ФЕДЕРАЛЬНОЕ АГЕНТСТВО
ПО ТЕХНИЧЕСКОМУ РЕГУЛИРОВАНИЮ И МЕТРОЛОГИИ
|
|
НАЦИОНАЛЬНЫЙ |
ГОСТ Р |

Глобальные навигационные спутниковые системы
МОРСКАЯ
НАВИГАЦИОННАЯ АППАРАТУРА
ПОТРЕБИТЕЛЕЙ
Технические
характеристики, методы
и требуемые результаты испытаний
|
|
Москва Стандартинформ 2011 |
Предисловие
Цели и принципы стандартизации в Российской Федерации установлены Федеральным законом от 27 декабря 2002 г. № 184-ФЗ «О техническом регулировании», а правила применения национальных стандартов Российской Федерации - ГОСТ Р 1.0-2004 «Стандартизация в Российской Федерации. Основные положения»
Сведения о стандарте
1 РАЗРАБОТАН Закрытым акционерным обществом «Центральный научно-исследовательский и проектно-конструкторский институт морского флота» (ЗАО «ЦНИИМФ») совместно с Федеральным государственным унитарным предприятием «Научно-технический центр современных навигационных технологий «Интернавигация» (ФГУП «НТЦ «Интернавигация»)
2 ВНЕСЕН Техническим комитетом по стандартизации ТК 363 «Радионавигация»
3 УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Приказом Федерального агентства по техническому регулированию и метрологии от 21 декабря 2010 г. № 810-ст
4 ВВЕДЕН ВПЕРВЫЕ
Информация об изменениях к настоящему стандарту публикуется в ежегодно издаваемом информационном указателе «Национальные стандарты», а текст изменений и поправок - в ежемесячно издаваемых указателях «Национальные стандарты». В случае пересмотра или отмены настоящего стандарта соответствующее уведомление будет опубликовано в ежемесячно издаваемом информационном указателе «Национальные стандарты». Соответствующая информация, уведомление и тексты размещаются также в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет
СОДЕРЖАНИЕ
НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
Глобальные навигационные спутниковые системы
МОРСКАЯ НАВИГАЦИОННАЯ АППАРАТУРА ПОТРЕБИТЕЛЕЙ
Технические характеристики, методы и требуемые результаты испытаний
The Global Navigation Satellite Systems. Maritime navigation
receiver equipment.
Technical requirements, test methods and required test results
Дата введения - 2011-12-01
1 Область применения
Настоящий стандарт распространяется на судовую навигационную аппаратуру потребителей, предназначенную для определения координат местоположения судов по сигналам глобальных навигационных спутниковых систем ГЛОНАСС и GPS, используемых на стадии плавания морских судов и судов внутреннего речного и смешанного («река - море») плавания, которая определена как прибрежные воды, подходы к портам, узкости, где свобода маневрирования ограничена, а также при плавании в океане для судов, скорость которых не превышает 70 узлов [1].
Настоящий стандарт устанавливает технические и эксплуатационные требования, методы и требуемые результаты испытаний к судовой аппаратуре, используемой только для целей определения координат местоположения, путевого угла, скорости относительно грунта и времени.
Настоящий стандарт не распространяется на другие вычислительные возможности, которые могут быть реализованы в навигационной аппаратуре потребителей.
2 Нормативные ссылки
В настоящем стандарте использованы нормативные ссылки на следующие стандарты:
ГОСТ Р 52928-2010 Система спутниковая навигационная глобальная. Термины и определения
ГОСТ Р МЭК 60945-2007 Морское навигационное оборудование и средства радиосвязи. Общие требования. Методы испытаний и требуемые результаты испытаний
Примечание - При пользовании настоящим стандартом целесообразно проверить действие ссылочных стандартов в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет или по ежегодно издаваемому информационному указателю «Национальные стандарты», который опубликован по состоянию на 1 января текущего года, и по соответствующим ежемесячно издаваемым информационным указателям, опубликованным в текущем году. Если ссылочный стандарт заменен (изменен), то при пользовании настоящим стандартом следует руководствоваться заменяющим (измененным) стандартом. Если ссылочный стандарт отменен без замены, то положение, в котором дана ссылка на него, применяется в части, не затрагивающей эту ссылку.
3 Термины и определения
В проекте стандарта применены термины по ГОСТ Р 52928, а также следующие термины с соответствующими определениями:
3.1 абсолютная точность определения местоположения потребителя ГНСС: Точность определения местоположения потребителя в геоцентрической пространственной системе координат.
