оборудования крана обеспечивают в процессе монтажа размещение аппарата в подстреловой зоне. Грузоподъемность крана на максимальном вылете крюка не должна быть меньше 50 % массы аппарата при расположении его центра тяжести посередине.
Рис. 18. Схема подъема аппарата одним краном методом поворота при строповке за вершину (строповка согласно рис. 2, в):
1 - положение аппарата, при котором в работу включается дотягивающая система; 2 - тормозная оттяжка; 3 - боковые расчалки
В табл. 8 приведены максимальные параметры вертикальных аппаратов, которые могут быть подняты кранами (рис. 18).
Подъем аппарата необходимо производить по приведенной ниже технологии. Из исходного горизонтального положения в нейтральное аппарат поднимают периодической работой механизмов подъема и изменения вылета крюка с одновременным поворотом платформы, при этом отклонение грузового полиспаста крана от вертикали должно находиться в пределах, указанных в табл. 1.
Таблица 8
Максимальные параметры вертикальных аппаратов, которые могут быть подняты стреловыми кранами соответствующих типоразмеров по схеме рис. 18, а также значения усилий в дотягивающей системе (h = 0,2 м, Z = 0,3 м, j = 50°, a = 20°)
|
Модель крана |
Длина стрелы, м |
Показатели |
|||||||||
|
A, м |
d, м |
Rmin, м |
Rmax, м |
l, м |
H, м |
Q, т |
P, т |
S, тс |
|||
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
12 |
|
Гусеничные |
МКГ-25 |
12,5 |
11,96 |
1 |
3,8 |
4,9 |
14,6 |
15,1 |
18 |
36 |
28 |
|
9,19 |
1,5 |
4,6 |
10,65 |
11,1 |
21 |
42 |
27 |
||||
|
6,52 |
2 |
4,5 |
6,9 |
7,4 |
|||||||
|
22,5 |
20,16 |
1 |
4 |
6,8 |
25 |
25,7 |
12 |
24 |
16 |
||
|
15,34 |
1,5 |
5,7 |
19,15 |
19,6 |
13 |
26 |
17 |
||||
|
11,32 |
2 |
5,15 |
13,1 |
13,6 |
16 |
32 |
21 |
||||
|
7,6 |
2,5 |
4,7 |
7,9 |
8,4 |
|||||||
|
32,5 |
31,28 |
1 |
5 |
8,8 |
39,7 |
40,2 |
6 |
14 |
9 |
||
|
27,24 |
1,5 |
8,2 |
34,2 |
34,5 |
7 |
15 |
10 |
||||
|
22,62 |
2 |
7,4 |
27,85 |
28,3 |
9 |
18 |
12 |
||||
|
17,85 |
2,5 |
6,65 |
21,8 |
21,8 |
10 |
20 |
13 |
||||
|
18,58 |
3 |
6,05 |
15,5 |
16,0 |
|||||||
|
9,31 |
8,5 |
5,45 |
9,5 |
10,0 |
|||||||
|
СКГ-30 |
15 |
12 |
1 |
5 |
5,85 |
14,1 |
14,6 |
27,5 |
55 |
37 |
|
|
10,9 |
1,5 |
5,75 |
12,8 |
12,8 |
27,5 |
||||||
|
10 |
2 |
5,7 |
10,6 |
11,1 |
28 |
56 |
38 |
||||
|
9,2 |
2,5 |
5,7 |
9,8 |
9,8 |
28 |
||||||
|
8,55 |
3 |
|
5,65 |
8 |
8,5 |
28 |
|
|
|||
|
7,65 |
3,5 |
5,65 |
6,6 |
7,2 |
28 |
||||||
|
6,8 |
4 |
|
5,6 |
5,1 |
5,6 |
29 |
58 |
39 |
|||
|
17,3 |
1 |
7,6 |
21,35 |
21,8 |
19 |
38 |
24 |
||||
|
20 |
16,35 |
1,5 |
6,15 |
7,4 |
19,6 |
20,1 |
20 |
40 |
26 |
||
|
15,2 |
2 |
7,3 |
17,85 |
18,3 |
20 |
||||||
|
14,35 |
2,5 |
7,25 |
16,3 |
16,8 |
20 |
||||||
|
13,5 |
3 |
7,25 |
14,75 |
14,2 |
20 |
||||||
|
12,7 |
3,5 |
7,2 |
13,1 |
13,6 |
20 |
||||||
|
11,9 |
4 |
7,15 |
11,7 |
12,2 |
20 |
||||||
|
25 |
22 |
1 |
7,85 |
9,1 |
27,4 |
27,9 |
14 |
28 |
18 |
||
|
21 |
1,5 |
9,05 |
25,7 |
26,2 |
|||||||
|
20,2 |
2 |
8,95 |
24 |
24,5 |
|||||||
|
19,8 |
2,5 |
8,9 |
22,5 |
28,0 |
|||||||
|
18,4 |
3 |
8,85 |
21 |
21,5 |
15 |
30 |
20 |
||||
|
17,45 |
3,5 |
8,8 |
19,3 |
19,8 |
|||||||
|
16,8 |
4 |
8,75 |
17,8 |
18,3 |
|||||||
|
СКГ-40 |
15 |
12,15 |
1 |
4,5 |
5,45 |
14,45 |
14,9 |
30 |
60 |
40 |
|
|
11 |
1,5 |
5,35 |
12,5 |
13,0 |
32 |
64 |
43 |
||||
|
10,15 |
2 |
5,25 |
10,9 |
11,4 |
|||||||
|
9,3 |
2,5 |
5,25 |
9,35 |
9,8 |
|||||||
|
8,5 |
3 |
5,20 |
8 |
8,5 |
33 |
66 |
44 |
||||
|
7,7 |
3,5 |
5,20 |
6,5 |
7,0 |
|||||||
|
6,85 |
4 |
5,15 |
5 |
5,5 |
|||||||
|
20 |
17,5 |
1 |
6,15 |
7,45 |
19,8 |
21,3 |
20 |
40 |
26 |
||
|
16,7 |
1,5 |
7,4 |
19,0 |
19,5 |
|||||||
|
15,7 |
2 |
7,35 |
17,2 |
17,7 |
|||||||
|
14,9 |
2,5 |
7,3 |
16,5 |
17,0 |
|||||||
|
14,1 |
3 |
7,3 |
15,3 |
15,8 |
|||||||
|
13,25 |
3,5 |
7,25 |
13,5 |
13,8 |
|||||||
|
12,4 |
4 |
7,2 |
11,8 |
12,3 |
|||||||
|
25 |
22,05 |
1 |
7,35 |
9 |
27,8 |
27,8 |
14 |
28 |
38 |
||
|
21,05 |
1,5 |
8,95 |
25,6 |
26,1 |
|||||||
|
20,3 |
2 |
8,9 |
24,15 |
24,6 |
15 |
30 |
40 |
||||
|
19,5 |
2,5 |
8,9 |
22,7 |
23,2 |
|||||||
|
18,55 |
3 |
8,85 |
21,1 |
21,6 |
|||||||
|
17,75 |
3,5 |
8,8 |
19,7 |
20,2 |
|||||||
|
16,9 |
4 |
8,75 |
18,1 |
18,6 |
|||||||
|
СКГ-63 |
15 |
14,26 |
1 |
4,5 |
5,7 |
18,2 |
18,7 |
55 |
110 |
76 |
|
|
13,84 |
1,5 |
5,75 |
17,1 |
17,6 |
53 |
106 |
73 |
||||
|
13,42 |
2 |
5,85 |
16,4 |
16,9 |
52 |
104 |
72 |
||||
|
13 |
2,5 |
6,95 |
15,6 |
16,1 |
50 |
100 |
69 |
||||
|
12,03 |
3 |
5,85 |
13,25 |
13,7 |
52 |
104 |
72 |
||||
|
10,66 |
3,5 |
5,7 |
11,15 |
11,6 |
55 |
110 |
76 |
||||
|
9,29 |
4 |
5,6 |
8,9 |
9,4 |
56 |
112 |
78 |
||||
|
30 |
28,06 |
1 |
6 |
9,05 |
35,6 |
36,1 |
25 |
50 |
35 |
||
|
27,64 |
1,5 |
9,1 |
34,6 |
35,1 |
|||||||
|
27,22 |
2 |
9,2 |
33,8 |
34,3 |
|||||||
|
25,8 |
2,5 |
9,1 |
33 |
33,5 |
|||||||
|
25,83 |
3 |
9,05 |
31,5 |
32,0 |
26 |
52 |
36 |
||||
|
23,91 |
3,5 |
8,85 |
28,7 |
29,2 |
|||||||
|
22,14 |
4 |
8,6 |
25,9 |
26,4 |
|||||||
|
40 |
38,06 |
1 |
7 |
11,5 |
48,7 |
49,2 |
16,5 |
33 |
22 |
||
|
37,64 |
1,5 |
11,5 |
47,7 |
48,2 |
|||||||
|
37,22 |
2 |
11,5 |
46,7 |
47,2 |
|||||||
|
34,5 |
2,5 |
11,2 |
43,3 |
43,8 |
17 |
34 |
23 |
||||
|
32,08 |
3 |
10,8 |
39,8 |
40,3 |
|||||||
|
29,86 |
3,5 |
10,55 |
36,3 |
36,8 |
19 |
38 |
26 |
||||
|
27,59 |
4 |
10,2 |
33,1 |
33,6 |
|||||||
|
СКГ-100 |
20 |
18,76 |
1 |
6 |
7,65 |
23,3 |
23,8 |
68 |
136 |
90 |
|
|
18,4 |
1,5 |
7,7 |
22,35 |
22,8 |
|||||||
|
18 |
2 |
7,7 |
21,5 |
22,10 |
|||||||
|
17,60 |
2,5 |
7,7 |
20,7 |
21,2 |
|||||||
|
16,64 |
3 |
7,65 |
19 |
19,5 |
|||||||
|
18,59 |
3,5 |
7,5 |
16,8 |
17,3 |
|||||||
|
13,38 |
4 |
7,35 |
14 |
14,5 |
|||||||
|
40 |
36,81 |
1 |
9,5 |
13,15 |
47,4 |
47,9 |
28 |
56 |
38 |
||
|
36,4 |
1,5 |
13,15 |
46,5 |
47,0 |
|||||||
|
36 |
2 |
13,1 |
45,6 |
46,1 |
|||||||
|
35,59 |
2,5 |
13,1 |
44,7 |
45,2 |
|||||||
|
35,19 |
3 |
13,1 |
43,8 |
44,3 |
|||||||
|
34,79 |
3,5 |
13 |
42,9 |
48,4 |
|||||||
|
33,58 |
4 |
13 |
41,2 |
41,7 |
|||||||
|
Пневмоколесные на временных опорах |
К-255 |
15 |
9,9 |
1 |
4,5 |
5,15 |
11,75 |
12,25 |
19,9 |
39 |
19 |
|
8,8 |
1,5 |
5,05 |
9,95 |
10,45 |
20,7 |
41 |
18 |
||||
|
7,65 |
2 |
5 |
8 |
8,05 |
21,1 |
42 |
13 |
||||
|
6,65 |
2,5 |
4,95 |
6,3 |
6,8 |
21,5 |
43 |
10 |
||||
|
20 |
15,3 |
1 |
5,5 |
6,6 |
18,6 |
19,1 |
12,9 |
25 |
14 |
||
|
14,2 |
1,5 |
6,55 |
16,8 |
17,3 |
13,1 |
26 |
14 |
||||
|
13,1 |
2 |
6,5 |
14,8 |
15,3 |
13,3 |
26 |
13 |
||||
|
12 |
2,5 |
6,45 |
13 |
13,5 |
13,5 |
|
11 |
||||
|
10,8 |
3 |
6,4 |
10,95 |
11,45 |
13,8 |
27 |
9 |
||||
|
9,75 |
3,5 |
6,35 |
9,25 |
9,75 |
13,8 |
|
6 |
||||
|
8,65 |
4 |
6,25 |
7,4 |
7,9 |
14,2 |
28 |
4 |
||||
|
25 |
20 |
1 |
6,5 |
8,1 |
24,9 |
25,4 |
8,8 |
17 |
10 |
||
|
19,05 |
1,5 |
8,0 |
23,05 |
23,55 |
8,3 |
17 |
9 |
||||
|
18 |
2 |
8 |
21,3 |
21,8 |
9 |
|
8 |
||||
|
16,85 |
2,5 |
7,9 |
19,35 |
19,85 |
9,2 |
18 |
8 |
||||
|
15,55 |
3 |
7,8 |
17,2 |
17,7 |
9,4 |
|
7 |
||||
|
14,4 |
3,5 |
7,7 |
15,2 |
15,7 |
9,6 |
19 |
6 |
||||
|
13,4 |
4 |
7,65 |
13,65 |
14,15 |
9,7 |
19 |
6 |
||||
|
МКТ-40 |
15 |
14,75 |
1 |
3 |
4,74 |
17,65 |
18,15 |
35 |
70 |
46 |
|
|
11,15 |
1,5 |
3 |
4,21 |
12,6 |
13,1 |
40 |
80 |
52 |
|||
|
25 |
24,75 |
1 |
|
7,25 |
29,7 |
30,2 |
13,5 |
27 |
17 |
||
|
24,75 |
1,5 |
4 |
7,38 |
29,65 |
30,15 |
13 |
26 |
||||
|
22,85 |
2 |
|
7,1 |
27,3 |
27,8 |
14 |
28 |
18 |
|||
|
16,75 |
2,5 |
|
6,1 |
19 |
19,5 |
18 |
36 |
23 |
|||
|
11,75 |
3 |
5 |
5,27 |
12,2 |
12,7 |
22 |
44 |
28 |
|||
|
35 |
34,75 |
1 |
|
9,5 |
44,5 |
45,0 |
7,5 |
15 |
10 |
||
|
34,75 |
1,5 |
|
9,6 |
43,6 |
44,1 |
7,5 |
15 |
|
|||
|
30,6 |
2 |
4,5 |
8,9 |
38,1 |
38,6 |
8,5 |
17 |
11 |
|||
|
26,1 |
2,5 |
8 |
31,15 |
31,69 |
10 |
20 |
13 |
||||
|
21,1 |
3 |
7,26 |
24,2 |
24,7 |
11,5 |
23 |
15 |
||||
|
16,4 |
3,5 |
|
6,45 |
17,7 |
18,2 |
13 |
26 |
17 |
|||
|
11,2 |
4 |
|
5,75 |
10,5 |
11,0 |
13 |
26 |
|
|||
При подъеме в два этапа аппарата, высота которого исключает возможность размещения его в подстреловом пространстве, в положении, близком к вертикальному, аппарат следует поднять краном на максимально возможный угол (50-60°), периодически подтягивая и выбирая слабину дотягивающей системы (канат или полиспаст). После того, как аппарат поднят краном на максимальный угол, натяжением дотягивающей системы снимают нагрузку с крана. Затем после проверки состояния якоря дотягивающей системы отцепляют крюк крана от аппарата. До нейтрального положения аппарат доводят дотягивающей системой. В период работы дотягивающей системы обязательно удерживать аппарат в плоскости подъема с помощью боковых расчалок.
