ОТКРЫТОЕ АКЦИОНЕРНОЕ ОБЩЕСТВО "ГАЗПРОМ"
ОБЩЕСТВО С ОГРАНИЧЕННОЙ ОТВЕТСТВЕННОСТЬЮ
«Научно-исследовательский институт природных газов и газовых технологий -
ВНИИГАЗ»
Система нормативных документов в газовой промышленности
ВЕДОМСТВЕННЫЙ РУКОВОДЯЩИЙ ДОКУМЕНТ
МЕТОДИЧЕСКИЕ УКАЗАНИЯ
ПО ВЫБОРУ И ПРИМЕНЕНИЮ АСИНХРОННОГО
ЧАСТОТНО-РЕГУЛИРУЕМОГО ЭЛЕКТРОПРИВОДА
МОЩНОСТЬЮ ДО 500 кВТ
ВРД 39-1.10-052-2001
Дата введения 22.11.2001 г.
Предисловие
РАЗРАБОТАН Обществом с ограниченной ответственностью «Научно-исследовательский институт природных газов и газовых технологий - ВНИИГАЗ», Управлением энергетики ОАО "ГАЗПРОМ"
СОГЛАСОВАН Начальником Управления энергетики ОАО «ГАЗПРОМ» Г.Р. Шварцем 21.11.2001 г.
ВНЕСЕН Управлением энергетики ОАО «ГАЗПРОМ»
УТВЕРЖДЕН Членом Правления ОАО «ГАЗПРОМ» Б.В. Будзуляком 22.11.2001 г.
ВВЕДЕН В ДЕЙСТВИЕ 22.11.2001 г.
ВВОДИТСЯ ВПЕРВЫЕ
ИЗДАН Обществом с ограниченной ответственностью «Научно-исследовательский институт природных газов и газовых технологий - ВНИИГАЗ»
ВВЕДЕНИЕ
Настоящее Руководство разработано для применения производственными, проектными и научными организациями ОАО «Газпром» при проектировании строящихся и техническом перевооружении существующих объектов, оснащаемых частотно-регулируемым асинхронным электроприводом мощностью до 500 кВт, с целью повышения эффективности технологических процессов в газовой промышленности. В ведомственном руководящем документе «Методические указания по выбору и применению асинхронного частотно-регулируемого электропривода мощностью до 500 кВт» изложены основные требования и расчетные соотношения по выбору и применению частотно-регулируемого асинхронного электропривода, его составных элементов и устройств.
Руководство разработано коллективом сотрудников ООО «ВНИИГАЗ». Разработчики: Комягин А.Ф., главный научный сотрудник, д.т.н., академик АГН, Штин Е.А., ведущий инженер. Руководитель разработки: Медведев В.А., начальник лаборатории комплексных систем электропривода в технологических процессах, ООО «ВНИИГАЗ».
В разработке принимали участие представители Управления энергетики ОАО «ГАЗПРОМ»: Лезнов В.Б., зам. начальника отдела; Матвейчук П.А., главный технолог, к.т.н.
1 ОБЛАСТЬ ПРИМЕНЕНИЯ И ОБЩИЕ ПОЛОЖЕНИЯ
1.1 Область применения
Одной из тенденций в области энергосберегающих технологий последних лет является применение частотно-регулируемых приводов на основе асинхронных короткозамкнутых электродвигателей и полупроводниковых преобразователей частоты, снижающих потребление электрической энергии, повышающих степень автоматизации, удобство эксплуатации оборудования и качество технологических процессов. На производственных объектах газовой промышленности установлены десятки тысяч асинхронных электродвигателей мощностью до 500 кВт и напряжением до 1000 В. Они используются в качестве приводов вспомогательных устройств, обслуживающих основное технологические оборудование и производственные процессы, в основном это вентиляторы и насосы.
Существуют различные способы управления производительностью вентиляторов и насосов: дросселирование нагрузки, снижение единичной мощности агрегатов и увеличение их количества и т.д. Наиболее эффективным способом является регулирование скорости вращения. Применение частотно-регулируемого привода на насосах и вентиляторах позволяет обеспечить снижение потребляемой мощности на 5 ¸ 30 % за счет исключения в водяных и воздушных трактах дросселей и заслонок, а также улучшения технологических процессов. Наряду с этим частотно-регулируемый привод дает ряд дополнительных преимуществ:
- экономию тепла в системах горячего водоснабжения за счет снижения потерь воды, несущей тепло;
- возможность создавать при необходимости напор выше номинального;
- уменьшение износа основного оборудования за счет плавных пусков, устранение гидравлических ударов, снижение напора;
- снижение шума;
- возможность комплексной автоматизации систем;
- возможность оптимизации выбора оборудования и его комплектной поставки.
1.2 Общие положения
Структурная схема частотно-регулируемого привода с его составными элементами и преобразователем приведена на рис. 1.

Рис. 1 Структурная схема частотно-регулируемого привода
1 - кабель сети, 2 -
сетевые предохранители, 3 - автоматический выключатель, 4 - сетевой дроссель,
5 - фильтр радиопомех, 6 - преобразователь частоты, 7 - тормозной резистор, 8 -
синус (L-R-C) фильтр,
9 - тепловое реле, 10 - кабель двигателя, 11 - асинхронный двигатель с
короткозамкнутым ротором,
12 - заземление
Как видно из рисунка, частотно-регулируемый привод нужно рассматривать в совокупности с источником электроснабжения, коммутационными аппаратами, кабелями сети, кабелями двигателя, кабелями управления, фильтрами, заземлением, дополнительными устройствами, электродвигателем, преобразователем частоты, а также условиями их монтажа на объекте и режимами работы всего оборудования.
В ведомственном руководящем документе «Методические указания по выбору и применению асинхронного частотно-регулируемого электропривода мощностью до 500 кВт» изложены основные требования и расчетные соотношения по выбору параметров частотно-регулируемого асинхронного электропривода, его составных элементов и устройств. Эти требования и расчеты дополняют ГОСТ 24607-88 «Преобразователи частоты полупроводниковые. Общие технические требования» в части применения его на объектах ОАО «Газпром». Дополнительные рекомендации основываются на российских и приведенных в справочном Приложении А зарубежных стандартах и нормах.
1.3 Нормативные ссылки
В настоящем ВРД сделаны ссылки на следующие стандарты:
- ГОСТ 13109-97 «Нормы качества электрической энергии в системах электроснабжения общего назначения»;
- ГОСТ 24607-88 «Преобразователи частоты полупроводниковые. Общие технические требования»;
- ГОСТ 26567-85 «Преобразователи частоты полупроводниковые. Методы испытаний»;
- Международные и национальные стандарты стран, регламентирующие применение частотно-регулируемого асинхронного электропривода (приведены в справочном Приложении А).
2 ВЫБОР И СОГЛАСОВАНИЕ ПАРАМЕТРОВ ЧАСТОТНО-РЕГУЛИРУЕМОГО АСИНХРОННОГО ЭЛЕКТРОПРИВОДА
В составе частотно-регулируемого асинхронного электропривода выбор и согласование параметров преобразователя частоты и асинхронного короткозамкнутого двигателя является главным вопросом.
Для выбора двигателя и преобразователя частоты нужно учитывать следующие параметры [1]:
- диапазон регулирования частоты вращения двигателя (для определения числа полюсов двигателя и номинальной частоты вращения двигателя);
- нагрузочную характеристику (она определяет ограничения, связанные с охлаждением двигателя и выходом в зону ослабленного поля, т.е. на частоту вращения ротора двигателя выше его номинальной по техническим условиям на двигатель);
- требуемый крутящий момент двигателя (он требуется для определения мощности двигателя);
- тип и мощность преобразователя частоты, учитывая следующие особенности:
- управление одним двигателем или группой;
- двигатель погружной;
- двигатель взрывозащищенный;
- двигатель двухскоростной.
Выбор преобразователя частоты и двигателя для вентилятора/насоса сводится к выполнению алгоритма, представленного на рис. 2. Алгоритмы описываются ниже приведенными формулами.
Расчет требуемого крутящего момента на валу двигателя
|
|
(2.1) |
|
|
(2.2) |
где РН - мощность нагрузки в кВт;
N - число оборотов двигателя, об/мин;
ТН - крутящий момент на валу двигателя, (н·м) или (кгс·м).
Необходимо проверять мощность на валу с учетом момента нагрузки и условий окружающей среды. Обычно когда температура уменьшается, мощность на валу увеличивается [2].
Предварительный выбор двигателя/преобразователя на основе данных и расчетов
а) Выбор мощности двигателя: РДВ. > РНАГРУЗКИ, (кВт).
Мощность двигателя должна быть больше мощности нагрузки.
б) Выбор мощности преобразователя частоты.
Мощность преобразователя частоты выбирается так, чтобы номинальный ток двигателя (IДВ) был меньше или равен току на выходе преобразователя частоты (IПЧ)
IПЧ ³ IДВ, А.
Расчет момента инерции
JB - момент инерции вентилятора (кг·м2)
берется из Технических условий завода-изготовителя; G![]() - эффект маховика (кгс·м); J
= 1/4GD2;
- эффект маховика (кгс·м); J
= 1/4GD2;
JДВ - момент инерции двигателя (кг·м2) берется из Технических условий завода-изготовителя.
Суммарный момент инерции равен
|
|
(2.3) |
Примечание. Когда между двигателем и вентилятором передача крутящего момента осуществляется через шкив и ремень необходимо учитывать момент инерции шкива и проскальзывание ремня.
Проверка времени ускорения
|
|
(2.4) |
|
|
(2.5) |
где ta, t'a - время ускорения, сек;
SJ - суммарный момент инерции, кг∙м2;
SGD2 - суммарный эффект маховика, кгс∙м2;
DN - изменение числа оборотов (об/мин) за период времени ta;
ТДВ - номинальный крутящий момент двигателя (Н∙м) или Т'ДВ (кгс∙м);
ТН - момент нагрузки (Н∙м) или Т'Н (кгс∙м);
a - коэффициент коррекции момента при управлении от преобразователя частоты (1,2 ¸ 1,3);
b - корректирующий коэффициент, учитывающий уменьшенный крутящий момент двигателя (13, для постоянного момента 1).
Проверка времени замедления
|
|
(2.6) |
|
|
(2.7) |
где c - коэффициент, корректирующий момент двигателя (0,1 - 0,3), зависит от КПД двигателя.
Если необходимо замедлиться за время внутри периода замедления tв, t'в, необходимо применять тормозной модуль.
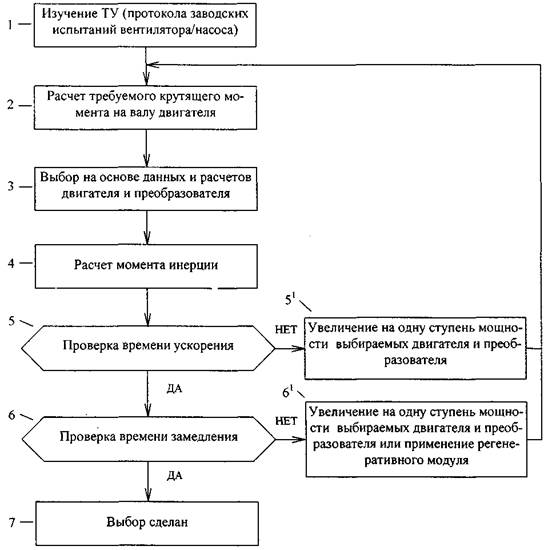
Рис. 2 Схема алгоритма выбора преобразователя частоты
и двигателя для вентилятора/насоса
3 КЛАССИФИКАЦИЯ ЭЛЕКТРОДВИГАТЕЛЕЙ, ПРИМЕНЯЕМЫХ В СОСТАВЕ ЧАСТОТНО-РЕГУЛИРУЕМОГО ЭЛЕКТРОПРИВОДА
Асинхронные электродвигатели, применяемые в составе частотно-регулируемого электропривода, представлены в таблице 3.1 [3].
Таблица 3.1 - Классификация электродвигателей
|
Типы электродвигателей |
Дополнительная информация |
|
Стандартный асинхронный короткозамкнутый, самовентилируемый (1LA) |
Вращательный момент двигателя в диапазоне от 3 до 8000 Н·м. Частота вращения от 750 до 3000 об/мин |
|
Стандартный асинхронный короткозамкнутый с принудительной вентиляцией (1PQ) |
Высота оси вращения от 71 до 315 мм |
|
Асинхронный короткозамкнутый, взрывозащищенный (1MJ) типа ВАО, ВАСО, ДАЛ |
Напряжение 380, 3000, 3300, 6000, 6600 В. Частота вращения 1500, 3000, 3600 об/мин |
|
Асинхронный погружной типа ПЭД, ПЭДВ, ПЭДП, ДПТВ, ПЭДУ |
Рассчитан для продолжительной непрерывной работы в агрессивных условиях при высокой температуре и давлении |
3.1 Дополнительные требования к стандартному асинхронному короткозамкнутому самовентилируемому электродвигателю (1LA) при управлении от преобразователя частоты
Стандартные асинхронные короткозамкнутые самовентилируемые электродвигатели (АД) наиболее распространены в промышленности. Это обусловлено простотой их конструкции, очень высокой надежностью в эксплуатации, стандартизацией и высоким коэффициентом полезного действия. АД позволяют вносить изменения в конструкцию для удовлетворения специальному применению и различным условиям среды. Фактически они имеют только два недостатка: большой пусковой ток (5 ¸ 7 Iном.) и ограниченные возможности регулирования частоты вращения.
Асинхронный двигатель общего применения сконструирован так, что оптимальная плотность электромагнитного потока у него при номинале питающего напряжения 200 В и частоте 50 Гц. Когда изменяется частота, необходимо в то же самое время и изменять напряжение питания электродвигателя. Это необходимо в случае поддержания постоянной величины скольжения. При таких условиях управление АД с изменением частоты вращения называется управлением с постоянным соотношением напряжения к частоте U/f.
Соотношение U/f - Линейное. Напряжение на двигателе растет линейно с увеличением частоты двигателя. Номинальное напряжение подается на двигатель при номинальной частоте. Линейное соотношение U/f следует использовать в электроприводах с постоянным моментом на валу (не зависящим от скорости рабочего органа).
Соотношение U/f - Квадратичное. Напряжение двигателя изменяется по квадратичной зависимости по мере возрастания частоты от 0 Гц до номинальной частоты двигателя. При этом на двигатель подается номинальное напряжение при номинальной частоте. Двигатель работает с уменьшенным магнитным потоком на частотах ниже номинальной. Он имеет меньший критический момент, чем при линейном соотношении U/f, и создает меньше шума. Квадратичное соотношение U/f используется для приводов, в которых требуемый момент пропорционален квадрату скорости. Таковыми являются центробежные вентиляторы и насосы.
Частота вращения двигателя при частотном управлении может значительно отличаться от номинальной. Допустимый максимум частоты вращения для стандартных двигателей соответствует их типоразмерам и приведен в таблице 3.2.
Таблица 3.2 - Типоразмеры и максимальная допустимая частота вращения стандартных асинхронных двигателей
|
Типоразмер (высота оси вращения, мм) |
Допустимый максимум частоты вращения, об/мин |
|
63 - 100 |
6000 |
|
112 - 200 |
4500 |
|
225 - 280 |
3600 |
|
315, 2 полюса |
3600 |
|
315, другие |
3000 |
|
355, 400, 2 полюса |
3600 |
|
355,400, другие |
2500 |
Выходные токи и напряжение преобразователя частоты в отличие от стандартной сети имеют не синусоидальную форму, а пики, высшие гармоники тока и напряжения, быстрое изменение частоты и напряжения во времени. Это приводит к увеличению напряжения на изоляции двигателя, увеличиваются потери двигателя, его вибрация и шум [4]. Так как техническим условием завода-изготовителя не предусматриваются испытания стандартного асинхронного двигателя при питании его от преобразователя частоты, появляется необходимость в проведении дополнительных проверок двигателя. Международным электротехническим комитетом, в состав которого входит Российская Федерация, принят стандарт МЭК 34-17 «Асинхронные двигатели с короткозамкнутым ротором, питаемые от преобразователей частоты». Первая редакция стандарта была выпущена в 1992 году, вторая в 1998 году. В первой редакции МЭК 34-17 в целях исключения негативных воздействий на двигатель, питаемый от преобразователя частоты, были введены дополнительные проверки, которые состоят из трех групп:
• 1 группа - Общая проверка двигателя при питании от преобразователя частоты;
• 2 группа - Проверка двигателя при частоте вращения ротора выше номинальной (при питании от преобразователя частоты);
• 3 третья группа - Проверка двигателя при частоте вращения ротора ниже номинальной (при питании от преобразователя частоты).
Проверки должны производиться на заводе-изготовителе электродвигателя или поставщика преобразователей частоты по требованию заказчика.
Состав проверок приведен на рис. 3.