3.2 автономный контроль целостности навигационной аппаратурой потребителя ГНСС: Метод контроля целостности глобальной навигационной спутниковой системы, основанный на оценке параметров принимаемых радионавигационных сигналов навигационной аппаратурой потребителя.
3.3 доступность системы: Вероятность получения потребителем в рабочей зоне достоверной информации о своем местоположении в заданный момент времени и с требуемой точностью. Выражается в процентах времени на определенном временном интервале, в течение которого обеспечиваются заданные условия.
3.4 интерфейсный контрольный документ ГНСС: Документ, устанавливающий структуру, содержание и формат навигационной информации, передаваемой потребителю ГНСС.
3.5 многолучевость радионавигационного сигнала ГНСС: Эффект, возникающий при приеме навигационной аппаратурой потребителя ГНСС радионавигационного сигнала с одного и того же навигационного космического аппарата ГНСС, но с разными траекториями прохождения вследствие отражения сигнала от поверхности Земли и близлежащих объектов.
3.6 навигационный сигнал с санкционированным доступом: Навигационный сигнал, предоставляемый специальным потребителям.
3.7 определение местоположения потребителя ГНСС (Нрк. местоопределение потребителя ГНСС): Определение пространственных координат потребителя ГНСС.
3.8 система координат: Опорная система координат, используемая для расчета координат места.
3.9 совместимость ГНСС: Способность раздельного или совместного использования различных навигационных систем и их функциональных дополнений без помех со стороны отдельной системы, отдельного функционального дополнения или отдельного сигнала системы.
3.10 эксплуатационная готовность ГНСС (Нрк. доступность): Способность глобальной навигационной спутниковой системы обеспечивать проведение навигационных определений в заданный момент времени.
3.11 функциональное дополнение ГНСС: Комплекс технических и программных средств, предназначенный для обеспечения потребителя ГНСС дополнительной информацией, позволяющей повысить точность и достоверность определения его пространственных координат, составляющих скорости движения и поправки часов и гарантирующей целостность ГНСС.
3.12 погрешность навигационного определения: Статистическая характеристика разности между найденным положением потребителя и истинными координатами для произвольной точки в зоне обслуживания в течение заданного интервала времени.
3.13 стандартная точность навигационных определений: Заданный уровень точности определения пространственных координат, составляющих скорости движения и поправки часов, доступный любому потребителю ГНСС.
3.14 целостность ГНСС: Способность глобальной навигационной спутниковой системы выдавать потребителям ГНСС своевременное и достоверное предупреждение в тех случаях, когда какие-либо из ее навигационных космических аппаратов нельзя использовать по целевому назначению в полном объеме.
4 Обозначения и сокращения
В настоящем стандарте применены следующие обозначения и сокращения:
ВТ - высокая точность;
ГНСС - глобальная навигационная спутниковая система;
ГЛОНАСС - глобальная навигационная спутниковая система Российской Федерации;
ДГЛОНАСС - дифференциальная подсистема ГНСС ГЛОНАСС;
ИНМАРСАТ - спутниковая система связи;
КИ - корректирующая информация;
ККС - контрольно-корректирующая станция;
ЛДПС - локальная дифференциальная подсистема;
МПВ - модуль приемовычислительный;
НАП - навигационная аппаратура потребителей;
ПЗ-90 - общеземная система координат «Параметры Земли 1990 г.»;
ПКИ - приемник корректирующей информации;
С/А - открытый код доступа;
СТ - стандартная точность;
ШДПС - широкозонная дифференциальная подсистема;
COG - курс относительно грунта (путевой угол);
DGPS - дифференциальная подсистема ГНСС GPS;
DTM - опорные системы координат;
GPS - глобальная навигационная спутниковая система Соединенных Штатов Америки;
GBS - определение отказа спутника ГНСС;
GGA - данные о координатах места по GPS;
GLL - данные о координатах места;
GNS - данные о координатах места по ГНСС GPS и ГЛОНАСС;
GRS - разность дальностей до спутника ГНСС;
GSA - фактор ухудшения точности ГНСС, действующие спутники;
GST - статистическая ошибка псевдодальности по ГНСС;
GSV - видимые спутники ГНСС;
MSK - манипуляция с минимальным фазовым сдвигом;
HDOP - горизонтальный геометрический фактор ухудшения точности местоопределения в режиме двухмерных измерений;
NMEA - национальный морской стандарт для сопряжения с внешним навигационным оборудованием;
PDOP - пространственный геометрический фактор ухудшения точности в режиме трехмерных измерений местоположения;
PRC - поправка псевдодальности;
RRC - поправка к скорости изменения псевдодальности;
RAIM - автономный контроль целостности в приемнике;
RMC - рекомендуемый минимальный перечень данных по GPS и ГЛОНАСС;
RTCM - радиотехническая комиссия по морским службам;
RTCA - радиотехническая комиссия по авиационным службам;
SBAS - система функциональных дополнений спутникового базирования;
SOG - скорость относительно грунта;
VTG - путевой угол и скорость относительно грунта;
UTC - универсальное координированное время;
WGS-84 - всемирная геодезическая система координат 1984 г.;
ZDA - время и дата.