После прохождения нейтрального положения аппарат опускают в проектное положение, натягивая тормозную оттяжку и удерживая аппарат в плоскости подъема с помощью двух боковых расчалок. Якори расчалок располагают в плоскости, проходящей по продольной оси шарнира на одинаковом расстоянии от него. Нагрузки в расчалках контролируют с помощью динамометров, установленных в узлах крепления расчалок к якорям.
4.23. Схема подъема аппарата, застропленного на расстоянии 2/3 его высоты, показана на рис. 19. Технология подъема по этой схеме аналогична описанной для рис. 18. Максимальные параметры аппаратов, которые могут быть подняты кранами по схеме, приведенной на рис. 19, указаны в табл. 9.
Рис. 19. Схема подъем аппарата одним краном методом поворота при строповке на расстоянии 2/3 высоты аппарата (строповка согласно рис. 2, в):
1 - положение аппарата, при котором в работу включается дотягивающая система; 2 - тормозная оттяжка; 3 - боковые расчалки
Таблица 9
Максимальные параметры вертикальных аппаратов, которые могут быть подняты стреловыми кранами соответствующих типоразмеров по схеме рис. 19, а также значения усилий в дотягивающей системе (h = 0,2 м, Z = 0,3 м, j = 50°, a = 20°)
|
Модель крана |
Длина стрелы, м |
Показатели |
||||||||||
|
A, м |
d, м |
Rmin, м |
Rmax, м |
l, м |
H, м |
Q, т |
P, т |
S, тс |
||||
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
12 |
|
|
Гусеничные |
МКГ-25 |
12,5 |
11,96 |
1 |
3,8 |
4,9 |
14,6 |
21,9 |
18 |
23 |
19 |
|
|
9,19 |
1,5 |
|
4,6 |
10,65 |
15,98 |
21 |
26 |
18 |
||||
|
6,52 |
2 |
4,5 |
6,9 |
10,35 |
25 |
13 |
||||||
|
22,5 |
20,16 |
1 |
4 |
6,8 |
25 |
37,8 |
12 |
15,7 |
14 |
|||
|
15,34 |
1,5 |
5,7 |
19,15 |
28,73 |
13 |
16,7 |
14 |
|||||
|
11,32 |
2 |
5,15 |
13,1 |
19,65 |
16 |
20 |
14 |
|||||
|
7,6 |
2,5 |
4,7 |
7,9 |
11,85 |
17,5 |
13 |
||||||
|
32,5 |
31,28 |
1 |
5 |
8,8 |
39,7 |
59,55 |
6 |
8 |
7 |
|||
|
27,24 |
1,5 |
8,2 |
34,2 |
51,3 |
7 |
9 |
8 |
|||||
|
22,62 |
2 |
7,4 |
27,85 |
41,78 |
9 |
13 |
11 |
|||||
|
17,85 |
2,5 |
6,65 |
21,8 |
31,95 |
10 |
12,6 |
9 |
|||||
|
13,58 |
3 |
6,05 |
15,5 |
23,25 |
12 |
7 |
||||||
|
9,31 |
8,5 |
5,45 |
9,5 |
14,25 |
10 |
4 |
||||||
|
СКГ-30 |
15 |
12 |
1 |
5 |
5,85 |
14,1 |
21,15 |
27,5 |
35 |
28 |
||
|
10,9 |
1,5 |
5,75 |
12,8 |
18,45 |
35 |
25 |
||||||
|
10 |
2 |
5,7 |
10,6 |
15,9 |
28 |
34 |
20 |
|||||
|
9,2 |
2,5 |
5,7 |
9,8 |
13,95 |
32 |
17 |
||||||
|
8,55 |
3 |
5,65 |
8 |
12 |
29 |
13 |
||||||
|
20 |
17,3 |
1 |
6,15 |
7,5 |
21,35 |
32,03 |
19 |
25 |
21 |
|||
|
16,35 |
1,5 |
7,4 |
19,6 |
29,4 |
20 |
26 |
20 |
|||||
|
15,2 |
2 |
7,3 |
17,85 |
26,77 |
52 |
26 |
19 |
|||||
|
14,35 |
2,5 |
7,25 |
16,3 |
24,45 |
50 |
25 |
17 |
|||||
|
13,5 |
3 |
7,25 |
14,75 |
22,13 |
52 |
24 |
14 |
|||||
|
12,7 |
3,5 |
7,2 |
13,1 |
19,65 |
55 |
23 |
12 |
|||||
|
25 |
22 |
1 |
7,35 |
9,1 |
27,4 |
41,1 |
14 |
18,4 |
16 |
|||
|
21,1 |
1,5 |
9,05 |
25,7 |
38,55 |
18 |
15 |
||||||
|
20,2 |
2 |
8,95 |
24 |
36 |
18 |
15 |
||||||
|
19,3 |
2,5 |
8,9 |
22,5 |
33,75 |
17,8 |
13 |
||||||
|
18,4 |
3 |
8,85 |
21 |
31,5 |
15 |
18,9 |
13 |
|||||
|
17,45 |
3,5 |
8,8 |
19,3 |
28,95 |
19 |
12 |
||||||
|
16,6 |
4 |
8,75 |
17,8 |
26,7 |
18 |
10 |
||||||
|
|
СКГ-40 |
15 |
12,15 |
1 |
4,5 |
5,45 |
14,45 |
21,67 |
30 |
39 |
32 |
|
|
11 |
1,5 |
5,35 |
12,5 |
18,75 |
32 |
40 |
29 |
|||||
|
10,15 |
2 |
5,25 |
10,9 |
16,35 |
38,5 |
24 |
||||||
|
9,3 |
2,5 |
5,25 |
9,35 |
14,03 |
37 |
20 |
||||||
|
8,55 |
3 |
5,2 |
8 |
12 |
33 |
34,5 |
15 |
|||||
|
20 |
17,5 |
1 |
6,15 |
7,45 |
21,5 |
32,25 |
20 |
26 |
17 |
|||
|
16,7 |
1,5 |
7,4 |
19,9 |
29,85 |
26 |
27 |
||||||
|
15,7 |
2 |
7,35 |
18,2 |
27,3 |
25 |
18 |
||||||
|
14,9 |
2,5 |
7,3 |
16,7 |
25,05 |
25 |
17 |
||||||
|
14,1 |
3 |
7,3 |
15,15 |
22,73 |
24 |
14 |
||||||
|
13,25 |
3,5 |
7,25 |
13,8 |
20,7 |
23 |
13 |
||||||
|
12,4 |
4 |
7,2 |
12,25 |
18,38 |
22 |
12 |
||||||
|
25 |
22,05 |
1 |
7,35 |
9 |
27,3 |
40,95 |
14 |
18,2 |
17 |
|||
|
21,05 |
1,5 |
8,95 |
25,5 |
38,4 |
|
18 |
15 |
|||||
|
20,3 |
2 |
8,9 |
24,15 |
36,22 |
|
19 |
15 |
|||||
|
19,5 |
2,5 |
8,9 |
22,7 |
34,05 |
15 |
19 |
14 |
|||||
|
18,55 |
3 |
8,85 |
21,1 |
31,65 |
|
18,5 |
13 |
|||||
|
17,75 |
3,5 |
8,8 |
19,7 |
29,55 |
|
18,5 |
12 |
|||||
|
16,9 |
4 |
8,75 |
18,1 |
27,15 |
|
18 |
11 |
|||||
|
СКГ-63 |
15 |
14,26 |
1 |
4,5 |
5,7 |
18,2 |
27,3 |
55 |
71 |
58 |
||
|
13,84 |
1,5 |
5,75 |
17,1 |
25,65 |
53 |
68 |
51 |
|||||
|
13,42 |
2 |
7,85 |
16,4 |
24,6 |
52 |
65 |
46 |
|||||
|
13 |
2,5 |
5,95 |
15,6 |
23,4 |
50 |
78 |
43 |
|||||
|
10,03 |
3 |
5,85 |
13,25 |
19,87 |
52 |
60 |
35 |
|||||
|
10,66 |
3,5 |
5,7 |
11,15 |
16,72 |
55 |
58 |
27 |
|||||
|
30 |
28,06 |
1 |
6 |
9,05 |
35,6 |
53,4 |
25 |
33 |
30 |
|||
|
27,64 |
1,5 |
9,1 |
34,6 |
51,85 |
28 |
|||||||
|
27,22 |
2 |
9,2 |
33,8 |
50,7 |
27 |
|||||||
|
25,8 |
2,5 |
9,1 |
33 |
49,5 |
26 |
|||||||
|
25,83 |
3 |
9,05 |
31,5 |
47,25 |
26 |
33 |
25 |
|||||
|
23,91 |
3,5 |
8,85 |
28,7 |
43,05 |
25 |
|||||||
|
22,14 |
4 |
8,6 |
25,9 |
33,85 |
23 |
|||||||
|
40 |
38,06 |
1 |
7 |
11,5 |
48,7 |
73,05 |
16,5 |
22 |
20 |
|||
|
37,64 |
1,5 |
11,5 |
47,7 |
71,55 |
24 |
21 |
||||||
|
37,22 |
2 |
11,5 |
46,7 |
70,05 |
22 |
19 |
||||||
|
34,5 |
2,5 |
11,2 |
43,3 |
64,95 |
17 |
24 |
20 |
|||||
|
32,08 |
3 |
10,8 |
39,8 |
58,7 |
|
19 |
||||||
|
29,86 |
3,5 |
10,55 |
36,3 |
54,45 |
19 |
18 |
||||||
|
27,59 |
4 |
10,2 |
33,1 |
49,65 |
|
17 |
||||||
|
СКГ-100 |
20 |
18,76 |
1 |
6 |
7,65 |
23,3 |
34,95 |
68 |
90 |
76 |
||
|
18,4 |
1,5 |
7,7 |
22,35 |
33,58 |
88 |
70 |
||||||
|
18 |
2 |
21,5 |
32,25 |
87 |
66 |
|||||||
|
17,60 |
2,5 |
20,7 |
31,05 |
85 |
60 |
|||||||
|
16,64 |
3 |
7,65 |
19 |
28,5 |
84 |
55 |
||||||
|
14,59 |
3,5 |
7,5 |
16,8 |
25,2 |
82 |
47 |
||||||
|
13,38 |
4 |
7,35 |
14 |
21 |
77 |
38 |
||||||
|
40 |
36,81 |
1 |
9,5 |
13,15 |
47,4 |
71,1 |
28 |
37 |
33 |
|||
|
36,4 |
1,5 |
13,15 |
46,5 |
69,75 |
32 |
|||||||
|
36 |
2 |
13,10 |
45,6 |
68,4 |
31 |
|||||||
|
35,59 |
2,5 |
13,10 |
44,7 |
67,05 |
30 |
|||||||
|
35,19 |
3 |
13,10 |
43,8 |
65,7 |
36 |
29 |
||||||
|
34,79 |
3,5 |
13 |
42,9 |
64,35 |
28 |
|||||||
|
33,58 |
4 |
13 |
41,2 |
61,8 |
27 |
|||||||
|
Пневмоколесные на временных опорах |
К-255 |
15 |
9,9 |
1 |
4,5 |
5,15 |
17,62 |
11,75 |
19,9 |
26 |
21 |
|
|
8,8 |
1,5 |
5,05 |
14,92 |
9,95 |
20,7 |
27 |
20 |
|||||
|
7,65 |
2 |
5 |
12 |
8 |
21,1 |
28 |
16 |
|||||
|
6,65 |
2,5 |
4,95 |
9,45 |
6,3 |
21,5 |
28 |
12 |
|||||
|
20 |
15,3 |
1 |
5,5 |
6,6 |
27,9 |
18,6 |
12,9 |
17 |
16 |
|||
|
14,2 |
1,5 |
6,55 |
25,2 |
16,8 |
13,1 |
14 |
||||||
|
13,1 |
2 |
6,5 |
22,2 |
14,8 |
13,3 |
13 |
||||||
|
12 |
2,5 |
6,45 |
19,5 |
13 |
13,5 |
18 |
12 |
|||||
|
10,8 |
3 |
6,4 |
16,42 |
10,95 |
13,8 |
10 |
||||||
|
9,75 |
3,5 |
6,35 |
13,92 |
9,25 |
13,8 |
8 |
||||||
|
8,65 |
4 |
6,25 |
11,1 |
7,4 |
14,2 |
19 |
6 |
|||||
|
25 |
20 |
1 |
6,5 |
8,10 |
36,9 |
24,6 |
8,8 |
11 |
11 |
|||
|
19,05 |
1,5 |
8,05 |
34,57 |
23,05 |
8,9 |
11 |
10 |
|||||
|
18 |
2 |
8 |
31,95 |
21,3 |
9 |
|
9 |
|||||
|
16,85 |
2,5 |
7,9 |
29,02 |
19,35 |
9,2 |
12 |
9 |
|||||
|
15,55 |
3 |
7,8 |
25,8 |
17,2 |
9,4 |
|
8 |
|||||
|
14,4 |
3,5 |
7,7 |
22,8 |
15,2 |
9,6 |
12 |
8 |
|||||
|
13,4 |
4 |
7,65 |
20,47 |
13,65 |
9,7 |
|
7 |
|||||
|
МКТ-40 |
15 |
14,75 |
1 |
3 |
4,74 |
26,475 |
17,65 |
35 |
46 |
39 |
||
|
11,15 |
1,5 |
4,21 |
18,9 |
12,6 |
40 |
50,5 |
36 |
|||||
|
25 |
24,75 |
1 |
4 |
7,25 |
44,55 |
29,7 |
13,5 |
17,2 |
16 |
|||
|
24,75 |
1,5 |
7,38 |
44,47 |
29,65 |
13 |
17 |
15 |
|||||
|
22,85 |
2 |
7,1 |
40,95 |
27,3 |
14 |
18 |
14 |
|||||
|
16,75 |
2,5 |
6,1 |
28,5 |
19 |
18 |
22,5 |
15,5 |
|||||
|
11,75 |
3 |
5,27 |
18,3 |
12,2 |
22 |
25,8 |
14 |
|||||
|
35 |
34,75 |
1 |
4,5 |
9,5 |
66,75 |
44,5 |
7,5 |
10 |
9 |
|||
|
34,75 |
1,5 |
9,6 |
65,4 |
43,6 |
7,5 |
10 |
8,5 |
|||||
|
30,6 |
2 |
8,9 |
57,15 |
38,1 |
8,5 |
11 |
9 |
|||||
|
26,1 |
2,5 |
8 |
46,72 |
31,15 |
10 |
13 |
10,5 |
|||||
|
21,1 |
3 |
7,26 |
36,3 |
24,2 |
11,5 |
14,5 |
10,5 |
|||||
|
16,4 |
3,5 |
6,45 |
26,55 |
17,7 |
13 |
15,8 |
9,5 |
|||||
|
11,2 |
4 |
5,75 |
15,75 |
10,5 |
13 |
21,3 |
8,5 |
|||||
4.24. Подъем вертикального аппарата методом поворота вокруг шарнира (строповка за вершину) одним краном с передвижением (рис. 14, в, г).