Рис. 3 Схема проверок двигателя при управлении от преобразователя частоты
Общая проверка двигателя
Нагрузочная способность
Различные типы преобразователей частоты, отличающиеся рабочими принципами, способами модуляции и коммутации частоты, дают разброс эффективности для одного и того же двигателя [4]. В теоретических вычислениях и лабораторных испытаниях определено, что непрерывная максимальная нагрузка (вращательный момент) привода с преобразователями частоты зависит в основном от способа модуляции и частоты переключений преобразователя частоты.
Основной принцип работы двигателя при питании от преобразователя частоты заключается в том, что максимально допустимый момент нагрузки двигателя как функция частоты вращения его ротора должен давать такой же рост температуры двигателя, как при питании синусоидальным напряжением номинальной частоты при номинальной нагрузке [4]. Этот рост температуры, как правило, соответствует классу изоляции В.
Увеличения нагрузочной способности двигателя можно достичь:
- повышением эффективности охлаждения;
- фильтрацией выходного напряжения преобразователя частоты;
- специальной конструкцией ротора.
Уровень изоляции
В преобразователе частоты с широтно-импульсной модуляцией (ШИМ) выходное напряжение (или ток) представляет собой ряд импульсов, а кабель между преобразователем частоты и двигателем может иметь протяженность 100 м и более. Если волновое сопротивление кабеля и обмотки двигателя не согласованы, происходит отражение волны напряжения в оба конца кабеля. Это отражение увеличивает пики напряжения на клеммах двигателя, а также в обмотке статора и может привести к пробою изоляции. Для защиты от этого негативного явления необходимо соблюдать следующие рекомендации [4]:
- если поминальное напряжение питания сети 415 В или меньше, усиление изоляции асинхронного двигателя не требуется;
- если номинальное напряжение питания сети 660 - 690 В, требуется усиление изоляции двигателя;
- если номинальное напряжение питания сети в интервале 440 ¸ 575 В, необходимо дополнительно учитывать длину кабеля между преобразователем частоты и двигателем, а также выходную мощность двигателя.
Существует ряд специальных мер для уменьшения перенапряжения в обмотках двигателя:
- установка фильтров на выходе преобразователя частоты;
- использование специальных «демпфирующих» (увеличивающих затухание отраженной волны напряжения) кабелей;
- применение ограничителей напряжения на клеммах двигателя.
Заземление
Правильная установка заземления очень важна вообще, но в приводе с преобразователем частоты ему должно быть уделено специальное внимание, чтобы гарантировать:
- работу всех защитных устройств и реле;
- минимальный или допустимый уровень электромагнитной помехи;
- допустимый уровень несущего напряжения, чтобы избежать токов, приводящих к повреждениям (отказам).
Необходимо учитывать, что в приводе с частотным преобразователем сумма напряжений фаз никогда не равна нулю. Это становится причиной трудности сохранения на корпусе двигателя нулевого потенциала. Емкостные напряжения и токи в случае плохого заземления статора могут воздействовать на питающее напряжение и вывести из строя оборудование.
Проверка двигателя при частоте вращения выше номинальной
Максимальный вращательный момент
В точке ослабления поля (наивысшая точка, где соотношение изменений U/f позволяет сохранять постоянным магнитный поток, называется точкой ослабления поля) с увеличением частоты вращения ротора магнитный поток двигателя и способность создавать вращательный момент уменьшаются в соответствии с зависимостью М ~ 1/f2. Поэтому на практике максимальный вращательный момент двигателя должен быть на 40 % выше, чем момент сопротивления нагрузки для обеспечения процессов ускорения и торможения двигателя.
При использовании фильтров или дополнительных
реактивных сопротивлений для улучшения параметров выходного напряжения и тока
преобразователя частоты (приближения их к синусоидальной форме) необходимо
обращать внимание на падение величины питающего напряжения двигателя при
максимальном токе нагрузки. Падение напряжения должно быть не более 3 ¸ 7 %. Это обусловлено тем, что максимальный момент
асинхронного двигателя пропорционален квадрату величины питающего напряжения.
Для устойчивой работы асинхронного двигателя и производственного механизма
необходимо определенное сочетание механических характеристик двигателя М(n)
и нагрузки Мс(n). Двигатель устойчиво работает, когда ![]() [5].
[5].
Конструкция подшипников
При проверке подшипников необходимо учитывать, что имеется предел частоты вращения, с которой вращается подшипник. Тип подшипника, размер, внутренняя конструкция, нагрузка и условия охлаждения, точность изготовления, внутренний клиренс определяют возможную максимальную частоту вращения.
Смазка
Тип смазки определяется режимом работы (эксплуатации) двигателя. Используя специальные смазочные материалы, можно увеличить максимальную частоту вращения, уменьшить трение и выделение тепла.
Шум вентилятора
Шум, вызываемый вентилятором двигателя, увеличивается с частотой вращения двигателя и становится доминирующим для 2-х и 4-х полюсных двигателей уже при частоте 50 Гц. Если частота вращения в дальнейшем увеличится, то и уровень шума будет выше. Увеличение уровня шума может быть вычислено по формуле:
|
|
(3.1) |
где DL - увеличение уровня звукового давления, когда частота вращения изменяется в сторону увеличения от n1 к n2, dB (A);
n1 и n2 - частоты вращения двигателя, об/мин.
Удвоение частоты вращения дает приблизительно 20 dB (A) уровня шума.
Шум вентилятора - это обычно так называемый «белый шум», содержащий все частоты слышимого диапазона.
Для уменьшения шума вентилятора применяется несколько методов:
- изменение конструкции вентилятора и его кожуха (уменьшение внешнего диаметра);
- использование специального вентилятора, осевой конструкции (одно направление вращения);
- использование глушителя для уменьшения всех компонентов шума.
Балансировка
Должны быть проверены точность балансировки и механическая напряженность всех вращающихся частей, включая муфты или шкивы.
Критическая скорость
Не должна превышаться 1-я критическая частота вращения стандартного двигателя даже в случае жесткого соединения с нагрузкой на валу. Гарантийный резерв должен быть равен 25 % от критической частоты вращения. При невыполнении этого условия значения виброскорости могут выйти за установленные нормы и вызвать повышенный износ подшипников двигателя или его аварийный останов.
Уплотнение вала
При эксплуатации двигателя на частоте вращения выше номинальной, уплотнение вала требует специального внимания (V - образные кольца, масляные уплотнения, герметичный подшипник и т.д.). Уплотнения имеют предел частоты вращения, который не рекомендуется превышать. В особых случаях используются лабиринтные уплотнения без трения.
Проверка двигателя при частоте вращения ниже номинальной
Смазка
При уменьшении частоты вращения ротора асинхронного короткозамкнутого самовентилируемого двигателя ниже номинальной, производительность вентилятора, закрепленного на роторе, также уменьшается, что значительно ухудшает условия охлаждения двигателя и может привести к повышению температуры обмоток статора и подшипников до предельно допустимых значений. При увеличении значения температуры выше номинального на каждые 15 °С интервал времени замены смазки должен уменьшаться в два раза. Если уменьшение интервалов невозможно, то рекомендуется использование высокотемпературных смазок с противозадирными присадками. При очень низких частотах вращения ротора двигателя невозможно создать масляную пленку между катящимися элементами и поверхностью качения. Это создает путь для электрического тока между шариками и несущими кольцами подшипника.
Охлаждение
Поток воздуха и охлаждающая мощность зависят от частоты вращения вентилятора. Чтобы увеличить охлаждающую мощность двигателя при низкой частоте вращения, может быть использован отдельный вентилятор с постоянной максимальной частотой вращения.
Электромагнитный шум
Гармонические компоненты напряжения преобразователя частоты увеличивают уровень магнитного шума двигателя. Частотный диапазон магнитных силовых волн, созданный в двигателе при питании от преобразователя частоты, настолько широк, что возможно возникновение резонанса в двигателе.
Типичная характеристика магнитного шума, вызванного частотным преобразователем - это частотный спектр, содержащий некоторые доминирующие частоты, которые изменяются с базисной частотой и частотами переключения, формируя частоты помех основным волнам.
Наилучший способ уменьшения составляющих магнитного шума:
• увеличение частоты переключения, дающей более высокие гармоники и меньшие амплитуды, чем чувствительность человеческого уха;
• фильтрация гармонических составляющих на выходе преобразователя или использование дополнительных сопротивлений;
• шумоподавитель двигателя;
• отдельная система охлаждения с «белым» вентиляторным шумом, которая покрывает магнитный шум.
4 НАГРУЗОЧНЫЕ ХАРАКТЕРИСТИКИ ЭЛЕКТРОПРИВОДА
Момент сопротивления механизма характеризуется начальным статическим моментом при трогании с места и характером изменения момента сопротивления в зависимости от скорости.
В общем виде для большинства вращающихся механизмов момент сопротивления Мс выражается формулой
|
|
(4.1) |
где Мс.нач - начальный момент сопротивления вращающегося механизма (без учета момента трения покоя), н·м.;
Мс.н - номинальный момент сопротивления механизма, н∙м;
Р - показатель степени;
n - режимная частота вращения;
nН - номинальная частота вращения, об/мин.
При Р = 0 момент сопротивления не зависит от частоты вращения, при Р = 2 момент сопротивления механизма вентиляторного типа изменяется пропорционально квадрату частоты вращения (числу оборотов в минуту).
Для того, чтобы сдвинуть механизм с места, нужно преодолеть момент трения покоя в подшипниках (начальный статический момент). Этот начальный момент сопротивления при трогании механизма необходимо знать для правильного выбора двигателя. Начальный момент двигателя должен быть выше начального статического момента сопротивления агрегата, иначе двигатель не сможет тронуться с места.
Начальные статические моменты по данным [5] составляют:
- для вентиляторов, дымососов и центробежных насосов от 0,05 до 0,36 номинального момента сопротивления;
- для поршневых компрессоров от 0,13 до 0,36 номинального момента сопротивления;
- для турбокомпрессоров 0,13 номинального момента сопротивления.
Момент сопротивления центробежных насосов в зависимости от величины статического давления (высоты подачи или противодавления) изменяется пропорционально частоте вращения во второй или более высокой степени.
В газовой промышленности обычно применяются механизмы, у которых момент сопротивления на вале электропривода пропорционален квадрату частоты его вращения. Примером таких механизмов являются центробежные насосы и вентиляторы.
4.1 Настройка преобразователя частоты под характеристику нагрузочного момента
Минимальная частота, при которой напряжение двигателя достигает максимальной величины, называется базовой частотой.