5 Технико-эксплуатационные требования
5.1 Общие требования
Настоящий стандарт определяет технические и эксплуатационные требования, методы и требуемые результаты испытаний НАП, основанные на использовании открытых сигналов ГЛОНАСС и сигналов GPS в режиме работы определения координат в навигационных целях. Кроме этого стандарт предусматривает использование дифференциальных поправок DGPS и ДГЛОНАСС и дополнительно определяет требования, связанные с измерением времени, а также параметров движения судна - скорости и путевого угла относительно грунта в соответствии с [2], [3], [4].
Дополнительные возможности НАП, которые могут быть обеспечены в аппаратуре и связанные с вычислительными функциями, передачей входных/выходных данных и отображением информации на дисплее, не должны ухудшать характеристик навигационной аппаратуры.
5.2 Состав оборудования НАП ГЛОНАСС/GPS
Навигационная аппаратура потребителей систем ГЛОНАСС/GPS определяет состав аппаратуры, включающей все компоненты и узлы, которые необходимы для выполнения заданных функций.
НАП ГНСС должна содержать следующие устройства:
1 антенна, обеспечивающая прием сигналов систем ГЛОНАСС/GPS;
2 приемник сигналов системы ГЛОНАСС/GPS и процессор;
3 средство, обеспечивающее расчет географических координат;
4 устройство контроля и сопряжения;
5 дисплей для отображения координат и, если необходимо, других выходных данных.
НАП ГНСС ГЛОНАСС/GPS может поставляться в одной из нескольких комплектаций, обеспечивающих получение необходимой информации о координатах.
Например:
- автономный приемник сигналов ГЛОНАСС/GPS со средствами доступа к рассчитанным координатам посредством наборного поля и отображением требуемой информации на дисплее;
- приемник сигналов ГЛОНАСС/GPS, входящий в состав интегрированной навигационной системы со средствами доступа к рассчитанным координатам посредством соответствующего интерфейса и отображения необходимой информации на выносном дисплее.
Приемная аппаратура может выполняться и в других комплектациях.
5.3 Технические требования к объединенной НАП ГНСС ГЛОНАСС/GPS
5.3.1 Общие требования
Объединенная судовая НАП ГЛОНАСС/GPS должна обеспечивать прием и обработку сигналов GPS в стандартном режиме работы и сигналов ГЛОНАСС с открытым кодом стандартной точности.
НАП должна осуществлять расчет географической широты и долготы в градусах, минутах, тысячных долях минуты и времени обсерваций относительно UTC [10]. Должна быть предусмотрена возможность преобразования вычисленных данных в систему координат используемой навигационной карты. На дисплее и любых выходных данных должен отображаться признак используемой системы координат.
НАП ГЛОНАСС/GPS должна работать с радиосигналами частотного диапазона L1 и С/А системы GPS и сигналами частотного диапазона L1 и кода СТ системы ГЛОНАСС.
5.3.2 Устройства вывода данных
НАП ГЛОНАСС/GPS должна иметь, по крайней мере, один выходной порт для передачи информации о координатах и параметрах движения объекта в другое навигационное оборудование.
Выходные данные должны соответствовать форматам, соответствующим требованиям [5].
Выходные данные о местоположении объекта должны содержать в себе следующие информационные сообщения (предложения):
DTM, GGA, GNS, RMC, VTG и ZDA.
Для целей передачи данных о местоположении информационные предложения могут использоваться в любой комбинации.
Если информационное предложение использует опорную систему координат (исходные геодезические данные), отличающуюся от системы WGS-84, тогда сообщение DTM должно использоваться в соответствии с [5].
При интегрировании НАП с другими навигационными средствами дополнительно могут быть предусмотрены и использоваться в любой комбинации следующие информационные предложения:
GRS, GSA, GST и GSV
Примечание - Предложения GRS, GSA, GST и GSV необходимы для осуществления внешнего контроля целостности системы.