Способ следует применять для подъема аппарата, если он при изменении вылета крюка не размещается в подстреловой зоне или если подъем с изменением вылета крюка невозможен из-за недостаточной грузоподъемности крана.
Подъем по схеме рис. 14, в, г осуществляют попеременной работой механизма подъема крюка и передвижением крана параллельно плоскости подъема аппарата с постоянным вылетом крюка.
Если грузовысотные характеристики кранов позволяют использовать для монтажа аппаратов поворот платформы и изменение вылета крюка с передвижением крана, подъем аппарата по схеме рис. 14, г до нейтрального положения или до максимально возможного по грузовым параметрам кранов угла следует производить попеременной работой механизмов подъема груза и передвижением кранов с поворотом платформы.
Последующую установку аппарата в вертикальное положение осуществляют аналогично п. 4.22.
4.25. Подъем вертикального аппарата методом поворота вокруг шарнира двумя кранами без передвижения со строповкой за вершину (рис. 14, д, ж, рис. 20) и на расстоянии 2/3 высоты аппарата (рис. 21) применяют для аппаратов большого диаметра при наличии кранов суммарная паспортная грузоподъемность которых меньше массы аппарата.
В табл. 10 и 11 приведены максимальные параметры вертикальных аппаратов, которые могут быть подняты стреловыми кранами по схемам, показанным соответственно на рис. 20 и 21.
Технология подъема аппарата по схемам рис. 14, д, ж аналогична технологии монтажа аппаратов по схеме рис. 18.
4.26. Подъем вертикального аппарата методом поворота вокруг шарнира двумя кранами с передвижением со строповкой за вершину (рис. 14 и, з) следует применять для аппаратов больших диаметра и высоты, когда подъем аппарата, до нейтрального положения с одной стоянки крана невозможен.

Рис. 20. Схема подъема аппарата спаренными кранами методом подхвата с подхватом снизу за вершину:
1 - положение аппарата в момент включения дотягивающей системы; 2 - тормозная оттяжка; 3 - боковые расчалки
Рис. 21. Схема подъема аппарата спаренными кранами методом поворота с подхватом снизу на расстоянии 2/3 высоты аппарата:
1 - положение аппарата, при котором в работу включается дотягивающая система; 2 - тормозная оттяжка; 3 - боковые расчалки; 4 - траверса с шаровой опорой
В. Подъем аппаратов кранами с расчаленными стрелами
4.27. Гусеничные краны с временно расчаленными стрелами используют для монтажа оборудования, масса которого превышает их паспортную грузоподъемность. Этот режим может быть применен, если можно разместить необходимые расчалки.
4.28. Краны с неманевренными расчаленными стрелами следует применять при монтаже технологического оборудования на низкие и высокие фундаменты, когда можно ограничиться выполнением краном рабочих операций подъема и опускания крюка, а также изменением его вылета.
Схема самоходного крана с неманевренной расчаленной стрелой представлена на рис. 22. Основные схемы использования кранов с неманевренными расчаленными стрелами приведены на рис. 23.
4.29. Краны с маневренными расчаленными стрелами следует применять для подъемов, при которых требуется также поворот платформы с грузом на крюке в пределах сектора, образованного продолжением горизонтальных проекций ветвей расчалки (сектор обслуживания). Сектор обслуживания в каждом конкретном случае назначают в зависимости от угла поворота платформы крана, необходимого для подъема технологического оборудования. Центральный угол сектора обслуживания не должен превышать 120°. Схема крана с маневренной расчаленной стрелой приведена на рис. 24. Краном с расчаленной маневренной стрелой можно поднимать оборудование методом скольжения и поворота вокруг шарнира (рис. 25).
4.30. В состав работ по подготовке кранов с расчаленными стрелами к монтажу наряду с указанными в общих требованиях (см. разд. 3) входят:
а) переоборудование оголовка стрелы при подъеме оборудования, масса которого превышает максимальную паспортную грузоподъемность крана;
б) сборка системы расчаливания стрелы;
в) крепление расчалки к стреле крана;
г) устройство временных якорей;
д) перевод крана в режим эксплуатации с расчаленной стрелой.
Таблица 10
Максимальные параметры вертикальных аппаратов, которые могут быть подняты стреловыми кранам соответствующих типоразмеров по схеме рис. 20, а также значения усилий в дотягивающей системе (h = 0,2 м, j = 50°, a = 20°)
|
Модель крана |
Длина стрелы, м |
Показатели |
|||||||||
|
A, м |
d, м |
Rmin, м |
Rmax, м |
l, м |
H, м |
Q, т |
P, т |
S, тс |
|||
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
12 |
|
Гусеничные |
МКГ-25 |
12,5 |
11,8 |
Не ограничен |
3,8 |
4,7 |
14,65 |
15,1 |
20 |
80 |
52 |
|
22,5 |
21,7 |
4,0 |
6,45 |
27,7 |
28,2 |
12 |
48 |
32 |
|||
|
32,5 |
31,6 |
5 |
8,5 |
40,75 |
41,2 |
7,5 |
30 |
39 |
|||
|
СКГ-30 |
15 |
14,25 |
5,0 |
5,9 |
18,15 |
18,65 |
27 |
108 |
70 |
||
|
20 |
19,1 |
6,1 |
7,4 |
24,3 |
24,8 |
20 |
80 |
52 |
|||
|
25 |
23,9 |
7,3 |
9,2 |
30,6 |
31,1 |
14 |
56 |
37 |
|||
|
СКГ-40 |
15 |
15 |
4,5 |
5,6 |
18,35 |
18,85 |
29 |
116 |
72 |
||
|
20 |
19,15 |
6,1 |
7,6 |
24,2 |
24,7 |
18,5 |
74 |
48 |
|||
|
25 |
23,95 |
7,3 |
9,15 |
30,3 |
30,8 |
14 |
56 |
37 |
|||
|
СКГ-63 |
15 |
14,7 |
4,5 |
5,6 |
18,3 |
18,8 |
55 |
220 |
140 |
||
|
30 |
29,3 |
6,0 |
9,0 |
37,7 |
38,2 |
25 |
100 |
65 |
|||
|
40 |
39 |
7,0 |
4,35 |
50,7 |
51,2 |
16,5 |
66 |
43 |
|||
|
СКГ-100 |
20 |
19,1 |
6,0 |
7,4 |
24,4 |
24,9 |
69 |
276 |
182 |
||
|
40 |
38,3 |
9,5 |
12,9 |
49,6 |
50,1 |
25 |
100 |
65 |
|||
|
Пневмоколесные на временных опорах |
МКТ-40 |
15 |
14,45 |
3,5 |
4,5 |
18,7 |
24,2 |
40 |
160 |
110 |
|
|
25 |
24,45 |
5,5 |
6,9 |
31,6 |
32,1 |
14 |
56 |
38 |
|||
|
35 |
34,45 |
7 |
9,1 |
45,2 |
45,7 |
8 |
32 |
22 |
|||
Таблица 11
Максимальные параметры вертикальных аппаратов, которые могут быть подняты стреловыми кранами соответствующих типоразмеров по схеме рис. 21, а также значения усилий в дотягивающей системе (h = 0,2 м, j = 50°, a = 20°)
|
Модель крана |
Длина стрелы, м |
Показатели |
|||||||||
|
A, м |
d, м |
Rmin, м |
Rmax, м |
l, м |
H, м |
Q, т |
P, т |
S, тс |
|||
|
Гусеничные |
МКГ-25 |
12,5 |
11,8 |
Не ограничен |
3,8 |
4,7 |
14,65 |
22,0 |
20 |
53 |
34 |
|
22,5 |
21,7 |
4,0 |
6,45 |
27,7 |
41,5 |
12 |
32 |
20 |
|||
|
32,5 |
31,6 |
5,0 |
8,5 |
40,75 |
61,1 |
7,5 |
20 |
13 |
|||
|
СКГ-30 |
15 |
14,25 |
5,0 |
5,9 |
18,15 |
27,2 |
27 |
72 |
46 |
||
|
20 |
19,1 |
6,1 |
7,4 |
24,3 |
36,4 |
20 |
53 |
34 |
|||
|
25 |
23,9 |
7,3 |
9,2 |
30,6 |
45,9 |
14 |
37 |
24 |
|||
|
СКГ-40 |
15 |
15 |
4,5 |
5,6 |
18,35 |
27,5 |
29 |
77 |
50 |
||
|
20 |
19,15 |
6,1 |
7,6 |
24,2 |
36,3 |
18,5 |
49 |
32 |
|||
|
25 |
23,95 |
7,3 |
9,15 |
30,3 |
45,4 |
14 |
37 |
24 |
|||
|
СКГ-63 |
15 |
14,7 |
4,5 |
5,6 |
18,3 |
27,4 |
55 |
146 |
84 |
||
|
30 |
29,3 |
6,0 |
9,0 |
37,7 |
56,5 |
25 |
66 |
42 |
|||
|
40 |
39 |
7,0 |
11,35 |
50,7 |
76,0 |
16,5 |
44 |
29 |
|||
|
СКГ-100 |
20 |
19,1 |
6,0 |
7,4 |
24,4 |
36,6 |
69 |
184 |
17 |
||
|
40 |
38,3 |
9,5 |
12,9 |
49,6 |
74,4 |
25 |
66 |
42 |
|||
|
Пневмоколесные на временных опорах |
МКТ-40 |
15 |
14,45 |
3,0 |
4,5 |
18,7 |
28,0 |
36 |
96 |
76 |
|
|
25 |
24,45 |
6,3 |
6,9 |
31,6 |
47,4 |
28 |
74 |
28 |
|||
|
35 |
34,45 |
6,8 |
9,1 |
45,2 |
67,8 |
16 |
42 |
15 |
|||

Рис. 22. Кран с неманевренной расчаленной стрелой:
1 - кран; 2 - расчалка; 3 - лебедка; 4 - якорь; 5 - уравнительный блок; 6 - полиспаст ветвей системы расчаливания; 7 - одноветвевая система расчаливания; 8 - двухветвевая; 9 - трехветвевая
Рис. 23. Схемы использования кранов с неманевренными расчаленными стрелами:
а - подъем вертикального аппарата одним краном методом скольжения; б - подъем вертикального аппарата двумя кранами методом скольжения; в - подъем горизонтального аппарата двумя кранами; г - перегрузка оборудования краном с железнодорожной платформы на трейлер

Рис. 24. Схема самоходного крана с маневровой расчаленной стрелой:
1 - полиспаст системы расчаливания; 2 - соединительная траверса; 3 - ветви системы расчаливания; 4 - лебедки; 5 - якори; 6 - полиспаст ветвей системы расчаливания
4.31. При подъеме на стреле наименьшей длины грузов, масса которых превышает максимальную паспортную грузоподъемность крана (для кранов СКГ-30, СКГ-40 при подъеме грузов массой более соответственно 30 и 40 т), оголовок стрелы необходимо переоборудовать: установить на верхней оси блока грузового полиспаста два дополнительных ролика (рис. 26) и соответственно перепасовать канат грузового полиспаста, а крюковой блок крана заменить пятирольным блоком БМ-50 грузоподъемностью 50 т. Конец каната грузового полиспаста следует запасовать либо на барабан лебедки основного подъема, либо при наличии конечного выключателя исключающего намотку на барабан лебедки вспомогательного подъема больше 65 м каната, один конец на барабан лебедки основного подъема, другой - на барабан вспомогательного подъема.