Рис. 4 Зависимость напряжения двигателя от базовой частоты
Максимальная частота - это наибольшая возможная частота (50, 60, 120 или 400 Гц), которая может быть на выходе преобразователя частоты.
Оптимальная характеристика отношения напряжения к частоте (U/f) может быть выбрана в соответствии с характеристикой момента нагрузки [2].
Нагрузочная характеристика механизма с постоянным моментом сопротивления
Такую нагрузочную характеристику имеют различные транспортеры, шнеки, каландры, т.е. при изменении частоты вращения двигателя величина момента сопротивления механизма остается постоянной, равной номинальному значению.
Нагрузочная характеристика механизма с изменяющимся моментом сопротивления
Нагрузочная характеристика механизма с изменяющимся моментом сопротивления характерна для центробежных вентиляторов и насосов. Изменение момента сопротивления механизма пропорционально квадрату частоты вращения вала двигателя.
|
|
|
|
а) |
б) |


Рис. 5 Зависимость напряжения от частоты на выходе преобразователя при разном характере нагрузки
а) - нагрузка с
постоянным моментом сопротивления;
б) - нагрузка с изменяемым моментом сопротивления.
Кривые ускорения и замедления двигателя
Время, за которое достигается максимальная частота вращения двигателя при управлении двигателем по закону соотношения U/f, называется временем ускорения. Время от максимальной частоты вращения до остановки двигателя называется временем замедления.
Ускорение и замедление может осуществляться как по линейной зависимости, так и по S и U-образным кривым в зависимости от характера нагрузки.

Рис. 6 Типы ускорений и замедлений двигателя
L - линейное, S - образное и U - образное ускорение и замедление
5 ПОЛУПРОВОДНИКОВЫЕ ПРЕОБРАЗОВАТЕЛИ ЧАСТОТЫ. КЛАССИФИКАЦИЯ, ОТЛИЧИЯ, ЭЛЕМЕНТНАЯ БАЗА
Преобразователь частоты - силовой электронный прибор, который преобразует энергию переменного тока фиксированного напряжения и частоты в энергию с переменным напряжением и частотой [4].
Различают преобразователи частоты: с промежуточным звеном постоянного тока, с непосредственной связью питающей сети и цепи нагрузки (циклоконверторы), с промежуточным звеном переменного тока (циклоинверторы) [6]. На рис. 7 представлена схема классификации преобразователей частоты.
Для управления скоростью асинхронного короткозамкнутого электродвигателя широкое распространение получили преобразователи частоты с промежуточным звеном постоянного тока. Переменное напряжение питающей сети выпрямляется с помощью управляемого выпрямителя, фильтруется и подается на инвертор. Функции регулирования частоты выходного напряжения осуществляет инвертор, а напряжения - выпрямитель. Иногда обе функции осуществляет инвертор, а выпрямитель выполняется неуправляемым. Преобразователи с промежуточным звеном постоянного тока позволяют регулировать выходную частоту с помощью системы управления инвертора в широком диапазоне как вверх, так и вниз от частоты питающей сети.

Рис. 7 Классификация преобразователей частоты
|
ПЧ |
- преобразователь частоты; |
|
ПЧ ИТ |
- преобразователь частоты источник тока; |
|
ПЧ ИН |
- преобразователь частоты источник напряжения; |
|
ПЧ АИМ |
- преобразователь частоты с амплитудно-импульсной модуляцией; |
|
ПЧ ШИМ |
- преобразователь частоты с широтно-импульсной модуляцией |
Недостатком преобразователей с промежуточным звеном постоянного тока является двойное преобразование энергии, что приводит к уменьшению КПД. Однако такой тип преобразователя частоты и схема управления им проще, чем преобразователя с непосредственной связью.
Преобразователь частоты Источник Тока (ПЧ ИТ) - имеет промежуточное звено постоянного тока, выход которого представляет собой управляемые импульсы тока, переменной частоты, которые подаются на различные фазы трехфазной системы. Этот преобразователь имеет большой импеданс и работает, как источник тока для двигателя [2].
Преобразователь частоты Источник Напряжения (ПЧ ИН) - имеет промежуточное звено постоянного напряжения, на выходе которого пульсирующее напряжение или последовательность импульсов напряжения.
В таблице 5.1 сравниваются два типа преобразователей частоты: преобразователь частоты источник напряжения и преобразователь частоты источник тока.
|
|
ИН |
ИТ |
|
Схема |
|
|
|
Выходной импеданс |
Маленький (источник напряжения) |
Большой (источник тока) |
|
Регенерация энергии |
Требуется дополнительная цепь |
Дополнительная цепь не требуется |
|
Сглаживающий элемент |
Конденсатор |
Реактор |


Преобразователь частоты источник напряжения в свою очередь подразделяется на два типа. Первый - ПЧ АИМ с амплитудной импульсной модуляцией (АИМ) и второй - ПЧ ШИМ с широтно-импульсной модуляцией (ШИМ).
Амплитудная импульсная модуляция - это метод управления, при котором изменение амплитуды импульса напряжения (высоты импульса) на входе выпрямителя синхронно приводит к изменению частоты на выходе из инвертора.
Объяснение этого принципа представлено на рис. 8.