Эти предложения должны быть синхронизированы с соответствующими сообщениями о местоположении объекта (GGA или GNS).
5.3.3 Точность определения координат местоположения судна
5.3.3.1 Точность в статическом режиме
Точность в статическом режиме НАП ГЛОНАСС/GPS должна быть такой, чтобы погрешность определения местоположения антенны в горизонтальной плоскости с вероятностью 95 % не превышала 15 м без использования КИ дифференциальной подсистемы и 10 м с вероятностью 95 % с использованием КИ дифференциальной подсистемы. При этом значение геометрического фактора ухудшения точности определения двухмерных координат не должно превышать HDOP ≤ 4 или пространственных координат PDOP ≤ 6 в соответствии с [8], [9].
5.3.3.2 Точность в динамическом режиме
Точность в динамическом режиме НАП ГЛОНАСС/GPS должна быть такой, чтобы погрешность определения местоположения движущегося судна в горизонтальной плоскости с вероятностью 95 % не превышала 15 м без использования КИ дифференциальной подсистемы и 10 м с вероятностью 95 % с использованием КИ дифференциальной подсистемы. Значение геометрического фактора ухудшения точности определения двухмерных координат HDOP ≤ 4 или пространственных координат PDOP ≤ 6 в условиях окружающей обстановки и состоянии моря, при котором осуществляется эксплуатация судов в соответствии с [6].
5.3.4 Поиск сигналов
НАП ГНСС ГЛОНАСС/GPS должна обеспечивать возможность:
- автоматического выбора сигналов, излучаемых спутниками для определения координат места с требуемой точностью и дискретностью;
- получения первого отсчета координат с требуемой точностью в течение 30 мин при отсутствии в памяти альманаха данных;
- получения первого отсчета координат с требуемой точностью в течение 5 мин при наличии в памяти НАП альманаха данных.
НАП ГНСС ГЛОНАСС/GPS должна осуществлять повторный поиск:
- сигналов и расчет обсервованных координат с требуемой точностью в течение 5 мин при прерывании приема сигналов на период до 24 ч, но без перерывов питающего напряжения;
- сигналов и расчет обсервованных координат с требуемой точностью в течение 2 мин при перерывах питающего напряжения на время до 60 с.
Поиск сигналов осуществляется в процессе приема и обработки сигналов спутников ГЛОНАСС/GPS с целью определения координат места с требуемой точностью.
Существуют четыре условия работы НАП ГЛОНАСС/GPS, при которых должны удовлетворяться указанные требования.
Условие А (холодный старт, отсутствие данных альманаха спутников)
Такая установка требуется в тех случаях, когда приемная аппаратура:
- перемещается на большие расстояния (от 1000 до 10000 км) при выключенном питании или отсутствии сигналов ГЛОНАСС/GPS;
- выключена на время более 7 сут;
- не принимает сигналы более 7 сут.
Условие Б (горячий старт, наличие данных альманаха спутников)
При нормальной работе НАП питание прерывается на время до 24 ч.
Условие В. Перерывы приема сигналов систем ГЛОНАСС/GPS
При нормальной работе НАП прекращается прием сигналов спутников ГЛОНАСС и GPS на время до 24 ч, но без перерыва питающего напряжения.
Условие В. Кратковременные перерывы напряжения питания на время, не превышающее 60 с
Для любых условий, приведенных выше, вмешательства оператора не требуется, за исключением включения напряжение питания и обеспечения минимального затенения антенн для уверенного приема сигналов ГЛОНАСС/GPS.
В таблице 1 приведены требуемые временные пределы, в течение которых аппаратура должна автоматически произвести поиск спутниковых сигналов, произвести их обработку и выдать информацию о местоположении антенны.
Таблица 1 - Требуемое время поиска сигналов (мин)
|
А |
Б |
В |
|
|
Предельное время поиска, мин |
5 |
1 |
1 |
5.3.5 Меры защиты
5.3.5.1 Антенный вход и входные/выходные порты
В НАП ГЛОНАСС/GPS должны быть предусмотрены меры защиты, исключающие возможность повреждения приемной аппаратуры в случаях короткого замыкания или заземления на корпус антенного входа или любых входных/выходных портов на время до 5 мин.
5.3.5.2 Электромагнитная совместимость
НАП ГЛОНАСС/GPS должна соответствовать требованиям ГОСТ Р МЭК 60945 в части помехоустойчивости и электромагнитной совместимости с другим судовым оборудованием.