Рис. 25. Подъем аппарата методом поворота вокруг шарнира с использованием крана с маневренной расчаленной стрелой
Рис. 26. Схема оголовка стрелы крана СКГ-30 (СКГ-40) с двумя добавленными роликам (сечение поперек стрелы)
4.32. При подъеме на стрелах большой длины грузов, масса которых не превышает максимальную паспортную грузоподъемность кранов, переоборудования оголовков стрел и замены крюковых обойм не требуется.
4.33. Нагрузка на крюки кранов, имеющих на вершине стрелы гусек (МКГ-25) или балансирную балку (СКГ-63, СКГ-100), на которых подвешен грузовой полиспаст, при работе с расчаленными стрелами, а также со стрелами, соединенными ригелем, и с опирающимися стрелами не должна превышать максимальной паспортной грузоподъемности.
4.34. Неманевренное расчаливание стрелы может быть выполнено с помощью одно-, двух- или трехветвевой расчалки, соединяющей оголовок стрелы крана с якорем (см. рис. 22, поз. 7-9).
При подъеме аппарата с расчаленными стрелами длину расчалок выбирают в зависимости от угла наклона плоскости расположения расчалок к горизонту, определяемого необходимым увеличением грузоподъемности крана.
Для безопасной эксплуатации кранов с расчаленными стрелами необходимо, чтобы одноветвевая расчалка располагалась в вертикальной плоскости подвеса стрелы, а при многоветвевой расчалке в этой плоскости должна находиться равнодействующая усилий натяжения ветвей. Рекомендуется преимущественно использовать двухветвевые расчалки.
Для балансировки нагрузок в ветвях многоветвевых расчалок применяют одно- и многорольные блоки. При использовании двухветвевой расчалки для уравновешивания нагрузок на обе ветви применяют однорольный блок, закрепленный у оголовка стрелы крана. В этом случае один конец каната расчалки следует крепить непосредственно к якорю, а другой - к регулировочному полиспасту, закрепленному на другом якоре. При трехветвевой расчалке, ветви которой выполнены из одной нитки каната, для балансировки нагрузок также следует применять однорольный монтажный блок либо роликовый переходник. Для трехветвевой расчалки, средней ветвью которой является многониточный полиспаст, может быть использован многорольный блок, при этом сбегающая и неподвижная нитки каната должны образовывать крайние ветви расчалки.
При подъеме технологического оборудования угол между крайними ветвями расчалок назначается с учетом расположения конструкций, которые могут помешать установке якорей для расчалки.
4.35. Система маневренного расчаливания самоходного крана (см. рис. 24) состоит из полиспаста расчалки 1, закрепленного одним концом за оголовок стрелы крана, а другим - за соединительную траверсу 2, являющуюся связующим звеном между полиспастом расчалки и ее ветвями 3, не сбалансированными между собой и закрепленными за наземные якоря 5 через регулировочные полиспасты 6 лебедки 4, необходимые для установки системы расчаливания в рабочее положение.
В систему маневренного расчаливания самоходного крана входят также приборы контроля за расположением элементов расчалки при эксплуатации крана; датчик положения полиспаста расчалки относительно оси стрелы; контрольно-тяговое устройство, обеспечивающее контроль за положением соединительной траверсы относительно оси поворота платформы крана*.
*Чертежи № 1252 ВНИИМонтажспецстроя.
4.36. Канат для ветвей расчалок рассчитывают с учетом коэффициента запаса прочности К³3,5.
4.37. Полиспаст расчалки, служащий для изменения вылета крюка крана при эксплуатации его с системой маневренного расчаливания, запасовывают (с необходимой для удержания стрелы с грузом кратностью) между двумя блоками, один из которых крепят к оголовку стрелы, а другой - к соединительной траверсе. Полиспаст расчалки можно запасовывать канатом, идущим с лебедки вспомогательного подъема. Блоки полиспастов расчалки должны быть снабжены грузозахватными органами, свободно поворачивающимися вокруг оси и имеющими замки, предотвращающие самопроизвольное выпадение стропов, которым полиспаст крепят к стреле и соединительной траверсе.
Строп расчалки выполняют в виде кольца из одного куска стального каната, концы которого связывают прямым узлом и укрепляют монтажными сжимами.
Длину стропа расчалки в зависимости от конструкции оголовка стрелы крана и типа системы расчаливания выбирают с таким расчетом, чтобы при работе крана с расчаленной стрелой ветви стропа не касались конструкции стрелы.
Полиспаст расчалки располагается в плоскости подвеса стрелы. Сбегающая нитка должна сходить с крайнего ролика верхнего блока полиспаста на барабан лебедки вспомогательного подъема груза. Усилие в этой нитке не должно превышать тягового усилия лебедки вспомогательного подъема.
4.38. Соединительная траверса, связывающая полиспаст расчалки с ее ветвями, должна быть выполнена в виде равностороннего треугольника, к одной из вершин которого крепят полиспаст расчалки, а к двум другим - ветви.
Конструктивно соединительная траверса может быть выполнена в виде двух параллельных треугольных пластин с роликами, расположенными в вершинах (рис. 27), либо в виде тех же пластин, но с заменой роликов осями из вваренных в пластины отрезков труб.
Отношение диаметра ролика (или заменяющей его трубы) к диаметру каната должно быть не меньше 16. Межцентровое расстояние между роликами (или трубами) не должно быть меньше 1,5-2 диаметров ролика (или трубы).
Рис. 27. Конструкция соединительной траверсы:
1 - пластина; 2 - ролик
4.39. Крепление расчалки к стреле крана не должно вызывать в стреле дополнительных изгибающих моментов.
Расчалку крепят за ось неподвижного блока грузового полиспаста (рис. 28) с помощью петли из стального каната, увязанной около моста крепления стрелоподдерживающей системы крана (рис. 29), и с помощью инвентарных переходных проушин конструкции ЦКБ Главстроймеханизации и ПИ Промстальконструкции, приспособленных для работы кранов серии МКГ (рис. 30) и СКГ (рис. 31).
Стрелоподдерживающая система крана при эксплуатации его с системой расчаливания стрелы должна быть ослаблена и не воспринимать нагрузок от массы стрелы и поднимаемого груза.
Рис. 28. Крепление системы расчаливания к стреле крана за ось неподвижного блока грузового полиспаста или за приспособление для установки гуська крана:
а - неманевренная стрела; б - маневренная стрела

Рис. 29. Крепление системы маневренного расчаливания к стреле крана при помощи петли из стального каната, увязанной рядом с местами крепления стрелоподдерживающей системы крана:
1 - полиспаст системы расчаливания; 2 - соединительная траверса; 3 - ветви системы расчаливания; 4 - кольцевой строп; 5 - канат лебедки вспомогательного подъема крана

Рис. 30. Инвентарная переходная проушина конструкции ЦКБ Главстроймеханизации для кранов серии МКГ

Рис. 31. Конструкция крепления маневренной системы расчаливания к стреле крана СКГ-40 (чертеж 4656Р-600 ПИ Промстальконструкция)
4.40. В качестве временных якорей для крепления ветвей расчалки можно использовать инвентарные наземные или полузаглубленные якори, а также рядом стоящие конструкции. При усилии в ветви расчалки до 5 тс можно применять тракторы или трубоукладчики. Усилия в расчалке контролируют динамометром, установленным в системе расчаливания у якоря.
При использовании двухветвевой расчалки якори следует располагать симметрично относительно плоскости подъема, проходящей через продольную ось стрелы крана. Все расстояния должны быть измерены рулеткой.
При работе крана с неманевренной расчаленной стрелой можно по согласованию со строительной организацией использовать для крепления расчалки стрелы высокие конструкции, расположенные в монтажной зоне, что позволяет увеличить грузоподъемность крана (см. графики рис. 32-38) и снизить усилия в расчалке.
4.41. Перевод крана, установленного в проектное положение, в режим эксплуатации с неманевренной расчаленной стрелой производят в следующем порядке:
а) закрепив ветви расчалки к стреле крана и к якорям, стреловым полиспастом крана устанавливают стрелу под углом 70-75° к горизонту;
Рис. 32. Графики возможного увеличения грузоподъемности крана с маневренной и неманевренной расчаленной стрелой на минимальном вылете крюка в зависимости от угла наклона расчалки к горизонту для кранов МКГ-20. Отрицательный угол Θ соответствует закреплению расчалки за рядом стоящую конструкцию, высота которой превышает высотную отметку оголовка стрелы крана
б) полиспастом, регулирующим длину расчалки, натягивают ее до тех пор, пока вся нагрузка от массы стрелы без груза на крюке будет воспринята расчалкой; стреловой полиспаст крана должен быть выключен из работы;
в) изменяя длину расчалки, устанавливают необходимый для работы крана начальный вылет крюка.
4.42. Систему маневренного расчаливания собирают после установки крана в исходное положение. Для этого поверх уложенной на козлы стрелы укладывают последовательно от вершины стрелы верхний и нижний блоки полиспаста расчалки, соединительную траверсу и увязывают их между собой. К соединительной траверсе крепят ветви расчалки.
Рис. 33. Графики возможного увеличения грузоподъемности крана с маневренной и неманевренной расчаленной стрелой на минимальном вылете крюка в зависимости от угла наклона расчалки к горизонту для кранов МКГ-25

Рис. 34. Графики возможного увеличения грузоподъемности крана с маневренной и неманевренной расчаленной стрелой на минимальном вылете крюка в зависимости от угла наклона расчалки к горизонту для кранов СКГ-30
Рис. 35. Графики возможного увеличения грузоподъемности крана с маневренной и неманевренной расчаленной стрелой на минимальном вылете крюка в зависимости от угла наклона расчалки к горизонту для кранов СКГ-40
Рис. 36. Графики возможного увеличения грузоподъемности крана с маневренной и неманевренной расчаленной стрелой на минимальном вылете крюка в зависимости от угла наклона расчалки к горизонту для кранов СКГ-50
Рис. 37. Графики возможного увеличения грузоподъемности крана с маневренной и неманевренной расчаленной стрелой на минимальном вылете крюка в зависимости от угла наклона расчалки к горизонту для кранов СКГ-63
Рис. 38. Графики возможного увеличения грузоподъемности крана с маневренной и неманевренной расчаленной стрелой на минимальном вылете крюка в зависимости от угла наклона расчалки к горизонту для кранов СКГ-100
После сборки и проверки системы расчаливания поднимают стрелу крана на необходимый для подъема груза угол стреловым полиспастом, поворачивают платформу к поднимаемому грузу и стропят его к крюку крана. Стрела крана при этом должна находиться внутри сектора обслуживания.
4.43. При переводе крана из обычного режима использования в режим эксплуатации с маневренной расчаленной стрелой необходимо:
а) работой регулировочных полиспастов, установленных на якорях ветвей расчалок, вывести систему расчаливания в проектное положение;
б) ослабить стреловой полиспаст крана таким образом, чтобы нагрузка воспринималась только системой расчаливания;
в) работой грузового полиспаста и полиспастов системы расчаливания отрегулировать положение соединительной траверсы и вылет крюка. Центр соединительной траверсы должен располагаться на оси вращения поворотной платформы крана, а полиспаст расчалки должен находиться в плоскости подвеса стрелы. Это достигается поочередной работой полиспастов, установленных в ветвях расчалки, и полиспаста расчалки.
Если соединительная траверса смещается от оси вращения поворотной платформы к стреле, то для вывода траверсы в проектное соложение необходимо увеличить длину полиспаста системы расчаливания, одновременно уменьшив длину ветвей расчалки.
При смещении соединительной траверсы из плоскости подвеса стрелы ее устанавливают в проектное положение, изменяя длину ветвей расчалки. Например, если соединительная траверса сместилась вправо от оси вращения поворотной платформы крана, то для возвращения ее в проектное положение необходимо удлинить правую ветвь расчалки и соответственно уменьшить длину левой ветви.
4.44. Положение элементов системы маневренного расчаливания следует контролировать с помощью приборов контроля конструкции СКБ ВНИИМонтажспецстроя (черт. № 1252), а положение грузового полиспаста - с помощью теодолита.
В случае отсутствия приборов контроля правильность положения соединительной траверсы и полиспаста расчалки относительно плоскости подвеса, стрелы определяют при помощи теодолитов. В этом случае к траверсе должен быть подвешен отвес, по которому контролируют ее положение.
4.45. Отклонение грузового полиспаста от вертикали, а также полиспаста расчалки от плоскости подвеса стрелы при эксплуатации крана с системой маневренного расчаливания стрелы не должно превышать 0°30¢ при горизонтальной установке крана. Отклонение полиспаста расчалки от плоскости подвеса стрелы контролирует датчик положения полиспаста. При отсутствии этого датчика положение полиспаста расчалки контролируют теодолитом.