Рис. 8 Амплитудная импульсная модуляция
Выходная форма напряжения - прямоугольная, содержащая большое количество гармоник низких степеней, включая 5-ю и 7-ю гармоники, что приводит к пульсации момента двигателя [2].
Широтно-импульсная модуляция - это метод управления, при котором амплитуда напряжения (высота импульса) остается постоянной на выходе выпрямителя, а на выходе инвертора ширина импульсов напряжения и их количество на полупериод регулируется.
Элементная база
Как ранее упоминалось, преобразователь частоты есть силовой электронный прибор, основными компонентами которого являются современные силовые полупроводниковые приборы: диоды, тиристоры, ОТО - тиристоры и биполярные транзисторы с изолированным затвором IGBT. Эти элементы используются в схемах выпрямления и инвертирования преобразователя частоты.
Применение того или иного силового полупроводника обусловлено схемным решением, параметрами прибора, мощностью электропривода, ограничением массогабаритных показателей преобразователя частоты, требованиями электромагнитной совместимости и стоимостью. Анализ мировых тенденций развития частотно-регулируемого электропривода показывает, что за последние несколько лет ведущие мировые фирмы в области разработки силовых полупроводниковых приборов, например Сименс, Хитачи, АББ, Дженерал Электрик увеличивают номенклатуру выпускаемых модулей на базе IGBT транзисторов для различных преобразователей частоты.
Расширение области применения IGBT транзисторов обусловлено:
- высокой частотой (20 кГц) переключения прибора, что позволяет уменьшить содержание высших гармоник на выходе из преобразователя;
- возможностью модульного исполнения, при этом можно выбирать цельные устройства, полумост или трехфазный мост выпрямления и другие, что повышает надежность работы преобразователя.
Таблица 5.2 Наиболее важные характеристики IGBT
|
Параметр |
Символ |
Зависимость параметра от |
Обычные значения |
|
Максимальное запирающее напряжение |
UCES |
|
до 3,3 кВ |
|
Максимальный средний ток |
ICAVM |
Охлаждения |
до 1200 А |
|
Пороговое напряжение затвора |
UGE(tn) |
|
до 6 В |
|
Макс, напряжение затвор-эмиттер |
UGE |
|
+/-20 В |
|
Прямое падение напряжения |
UGЕsat |
Прямого тока |
до 4 В |
|
Потери энергии при включении |
Won |
Условия включения, Ic VCE |
100 мДж |
|
Потери энергии при выключении |
Woff |
Условия выключения, Iс VCE |
100 мДж |
6 ДОПОЛНИТЕЛЬНЫЕ УСТРОЙСТВА, ОБЕСПЕЧИВАЮЩИЕ ЭКСПЛУАТАЦИЮ ЧАСТОТНО-РЕГУЛИРУЕМОГО ЭЛЕКТРОПРИВОДА В СООТВЕТСТВИИ С ОСОБЕННОСТЯМИ ТЕХНОЛОГИЧЕСКОГО РЕЖИМА МЕХАНИЗМА
Дополнительные устройства применяются для обеспечения эксплуатации частотно-регулируемого привода в соответствии с особенностями технологического режима механизма (торможение, остановы и реверсы электропривода), расширения функций преобразователя частоты, а также для уменьшения негативных воздействий сети питания на преобразователь частоты и двигатель и соответственно их воздействия на сеть. К дополнительным можно отнести следующие устройства:
- дистанционный пульт управления;
- программируемые логические контроллеры;
- фильтры;
- тормозной резистор;
- регенеративный модуль.
Дистанционный пульт управления
Дистанционный пульт управления позволяет на расстоянии от 1 м и более управлять выполнением всех функций преобразователя частоты, а также копировать и вводить данные одного преобразователя частоты в другой, что намного ускоряет процесс отладки любого технологического процесса.
Программируемый логический контроллер
Контроллер предназначен для управления автоматическими устройствами в различных технологических процессах (конвейеры, ткацкие станки, насосные станции и т.д.). Контроллер состоит из микрокомпьютера с центральным процессором, скорость управления которого около 20 МГц; устройства арифметических операций: логических и цифровых входов-выходов; высокоскоростного счетчика; интерфейсных портов. Контроллер выполняет также функции пропорционального (Р), пропорционально-интегрального (PI) или пропорционально-интегрально-дифференциального (PID) регулятора.
Фильтры
Фильтры предназначены для обеспечения норм качества электрической энергии в сетях, где используются преобразователи частоты.
Так, в ГОСТ 13107-97 «Нормы качества электрической энергии в системах электроснабжения общего назначения», коэффициент 25-й гармонической составляющей напряжения сети питания 380 В допускается равным 1,5 %. Искажения напряжения, вносимые преобразователем частоты во входящую электрическую цепь, оценивают коэффициентом искажения kBX в процентах, который вычисляют по формуле [7]
|
|
(6.1) |
где k0 - коэффициент искажения синусоидальности кривой на выходе источника электроэнергии;
k1 - коэффициент искажения синусоидальности кривой в процентах, на выходе источника электроэнергии за нормированный интервал времени при включенном преобразователе частоты.
Определение гармонических составляющих выходного напряжения преобразователя частоты с переменной частотой выходного напряжения осуществляют до 15-й гармоники, если другие значения не указаны в ТУ на преобразователь [7]. Требования к максимальным искажениям тока в процентах от максимального тока, потребляемого нагрузкой, в соответствии с требованиями IEEE 519-1992 приведены в справочном Приложении К.
Фильтр входного напряжения
Фильтр входного напряжения - это дроссель переменного тока. Применяется при дисбалансе напряжения фаз сети в 3 % и более, а также когда мощность питающей сети 500 кВА или больше и происходят быстрые изменения ее мощности. Дроссель переменного тока фильтрует также высокочастотные помехи, приходящие из сети в преобразователь частоты и генерируемые преобразователем частоты в сеть. Кроме того, он улучшает форму кривой тока, подаваемого на преобразователь частоты.
Фильтр радиопомех
Фильтр радиопомех подавляет излучения преобразователя частоты в диапазоне радиоприема до уровня, определенного в «Общесоюзных нормах допускаемых индустриальных радиопомех» (Нормы 8-72) [8].
Фильтр электромагнитного излучения
Фильтр электромагнитного излучения устанавливается в соответствии с требованиями директивы по электромагнитной совместимости 89/336/ЕЕС, для обеспечения способности электрического или электронного оборудования действовать в электромагнитном окружении, не внося возмущений или помех [9].
Фильтр переменного тока для уменьшения вибраций
При запуске двигателя от преобразователя частоты его вибрация выше, чем при запуске от промышленной сети. Для уменьшения этой вибрации применяется специальный 3-х фазный дроссель.
Синус Фильтр (L-R-С - фильтр)
Синус Фильтр - это фильтр, устанавливаемый на выходе преобразователя частоты для улучшения (приближения к синусоиде) формы кривой выходного тока и напряжения, в результате чего уменьшается шум и вибрация двигателя. Синус фильтр позволяет также снизить скорость нарастания выходного напряжения du/dt между фазами до сетевого, тем самым продлевается срок службы изоляции обмоток двигателя.
Тормозной резистор
Тормозной резистор является дополнительным устройством, которое превращает избыточную мощность в тепло, при торможении двигателя, управляемого от преобразователя частоты. Тормозной резистор должен устанавливаться в отдельном шкафу, чтобы обеспечивалась возможность достаточной диссипации тепла.
Регенеративный модуль
Во время регенеративного торможения (возврата энергии в питающую сеть), двигатель действует как генератор, отдавая мощность через модуль IGBT в промежуточное звено постоянного напряжения. Вращающий магнитный поток сохраняется, что позволяет непрерывно управлять двигателем. Регенеративное торможение применяется в тех случаях, когда скорость двигателя должна только уменьшаться без достижения полной остановки.
7 ТРЕБОВАНИЯ К ИСТОЧНИКАМ ЭЛЕКТРОСНАБЖЕНИЯ ЧАСТОТНО-РЕГУЛИРУЕМОГО ЭЛЕКТРОПРИВОДА
Источником электроэнергии для частотно-регулируемого привода могут быть сеть электроснабжения с глухо заземленной или изолированной нейтралью, а также автономные электростанции. Подключение к системам электроснабжения напряжением выше 1000 В осуществляется через понижающие трансформаторы.
Номинальные напряжения на входе преобразователей частоты должны соответствовать ГОСТ 721-77 и ГОСТ 21128-83 и выбираться из ряда 6; 12; 27; 60; 110; 220; 380; 660; 1000 В. При коротких питающих линиях допускается выбирать напряжение из ряда: 230; 400; 690; 1050 В [8]. Нормы качества электрической энергии для питания частотно-регулируемого привода должны соответствовать ГОСТ 13109-97.
7.1 Дополнительные требования к двухобмоточному понижающему трансформатору
При электроснабжении преобразователей частоты от источника с изменяющимся напряжением и частотой (т.е. не стабилизированными), допустимый диапазон их изменения на входе должен быть указан в технических условиях на применяемый преобразователь частоты.
Работа преобразователя частоты сопровождается генерированием высших гармонических составляющих напряжения и тока, влияющих на работу трансформатора, увеличивая потери в нем. Мощность трансформатора должна обеспечивать отклонение напряжения от номинального на величину не более ±10 % и компенсировать воздействие гармонических токов. Для этого мощность трансформатора должна быть не менее, чем в два раза больше мощности подключаемого двигателя [2].
7.2 Дополнительные требования к автономной электростанции
При электроснабжении частотно-регулируемого привода от локального источника мощности такого, как автономная электростанция, необходимо учитывать следующую особенность. В соответствии с рекомендациями Японского стандарта JEMA-1354 [2] для компенсации эквивалентного противофазного тока преобразователя частоты 3 - фазному генератору переменного тока, мощность генератора должна быть в 5 ¸ 6 раз больше мощности двигателя, так как нагрузка генератора в виде преобразователя частоты создает высшие гармонические составляющие тока. Высшие гармонические составляющие тока наводят в обмотке возбуждения генератора магнитное поле противоположного направления основному, увеличивая потери в обмотках генератора, приводя их к нагреву и даже выгоранию.
Влияние высших гармонических составляющих тока нагрузки на генератор можно считать таким же, как действие на генератор тока противоположной фазы.
8 ТРЕБОВАНИЯ К КАБЕЛЯМ СЕТИ, ДВИГАТЕЛЯ И УПРАВЛЕНИЯ
Кабели, используемые для подключения к источнику электроснабжения преобразователя частоты, подключения электродвигателя к преобразователю частоты и управления частотно-регулируемым асинхронным электроприводом, должны удовлетворять требованиям по электромагнитной совместимости (ЭМС), температуре нагрева проводников, номинальным токам на выходе преобразователя частоты, к передаточному импедансу экрана кабеля.
В ГОСТе 24607-88 «Преобразователи частоты полупроводниковые. Общие технические требования» в пункте 2.4.2.17 определяются только допустимые уровни радиопомех, создаваемых преобразователями частоты, что недостаточно. В странах Европейского союза в январе 1996 года введена директива по электромагнитной совместимости (ЭМС) Electro Magnetic Compatibility. Согласно этой директиве, электротехническое устройство не должно быть источником помех для прочего оборудования, и оно должно иметь определенную стойкость к воздействию помех, возникающих при работе оборудования. Структурная схема международных стандартов по ЭМС, включенных в директиву, представлена в справочном Приложении Д.
Степень соответствия электротехнического изделия (преобразователя частоты, кабеля и т.д.) директиве по ЭМС делится на три уровня:
Уровень N: электротехническое изделие (ЭИ) не удовлетворяет каким-либо требованиям по излучению помех, если не применяется специальный фильтр радиопомех. При наличии дополнительного фильтра ЭИ отвечает требованиям по ЭМС, соответствующим применению в промышленной среде (EN 50081-2; EN 61800-3).
Уровень I: ЭИ удовлетворяет требованиям по излучению помех в промышленной среде (ЕN 50081-2; EN 61800-3).
Уровень С: ЭИ удовлетворяет требованиям по излучению помех для жилых, административных зданий и в промышленной среде (ЕN 50081-1-2; EN 61800-3).
Все ЭИ уровней N, I, С должны удовлетворять требованиям помехозащищенности (ЕN 50081-1-2; ЕN 61800-3). Требования директивы по ЭМС для кабелей представлены в таблице 8.1
|
Тип кабеля |
Уровень |
||
|
N |
I |
С |
|
|
Сетевой кабель |
1 |
1 |
1 |
|
Кабель электродвигателя |
2 |
2 |
3 |
|
Кабель управления |
4 |
4 |
4 |
Где: 1 - силовой кабель для неподвижного монтажа, подходящий для данного сетевого напряжения. Наличие экрана необязательно. (Рекомендуемые кабели NOKIA, MCMK, PROTODUR или аналогичные); 2 - силовой кабель с концентрическим защитным проводником, подходящий для данного сетевого напряжения. Рекомендуемые кабели NOKIA, MCMK или аналогичные); 3 - силовой кабель с экранирующей оболочкой, с низким полным волновым сопротивлением, подходящий для данного сетевого напряжения. (Рекомендуемые кабели NOKIA, MCCMK, SAB, OZCUY-J, PROTODUR или аналогичные); 4 - кабель управления с экранирующей оболочкой, с низким полным волновым сопротивлением. (Рекомендуемые кабели NOKIA, JAMAK, SAB, OZCuY-O, PROTOFLEX или аналогичные).
Передаточный импеданс экрана кабеля двигателя должен быть меньше или равен 1 Ом/м в диапазоне частот до 100 МГц.
Передаточный импеданс экрана кабеля управления должен быть меньше или равен 250 Ом/км в диапазоне частот до 30 МГц.
Размер (площадь поперечного сечения проводников) кабеля сети и двигателя должен быть таким, чтобы нести среднеквадратичный выходной ток преобразователя частоты и выдерживать нагрев до температуры 60 °С.
Рекомендуемые размеры кабелей в зависимости от выходных токов и напряжения сети приведены в справочном Приложении Б (Технические характеристики кабелей).
8.1 Зависимость электростатической емкости от условия прокладки кабелей
Когда кабель проложен под землей, как показано на рис. 9, необходимо учитывать его емкостной ток.

Рис. 9 Расположение кабеля под землей
d1 -
диаметр токоведущего проводника, мм;
d2 - диаметр наружной оболочки кабеля, мм
Расчет электростатической емкости для кабеля, проложенного под землей, осуществляется по формуле [1]
|
|
(8.1) |

где e - абсолютная диэлектрическая проницаемость изоляционного материала, F/м;
e* - относительная диэлектрическая проницаемость изоляционного материала, mF/км;
IН - номинальный ток кабеля, А.
Емкостной ток определяется по формуле
|
ICR = 2π∙f∙C∙U (А), |
(8.2) |
где f - частота напряжения, Гц;
U - напряжение кабеля, В.
На рис. 10 показана схема возникновения емкостного тока ICR

Рис. 10 Схема протекания емкостного тока
С - емкость
фазного провода относительно земли, F;
R - активное сопротивление фазы проводника относительно земли, Ом.
Кабель всегда имеет емкость и активное сопротивление по отношению к земле, которые обуславливают емкостной ток ICR. Сопротивление изоляции кабеля R должно быть не менее 0,4 МОм (при питающем напряжении 380 В). Емкость кабеля С зависит от длины кабеля, способа его прокладки и т.д.
Для трехфазного кабеля с виниловой изоляцией, напряжением до 600 В и частотой сети 50 Гц зависимость емкостного тока от площади сечения токоведущих жил и его длины показана на рис. 11.
Для расчета емкостного тока необходимо использовать данные из технических условий изготовителя кабеля.
Если величина емкостного тока ICR = 1 mA или меньше, это не влияет на работу электропривода. На рис. 12 показана зависимость величины электростатической емкости от условий прокладки кабеля.
Электростатическая емкость на км (mF/км)
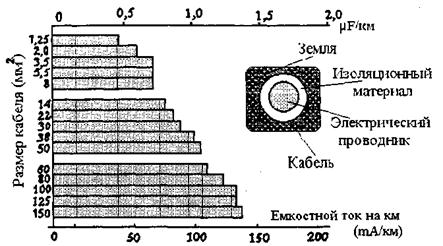
Рис. 11 Зависимость емкостного тока и электростатической емкости от поперечного кабеля и его длины