5.3.6 Конструкция антенны
Конструкция антенны должна быть удобной для установки на судне в таком месте, где обеспечивается хорошая видимость созвездий спутников.
5.3.7 Чувствительность и динамический диапазон
Объединенная НАП должна обеспечивать поиск и обработку сигналов спутников ГЛОНАСС и GPS при изменении их уровней на входе от минус 130 дБмВт до минус 120 дБмВт, измеренных в полосе 3 дБ на выходе линейно поляризованной приемной антенны. После завершения поиска сигналов НАП должна обеспечивать слежение за сигналами спутников при понижении их уровней до минус 133 дБмВт.
5.3.8 Помехозащищенность
Приемная аппаратура должна удовлетворять следующим требованиям:
а) в нормальных условиях работы, с подключенной антенной, во включенном состоянии антенна подвергается облучению на частоте 1636,5 МГц с плотностью потока мощности 3 Вт/м2 на время 10 мин.
При прекращении воздействия мешающего излучения и обеспечения нормального приема сигналов ГЛОНАСС/GPS НАП без вмешательства оператора должна через 5 мин обеспечить расчет координат места;
Примечание - Это облучение эквивалентно облучению антенны НАП ГЛОНАСС/GPS электромагнитным излучением антенны спутниковой системы связи ИНМАРСАТ, установленной на расстоянии 10 м вдоль ее электрической оси.
б) в нормальном рабочем режиме, т.е. при включенном питании и подключенной антенне, НАП подвергается облучению пачкой из 10 импульсов с длительностью 1,0 - 1,5 мкс при скважности 1600, с частотой заполнения импульсов в пределах 2,9 - 3,1 ГГц, при плотности потока мощности 7,5 кВт/м2. Такие условия сохраняются в течение 10 мин с периодом повторения пачек импульсов 3 с. После отключения сигнала помехи и обеспечения нормального приема спутниковых сигналов НАП ГЛОНАСС/GPS без дальнейшего вмешательства оператора в пределах 5 мин должна рассчитать достоверные координаты местоположения испытуемого оборудования.
Примечание - Данные условия эквивалентны облучению антенны НАП ГЛОНАСС/GPS судовой антенной РЛС диапазона «S», работающей с номинальной длительностью импульсов 1,2 мкс, с частотой повторения 600 импульсов/с, использующей щелевую антенну длиной 4 м со скоростью вращения 20 об/мин, а антенна НАП ГЛОНАСС/GPS размещается в плоскости апертуры антенны РЛС на расстоянии 10 м от центра ее излучения.
В руководстве по эксплуатации НАП должны содержаться рекомендации по соответствующей установке антенны для минимизации помех от другого радиооборудования (морские РЛС, ИНМАРСАТ и т.д.).
5.3.9 Дискретность выдачи данных
НАП ГНСС ГЛОНАСС/GPS должна обеспечивать расчет обсервованных координат и выдачу новых данных на дисплей и цифровой интерфейс с дискретностью не более 1 с.
Примечание - Для высокоскоростных судов выдача новых данных рекомендуется с дискретностью 0,5 с. НАП систем ГЛОНАСС/GPS должна обеспечивать минимальное разрешение отображаемых географических координат, т.е. широты и долготы в 0,001 мин.
5.3.10 Дифференциальный режим работы
НАП ГЛОНАСС/GPS должна обеспечивать возможность приема и обработки сигналов поправок дифференциальной подсистемы GPS (DGPS) и ГЛОНАСС (ДГЛОНАСС) в соответствии с требованиями].
Если НАП ГЛОНАСС/GPS оборудована приемником дифференциальных поправок, погрешность определения места в статическом и динамическом режимах работы не должна превышать 10 м (для вероятности 95 %) при наличии интегрального контроля (см. 5.3.3.1 и 5.3.3.2).
5.3.11 Предупреждения о неисправностях и индикация состояния
НАП ГЛОНАСС/GPS должна обеспечивать индикацию о неисправности, если рассчитанные координаты места не отвечают технико-эксплуатационным требованиям настоящего стандарта.
5.3.11.1 Общие положения
НАП ГЛОНАСС/GPS должна обеспечивать, как минимум:
а) индикацию в пределах 5 с, если:
- величина геометрического фактора HDOP превысила установленный предел или
- новые координаты места рассчитаны за время, превышающее 1 с.