4.46. Площадка в зоне установки крана должна быть спланирована и уплотнена. Несущая способность площадки должна быть не менее 5 кгс/см2.
Допустимый угол наклона крана не должен превышать 0°30¢ и должен контролироваться с помощью геодезических приборов.
Значения допусков на отклонение полиспаста расчалки и грузового полиспаста крана, а также на негоризонтальность установки крана даны из условия возможности эксплуатации самоходных кранов в обычных режимах (без системы расчаливания) на площадках с уклоном до 3°.
4.47. Угол поворота платформы крана с маневренной расчаленной стрелой с грузом на крюке должен быть меньше центрального угла сектора обслуживания на 10-14° (5-7° с каждой стороны).
Совмещение рабочих операций при эксплуатации крана с маневренной и неманевренной расчаленной стрелой запрещено.
4.48. При эксплуатации крана с маневренной расчаленной стрелой тормоза всех рабочих механизмов должны быть нормально замкнуты. Расчаленную стрелу желательно располагать поперек гусениц. При расположении стрелы по продольной оси крана под его гусеницы следует подложить упоры из шпал.
4.49. Для подъема вертикального и горизонтального технологического оборудования можно использовать спаренные самоходные краны с временно расчаленными стрелами (см. рис. 23, б, г) без поворота платформы.
4.50. При спаренной работе кранов с расчаленными стрелами разрешается выполнять операции подъема и опускания крюка, изменения вылета крюка. Совмещение этих операций запрещено.
4.51. Поднимать вертикальное технологическое оборудование спаренными кранами следует с применением балансирных устройств и обеспечением контроля за равномерностью нагружения кранов. Нагружение рекомендуется контролировать с помощью динамометров, установленных на расчалках у якорей или навешенных на крюки кранов. Положение систем расчаливания следует контролировать с помощью приборов контроля конструкции СКВ ВНИИМонтажспецстроя (черт. 1252.00.00.000) или (при их отсутствии) теодолитами.
4.52. Грузоподъемность каждого из спаренных кранов с расчаленными стрелами на минимальном вылете крюка при использовании балансирных устройств приведена на рис. 32-38.
4.53. Технология подъема вертикальных и горизонтальных аппаратов спаренными кранами с расчаленными стрелами (см. рис. 23, б, г) аналогична технологии подъема по схеме рис. 10 и 44, а.
4.54. Графики возможного увеличения
максимальной грузоподъемности ![]() (G1 и G2 - соответственно грузоподъемность крана в обычном режиме работы
и с расчаленной стрелой) ряда моделей самоходных кранов с неманевренными и
маневренными расчаленными стрелами на минимальном вылете крюка в зависимости от
угла наклона плоскости расчалки к горизонту q, или расстояния по горизонтали от оси
крепления стрелы до якоря lя
приведены на рис. 32-38.
(G1 и G2 - соответственно грузоподъемность крана в обычном режиме работы
и с расчаленной стрелой) ряда моделей самоходных кранов с неманевренными и
маневренными расчаленными стрелами на минимальном вылете крюка в зависимости от
угла наклона плоскости расчалки к горизонту q, или расстояния по горизонтали от оси
крепления стрелы до якоря lя
приведены на рис. 32-38.
Графики предусматривают горизонтальную установку крана и расположение равнодействующей усилия в расчалке в вертикальной плоскости, проходящей через ось стрелы. Они позволяют определить центр заложения якоря расчалки в зависимости от требуемого увеличения грузоподъемности крана при работе его на минимальном вылете крюка.
4.55. Пример пользования графиками и методика расчета грузоподъемности крана с расчаленной стрелой приведены в приложении 3.
Г. Подъем вертикальных аппаратов кранами со стрелами, соединенными ригелем (рис. 39)
4.56. Способ следует применять при установке методом скольжения в стесненных условиях аппаратов, масса которых превышает суммарную паспортную грузоподъемность имеющихся кранов. В этом случае краны могут совершать операцию подъема и опускания крюка. При этом вертикальные аппараты, как правило, поднимают с использованием балансирных устройств.
Рис. 39. Схема подъема аппарата самоходными кранами со стрелами, соединенными ригелем:
а - подъем аппарата; б - подъем стрелы с ригелем; 1 - подтаскивающая система; 2 - тормозная оттяжка
4.57. В состав работ по подготовке к подъему кранов со стрелами, соединенными ригелем, кроме общих требований (см. раздел 3) входят:
а) при подъеме оборудования, масса которого превышает максимальную паспортную грузоподъемность кранов, переоборудование оголовков их стрел;
б) установка ригеля на стреле одного из кранов.
4.58. Оголовки стрел кранов переоборудуют аналогично подготовке кранов для работы с расчаленными стрелами (см. п.4.31).
4.59. Установку ригеля (см. рис. 39) в рабочее положение производят в следующем порядке:
кладут стрелу крана на козлы и соединяют удерживаемый трубоукладчиком ригель с оголовком стрелы; закрепляют ригель специально изготовленной осью в отверстиях на оголовке стрелы, предназначенных для установки маневрового клюва;
поднимают стрелу с ригелем в проектное положение;
поднимают ригель лебедкой вспомогательного подъема или ручной лебедкой грузоподъемностью 3-5 т, закрепленной на поворотной платформе крана;
устанавливают оба крана в проектное положение с расстоянием между оголовками стрел на 0,5 м меньшим, чем длина ригеля;
с помощью ручной лебедки или лебедки вспомогательного подъема ригель, закрепленный на одном из кранов, наводят на дополнительную ось, установленную на оголовке стрелы второго крана, путем поочередного уменьшения вылета стрел каждого крана. После того, как ригель своими пазами зайдет в зацепление с осью, ослабляют стреловые полиспасты (до небольшого провисания).
4.60. Соединять ригель со стрелой второго крана необходимо при отсутствии рабочих-монтажников на высоте.
4.61. Конструкция ригеля показана на рис. 40. Параметры ригелей для ряда моделей кранов приведены в приложении 4.
4.62. До начала подъема краны должны быть установлены с оси фундамента. Соосность установки кранов проверяют до укладки аппарата в исходное положение по пяти точкам, четыре их которых являются проекциями двух оголовков и середины стрел на горизонтальную плоскость, а пятая - центром фундамента. Проекции получают с помощью отвесов, привязанных в двух местах продольных осей каждой стрелы. Точки проекций должны располагаться на горизонтальной прямой, проходящей по осям двух кранов с допуском ±8 см. Прямую наносят с помощью шнура.
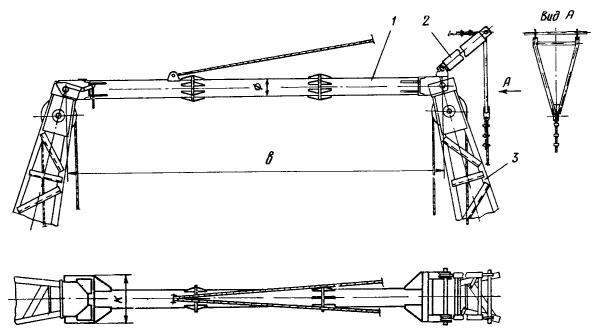
Рис. 40. Ригель для соединения стрел кранов:
1 - ригель; 2 - стойка; 3 - стрела крана
4.63. Уклон площадки в зоне установки кранов не должен превышать 1°.
4.64. Аппарат необходимо уложить так, чтобы место строповки расположилось на оси фундамента.
4.65. Поднимать аппарат следует кранами с заторможенными механизмами поворота аналогично подъему по схеме рис. 10.
4.66. Кранами со стрелами, соединенными ригелем, можно поднимать вертикальные аппараты, параметры которых приведены в таблице 12.
Опорную часть аппарата при отрыве от основания удерживают от раскачивания тормозной оттяжкой.
4.68. По окончании подъема ригель поднимают лебедкой вспомогательного подъема или ручной лебедкой, натянув стреловые полиспасты кранов и открыв замок, фиксирующий ригель.
Таблица 12
Максимальные параметры вертикальных аппаратов, которые могут быть подняты стреловыми кранами соответствующих типоразмеров по схеме рис. 39, а также значения усилий в подтаскивающей системе (h = 0,35 м, h0 = 0,6 м, Z = 1,5 м)
|
Модель крана |
Длина стрелы, м |
Показатели |
||||||||
|
A, м |
R, м |
d, м |
H, м |
l, м |
Q, т |
P, т |
S, тс |
|||
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
|
|
|
12,5 |
12,0 |
4 |
|
12,4 |
9,9 |
25,0 |
50 |
12,5 |
|
11,4 |
6 |
11,8 |
9,3 |
24,0 |
48 |
12,0 |
||||
|
10,5 |
8 |
10,9 |
8,4 |
22,5 |
45 |
11,2 |
||||
|
9 |
10 |
9,4 |
6,9 |
21,0 |
42 |
10,5 |
||||
|
7 |
12 |
7,4 |
4,9 |
19,7 |
39,4 |
9,8 |
||||
|
Гусеничные |
МКГ-25 |
17,5 |
17,0 |
4,5 |
Ограничен длиной ригеля |
17,4 |
14,9 |
25,0 |
50 |
12,5 |
|
16,6 |
6 |
17,0 |
14,5 |
25,0 |
50 |
12,5 |
||||
|
16 |
8 |
16,4 |
13,9 |
23,0 |
46 |
11,5 |
||||
|
15 |
10 |
15,4 |
12,9 |
22,0 |
44 |
11,0 |
||||
|
13,7 |
12,7 |
14,1 |
11,6 |
20,5 |
41 |
10,2 |
||||
|
- |
15,50 |
- |
- |
19,7 |
39,4 |
- |
||||
|
22,2 |
22,0 |
5,2 |
22,4 |
19,9 |
22,0 |
44 |
11,0 |
|||
|
21,2 |
8 |
21,6 |
19,1 |
21,5 |
43 |
10,7 |
||||
|
20,5 |
10 |
20,9 |
18,4 |
20,5 |
41 |
10,2 |
||||
|
19,7 |
12 |
20,1 |
17,6 |
20,5 |
41 |
10,2 |
||||
|
18,5 |
14 |
18,9 |
16,4 |
19,5 |
39 |
9,7 |
||||
|
- |
18,9 |
- |
- |
16,5 |
33 |
- |
||||
|
27,5 |
27 |
6 |
27,4 |
24,9 |
17,7 |
35,4 |
8,8 |
|||
|
26,3 |
8 |
26,7 |
24,2 |
17,2 |
34,4 |
8,6 |
||||
|
25,7 |
10 |
26,1 |
23,6 |
16,7 |
33,4 |
8,3 |
||||
|
25,2 |
12 |
25,6 |
23,1 |
15,7 |
31,4 |
7,8 |
||||
|
23,7 |
15 |
24,1 |
21,6 |
13 |
26 |
6,5 |
||||
|
Гусеничные |
СКГ-30 СКГ-40 |
15 |
14,5 |
5 |
Ограничен длиной ригеля |
14,9 |
12,4 |
49 |
98 |
24,5 |
|
14,5 |
5,5 |
14,9 |
12,4 |
49 |
98 |
24,5 |
||||
|
14,3 |
6 |
14,7 |
12,2 |
48,5 |
97 |
24,2 |
||||
|
14,0 |
7 |
14,4 |
11,9 |
47,5 |
95 |
23,8 |
||||
|
13,5 |
8 |
13,9 |
11,4 |
46,5 |
93 |
23,2 |
||||
|
12,5 |
10 |
12,9 |
10,4 |
43,5 |
87 |
21,8 |
||||
|
10,7 |
12 |
11,1 |
8,6 |
39 |
78 |
19,5 |
||||
|
20 |
19,0 |
6,6 |
19,4 |
16,9 |
41 |
82 |
20,5 |
|||
|
18,9 |
8 |
19,3 |
16,8 |
40,5 |
81 |
20,2 |
||||
|
18,1 |
10 |
18,5 |
16,0 |
39 |
78 |
19,5 |
||||
|
17,0 |
12 |
17,4 |
14,9 |
37,5 |
75 |
18,8 |
||||
|
15,6 |
14 |
16,0 |
13,5 |
35 |
70 |
17,5 |
||||
|
13,7 |
16 |
14,1 |
11,6 |
31,5 |
63 |
15,8 |
||||
|
11,2 |
18 |
11,6 |
9,1 |
27 |
54 |
13,5 |
||||
|
25 |
23,6 |
8 |
24,0 |
21,5 |
28,5 |
57 |
14,2 |
|||
|
23,1 |
10 |
23,5 |
21,0 |
28 |
56 |
14,0 |
||||
|
22,0 |
13 |
22,4 |
19,9 |
26,5 |
53 |
13,2 |
||||
|
20,4 |
16 |
20,8 |
18,3 |
25 |
50 |
12,5 |
||||
|
17,5 |
19 |
17,9 |
15,4 |
22,5 |
45 |
11,2 |
||||
|
15,6 |
21 |
16,0 |
13,5 |
20 |
40 |
10,0 |
||||
|
Гусеничные |
СКГ-63 |
15 |
15,0 |
5 |
Ограничен длиной ригеля |
15,4 |
12,9 |
63 |
126 |
81,5 |
|
14,6 |
6 |
15,0 |
12 |
60 |
120 |
30,0 |
||||
|
14,3 |
7 |
14,7 |
12,2 |
56 |
112 |
28,0 |
||||
|
14,0 |
8 |
14,4 |
11,9 |
53 |
106 |
26,5 |
||||
|
13,5 |
9 |
13,9 |
11,4 |
50 |
100 |
25,0 |
||||
|
13,0 |
10 |
13,4 |
10,9 |
48 |
96 |
24,0 |
||||
|
11,5 |
12 |
11,9 |
9,4 |
45 |
90 |
22,5 |
||||
|
25 |
24,2 |
6,8 |
24,6 |
22,1 |
55 |
110 |
27,5 |
|||
|
23,9 |
8 |
24,3 |
21,8 |
52 |
104 |
26,0 |
||||
|
23,7 |
9 |
24,1 |
21,6 |
49 |
98 |
24,5 |
||||
|
23,4 |
10 |
23,8 |
21,3 |
46 |
92 |
28,0 |
||||
|
23,1 |
11 |
23,5 |
21,0 |
44 |
88 |
22,0 |
||||
|
22,7 |
12 |
23,1 |
20,6 |
42 |
84 |
21,0 |
||||
|
21,7 |
14 |
22,1 |
19,6 |
40 |
80 |
20,0 |
||||
|
35 |
34,2 |
8 |
34,6 |
32,1 |
50 |
100 |
25,0 |
|||
|
33,7 |
9 |
33,1 |
31,6 |
48 |
96 |
24,0 |
||||
|
33,6 |
10 |
34,0 |
31,5 |
46 |
92 |
28,0 |
||||
|
33,3 |
11 |
33,7 |
31,2 |
44 |
88 |
22,0 |
||||
|
33,0 |
12 |
33,4 |
30,9 |
42 |
84 |
21,0 |
||||
|
32,0 |
15 |
32,4 |
29,9 |
41 |
82 |
20,5 |
||||
|
31,2 |
17 |
31,6 |
29,1 |
40 |
80 |
20,0 |
||||
4.69. Кран, на котором установлен ригель, может перемещаться и выполнять работы с соответственно сниженной грузоподъемностью. При длине ригеля 6 м грузоподъемность крана будет соответствовать грузоподъемности крана с инвентарным клювом длиной 8,0 м.