Рис. 12 Зависимость величины электростатической емкости от условий прокладки кабеля
8.2 Факторы, влияющие на длину кабеля двигателя
Когда длина кабеля между преобразователями частоты и двигателем более 10 м, это приводит к падению напряжения на его клеммах, уменьшая вращательный момент двигателя и увеличивая ток, что может привести к его перегреву. Как правило, величина падения напряжения между преобразователем частоты и электродвигателем не должна превышать 3 %.
В таблице 8.2 показана величина падения напряжения при длине кабеля между преобразователем частоты и электродвигателем 10 м.
Примечание. Данные в таблице приведены для нагрузки с постоянным моментом. Кабель состоит из стандартных медных жил.
Таблица 8.2 - Величины падения напряжения между преобразователем частоты и электродвигателем при длине кабеля 10 м
|
Мощность четырехполюсного эл.д., кВт |
Преобразователь частоты (ПЧ) |
Напряжение на выходе ПЧ, В |
Применяемый кабель |
Падение напряжения в линии при длине кабеля 10 м |
|||||
|
Мощность ПЧ, кВА |
Ток, А |
50 Гц |
5 Гц |
Площадь сечения жилы, мм2 |
Сопротивление при 20 °С, mОм/м |
Падение напряжения, В |
50 Гц, % |
5 Гц, % |
|
|
0,4 |
1 |
3,0 |
200 В |
28 В |
2 |
9,24 |
0,416 |
0,21 |
1,5 |
|
0,75 |
1,5 |
4,2 |
" |
" |
2 |
9,24 |
0,672 |
0,34 |
2,4 |
|
1,5 |
2,5 |
7,5 |
" |
" |
2 |
9,24 |
1,20 |
0,6 |
4,3 |
|
2,2 |
3,5 |
10,5 |
" |
" |
2 |
9,24 |
1,68 |
0,84 |
6,0 |
|
3,7 |
5,5 |
16 |
" |
" |
3,5 |
5,20 |
1,44 |
0,72 |
5,2 |
|
5,5 |
8 |
24 |
" |
|
5,5 |
3,33 |
1,35 |
0,67 |
5,6 |
|
7,5 |
11 |
32 |
" |
24 В |
8 |
2,45 |
1,36 |
0,68 |
5,7 |
|
11 |
16 |
46 |
" |
" |
14 |
1,30 |
1,04 |
0,52 |
4,3 |
|
15 |
22 |
64 |
" |
" |
22 |
0,824 |
0,91 |
0,46 |
3,8 |
|
18,5 |
33 |
95 |
" |
" |
22 |
0,824 |
1,03 |
0,57 |
4,2 |
|
22 |
33 |
95 |
" |
" |
30 |
0,624 |
1,02 |
0,51 |
4,3 |
|
30 |
40 |
121 |
" |
" |
38 |
0,487 |
0,97 |
0,49 |
4,0 |
|
37 |
50 |
145 |
" |
" |
50 |
0,378 |
0,94 |
0,47 |
4,0 |
|
45 |
60 |
182 |
" |
" |
60 |
0,303 |
0,91 |
0,46 |
3,7 |
|
55 |
75 |
220 |
" |
" |
60 |
0,303 |
1,06 |
0,53 |
4,4 |
Падение напряжения на кабельной линии преобразователь частоты - двигатель вычисляется по формуле
|
Падение напряжения в
линии (В) = |
(8.3) |
Для уменьшения величины падения напряжения на линии можно использовать вставку кабеля большего диаметра как показано на рис. 13.

Рис. 13 Вариант схемы для уменьшения величины падения
напряжения
на линии преобразователь частоты - электродвигатель
ПЧ - преобразователь частоты, ЭД - электродвигатель
Кабель двигателя должен быть как можно короче, чтобы исключить электромагнитную эмиссию, а также уменьшить емкостной ток. Изменения напряжения на выходе преобразователя частоты вызывают емкостной ток через паразитные емкости кабеля двигателя. Рекомендуется, чтобы длина кабеля двигателя не превышала 300 м. При параллельно подключенных электродвигателях длины отдельных кабелей суммируются. Преобразователи частоты, инверторы которых выполнены на биполярных транзисторах с изолированным затвором (IGBT), имеют амплитуды импульсов выходного напряжения, независимо от выходной частоты, приблизительно в 1,5 раза превышающие напряжение сети с очень коротким временем нарастания.
Напряжение на зажимах двигателя, в зависимости от свойств его кабеля, может почти удваиваться.
Фильтры типа dU/dt подавляют пики выходного напряжения преобразователя частоты и быстрые изменения напряжения, которые пагубно действуют на изоляцию электродвигателя. Кроме того, фильтры dU/dt уменьшают высокочастотное излучение кабеля электродвигателя, высокочастотные потери и токи в подшипниках электродвигателя, а также они используются с двигателями, у которых величина диэлектрического сопротивления изоляции неизвестна или недостаточна. Необходимость применения фильтра dU/dt определяется изоляцией электродвигателя. На рис. 14 представлены зависимости линейного пикового напряжения на зажимах двигателя (ULL) и времени нарастания (Dt) от длины кабеля при отсутствии и при наличии фильтра dU/dt.

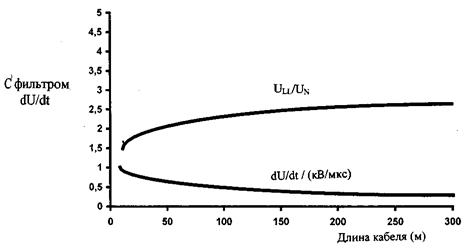
Рис. 14 Зависимости линейного пикового напряжения на
зажимах двигателя (ULl)
и времени нарастания (Dt) от длины
кабеля при отсутствии и при наличии
фильтра dU/dt
UN -
номинальное напряжение сети, В; ULL - линейное пиковое
напряжение на
зажимах двигателя, В; Dt - время
нарастания, т.е. промежуток времени, в течение
которого линейное напряжение на зажимах двигателя изменится от 10 до 90 %
номинала напряжения.
8.3 Требования к прокладке кабелей
Кабель двигателя должен находиться вдали от пути прокладки других кабелей. Рекомендуется прокладывать кабель двигателя и кабели управления в отдельных лотках. Как правило, должны быть исключены длинные параллельные участки с другими кабелями для уменьшения электромагнитных помех, вызываемых быстрыми изменениями выходного напряжения преобразователя частоты.
Если кабель прокладывался параллельно с другими кабелями, то должны соблюдаться минимальные расстояния, приведенные в таблице 8.3.
Таблица 8.3 - Расстояния между кабелями [10]
|
Расстояние между кабелями, м |
Длина экранированного кабеля, м |
|
0,3 |
< 50 |
|
1,0 |
< 200 |
Кабели управления и другие контрольные кабели должны прокладываться как можно дальше от кабеля двигателя. Минимальное расстояние между параллельными участками кабеля двигателя и кабелей управления равно 500 мм. Однако экранированные кабели двигателей нескольких преобразователей частоты можно монтировать рядом при условии, что они достаточно удалены от всех других кабелей. Пересечение кабелей управления и кабелей питания выполняется под углом как можно более близком к 90°.
Кабели сети, двигателя и управления должны выводиться из корпуса преобразователя частоты прямо и вниз на расстояние не менее 300 мм от его края для обеспечения удобств при техническом обслуживании. Прочие требования по монтажу должны быть выполнены в соответствии с ПУЭ и СНиП.
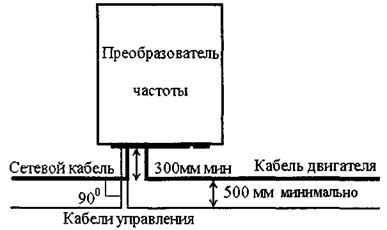
Рис. 15 Схема монтажа преобразователя частоты
9 КОММУТАЦИОННЫЕ АППАРАТЫ И ЗАЩИТНЫЕ УСТРОЙСТВА
Для отключения от источника электроснабжения преобразователя частоты и электродвигателя при проведении технического обслуживания, ремонта и защиты от аварийных режимов должны использоваться коммутационные и защитные устройства.
Устройство отключения питания
В соответствии с европейским стандартом EN 60204-1 «Безопасность машинного оборудования», в каждом источнике питания должно быть предусмотрено ручное устройство отключения питания. Необходимо использовать устройства следующих типов:
• выключатель-разъединитель, соответствующий категории применения по стандарту EN 60947-3;
• разъединитель, имеющий вспомогательный контакт, который, прежде чем разомкнуть главные контакты разъединителя, во всех случаях заставляет коммутирующие устройства разорвать цепь нагрузки;
• автоматический выключатель, соответствующий стандарту EN 60947-3.
Предохранители
Для защиты входного моста преобразователя частоты и сетевого кабеля от внешних коротких замыканий должны использоваться сверхбыстродействующие электронные предохранители.
Предохранители устанавливаются по одному для каждого фазного проводника в соответствии со стандартом IEC 947-4 (Выключатели и Системы). Характеристики рекомендуемых входных предохранителей: А - минимальный номинальный ток в амперах; U - номинальное напряжение в вольтах. Тип предохранителя определяется стандартами DIN 43620 и DIN 43653.
Устройство защитного отключения
Устройство защитного отключения (УЗО) применяется в качестве дополнительной меры защиты от поражения людей электрическим током.
Так как преобразователь частоты генерирует высшие гармоники тока и напряжения с порядковыми номерами (5, 7, 11, 13, 17, 23 и 25 и т.д.), предельные величины которых должны соответствовать стандартам ГОСТ 13109-97 по гармоническим составляющим напряжения и VDEO 160, EN 60555 по гармоническим составляющим тока, емкостной ток кабелей больше, чем в обычном случае и приблизительно равен 3 mA. Устройство защитного отключения отстраивается на величину тока, определяемую формулой
|
IУЗО > 3mA∙(N) + (ICRэд + ICRк), |
(9.4) |
где IУЗО - ток настройки срабатывания УЗО, mA;
N - число преобразователей частоты;
ICRэд - емкостной ток электродвигателя, mA;
ICRк - емкостной ток кабеля, mA.
Заземление
Нормативы электромагнитной совместимости требуют выполнения высокочастотного заземления экранов кабелей сети и электродвигателя со стороны преобразователя, а для кабеля двигателя необходимо еще заземление экрана со стороны электродвигателя. В случае использования нескольких преобразователей частоты их заземляющие проводники не должны образовывать петлю. Схема заземления показана на рис. 16.
|
|
|
|
а) неправильно |
б) правильно |
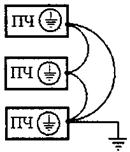