Примечание - Для высокоскоростных судов выдача новых данных рекомендуется с дискретностью 0,5 с. До восстановления нормальной работы НАП на дисплее должны отображаться координаты и время последней правильной обсервации с визуальной индикацией признака причины прекращения обсерваций;
б) предупреждение о невозможности определения координат и индикацию статуса дифференциального режима работы ДГЛОНАСС и DGPS в случае:
- приема сигналов дифференциальных поправок и
- использования дифференциальных поправок при расчете отображаемых координат места судна;
в) представление на экране информации о приеме текстового сообщения ДГЛОНАСС/DGPS, передаваемого ККС. Вывод сообщения на экран осуществляется по запросу оператора.
5.3.12 Использование алгоритма RAIM для контроля целостности
Приемная аппаратура систем ГЛОНАСС/GPS должна включать алгоритм контроля целостности для обнаружения неисправностей, например автономный контроль целостности в приемнике (RAIM) или подобные средства, позволяющие определить, что точность определения координат места отвечает данным эксплуатационным требованиям настоящего стандарта и обеспечивает индикацию контроля целостности.
Для текущих значений принятых уровней точности определения места с доверительной вероятностью 95 %, индикация должна выражаться в виде трех состояний: «безопасное», «предупреждение» и «опасное». Уровни точности должны включать значения 10 м и 100 м. Могут обеспечиваться также дополнительные уровни точности. Для индикации состояний производитель аппаратуры может использовать различные цвета.
Если в НАП это предусмотрено, необходимо использовать следующие цвета: «безопасное» - зеленый, «предупреждение» - желтый и «опасное» - красный.
«Безопасное» и «опасное» состояния используются для представления результатов расчета контроля целостности по отношению к индицируемому порогу точности, который соответствует режиму 10 или 100 м.
Индикация состояния «Предупреждение» используется в случае, когда для надежного расчета целостности с доверительной вероятностью 95 % информации недостаточно.
Вероятность ложной тревоги > 5 % или вероятность ошибочного определения координат > 5 % должны приводить к включению индикации «предупреждение».
Состояние целостности должно непрерывно отображаться совместно с индикацией выбранного уровня точности. Должна обеспечиваться возможность передачи состояния о целостности в другие навигационные устройства в соответствии с требованиями о выходных данных, изложенных в 5.3.2.
5.3.12.1 Использование ДГЛОНАСС/DGPS для автономного контроля целостности ГНСС ГЛОНАСС/GPS
НАП ГЛОНАСС/GPS должна обеспечивать, как минимум, контроль состояния целостности систем ГЛОНАСС и GPS, используя информацию ДГЛОНАСС/DGPS.
Если поправка псевдодальности и скорость изменения псевдодальности до спутника выходят за пределы двоичного кода, которые определены в [7], сообщения типов 1, 9, 31 и 34 будут показывать объединенному приемнику ГЛОНАСС/GPS, что спутник не должен использоваться для определений.
5.3.12.2 Целостность ДГЛОНАСС/DGPS и аварийное состояние
НАП ГЛОНАСС/GPS должна обеспечивать как минимум индикацию целостности дифференциальных подсистем ДГЛОНАСС, DGPS и аварийное состояние этих подсистем.
Функции, которые должны использоваться в любом приемнике ГЛОНАСС/GPS со встроенным приемником поправок ДГЛОНАСС/DGPS или в объединенной НАП ГЛОНАСС/GPS с подключенным внешним приемником поправок.
В дифференциальном режиме работы НАП ГЛОНАСС/GPS должна индицировать информацию о целостности ДГЛОНАСС и DGPS:
а) если поправки ДГЛОНАСС или DGPS не принимаются в течение 10 с;
б) если в ручном режиме выбора номера станции, данная станция неисправна, не контролируется или качество сигнала поправок ниже установленного порога;
в) если в автоматическом режиме выбора номера станции, данная станция неисправна, не контролируется или качество сигнала поправок ниже установленного порога.
5.3.13 Выходные данные о путевом угле, скорости относительно грунта и времени UTC
НАП систем ГЛОНАСС/GPS должна обеспечивать расчет, представление на дисплей и выдачу на цифровой интерфейс данных о COG, SOG и времени UTC. Такие выходные данные должны иметь отметку времени, привязанную к данным о местоположении.
Требования к точности для путевого угла и скорости относительно грунта должны быть не ниже соответствующих эксплуатационных требований, предъявляемым к гирокомпасам (и устройствам для измерения скорости и пройденного расстояния в пределах ограничений измерений, обеспечиваемых системами ГЛОНАСС и GPS).