4.70. Осевое усилие в ригеле Sp (рис. 41) в зависимости от угла наклона стрелы a к горизонтали и массы поднимаемого груза Р следует определять по формуле:
Sp = 0,5×P×ctga. (4)
Рис. 41. График зависимости усилий в ригеле от угла наклона стрелы и массы поднимаемого груза
Д. Подъем вертикальных аппаратов кранами с опирающимися стрелами (рис. 42)
4.71. Способ следует применять при установке методом скольжения в стесненных условиях технологического оборудования, масса которого значительно превышает суммарную паспортную грузоподъемность имеющихся кранов. Краны могут совершать при этом операцию подъема и опускания крюка.

Рис. 42. Схема подъема аппарата кранами со стрелами, опирающимися на А-образные шевры:
а - подъем аппарата; б - установка шевра; 1 - подтаскивающая система; 2 - тормозная оттяжка
Особенностью этого способа является возможность подъема оборудования и конструкций, высота которых может почти в два раза превышать высоту подъема крюков кранов.
4.72. Состав работ по подготовке кранов, монтажной площадки и монтажных элементов к подъему подобен составу подготовительных работ при использовании кранов со стрелами, соединенными ригелем (см. п. 4.57, 4.58, 4.64).
4.73. Кранами с опирающимися стрелами можно осуществлять подъем вертикальных аппаратов и металлоконструкций, параметры которых приведены в табл. 13.
Таблица 13
Максимальные параметры вертикальных аппаратов, которые могут быть подняты стреловыми кранами соответствующих типоразмеров по схеме рис. 42, а также значения усилий в подтаскивающей системе (h = 0,35 м, h0 = 0,6 м, Z = 1,5 м)
|
Длина стрелы, м |
Показатели |
||||||||
|
A, м |
R, м |
d, м |
H, м |
l, м |
Q, т |
P, т |
S, тс |
||
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
|
МКГ-25 |
12,5 |
12,0 |
4 |
Не ограничен |
18,8 |
9,9 |
25 |
50 |
1,3 |
|
10,5 |
8 |
15,8 |
8,4 |
1,5 |
|||||
|
7,0 |
12 |
8,8 |
4,9 |
2,5 |
|||||
|
17,5 |
17,0 |
4,5 |
28,8 |
14,9 |
25 |
50 |
0,84 |
||
|
16,0 |
8 |
26,8 |
13,9 |
0,90 |
|||||
|
13,7 |
12,7 |
22,2 |
11,6 |
0,98 |
|||||
|
22,5 |
22,0 |
5,2 |
38,8 |
19,9 |
25 |
50 |
0,63 |
||
|
20,5 |
10 |
35,8 |
18,4 |
0,68 |
|||||
|
18,5 |
14 |
31,8 |
16,4 |
0,76 |
|||||
|
27,5 |
27,0 |
6 |
48,8 |
24,9 |
25 |
50 |
0,5 |
||
|
25,7 |
10 |
46,2 |
23,6 |
0,53 |
|||||
|
23,7 |
15 |
42,2 |
21,6 |
0,58 |
|||||
|
СКГ-30, СКГ-40 |
15 |
14,5 |
5 |
Не ограничен |
23,8 |
12,4 |
50 |
100 |
2,0 |
|
14,5 |
5,5 |
23,8 |
12,4 |
2,0 |
|||||
|
14,3 |
6 |
23,4 |
12,2 |
2,02 |
|||||
|
14,0 |
7 |
22,8 |
11,9 |
2,1 |
|||||
|
13,5 |
8 |
21,8 |
11,4 |
2,2 |
|||||
|
12,5 |
10 |
19,8 |
10,4 |
2,4 |
|||||
|
10,7 |
12 |
16,2 |
8,6 |
2,9 |
|||||
|
СКГ-30, СКГ-40 |
20 |
19,0 |
6,6 |
32,8 |
16,9 |
50 |
100 |
1,48 |
|
|
18,1 |
10 |
31,0 |
16,0 |
1,56 |
|||||
|
15,6 |
14 |
26,0 |
13,5 |
1,85 |
|||||
|
11,2 |
18 |
17,2 |
9,1 |
2,7 |
|||||
|
25 |
23,6 |
8 |
42,0 |
21,5 |
50 |
100 |
1,16 |
||
|
22,0 |
13 |
38,8 |
19,9 |
1,25 |
|||||
|
17,5 |
19 |
29,8 |
15,4 |
1,62 |
|||||
|
15,6 |
21 |
26,0 |
13,5 |
1,85 |
|||||
|
СКГ-63 |
15 |
15,0 |
5 |
24,8 |
12,9 |
63 |
126 |
2,4 |
|
|
14,6 |
6 |
24,0 |
12,5 |
2,5 |
|||||
|
14,3 |
7 |
23,4 |
12,2 |
2,6 |
|||||
|
14,0 |
8 |
22,8 |
11,9 |
2,64 |
|||||
|
13,5 |
9 |
21,8 |
11,4 |
2,73 |
|||||
|
13,0 |
10 |
20,8 |
10,9 |
2,9 |
|||||
|
11,5 |
12 |
17,8 |
9,4 |
3,3 |
|||||
|
25 |
24,2 |
6,8 |
43,2 |
22,1 |
63 |
126 |
1,41 |
||
|
23,9 |
8 |
42,6 |
21,8 |
1,44 |
|||||
|
23,7 |
9 |
42,2 |
21,6 |
1,45 |
|||||
|
23,4 |
10 |
41,6 |
21,3 |
1,48 |
|||||
|
23,1 |
11 |
41,0 |
21,0 |
1,5 |
|||||
|
22,7 |
12 |
40,2 |
20,6 |
1,52 |
|||||
|
21,7 |
14 |
38,2 |
19,6 |
1,6 |
|||||
|
СКГ-63 |
35 |
34,2 |
8 |
Не ограничен |
63,2 |
32,1 |
63 |
126 |
0,98 |
|
33,7 |
9 |
62,2 |
31,6 |
0,99 |
|||||
|
33,6 |
10 |
62,0 |
31,5 |
1,0 |
|||||
|
33,3 |
11 |
61,4 |
31,2 |
1,1 |
|||||
|
33,0 |
12 |
60,8 |
30,9 |
1,2 |
|||||
|
32,0 |
15 |
58,8 |
29,9 |
1,5 |
|||||
|
31,2 |
17 |
57,2 |
29,1 |
1,8 |
|||||
4.74. Узел крепления шевра к стрелам кранов СКГ-30, СКГ-40 и МКГ-25 показан на рис. 43, а параметры шевров - в приложении 5.
Рис. 43. Узел крепления шевра к стреле
а - кранов СКГ-30 и СКГ-40; б - крана МКГ-25
4.75. Установку шевра в рабочее положение на первом кране производят в следующем порядке (см. рис. 42, б):
к уложенной головной частью на козлы стреле первого крана (положение I) крепят А-образный шевр, удерживаемый вторым краном;
стрелу первого крана с закрепленным к ней шевром поднимают вторым краном из положения I в положение II до угла 35° к горизонту;
стреловым полиспастом первого крана стрелу поднимают из положения II в исходное для монтажа положение III.
Шевр, соединенный со стрелой второго крана, устанавливают в том же порядке, что и шевр первого крана; в качестве подъемного механизма используют первый кран с присоединенным к нему ранее шевром, подтянутым и закрепленным канатом к основанию стрелы этого крана. Соосность установки крана и опоры обеспечивается самим узлом крепления опоры к оголовку стрелы крана (см. рис. 43). Демонтаж шевров следует производить в обратном порядке.
4.76. Для более равномерного распределения давления следует укладывать под основания шевров шпалы или инвентарные шиты. Перед началом нагружения стрел с подвешенными шеврами между основанием шевров и находящимися под ними шпальными клетками следует оставить зазор 30 мм, который после нагружения шевров обеспечит работу стрел кранов на сжатие.
4.77. Аппарат следует поднимать кранами при заторможенных механизмах поворота, натянутых стреловых полиспастах и включенных ограничителях грузового момента.
4.78. При пробном нагружении кранов путем отрыва головной части аппарата от основания следует с помощью уровня проверить величину просадки каждой из ног опорных шевров. Для ног шевра высотой 25 м разница в просадке не должна превышать 5 мм. Если просадка одной из ног шевра превышает просадку второй больше чем на 5 мм, необходимо приподнять шевр над шпальными клетками и устранить его перекос, после чего еще раз проверить точность установки.
4.79. Технология подъема аппарата аналогична принятой для кранов со стрелами, соединенными ригелем (см. п. 4.65 и 4.67).
4.80. Отклонение грузовых полиспастов от вертикали из плоскости стрел не должно превышать 3°.
4.81. Усилие в стреловом полиспасте при подъеме аппарата кранами с опирающимися стрелами не должно превышать нагрузок при их работе в обычном режиме.
Усилие в стреловом полиспасте следует контролировать с помощью динамометра, установленного в неподвижной нитке каната стрелового полиспаста крана.
4.82. При работе кранов с вылетами крюка, превышающими минимальный, необходимо соответствующее изменение высоты шевра.
4.83. Допускается перемещение кранов без демонтажа шевров, которые в этом случае должны быть подтянуты к стреле и прикреплены к ней.
4.84. Пример расчета усилий в стреле крана СКГ-30 (СКГ-40), шевре и стреловом полиспасте приведен в приложении 6.
4.85. Рекомендуемые конструкции балансирных траверс для подъема аппаратов несколькими кранами приведены в приложении 7.
5. ПОДЪЕМ ГОРИЗОНТАЛЬНЫХ АППАРАТОВ
5.1. Горизонтальные аппараты в зависимости от их габаритов и массы, количества и характеристик имеющихся кранов, высоты и конфигурации постамента под аппарат могут быть подняты и установлены в проектное положение одним или несколькими кранами.
5.2. Рекомендуемые схемы подъема горизонтальных аппаратов одним краном приведены на рис. 44.
5.3. В случае, когда возможен проезд крана между опорными фундаментами аппаратов, следует их монтировать по схемам рис. 44, а, б, в.
5.4. Если грузоподъемность крана на номинальном вылете крюка равна массе поднимаемого аппарата, его следует устанавливать по схеме рис. 44, б.
5.5. При невозможности проезда крана и расположения монтируемого аппарата между опорными фундаментами аппарат следует поднимать по схемам рис. 44, г, д.
5.6. Рекомендуемые схемы подъема горизонтальных аппаратов спаренными кранами приведены на рис. 45.
Рис. 44. Рекомендуемые схемы подъема горизонтальных аппаратов одним краном:
I и II - положения аппарата

Рис. 45. Рекомендуемые схемы подъема горизонтальных аппаратов спаренными кранами:
I и II - положения аппаратов
5.7. При монтаже горизонтальных аппаратов по схемам рис. 44 и рис. 45, а, в возможно применение кранов с расчаленными стрелами (см., например, рис. 23, в).
6. ТРЕБОВАНИЯ ТЕХНИКИ БЕЗОПАСНОСТИ ПРИ МОНТАЖЕ ТЕХНОЛОГИЧЕСКОГО ОБОРУДОВАНИЯ САМОХОДНЫМИ КРАНАМИ
6.1. При монтаже технологического оборудования с помощью самоходных стреловых кранов следует соблюдать требования техники безопасности, наложенные в "Правилах устройства и безопасной эксплуатации грузоподъемных кранов", а также в инструкциях по эксплуатации и монтажу кранов, настоящих Указаниях и "Инструкции по технике безопасности при эксплуатации стреловых самоходных кранов" ВСН 274-74/ММСС СССР.