Рис. 16 Схема заземления преобразователя частоты ПЧ - преобразователь частоты.
Площадь сечения медного заземляющего проводника должна быть не менее 3,5 мм2. Заземление должно обеспечивать защиту от напряжения на корпусе оборудования согласно стандартам IEC 364, IEC 543, EN 50178 (5.3.2.2) и EN 60204-1.
Защита электродвигателя
Преобразователь частоты должен обеспечивать, как правило, следующие функции по защитам электродвигателя:
- защиту от тока перегрузки;
- защиту от перенапряжениий;
- защиту от понижения напряжения;
- защиту от замыканий на землю;
- контроль фаз питающей сети;
- контроль фаз выходной цепи;
- защиту двигателя от заклинивания;
- защиту привода от работы с недогрузкой;
- защиту двигателя от перегрузки.
Режимы защиты электродвигателя от перегрузки основываются на его тепловой модели, контролирующей изменение параметра произведение квадрата тока нагрузки на время (I2 · t), заложенного в программном обеспечении преобразователя частоты для стандартного электродвигателя и дополнительно на использовании термисторного датчика перегрева электродвигателя наружного или встроенного в обмотку статора.
Тепловая защита электродвигателя, основанная только на тепловой модели, не обеспечивает 100 %-ю точность, потому что температура двигателя только рассчитывается, а не измеряется, а также не учитывается изменение температуры окружающей среды. Если работают несколько двигателей от преобразователя частоты, в каждом из них должен быть установлен отдельный термисторный датчик.
Возможно ошибочное срабатывание термисторного датчика в результате воздействия высших гармоник напряжения на выходе преобразователя частоты, в общем случае защитой от этого является увеличение уставки срабатывания реле защиты примерно на 10 %.
10 СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ С ПРИМЕНЕНИЕМ АСИНХРОННОГО ЧАСТОТНО-РЕГУЛИРУЕМОГО ЭЛЕКТРОПРИВОДА МОЩНОСТЬЮ ДО 500 кВТ
Система автоматического управления асинхронным частотно-регулируемым электроприводом (САУ АЧРП) мощностью до 500 кВт является подсистемой информационно-управляющей системы (ИУС) производственных подразделений:
- газодобывающих промыслов;
- газоперерабатывающих заводов;
- станций подземного хранения газа;
- компрессорных станций.
САУ АЧРП должна интегрироваться в АСУ ТП и в системы водоснабжения, теплоснабжения и канализации производственных подразделений. САУ АЧРП должна соответствовать всем требованиям, изложенным в «Основных Положениях по автоматизации объектов энергообеспечения ОАО «Газпром» [12].
Основанием для применения САУ АЧРП является необходимость повышения эффективности технологического процесса.
В справочном Приложении Ж представлен пример системы автоматического управления технологическими процессами с применением частотно-регулируемого электропривода насосными агрегатами. Основным элементом системы являются программируемые логические контроллеры, представляющие 3 группы:
- встроенные контроллеры преобразователей частоты;
- контроллер управления технологическими процессами;
- контроллер сбора информации и управления связью (КСУ).
Встроенные контроллеры преобразователей частоты должны обеспечивать:
- регулирование соответствующих технологических параметров;
- АВР и АПВ агрегатов;
- формирование оптимальных переходных режимов пуска и остановки агрегата;
- защиту электродвигателя от аварийных режимов;
- автоматическое переключение агрегатов для равномерного расходования моторесурса;
- формирование сигнала «Предупреждение» при выходе за допустимые пределы параметров электропривода или технологического процесса;
- отображение текущих значений параметров электропривода и технологического процесса на панели местного управления.
Контроллер управления технологическими процессами (КТП) должен обеспечивать:
- сбор и обработку информации о состоянии оборудования и текущих измеряемых технологических параметрах, необходимой для автоматического управления технологическим процессом;
- косвенное определение величин неизмеряемых технологических параметров, необходимых для формирования оптимального алгоритма функционирования оборудования;
- определение уставок поддерживаемых технологических параметров и передачу их в САУ АЧРП;
- предварительную обработку информации о состоянии оборудования и технологических параметрах и передачу ее в верхний уровень на сервер;
- выявление ненормальных и аварийных ситуаций и передачу сообщений о них на сервер;
- прием и исполнение директивных команд, поступивших из ИУС подразделения;
- регулирование технологических параметров;
- выбор источника сигнала обратной связи для регуляторов технологических параметров при изменении режима функционирования;
- стабилизацию технологических параметров в случае выхода величины сигнала обратной связи за допустимые пределы.
Контроллер сбора информации и управления связью должен обеспечивать:
- реализацию дополнительных оптимизационных алгоритмов, требующих большого объема вычислений;
- сбор (с привязкой к реальному времени) и обработку информации с анализом на ненормальные и аварийные ситуации;
- сбор (с привязкой к реальному времени) и обработку дополнительной информации о технических системах, непосредственно не используемой в САУ АЧРП (в том числе с приборами коммерческого учета, имеющих интерфейс для связи с ЭВМ, а также с системами пожарной и охранной сигнализации и т.п.);
- передачу информации о техническом состоянии и технологических параметрах, аварийных и ненормальных режимах работы оперативному персоналу;
- прием и исполнение директивных команд, поступивших с верхнего уровня управления;
- сохранение собранной информации при потере связи и автоматическую передачу информации при восстановлении связи.
Литература
1. Плавное регулирование скорости вращения с помощью преобразователей частоты типа SAMI STROMBERG. Helsinki, 1986.
2. HITAHU INVERTER Technical guide book. Hitachi, Ltd. 1995.
3. Технический каталог. Преобразователи частоты ACS Single Drive для регулирования скорости и вращающего момента асинхронных электродвигателей с короткозамкнутым ротором мощностью от 2,2 до 3000 кВт. ABB Industry Oy. 1998.
4. Squirrel Cage Motors in Converter Drives. ABB Motors. 1995.
5. Сыромятников И.А. Режимы работы асинхронных и синхронных электродвигателей. М.: Госэнергоиздат, 1963.
6. Чиженко И.М. Справочник по преобразовательной технике. М.: Изд-во Техника, 1978.
7. ГОСТ 13109-97 «Нормы качества электрической энергии в системах электроснабжения общего назначения». Издание межгосударственного совета по стандартизации метрологии и сертификации. Минск, 1997.
8. ГОСТ 24607-88 «Преобразователи частоты полупроводниковые. Общие технические требования». М.: Изд-во стандартов, 1988.
9. Руководство по установке и запуску. Преобразователи частоты ACS 601 2,2 - 110 кВт. ABB Industry Oy. 1996.
10. Преобразователи частоты VACON. Руководство VAASA CONTROL OY 2000.
11. МЭК 34-17. Вторая редакция 1998-06. Асинхронные короткозамкнутые двигатели, питаемые от преобразователя частоты.
12. Основные положения по автоматизации объектов энергообеспечения ОАО «Газпром», 2000. М.: ИРЦ Газпром, 2000.
Приложение А
(справочное)
Таблица А.1 - Международные и национальные стандарты, регламентирующие применение частотно-регулируемого асинхронного электропривода
|
Наименование стандарта |
Тип стандартов и норм |
|||||
|
EN Европейские нормы |
IEC Международный электротехнический стандарт |
DIN, VDE Немецкие индустриальные нормы, Ассоциация немецких электротехников |
JIS Японский индустриальный стандарт |
JEM Ассоциация производителей электрических машин Японии |
IEEE Институт инженеров электриков и электронщиков США |
|
|
Машины электрические вращающиеся - номинальные данные |
EN 60034-1 |
IEC 34-1 IEC 85 |
DIN VDE 0530-1 |
|
|
|
|
Методы определения потерь и КПД вращающихся электрических машин |
-"- |
IEC 34-2 |
DIN VDE 57530-2 |
|
|
|
|
Классификация степеней защиты, обеспечиваемых оболочками вращающихся электрических машин |
EN 60034-5 |
IEC 34-5 |
DIN VDE 0530-5 |
|
|
|
|
Методы охлаждения вращающихся электрических машин |
-"- |
IEC 34-6 |
DIN IEC 34-6 |
|
|
|
|
Допустимые уровни шума |
EN 60034-7 |
IEC 34-9 |
DIN VDE 0530-9 |
|
|
|
|
Встроенная температурная защита |
DIN EN 21680 |
IEC 34-11 |
-"- |
|
|
|
|
Пусковые характеристики асинхронных короткозамкнутых двигателей, включая напряжение 660 В, 50 Гц |
-"- |
IEC 34-12 |
DIN VDE 0530-12 |
|
|
|
|
Механические вибрации электродвигателей |
-"- |
IEC 34-14 |
DIN VDE 0530-14 |
|
|
|
|
Стандартные напряжения МЭК |
EN 50019 |
IEC 38 |
DIN IEC 38 |
|
|
|
|
Безопасность машинного оборудования |
EN 60204-1 EN 60529 |
IEC 204-1 |
|
|
|
|
|
Приборы защиты, требования к установке |
|
IEC 947-1 IEC 947-3 |
|
|
|
|
|
Электромагнитная совместимость Методы испытаний |
EN 61800-3 |
|
|
|
|
|
|
Правила использования термисторного датчика в электродвигателе |
|
IEC 664 |
|
|
|
|
|
Уровни загрязнения окружающей среды |
|
IEC 721-3-3 |
|
|
|
|
|
Допустимая вибрация (эксплуатация, хранение и транспортировка) |
|
IEC 68-2-6 IEC 721-3-3 |
|
|
|
|
|
Эмиссия электромагнитных волн и электромагнитная интерференция |
EN 50081-2 |
|
|
|
|
|
|
Чувствительность к электромагнитной интерференции |
EN 50082-2 |
|
|
|
|
|
|
Максимальная длина кабеля двигателя, экранированный или армированный в соответствии с требованиями ЭМС |
EN 55011 |
|
|
|
|
|
|
Требования к передаче информации в системах автоматического управления |
EN 50170 |
|
|
|
|
|
|
Требования к изоляции кабелей |
|
|
DIN IEC 721-3-3 |
|
|
|
|
Защита от поражения электрическим током |
|
|
DIN VDE 0106 Часть 100, DIN VDE 0113 Часть 5 |
|
|
|
|
Требования к синус фильтрам |
|
|
DIN VDE 0530 |
|
|
|
|
Требования к размерам поперечного сечения кабеля |
|
|
DIN VDE 0100, VDE 0298 Часть 4 |
|
|
|
|
Классификация видов окружающей среды |
|
|
DIN IEC 721-3-3 |
|
|
|
|
Требования к сетевому дросселю, ограничивающему отклонения от нормы питающей сети |
|
|
DIN VDE 01 60 |
|
|
|
|
Требования электробезопасности для встраиваемых устройств |
|
|
VDE 0113 |
|
|
|
|
Механические вибрации. Методы испытаний |
|
|
|
JIS CO 911-1984 |
|
|
|
Виды исполнения защиты для оборудования, управления и контроля |
|
|
|
|
JEM 1030-1983 |
|
|
Рекомендации по периодичности осмотра преобразователя частоты общего назначения |
В соответствии с инструкцией производителя преобразователя частоты |
|||||
|
Общий стандарт по электромагнитной совместимости. Часть 2. Промышленные условия |
|
|
DIN VDE 0250, Часть 405 |
|
|
|
|
Выключатели и Системы |
|
IEC 947-4 |
|
|
|
|
|
Типы предохранителей |
|
|
DIN 43620 DIN 43653 |
|
|
|
|
Ограничение по высшим гармоникам тока |
EN 60555 |
IEC 555, IEC 1000-3, IEC 1800-3 |
|
|
|
IEEE 519-1992 |
|
Требования к защитному заземлению |
EN 60204-1 EN 50178 (5.3.2.2) |
IEC 364, IEC 543 |
|
|
|
|
|
Асинхронные короткозамкнутые двигатели, питаемые от преобразователей частоты. Руководство по применению |
|
IЕС 34-17 Первая редакция 1992 г. Вторая редакция 1998 г. |
VDE 0530 Дополнительная часть 2 |
|
|
|
Приложение Б
(справочное)
Технические характеристики кабелей
Таблица Б.1 - Кабель управления для преобразователей частоты экранированный, полиэтиленовый/полихлорвиниловый типа PROTOFLEX
|
Тип |
PROTOFLEX-EMV-CY |
PROTOFLEX-EMV-4PLUS-UV |
|
Количество жил |
4 |
4 |
|
Поперечное сечение, мм2 |
1,5 ¸ 185 |
1,5 ¸ 185 |
|
Диапазон напряжений, В |
600/1000 |
600/1000 |
|
Напряжение максимальное, В |
1700 |
1700 |
|
Напряжение испытания, В |
2500 |
2500 |
|
Изоляция |
ПЭ (полиэтиленовая), 70 °С |
ПЭ (полиэтиленовая), 70 °С |
|
Оболочка |
ПХВ (полихлорвиниловая), 70 °С |
ПХВ (полихлорвиниловая), 70 °С |
|
Цвет |
Прозрачный |
Черный |
|
Установка |
В зданиях |
Снаружи |
Таблица Б.2 - Кабель двигателя, удовлетворяющий требованиям по подавлению радиопомех типа PROTODUR
|
Тип |
PROTODUR |
|
Количество жил |
3 |
|
Поперечное сечение, мм2 |
1,5 ¸ 240 |
|
Диапазон напряжений, В |
600/1000 |
|
Напряжение максимальное, В |
1400 |
|
Напряжение испытания, В |
4000 |
|
Изоляция |
ПХВ, 70 °С |
|
Оболочка |
ПХВ, 70 °С |
|
Цвет |
Черный |
|
Установка |
В зданиях |
Таблица Б.3 - Технические данные кабеля управления типа PROTOFLEX-EMV-CY и PROTOFLEX-EMV-4PLUS-UV
|
Диапазон напряжений, В |
600/1000 |
по DIN VDE 0250, Часть 1 |
||
|
Напряжение максимальное, В |
1700 |
|
||
|
Изоляционное покрытие |
Изоляционный компаунд, сделанный из ПЭ 2Y12 по DIN VDE 0207, Часть 2 |
|||
|
Цвет проводников |
Зелено-желтый, черный, коричневый, голубой по DIN VDE 0293 |
|||
|
Внешняя оболочка |
ПХВ компаунд YM2 по DIN VDE 0207 |
|||
|
Экран |
Сплошной экран сверх оболочки, оплетка сделана из луженых медных проводников. Максимальный передаточный импеданс: 250 Ом/км при 30 МГц по DIN VDE 0250, Часть 405 |
|||
|
Радиус изгиба: |
Внешний диаметр d |
|||
|
свободно перемещаемый |
£ 12 мм |
12 < d £ 20 мм |
> 20 мм |
|
|
закрепленный |
5d |
7,5d |
10d |
|
|
|
10d |
15d |
20d |
|
|
Прочность на разрыв: |
|
|||
|
незакрепленное состояние |
£ 20 Н/мм2 пo DIN VDE 0298, Часть 3 |
|||
|
закрепленное состояние |
£ 50 Н/мм2 пo DIN VDE 0298, Часть 3 |
|||
|
Ограничение по температуре: |
|
|||
|
при работе |
макс. +70 °С |
|||
|
короткое замыкание £ 5 с |
+160 °C |
|||
|
хранение и транспортирование |
-40 °C ¸ +70 °C |
|||
Таблица Б.4 - Технические данные кабеля двигателя типа PROTODUR
|
Номинальное напряжение, В |
600/1000 |
|
Кабель |
Медный по DIN VDE 0295 |
|
Изоляционное покрытие |
Термопластиковая изоляция, изготовленная из ПХВ Y14 по DIN VDE 0207, Часть 4 |
|
Цвет проводников |
Черный, коричневый, голубой по DIN VDE 0293 |
|
Внешняя оболочка |
ПХВ компаунд YM3 по DIN VDE 0207, Часть 5 |
|
Экран |
Концентрические проводники CEANDER |
|
Радиус изгиба |
³ 12 диаметров кабеля |
|
Прочность на разрыв: |
|
|
Закрепленный |
£ 50 Н/мм2 |
|
Ограничение по температуре: |
|
|
при работе |
Макс. +70 °С |
|
короткое замыкание |
+160 °С |
|
хранение и транспортировка |
-40 °С ¸ +70 °С |
Таблица Б.5 - Рекомендуемые сетевые кабели и кабели двигателей для выходных токов IСТ (нагрузка с постоянным моментом на валу) и IVT (нагрузка с переменным моментом на валу) напряжение 400 В
|
ICT, А |
Кабель медный, мм2 |
IVT, А |
Кабель медный, мм2 |
|
2,5 |
3·1,5 + 1,5 |
3,5 |
3·1,5 + 1,5 |
|
3,5 |
3·1,5 + 1,5 |
4,5 |
3·1,5 + 1,5 |
|
4,5 |
3·1,5 + 1,5 |
6,5 |
3·1,5 + 1,5 |
|
6,5 |
3·1,5 + 1,5 |
8 |
3·1,5 + 1,5 |
|
8 |
3·1,5 + 1,5 |
10 |
3·1,5 + 1,5 |
|
10 |
3·1,5 + 1,5 |
13 |
3·1,5 + 2,5 |
|
13 |
3·1,5 + 2,5 |
18 |
3·4 + 4 |
|
18 |
3·4 + 4 |
24 |
3·6 + 6 |
|
24 |
3·6 + 6 |
32 |
3·10 + 10 |
|
32 |
3·10 + 10 |
42 |
3·10 + 10 |
|
42 |
3·10 + 10 |
48 |
3·10 + 10 |
|
48 |
3·10 + 10 |
60 |
3·16 + 16 |
|
60 |
3·16 + 16 |
75 |
3·25 + 16 |
|
75 |
3·25 + 16 |
90 |
3·35 + 16 |
|
90 |
3·35 + 16 |
110 |
3·50 + 25 |
|
110 |
3·50 + 25 |
150 |
3·70 + 35 |
|
150 |
3·70 + 35 |
180 |
3·95 + 50 |
|
180 |
3·95 + 50 |
210 |
3·120 + 70 |
|
210 |
3·150 + 70 |
270 |
3·185 + 95 |
|
270 |
3·185 + 95 |
325 |
2·(3·120 + 70) |
|
325 |
2·(3·120 + 70) |
410 |
2·(3·185 + 95) |
|
410 |
2·(3·185 + 95) |
510 |
2·(3·240 + 120) |
|
510 |
2·(3·240 + 120) |
580 |
2·(3·240 + 120) |
Таблица Б.6 - Рекомендуемые сетевые кабели и кабели двигателей для выходных токов IСТ (нагрузка с постоянным моментом на валу) и IVT (нагрузка с переменным моментом на валу) напряжение 500 В
|
ICT, А |
Кабель медный, мм2 |
IVT, А |
Кабель медный, мм2 |
|
2,5 |
3·1,5 + 1,5 |
3 |
3·1,5 + 1,5 |
|
3 |
3·1,5 + 1,5 |
3,5 |
3·1,5 + 1,5 |
|
3,5 |
3·1,5 + 1,5 |
5 |
3·1,5 + 1,5 |
|
5 |
3·1,5 + 1,5 |
6 |
3·1,5 + 1,5 |
|
6 |
3·1,5 + 1,5 |
8 |
3·1,5 + 1,5 |
|
8 |
3·1,5 + 1,5 |
11 |
3·2,5 + 2,5 |
|
11 |
3·2,5 + 2,5 |
15 |
3·4 + 4 |
|
15 |
3·4 + 4 |
21 |
3·6 + 6 |
|
21 |
3·6 + 6 |
27 |
3·10 + 10 |
|
27 |
3·10 + 10 |
34 |
3·10 + 10 |
|
34 |
3·10 + 10 |
40 |
3·10 + 10 |
|
40 |
3·10 + 10 |
52 |
3·16 + 16 |
|
52 |
3·16 + 16 |
65 |
3·25 + 16 |
|
65 |
3·25 + 16 |
77 |
3·35 + 16 |
|
77 |
3·35 + 16 |
96 |
3·50 + 25 |
|
96 |
3·50 + 25 |
125 |
3·70 + 35 |
|
125 |
3·70 + 35 |
160 |
3·95 + 50 |
|
160 |
3·95 + 50 |
180 |
3·95 + 50 |
|
180 |
3·95 + 50 |
220 |
3·150 + 70 |
|
220 |
3·150 + 70 |
260 |
3·185 + 95 |
|
260 |
3·185 + 95 |
320 |
2·(3·120 + 70) |
|
320 |
2·(3·120 - 70) |
400 |
2·(3·185 + 95) |
|
400 |
2·(3·185 - 95) |
460 |
2·(3·240 + 120) |
Таблица Б.7 - Рекомендуемые силовые кабели и кабели двигателей для выходных токов IСТ (нагрузка с постоянным моментом на валу) и IVT (нагрузка с переменным моментом на валу) напряжение 690 В
|
ICT, А |
Кабель медный, мм2 |
IVT, А |
Кабель медный, мм2 |
|
3,5 |
3·1,5 + 1,5 |
4,5 |
3·1,5 + 1,5 |
|
4,5 |
3·1,5 + 1,5 |
5,5 |
3·1,5 + 1,5 |
|
5,5 |
3·1,5 + 1,5 |
7,5 |
3·1,5 + 1,5 |
|
7,5 |
3·1,5 + 1,5 |
10 |
3·1,5 + 1,5 |
|
10 |
3·1,5 + 1,5 |
14 |
3·2,5 + 2,5 |
|
14 |
3·2,5 + 2,5 |
19 |
3·4 + 4 |
|
19 |
3·4 + 4 |
23 |
3·6 + 6 |
|
23 |
3·6 + 6 |
26 |
3·6 + 6 |
|
26 |
3·10 + 10 |
35 |
3·10 + 10 |
|
35 |
3·10 + 10 |
42 |
3·10 + 10 |
|
42 |
3·10 + 10 |
52 |
3·16 + 16 |
|
52 |
3·16 + 16 |
62 |
3·16 + 16 |
|
62 |
3·16 + 16 |
85 |
3·35 + 16 |
|
85 |
3·35 + 16 |
100 |
3·35 + 16 |
|
100 |
3·35 + 16 |
122 |
3·50 + 25 |
|
122 |
3·50 + 25 |
145 |
3·70 + 35 |
|
145 |
3·70 + 35 |
185 |
3·95 + 50 |
|
185 |
3·95 + 50 |
222 |
3·150 + 70 |
|
222 |
3·150 + 70 |
287 |
3·185 + 95 |
Таблица Б.8 - Рекомендуемые силовые кабели и кабели двигателей для выходных токов IСТ (нагрузка с постоянным моментом на валу) и IVT (нагрузка с переменным моментом на валу) напряжение 230 В
|
ICT, А |
Кабель медный, мм2 |
IVT, А |
Кабель медный, мм2 |
|
3,6 |
3·1,5 + 1,5 |
4,7 |
3·1,5 + 1,5 |
|
4,7 |
3·1,5 + 1,5 |
5,6 |
3·1,5 + 1,5 |
|
5,6 |
3·1,5 + 1,5 |
7 |
3·1,5 + 1,5 |
|
7 |
3·1,5 + 1,5 |
10 |
3·1,5 + 1,5 |
|
10 |
3·1,5 + 1,5 |
13 |
3·2,5 + 2,5 |
|
13 |
3·2,5 + 2,5 |
16 |
3·2,5 + 2,5 |
|
16 |
3·2,5 + 2,5 |
22 |
3·6 + 6 |
|
22 |
3·6 + 6 |
30 |
3·10 + 10 |
|
30 |
3·10 + 10 |
43 |
3·10 + 10 |
|
43 |
3·10 + 10 |
57 |
3·16 + 16 |
|
57 |
3·16 + 16 |
70 |
3·25 + 16 |
|
70 |
3·25 + 16 |
83 |
3·35 + 16 |
|
83 |
3·35 + 16 |
113 |
3·50 + 25 |
|
113 |
3·50 + 25 |
139 |
3·70 + 35 |
|
139 |
3·70 + 35 |
165 |
3·90 + 50 |
|
165 |
3·95 + 50 |
200 |
3·95 + 50 |
|
200 |
3·95 + 50 |
264 |
3·185 + 95 |
Приложение В
(справочное)
Таблица В.1 - Стандартная спецификация параметров преобразователей частоты
|
Питающая сеть |
380 ¸ 415 В / 400 ¸ 460 В, 3-х фазное |
||||||||||||||||||||||||
|
Тип (модель) |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
Степень защиты |
IP 20 , включая вентилятор охлаждения |
IP00 |
|||||||||||||||||||||||
|
Применяемый двигатель (2Р, 4P, ...; макс. КВт) |
Постоянный момент |
5,5 |
7,5 |
11 |
15 |
22 |
30 |
37 |
45 |
55 |
75 |
90 |
110 |
||||||||||||
|
Переменный момент |
7,5 |
11 |
15 |
22 |
30 |
37 |
45 |
55 |
75 |
90 |
110 |
132 |
|||||||||||||
|
Выходная мощность, кВА |
Постоянный момент |
380 В |
8,6 |
10,5 |
15 |
21 |
32 |
38 |
49 |
59 |
72 |
98 |
116 |
143 |
|||||||||||
|
400 В |
9,0 |
11 |
16 |
22 |
33 |
40 |
52 |
62 |
76 |
103 |
122 |
150 |
|||||||||||||
|
460 В |
10,4 |
12,7 |
18 |
25 |
38 |
46 |
60 |
72 |
88 |
119 |
140 |
173 |
|||||||||||||
|
Переменный момент |
380 В |
9,6 |
11,8 |
17 |
24 |
36 |
43 |
55 |
66 |
82 |
116 |
143 |
171 |
||||||||||||
|
400 В |
10,1 |
12,5 |
18 |
25 |
37 |
45 |
58 |
70 |
86 |
122 |
150 |
180 |
|||||||||||||
|
460 В |
11,6 |
14,3 |
21 |
29 |
43 |
52 |
67 |
80 |
99 |
140 |
173 |
207 |
|||||||||||||
|
Параметры сети на входе |
3 фазы, 380 ¸ 415 В / 400 ¸ 460 В ±10 %, 50 ¸ 60 Гц ±5 % |
||||||||||||||||||||||||
|
Номинальное напряжение IIЧ |
3 фазы, 380¸460 В |
||||||||||||||||||||||||
|
Номинальный выходной ток, А |
Постоянный момент |
13 |
16 |
23 |
32 |
48 |
58 |
75 |
90 |
110 |
149 |
176 |
217 |
||||||||||||
|
Переменный момент |
16 |
23 |
30 |
44 |
59 |
74 |
88 |
108 |
146 |
176 |
217 |
260 |
|||||||||||||
|
Система управления |
Бездатчиковая, векторная, широтно-импульсная модуляция |
||||||||||||||||||||||||
|
Диапазон выходной частоты |
0,1 ¸ 400 Гц |
||||||||||||||||||||||||
|
Точность установки частоты |
±0,01 % цифровая установка, ±0,1 % аналоговая установка (25 ± 10 °С) |
||||||||||||||||||||||||
|
Разрешающая способность по частоте |
Цифровая установка 0,01 Гц |
||||||||||||||||||||||||
|
Характеристика напряжение/частота |
U/f управление (постоянный момент, уменьшенный момент), бездатчиковое векторное управление |
||||||||||||||||||||||||
|
Перегрузка по току |
150 %, 1 минута |
||||||||||||||||||||||||
|
Время ускорения/замедления |
0,01 ¸ 3000 секунд |
||||||||||||||||||||||||
|
Стартовый момент |
150 % или более (при 1 Гц) |
||||||||||||||||||||||||
|
Средний тормозной момент |
Регенеративное торможение |
Европейская версия |
Приблизительно 50 ¸ 60 % |
||||||||||||||||||||||
|
Другие модели |
Приблизительно 10 ¸ 20 % |
||||||||||||||||||||||||
|
Торможение постоянным током |
Управление на минимальной частоте при старте или замедлении, настройка времени и силы торможения |
||||||||||||||||||||||||
|
Входной сигнал |
Установка частоты |
Цифров. операт. |
Установка кнопками D, Ñ |
||||||||||||||||||||||
|
Внешний сигнал |
Переменный резистор 500 Ом ¸ 2 кОм, 2 Вт 0 ¸ 5 В, 0 ¸ 10 В постоянного тока 4 ¸ 20 мА |
||||||||||||||||||||||||
|
Вперед/реверс, пуск и стоп |
Цифров. операт. |
Пуск/Стоп (вперед или реверс) |
|||||||||||||||||||||||
|
Внешний сигнал |
Вперед пуск/стоп |
||||||||||||||||||||||||
|
Интеллектуальный входной терминал |
RV (команда на реверс), FRS (команда на остановку свободным выбегом), USP (установка защиты от автоматического старта), CF (установка многоступенчатой скорости), СН (двухступенчатое ускорение/замедление), JG (отстройка от резонансной частоты), RS (сброс входного сигнала), SFT (блокировка программного обеспечения) и другие |
||||||||||||||||||||||||
|
Выходной сигнал |
Интеллектуальный входной терминал |
FА (несущая частота), RUN (пусковой сигнал), OTQ (сигнал по перегрузке) |
|||||||||||||||||||||||
|
Частотный мониторинг |
Аналоговое измерение (0 ¸ 10 В, I = 1 мА вся шкала), цифровой частотный сигнал, аналоговый мониторинг тока и момента через дистанционный оператор |
||||||||||||||||||||||||
|
Выходной сигнал аварии |
1C |
||||||||||||||||||||||||
|
Другие функции |
AVR (автоматическое регулирование напряжения); установка просмотра данных; изменение U/f характеристики; изменение формы кривой ускорения/замедления; 8 ступеней скорости; изменение несущей частоты (2 ¸ 16 кГц); настройка электронной тепловой защиты; просмотр истории аварий и др. |
||||||||||||||||||||||||
|
Защитные функции |
Перегрузка по току; перенапряжение; настройка электронной тепловой защиты; отклонение по температуре; обрыв заземления, предельная нагрузка; перегрузка тормозного резистора и др. |
||||||||||||||||||||||||
|
Общая спецификация |
Температура/ влажность |
Постоянный момент |
- 10¸50 °С / 20¸90 % влажность (без конденсации) |
||||||||||||||||||||||
|
Переменный момент |
- 10 ¸ 40 °С / 20 ¸ 90 % влажность (без конденсации) |
||||||||||||||||||||||||
|
Вибрация |
0,6 G при 10 ¸ 55 Гц |
0,2 G при 10 ¸ 55 Гц |
|||||||||||||||||||||||
|
Установка |
Высота 1000 или ниже, внутренняя (отсутствие коррозионного газа и допустимый уровень пыли) |
||||||||||||||||||||||||
|
Окраска |
|
||||||||||||||||||||||||
|
Опции |
Различное применение компьютера (ПИД-управление, связь, реле); дистанционный оператор; устройство копирования данных; кабели; тормозной резистор, фильтры и др. |
||||||||||||||||||||||||
|
Масса, кг |
7,5 |
7,5 |
13 |
13 |
21 |
36 |
36 |
46 |
46 |
70 |
70 |
80 |
|||||||||||||
Приложение Г
(справочное)