5.3.13.1 Точность измерения путевого угла
Ошибка измерения путевого угла (линия перемещения координат антенны относительно грунта), обусловленная действительной скоростью судна относительно грунта, не должна превышать значений, приведенных в таблице 2.
Таблица 2 - Точность измерения путевого угла
|
Точность определения путевого угла для потребителя |
|
|
от 0 до ≤ 1 узла |
Ненадежна или непригодна |
|
от > 1 до ≤ 17 узлов |
±3° |
|
17 узлов |
±1° |
Вследствие ограничений НАП ГЛOHACC/GPS, определяемых настоящим стандартом, требования к ошибкам измерения путевого угла при резкой качке не включены. Данные ограничения должны быть показаны производителем аппаратуры в инструкции по эксплуатации.
5.3.13.2 Информация о точности измерения скорости относительно грунта
Погрешность SOG (скорость перемещения координат антенны относительно грунта) не должна превышать 2 % от истинной скорости или 0,2 узла, в зависимости от того, что больше.
5.3.13.3 Доступность и достоверность информации о времени UTC
НАП систем ГЛОНАСС/GPS должна обеспечивать выдачу на цифровой интерфейс всемирного координированного времени с разрешением до 0,01 с.
Метка времени цифрового интерфейса содержится в навигационном предложении GGA и GNS.
Метка времени должна использоваться для подтверждения достоверности данных цифрового интерфейса о времени UTC, которое содержится в сообщении ZDA.
5.3.14 Типичная помеховая обстановка
НАП систем ГЛОНАСС/GPS должна быть способной удовлетворительно работать в условиях воздействия типичных помех.
Эти требования указаны в приложении А (подраздел А.1), а порядок испытаний - в приложении А (подраздел А.2).
6 Методы испытаний и требуемые результаты
6.1 Общие положения
Разработчик аппаратуры, если не оговорено особо, должен представить на испытание объединенную приемную аппаратуру систем ГЛОНАСС/GPS и гарантировать ее нормальную работу до начала испытаний.
Разработчик вместе с аппаратурой должен представить полный комплект технической документации.
Во время выполнения всех испытаний, указанных в настоящем разделе, для последующей оценки и анализа обязательно должна регистрироваться следующая информация:
- координаты местоположения судна;
- путевой угол, скорость относительно грунта и время;
- состояние индикации и предупредительной сигнализации.
6.2 Последовательность испытаний
Последовательность проведения испытаний не определяется. До начала испытаний последовательность испытаний согласовывается между испытательной лабораторией и поставщиком оборудования.
Различные пункты программы испытаний могут выполняться одновременно. Разработчик вместе с аппаратурой должен представить полный комплект технической документации.
Необходимо предусмотреть дополнительные данные для обеспечения выполнения отдельных пунктов программы испытаний, которые при нормальной работе НАП не используются (например, способы стирания альманаха данных при проведении испытаний по 6.6.5).
6.3 Стандартные сигналы при проведении испытаний
Целью испытаний является подтверждение, что параметры НАП ГЛОНАСС/GPS соответствуют минимальным требованиям раздела 5 путем проведения испытаний для различных условий окружающей среды.
Данные испытания должны проводиться с использованием реальных сигналов систем ГЛОНАСС и GPS.
При испытаниях могут использоваться другие методы имитации сигналов, при условии, что имитатор, вырабатывая сигналы, идентичные сигналам систем ГЛОНАСС и GPS, включает в себя устройства имитации шума, обеспечивает требуемый уровень сигналов спутников и формирует оптимальные созвездия спутников.
Проверка характеристик - укороченная версия испытаний точности в статическом режиме (см. 6.6.4.1), при которых требуется выполнить минимум 100 измерений за время 5 - 10 мин, исключая результаты измерений с геометрическим фактором HDOP > 4. Координаты антенны НАП должны быть определены с погрешностью < 100 м для вероятности 95 % относительно точки привязки антенны.
Контрольный сигнал А
Сигнал представляет последовательность девяти сообщений (тип 9-3) для GPS, которые определены в [9] и одного сообщения 7-го типа, которые обеспечивают непрерывную проверку данных на четность. Номер станции тестового сигнала «А» должен быть таким же, как номер станции, который хранится в альманахе.
Контрольный сигнал В
Сигнал должен содержать сообщения типов 9-3 и 3, определенных в [9], для станции В. Номер станции тестового сигнала В не должен совпадать с номером станции, который хранится в альманахе.