6.2. Подъем и установку оборудования стреловыми кранами обязательно производить в присутствии лица, ответственного за безопасное производство работ по перемещению грузов кранами.
6.3. При подъеме и установке технологического оборудования кранами с расчаленными и соединенными ригелем стрелами, а также с опирающимися стрелами следует соблюдать приведенные в настоящих Указаниях дополнительные требования к подготовке основания под краны и к положению их грузовых полиспастов, а также допуски на соосность установки кранов, расположения расчалок, якорей и опор.
6.4. Перед началом производства работ краны с расчаленными стрелами и стрелами, соединенными ригелем, должны быть выдержаны под нагрузкой в течение времени, необходимого для проверки правильности строповки и надежности действия тормозов, а также осмотра всех нагруженных систем.
6.5. До начала работы кранов с опирающимися стрелами вновь изготовленные А-образные шевры должны быть испытаны в рабочем положении нагрузкой на крюках кранов, превышающей на 25 % их суммарную грузоподъемность при работе в данном режиме.
Приложение 1
ПРИМЕР РАСЧЕТА ФУНДАМЕНТА ПРИ ПОДЪЕМЕ ВЕРТИКАЛЬНЫХ АППАРАТОВ МЕТОДОМ ПОВОРОТА
Исходные данные
Основание бетонного фундамента (рис. 46) - мелкие пески средней плотности горизонтального залегания на глубину более полуторной ширины фундамента плюс 1 м. Допустимое давление на основание RН = 20 тс/м2. Расчетный коэффициент трения бетона фундамента по основанию fp = 0,45.
Рис. 46. Схема к поверочному расчету фундамента
Засадка пазух фундамента произведена мелким
песком с тщательным уплотнением. Объемная масса грунта засыпки ![]() = 1,8 т/м3;
расчетный угол внутреннего трения грунта засыпки j = 30°;
угол трения грунта по стенке фундамента d = 30°. Грунтовые воды отсутствуют.
= 1,8 т/м3;
расчетный угол внутреннего трения грунта засыпки j = 30°;
угол трения грунта по стенке фундамента d = 30°. Грунтовые воды отсутствуют.
При подъеме вертикальных аппаратов методом поворота к фундаменту приложена нормативная горизонтальная нагрузка Nн = 50 тс на расстоянии от подошвы фундамента hN = 2,08 м.
Вертикальная нормативная нагрузка, приведенная к равномерно распределенному давлению, которое передается через опорную плиту на грунт, равна Pн = 10 тс/м2.
Проверка фундамента на скольжение на уровне подошвы фундамента
Фундамент устойчив, если
![]() . (7)
. (7)
Нормативная масса фундамента ![]() равна
равна

Нормативная масса грунта на уширениях
фундамента ![]() составляет
составляет

Нормативная горизонтальная нагрузка, действующая на фундамент, равна Nн = 50 тс; расчетный коэффициент трения бетона по основанию fp = 0,45; нормативное давление на уширения фундамента от пригрузки на грунт
![]() = Pн×Fy = 10×1,4 = 14 т.
= Pн×Fy = 10×1,4 = 14 т.
Нормативное активное давление грунта на стенку фундамента (Eа) составляет
Eа = ![]() , (8)
, (8)
где h = 1,85 - глубина засыпки, м;
B0 = 4,12 - средняя ширина фундамента, м;
la - коэффициент активного давления грунта по теории предельного равновесия; при вертикальной стенке фундамента и j = 30°, d = 30°, la = 0,27.
Таким образом, Ea = 1,8×![]() ×4,12×0,27 = 3,44 тc.
×4,12×0,27 = 3,44 тc.
Нормативное активное давление на стенку фундамента от пригрузки на грунт Ep равно
Ep = PнhBla,
где В = 3 (ширина опорной плиты, м).
Следовательно, Ep = 10×1,85×3,0×0,27 = 15 тс.
Нормативное пассивное давление грунта на стенку фундамента (Eп) составляет
Eп = ![]() , (9)
, (9)
где lп - коэффициент пассивного давления грунта по теории предельного равновесия при вертикальной стенке фундамента и j = 30°, d = 30°, lп = 0,27.
Таким образом Eп = 1,8×![]() ×4,12·5,67 = 72 тс.
×4,12·5,67 = 72 тс.
Коэффициенты перегрузки n1, n2, n3 принимают по СНиП II-А.11-62.
Подставив найденные значения величин правой и левой частей уравнения, найдем
n1![]() + n2
+ n2![]() = 0,9×68,6 + 0,8×10,5 = 70,1 т.
= 0,9×68,6 + 0,8×10,5 = 70,1 т.
т.е. устойчивость на сдвиг по подошве фундамента обеспечена.
Проверка основания фундамента по деформациям
Действующие по краям подошвы фундамента напряжения вычисляют по формуле
P =  (10)
(10)
где ![]() - вертикальные силы, действующие на основание.
- вертикальные силы, действующие на основание.
Они равны
![]() = 68,6 + 10,5 + 14,0 = 93,1 т.
= 68,6 + 10,5 + 14,0 = 93,1 т.
Площадь подошвы (Fф) составляет:
Fф = ![]()
Момент сопротивления подошвы фундамента (Wф) равен
Wф = ![]()
Эксцентриситет (l) приложения вертикальных сил относительно центра тяжести подошвы фундамента определяют по формуле
![]() ,
,
где ![]() - момент всех сил относительно центра тяжести подошвы
фундамента, равный
- момент всех сил относительно центра тяжести подошвы
фундамента, равный
![]() (11)
(11)
xp - расстояние от центра тяжести площади уширения (Fу ), на которую давит опорная плита поворотного шарнира, до центра тяжести подошвы фундамента; xp = 1,9 м см. рис. 46).
![]() = 50×2,08 + 15,0×0,93-14,0×1,9 = 91,4 тс.м;
= 50×2,08 + 15,0×0,93-14,0×1,9 = 91,4 тс.м;
![]()
но 0,25Dф = 1,30 м.
Поскольку эксцентриситет l больше ядрового расстояния rя, то равнодействующая выходит из ядра сечения и фундамент будет работать с отрывом от грунта.
Горизонтальные нагрузки, вызывающие отрыв фундамента от грунта, кратковременны и действуют только в период монтажа. Равнодействующая проходит от центра тяжести подошвы фундамента на расстоянии меньше 0,25 диаметра подошвы фундамента (Dф) в плоскости действия момента, поэтому допускается неполное опирание фундамента на основание.
При этом Pmax = ![]() тс/м2 < 1,2 Rн = 1,2×20,0 = 24 тс/м2, а среднее
давление на основание равно
тс/м2 < 1,2 Rн = 1,2×20,0 = 24 тс/м2, а среднее
давление на основание равно
PN =  тс/м2 <
Rн = 20 тс/м2.
тс/м2 <
Rн = 20 тс/м2.
Результаты проверки данного основания по деформациям остаются удовлетворительными, если Pmax£1,2Rн и Pн£Rн, т.е. в рассмотренном примере прочность основания обеспечена.
Приложение 2
ПРИМЕР РАСЧЕТА ДОПУСКАЕМОГО УГЛА ОТКЛОНЕНИЯ ОСИ АППАРАТА ОТ ВЕРТИКАЛИ И РАЗНИЦЫ ОТМЕТОК МЕСТ СТРОПОВКИ ПРИ НЕРАВНОМЕРНОЙ РАБОТЕ КРАНОВ
Для подъема аппарата массой (P) 36 т, высотой 30 м и диаметром 3 м, с центром тяжести посередине применяют два крана СКГ-30 со стрелами длиной 20 м, грузоподъемностью на минимальном вылете (Q) по 20 т. Аппарат стропят за монтажные штуцеры длиной по 0,5 м, что обеспечивает расстояние между местами строповки (d), равное 4 м. Ось монтажных штуцеров расположена выше центра тяжести аппарата на расстоянии a = 1 м.
Требуется определить предельно допустимые значения h и j. Определяем величину расчетной допустимой вспомогательной нагрузки на один кран (П)
П = ![]()
а затем отношение
К = ![]()
По графику рис. 9 находим j и h: при П = 11 % и К = 0,25, j = 12°
и ![]() = 0,2 или h = 0,2×d = 0,2×4 = 0,8 м = 800 мм.
= 0,2 или h = 0,2×d = 0,2×4 = 0,8 м = 800 мм.
Приложение 3
ПРИМЕР ПОЛЬЗОВАНИЯ ГРАФИКАМИ ВОЗМОЖНОГО УВЕЛИЧЕНИЯ ГРУЗОПОДЪЕМНОСТИ КРАНА С РАСЧАЛЕННОЙ СТРЕЛОЙ И МЕТОДИКА РАСЧЕТА ЕГО ГРУЗОПОДЪЕМНОСТИ И УСИЛИЙ В РАСЧАЛКАХ
Пример пользования графиками
Краном МКГ-25 со стрелой длиной 32,5 м, с паспортной грузоподъемностью G1 = 10 т требуется поднять груз массой G2 = 16 т.
Необходимо найти угол наклона плоскости расчалки к горизонту и расстояние от шарнира стрелы до центра заложения якорей.
![]()
По графику на рис. 33 для крана МКГ-25 со стрелой длиной 32,5 м находим, что максимальная величина угла наклона плоскости расчалки к горизонту равна 15°, а расстояние от шарнира стрелы до центра заложения якорей не менее 123 м.
Расчет грузоподъемности крана с расчаленной стрелой
В основу определения грузоподъемности крана с расчаленной стрелой положено условие равенства усилий, возникающих в элементах конструкции стрелы крана при эксплуатации его с расчаленной стрелой и в обычном режиме.
Графоаналитический способ расчета
Предварительно грузоподъемность крана с маневренной расчаленной стрелой G2 на минимальном вылете крюка определяют по формуле
G2 = G1![]() (12)
(12)
где G1 - паспортная грузоподъемность крана при обычном режиме работы на минимальном вылете крюка, т;
a0 - угол между осью стрелы и стреловым полиспастом, град;
b - угол между осью полиспаста расчалки и осью стрелы, град;
g - угол между осью грузового полиспаста и осью стрелы, град.
По полученной грузоподъемности составляют расчет стрелы на прочность по общепринятой методике. Он должен подтвердить наличие требуемых запасов прочности конструкции стрелы.
Величину углов a0 и g определяют из конструктивных параметров крана при его работе в обычном режиме. Угол b определяют с учетом расстояния от шарнира стрелы до центра заложения якорей.
Величины углов между осью крана и осью стрелового (a0) и грузового (g0) полиспастов на минимальном вылете крюка кранов различных моделей приведены в табл. 1.
Таблица 1
Углы между осью стрелы крана и осью стрелового (a0) и грузового (g0) полиспастов на минимальном вылете крюков кранов
|
Длина стрелы, м |
Угол a0, град |
Угол g0, град |
|
|
1 |
2 |
3 |
4 |
|
МКГ-20 |
12,5 |
30 |
9 |
|
22,5 |
18 |
9 |
|
|
32,5 |
12 |
9 |
|
|
МКГ-25 |
12,5 |
37 |
6 |
|
17,5 |
20 |
6 |
|
|
22,5 |
16 |
6 |
|
|
27,5 |
11 |
6 |
|
|
32,5 |
9 |
6 |
|
|
СКГ-30 |
15 |
15 |
15 |
|
20 |
10 |
15 |
|
|
25 |
10 |
15 |
|
|
СКГ-40 |
15 |
17,5 |
12,5 |
|
20 |
11 |
12,5 |
|
|
25 |
9 |
12,5 |
|
|
СКГ-50 |
15 |
30 |
12 |
|
30 |
16 |
12 |
|
|
40 |
12 |
12 |
|
|
СКГ-63 |
15 |
25 |
10 |
|
30 |
14 |
10 |
|
|
40 |
10 |
10 |
|
|
Э-1252 |
12,5 |
15 |
13 |
|
20 |
13 |
13 |
|
|
25 |
7 |
13 |
|
|
30 |
5 |
13 |
|
|
СКГ-100 |
20 |
28 |
12 |
|
30 |
16 |
12 |
|
|
35 |
13 |
12 |
Графический способ расчета
Графический способ расчета усилий при подъеме груза краном с расчаленной стрелой показан на рис. 47.
Этот способ расчета при минимальном вылете крюка дает результаты, совпадающие с вычисленными по формуле (12).
При выполнении расчета графическим
способом следует вычертить в масштабе кран с необходимым вылетом крюка. Затем к
оголовку стрелы приложить вычерченный в масштабе вертикальный вектор - усилие ![]() , равное массе груза на данном вылете крюка плюс половина
массы стрелы с грузовым полиспастом 0,7g, т.е.
, равное массе груза на данном вылете крюка плюс половина
массы стрелы с грузовым полиспастом 0,7g, т.е. ![]() = G1 + 0,7g, где g - масса стрелы крана, т.
= G1 + 0,7g, где g - масса стрелы крана, т.
Рис. 47. Схема крана для графического расчета усилий в системах крана
Из конца этого вектора необходимо отложить
вектор - усилие в сбегающей нитке грузового полиспаста (Sсб1). Из конца вектора Sсб1
проводят прямую, параллельную оси стрелоподдерживающей системы, до пересечения
с осью стрелы. Отрезок на оси стрелы от ее оголовка до точки пересечения с
прямой, параллельной стрелоподдерживающей системе, равен сжимающей стрелу
нагрузке (S). Из
конца вектора S,
проводят прямую до конца вектора суммы ![]() + Sсб2 где
+ Sсб2 где ![]() = G2 + 0,1g, Sсб2 -
усилие в сбегающей нитке грузового полиспаста. Эта прямая определяет направление
и величину усилия в полиспасте расчалки (Sp). Полученный построением угол b
является минимально допустимым для подъема груза G2.