|
Поз. |
Наименование |
Кол. |
Примечание |
|
ВР |
Датчик давления МТ 100Р |
1 |
Uвых 0 ¸ 10 В |
|
F1-F3 |
Предохранитель IIPC-6П с ПВД-1.0 |
3 |
|
|
G1 |
Преобразователь частоты JE-300 |
1 |
250 кВт |
|
G2 |
Блок питания датчика давления |
1 |
|
|
H1-H3 |
Арматура АМЕ с лампой КМ24-35 |
3 |
|
|
KT1-2 |
Реле времени ВЛ-59 |
2 |
|
|
КК1-2 |
Реле тепловое |
2 |
|
|
KV1-2 |
Реле PП21-003 с розеткой тина I |
2 |
Uпит ~ 24 В |
|
КМ1-5 |
Пускатель магнитный |
5 |
|
|
М1-М2 |
Электродвигатель насоса |
2 |
|
|
R1 |
Резистор 500 - 2000 Ом, 1 - 2 Вт |
1 |
|
|
R2-R4 |
Резистор МЛТ-2-1000 Ом ±10 % |
3 |
|
|
SA1 |
Переключатель на 2 положения |
1 |
|
|
SA2-3 |
Переключатель на 3 положения |
2 |
|
|
SР1 |
Манометр электроконтактный |
1 |
|
|
QF |
Выключатель автоматический |
1 |
|
|
TV |
Трансформатор ОСМ-0.16 220/29-5 |
1 |
|
|
К |
Контроллер PID-Е |
1 |
|
1. Тип и мощность коммутационной и защитной аппаратуры определяется из параметров электродвигателей насосов.
2. Параметры блока питания датчика давления G2 определяются требованиями для датчика МТ 100Р с сигналом 0 ¸ 10 В, задаваемые цифровым оператором преобразователя частоты (ПЧ), токовым сигналом 4 ¸ 20 мА или Контроллером.
3. При монтаже и наладке оборудования руководствоваться техническим описанием и инструкцией по эксплуатации преобразователя частоты.
4. Применение сетевых фильтров, фильтров электромагнитных излучений, фильтров радиочастот, выходных фильтров определяется исходя из конкретных условий эксплуатации преобразователя частоты.
5. Электрооборудование рекомендуется размещать в металлическом шкафу.
6. Заземление выполнить согласно ТО и ИЭ на преобразователь частоты и действующим ПУЭ.
7. При управлении от Контроллера К токовый сигнал от датчика давления поступает на клеммы I(-) и L(+), а с клемм О и L на аналогичные клеммы преобразователя частоты.
|
|
|
|
|
|
Схема электрическая ЭЗ |
||||||
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
Насосная станция |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
||||||||
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
||||||
|
|
|
|
|
||||||||
|
|
|
|
|
||||||||
Приложение Д
(справочное)
Международные стандарты электромагнитной совместимости (ЭМС).

Приложение Ж
(справочное)
Система автоматического управления технологическими процессами с применением асинхронного частотно-регулируемого электропривода
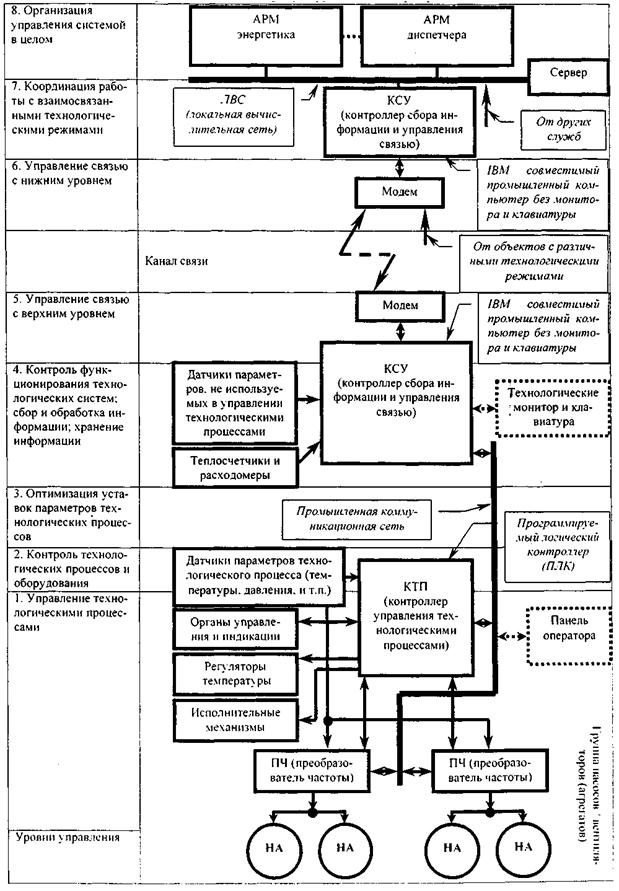
Приложение И
(справочное)
Таблица И.1 - Перечень электроприводных установок объектов газовой промышленности, режимы работы которых рекомендуется регулировать изменением частоты вращения асинхронных электродвигателей
|
Наименование электроприводных установок |
Режимы работы, назначение |
Принятые системы автоматизации и управления |
Примечание |
|
I. Электроприводные установки газоперекачивающих агрегатов |
|||
|
Рабочий насос системы уплотнения масло-газ |
Работает с начальной производительностью, перепад давления регулируется дросселирующим устройством |
Включается и отключается САУ ГПА |
|
|
Аппарат воздушного охлаждения масла |
Работает в зависимости от температуры масла |
Включается и отключается дистанционно персоналом КС |
|
|
II. Электроприводные установки общецехового назначения |
|||
|
Аппарат воздушного охлаждения газа |
Количество работающих АВО зависит от температуры газа на выходе КС |
Включается и отключается дистанционно персоналом КС |
|
|
III. Электроприводные установки общестанционного назначения и вне КС |
|||
|
Насосы водозаборного сооружения |
Обеспечивают закачку воды в приемник резервуара |
Включается дистанционно при малых объемах резервуаров. Работают в сложных режимах |
Применение регулирования целесообразно при неравномерном потреблении, частых включениях и малых емкостях |
|
Насосы воды 1-го подъема |
Обеспечивают подачу воды в водонапорные башни или резервуары (емкости), работают по принципу, "мин-макс" |
Включается и отключается автоматически |
-"- |
|
Насосы воды 2-го подъема |
Обеспечивают подачу воды потребителям |
Включается системой централизованного контроля и управления КС |
-"- |
|
Насосы воды циркуляционные холодного цикла |
Обеспечивают подачу холодной воды в зависимости от потребления |
Работают постоянно с автоматическим включением резерва |
|
|
Насосы воды циркуляционные горячего цикла |
Обеспечивают подачу горячей воды в зависимости от потребления |
Работают постоянно с автоматическим включением резерва |
|
|
IV. Электроприводные установки газоперерабатывающего завода |
|||
|
Аппарат воздушного охлаждения газа |
Постоянная производительность |
Включается и отключается дистанционно персоналом |
Необходимо регулирование производительности в зависимости от температуры окружающей среды |
|
Вентиляторы технологические |
-"- |
-"- |
Необходимо регулирование подачи воздуха в зависимости от количества работающих печей и потребности технологии |
|
Газодувка |
-"- |
-"- |
Необходимо регулировать подачу газа в зависимости потребности технологии |
|
Шнеки |
-"- |
-"- |
Необходимо регулировать подачу продукта (линейную скорость шнека) |
|
Барабан грануляционный БАС-20 |
-"- |
-"- |
Необходимо регулировать обороты барабана в зависимости от подачи продукта |
|
Компрессор воздуха 2ГМ4-24-9 |
-"- |
-"- |
Необходимо регулировать производительность работы |
|
V. Электроприводные установки АГНКС |
|||
|
Поршневой компрессор |
Постоянная производительность, частые запуски |
Включается и отключается дистанционно оператором АГНКС |
|
|
VI. Прочие электроприводные установки |
|||
|
Погружные насосы |
Постоянная производительность |
Включается и отключается дистанционно персоналом |
|
|
Станки качалки нефти малодебитных скважин |
Постоянная производительность |
-"- |
|
Приложение К
(справочное)
IEЕЕ 519-1992 Практические рекомендации и требования к гармоникам в электрических системах (гармоники тока)
Таблица 10.3 - Пределы искажения тока в распределительных системах общего назначения (от 120 В до 69000 В)
|
Максимальные гармонические искажения тока в процентах (%) от максимального тока, потребляемого нагрузкой IL |
|||||
|
Порядковый номер гармоники ( Нечетные гармоники) |
|||||
|
ISC/IL |
< 11 |
11 £ h < 17 |
17 £ h < 23 |
23 £ h < 35 |
35 £ h |
|
< 20* |
4,0 |
2,0 |
1,5 |
0,6 |
0,3 |
|
20 < 50 |
7,0 |
3,5 |
2,5 |
1,0 |
0,5 |
|
50 < 100 |
10,0 |
4,5 |
4,0 |
1,5 |
0,7 |
|
100< 1000 |
12,0 |
5,5 |
5,0 |
2,0 |
1,0 |
|
> 1000 |
15,0 |
7,0 |
6,0 |
2,5 |
1,4 |
|
* Все оборудование, генерирующее электроэнергию, ограничивается этими величинами искажения тока |
|||||
|
ISC - максимальный ток короткого замыкания IL - максимальный ток (основной частоты), потребляемый нагрузкой |
|||||
СОДЕРЖАНИЕ