= G2 + 0,1g, Sсб2 -
усилие в сбегающей нитке грузового полиспаста. Эта прямая определяет направление
и величину усилия в полиспасте расчалки (Sp). Полученный построением угол b
является минимально допустимым для подъема груза G2.
Величину расчетного усилия в ветвях расчалки определяют графическим или аналитическим способами при расположении горизонтальной проекции оси стрелы на биссектрисе угла между ветвями неманевренной расчалки и на биссектрисе центрального угла сектора обслуживания (т.е. для ветвей расчалки, расположенных симметрично относительно оси стрелы), для маневренной системы расчаливания
![]() (13)
(13)
При использовании двухветвевой расчалки усилие в одной ее ветви
![]() (14)
(14)
где 2y - угол между ветвями неманевренной расчалки или центральный угол сектора обслуживания при маневренной расчалке, град.
Величину центрального угла y сектора обслуживания определяют из формулы
2y = arctg![]() град, (15)
град, (15)
где a - расстояние между центрами якорей ветвей расчалки, м;
b - расстояние от оси вращения платформы крана до линии, соединяющей центры якорей ветвей расчалки, м.
Натяжение ветвей расчалки при повороте платформы крана с маневренной расчаленной стрелой в секторе обслуживания изменяется по закону:
![]() , (16)
, (16)
![]()
где Sa - натяжение ветви расчалки, в сторону которой производится поворот платформы крана, тс;
Sb - натяжение ветви расчалки, от которой происходит поворот платформы, тc;
j - угол поворота платформы крана от биссектрисы центрального угла сектора обслуживания, град.
Величины Sa и Sb определяют расчетным путем для всех значений угла поворота платформы крана (j) в секторе обслуживания с интервалом j = 5 + 10°.
Канаты и полиспасты ветвей расчалки подбирают по максимальным значениям величин Sa и Sb.
Длину каната каждой из ветвей маневренной системы расчаливания определяют по формуле
![]() м, (17)
м, (17)
где к - количество ниток каната в ветви расчалки, шт.;
q - угол, образованный горизонтальной плоскостью и плоскостью системы расчаливания, град;
q = 90-(b + g);
ln - длина полиспаста ветви расчалки, м;
n - кратность полиспаста ветви расчалки;
m - запас на привязку, принимаемый 10-12 м.
Длину одноветвевой расчалки крана с неманевренной стрелой определяют графическим построением или из уравнения
![]() м. (18)
м. (18)
Длина двухветвевой расчалки
![]() м. (19)
м. (19)
где h - отметка установки корня стрелы, м;
m - запас на привязку, принимаемый 10-12 м;
q - угол наклона расчалки к горизонту, град.
Устойчивость крана от сдвига горизонтальной силой, возникающей при отключении стрелоподдерживающей системы, в направлении расчалки проверяют из условия обеспечения необходимого коэффициента трения между гусеницами крана и опорной поверхностью.
f³![]() (20)
(20)
где f - необходимый коэффициент трения между гусеницами крана и опорной поверхностью (величины расчетных коэффициентов сухого трения для различных соприкасающихся поверхностей приведены в табл. 2);
h - коэффициент запаса (h = 2);
Gкр - масса крана, т;
S - сжимающее стрелу усилие при работе крана с расчаленной стрелой, определяемое графический построением или по формуле
![]() тс (21)
тс (21)
Устойчивость крана от сдвига обеспечивается в случае, если фактический коэффициент трения будет не менее определенного по формуле (20).
Таблица 2
Коэффициент трения для различных соприкасающихся поверхностей
|
Коэффициент трения |
|
|
1 |
2 |
|
Дерево по дереву |
0,4 |
|
Дерево по грунту |
0,5 |
|
Дерево по бетону |
0,5-0,6 |
|
Дерево по стали |
0,6 |
|
Сухой песок по стали |
0,5 |
|
Сухой песок по бетону |
0,7 |
|
Влажный песок по бетону |
0,65 |
|
Влажный песок по стали |
0,4 |
|
Песок, насыщенный водой, по стали |
0,35 |
|
Песок, насыщенный водой, по бетону |
0,45 |
|
Сталь по бетону |
0,35-0,45 |
|
Сталь по стали |
0,15-0,20 |
|
Сталь по льду |
0,027 |
Приложение 4
ПАРАМЕТРЫ РИГЕЛЕЙ ДЛЯ КРАНОВ МОДЕЛЕЙ МКГ И СКГ
|
Модель крана |
Основные размеры, мм |
Масса ригеля, кг |
Количество секций, шт. |
||
|
В |
К |
диаметр трубы |
|||
|
МКГ-20* |
4000 |
600 |
273x10 |
349 |
2 |
|
6000 |
600 |
273х10 |
493 |
3 |
|
|
МКГ-25 |
8000 |
600 |
273х10 |
637 |
4 |
|
10000 |
600 |
273х10 |
781 |
5 |
|
|
СКГ-30** |
4000 |
580 |
273х10 |
460 |
2 |
|
СКГ-40 |
6000 |
580 |
273х10 |
600 |
3 |
|
8000 |
580 |
273х10 |
740 |
4 |
|
*Чертежи № 1207.00.00.000 ВНИИМонтажспецстроя.
**Чертежи № 1574.00.00.00 ВНИИМонтажспецстроя.
Приложение 5
ПАРАМЕТРЫ ШЕВРОВ ДЛЯ ОПИРАНИЯ СТРЕЛ КРАНОВ МКГ И СКГ
|
Модель крана |
Осевая нагрузка на шевр, тс |
Основные размеры, мм |
Масса шевра, кг |
|||||
|
H |
d |
b |
диаметр трубы |
K |
C |
|||
|
МКГ-25* |
25 |
34170 |
1450 |
6150 |
426х10 |
620 |
600 |
8650 |
|
24170 |
1450 |
4756 |
426х10 |
620 |
600 |
6650 |
||
|
СКГ-30** СКГ-40** |
50 |
26550 |
1450 |
5000 |
426х10 |
590 |
1700 |
6770 |
*Чертежи № 1224.00.00.000 ВНИИМонтажспецстроя.
**Чертежи № 1481.00.00.000 ВНИИМонтажспецстроя.
Приложение 6
ПРИМЕР РАСЧЕТА УСИЛИЙ В СТРЕЛЕ, ШЕВРЕ И СТРЕЛОВОМ ПОЛИСПАСТЕ ПРИ ПОДЪЕМЕ АППАРАТА КРАНАМИ С ОПИРАЮЩИМИСЯ СТРЕЛАМИ
При разработке технологических карт и схем на подъем оборудования кранами СКГ-30 (СКГ-40) с опирающимися стрелами для определения усилий, возникающих в стреле крана, в шевре и в стреловом полиспасте, следует пользоваться графиками, приведенными на рис. 48, 49 и 50.
Рис. 48. График зависимости усилий в стреле (N стр.) от вылета крюка крана СКГ-30 (СКГ-40) при различных углах отклонения (b) грузового полиспаста от вертикали в плоскости стрелы.
Ключ a® b® Q® Nстр
Например, при угле наклона стрелы a = 60° и максимальном угле отклонения грузового полиспаста b = 9° осевое усилие в стреле Nстр составит 0,31Q, или 9,3 тс от усилия в грузовом полиспасте Q = 30 тс. Допустимое максимальное осевое усилие на минимальном вылете для стрелы составляет 77 тс
Рис. 49. График зависимости усилий в шевре (Nш) от вылета крюка крана СКГ-30 (СКГ-40) при различных углах отклонения (b) грузового полиспаста от вертикали в плоскости стрелы.
Ключ a®b®Q®Nш
Например, при угле наклона стрелы a = 60° и максимальном угле отклонения грузового полиспаста b = 9° осевое усилие в шевре (от усилия в грузовом полиспасте Q = 30 тc) составит 1,254Q или 37,7 тс. Допустимое максимальное осевое усилие в шевре 50 тс
Рис. 50. График изменения натяжения стрелового полиспаста (Nп) в зависимости от сжимающего усилия в стреле (Nстр) крана СКГ-30 (СКГ-40) и вылета крюка
Ключ a®Nстр®Nп
Например, при угле наклона стрелы a = 60° осевом усилии в стреле 9,3 тс (см. рис. 48) в стреловой полиспасте крана при оборудовании его стрелой L = 25 м усилие составит 9,3×1,1,27 = 11,8 тс. Максимальное допустимое усилие в стреловом полиспасте 30 тс
Исходные данные: длина стрелы l = 25 м;
подъем на минимальном вылете крюка (угол наклона стрелы a = 75°);
угол отклонения грузового полиспаста в плоскости стрелы b = 3°.
Требуется определить возможность подъема скольжением вертикального аппарата массой 80 т двумя кранами СКГ-30 с опирающимися стрелами.
Усилие Q в грузовом полиспасте каждого крана
составит ![]() = 40 тс.
= 40 тс.
Из графика на рис. 48 определяем осевое усилие в стреле
Nстр = 0,2×Q = 0,2×40 = 8 тс,
что меньше допустимого (77 тс).
Из графика на рис. 49 определяем осевое усилие в шевре
Nш = 1,2×Q = 1,2×40 = 48 тс,
что меньше максимального допустимого (50 тс).
Из графика на рис. 50 определяем натяжение в стреловом полиспасте
Nп = 1,55×Nстр = 1,55×8 = 12,4 тс,
что меньше допустимого (30 тс).
Таким образом, аппарат массой 80 т может быть поднят двумя кранами СКГ-30 с опирающимися стрелами длиной 25 м.
Приложение 7
БАЛАНСИРНЫЕ УСТРОЙСТВА
При подъеме спаренными кранами аппарата строповке за его головную часть следует применять:
а) траверсы из двутавров (рис. 51 и таблица)

Рис. 51. Балансирная траверса из двутавров
Основные параметры траверс
|
Грузоподъемность* траверсы, т |
Тип траверс |
Соотношение плеч |
Конструктивные особенности |
Основные размеры, мм |
Масса (приблизительная), кг |
||||
|
a |
b |
c |
d |
e |
|||||
|
30 |
Симметричная |
1:1 |
Из одного двутавра |
4000 |
550 |
180 |
2000 |
2000 |
450 |
|
3000 |
500 |
170 |
1500 |
1500 |
300 |
||||
|
2000 |
450 |
160 |
1000 |
1000 |
180 |
||||
|
Несимметричная |
1:2 |
|
4000 |
550 |
180 |
2650 |
1850 |
450 |
|
|
3000 |
500 |
170 |
2000 |
1000 |
300 |
||||
|
2000 |
450 |
160 |
1350 |
650 |
180 |
||||
|
40 |
Симметричная |
1:1 |
|
4000 |
650 |
200 |
2000 |
2000 |
660 |
|
3000 |
550 |
180 |
1500 |
1500 |
350 |
||||
|
2000 |
500 |
170 |
1000 |
1000 |
230 |
||||
|
Несимметричная |
1:2 |
|
4000 |
650 |
200 |
2650 |
1350 |
600 |
|
|
3000 |
550 |
180 |
2000 |
1000 |
350 |
||||
|
2000 |
500 |
170 |
1350 |
650 |
230 |
||||
|
60 |
Симметричная |
1:1 |
Из двух двутавров |
4000 |
550 |
492 |
2000 |
2000 |
900 |
|
Из одного двутавра |
3000 |
650 |
200 |
1500 |
1500 |
500 |
|||
|
2000 |
550 |
180 |
1000 |
1000 |
300 |
||||
|
Несимметричная |
1:2 |
Из двух двутавров |
4000 |
550 |
492 |
2650 |
1350 |
900 |
|
|
Из одного двутавра |
3000 |
650 |
200 |
2000 |
1000 |
500 |
|||
|
2000 |
550 |
180 |
1350 |
650 |
300 |
||||
*При необходимости подъема аппаратов массой больше 60 т в соответствии с ППР должны быть спроектированы балансирные траверсы большей грузоподъемности.
б) траверсы из труб, усиленных ребрами жесткости, могут быть применены на подъеме аппаратов методом скольжения и поворота вокруг шарнира.
Для подъемов аппаратов методом поворота вокруг шарнира можно использовать траверсы с креплением к аппарату сверху (рис. 51) и снизу (рис. 52, 53, 54). Балансирные траверсы с кроплением к аппарату снизу позволяют за счет увеличения высоты подъема аппарата краном снизить грузоподъемность дотягивающей системы и якоря на 15 %.

Рис. 52. Балансирная траверса грузоподъемностью 60 т конструкции Рязанского монтажного управления треста № 7 для подъема аппаратов методом поворота:
1 - ригель траверсы; 2 - аппарат
Рис. 53. Балансирная съемная траверса конструкции Рязанского монтажного управления треста №7 Главнефтемонтажа для крепления к аппарату снизу:
1 - продольный ригель; 2 - строп; 3 - траверса. Общая масса 3,2 т, предельный угол подъема аппарата 45°

Рис. 54. Балансирная траверса с шаровым шарниром (чертеж ПИ Промстальконструкция)
С помощью траверсы (рис. 52) можно поднимать аппараты методом поворота вокруг шарнира до вертикального положения. Траверсы (рис. 53, 54) могут быть применены только при подъеме аппаратов методом поворота вокруг шарнира с последующим дотягиванием до вертикального положения дополнительными средствами.