6.4 Определение точности
В процессе определения точности расчета координат с помощью НАП необходимо учитывать геометрический фактор используемого созвездия. Величина HDOP определяет приемлемое созвездие спутников для его использования в процессе испытаний оборудования. Если величина HDOP < 4, условия испытаний нормальные. Если величина HDOP лежит в пределах 4 - 6, результаты измерений могут быть недостоверными. При значении HDOP > 6 измерения необходимо прервать до установления требуемого значения величины геометрического фактора.
Цель испытаний по оценке точности - установить, что координаты, рассчитанные с помощью НАП в статических и динамических условиях работы, соответствуют или лучше характеристик, изложенных в стандарте минимальных требований.
При использовании имитатора сигналов порог HDOP должен быть < 4 или PDOP ≤ 6.
6.5 Организация испытаний
6.5.1 Окружающие условия при проведении испытаний
6.5.1.1 Нормальные условия проведения испытаний
Испытания, проводимые в нормальных условиях, определяются следующими параметрами:
- температура от 10 °С до 35 °С;
- относительная влажность в пределах от 20 % до 70 %.
Примечание - В случае когда испытания проводятся в условиях, которые отличаются от указанных выше, в акте испытаний необходимо указать реальные значения температуры и относительной влажности.
6.5.1.2 Экстремальные условия проведения испытаний
Выполняется проверка характеристик в экстремальных условиях внешней среды и параметрах электропитания в соответствии с ГОСТ Р МЭК 60945.
Части оборудования, относящиеся к классу X, т.е. предназначенные для установки на открытой палубе, например антенна НАП, должны испытываться при условиях окружающей среды, указанных в ГОСТ Р МЭК 60945 (класс X).
6.5.2 Испытания в статическом режиме
Антенна НАП должна размещаться в соответствии с рекомендациями разработчика по установке антенны, в точке на 1 - 1,5 м выше горизонтальных проводящих электричество поверхностей. Антенну необходимо устанавливать в таком месте, где обеспечивается возможность приема сигналов от спутников с любых направлений, с углами возвышения над горизонтом от 5° до 90°. Местоположение антенны должно быть известно с точностью не хуже 0,1 м (Р = 0,95) для трехмерных координат - х, у, z. Максимальные длины кабелей в процессе испытаний должны соответствовать требованиям разработчика.
При испытаниях в статическом режиме должны использоваться реальные сигналы ГЛОНАСС/GPS.
6.6 Результаты испытаний
6.6.1 Проверка комплектации объединенной приемной аппаратуры систем ГЛОНАСС/GPS
Проверяется комплектация приемной аппаратуры систем ГЛОНАСС/GPS и документация, представленная разработчиком.
6.6.2 Отображаемые данные на дисплее
При испытаниях НАП отображаемые данные на дисплее должны соответствовать объему и виду, указанному в документации разработчика.
6.6.3 Выходная информация
Информация на выходе НАП, предназначенная для внешнего обмена данных с другим судовым оборудованием, должна соответствовать 5.3.2. Оценка производится на основе проверки технической документации и испытаний электрических стыков.
6.6.4 Точность определения места
6.6.4.1 Статический режим работы
1 Стандартный режим работы систем ГЛОНАСС/GPS
Период наблюдений при измерении координат должен составлять не менее 24 ч. Погрешность определения координат в горизонтальной плоскости не должна превышать 15 м для вероятности 95 %, исключая измерения, полученные при значениях геометрического фактора HDOP > 4.
2 Дифференциальный режим работы ГЛОНАСС/GPS
Измерения координат местоположения должны производиться 1 раз в секунду на интервале времени не менее 24 ч. Погрешность определения координат в горизонтальной плоскости не должна превышать 10 м для вероятности 95 %.
Горизонтальные координаты антенны должны быть известны с погрешностью не хуже 0,1 м в системе координат, используемой для формирования дифференциальных поправок. Передаваемые сигналы дифференциальных поправок должны соответствовать требованиям [7].
6.6.4.2 Наклонения антенны
Испытания в статическом режиме по 6.6.4.1 повторяются для условий наклонения антенны на ± 22,5° (имитация качки судна) с периодом около 8 с.
Результаты измерений должны соответствовать данным, полученным по 6.6.4.1.
6.6.4.3 Динамический режим работы
1 Стандартный режим работы ГНСС ГЛОНАСС/GPS
Испытания по проверке точности в динамическом режиме работы должны производиться в условиях, изложенных в [7] - Х-направление (бортовая качка) - 5 м/с2 и Y-направление (килевая качка) - 6 м/с2 для всех классификаций окружающей среды.
При использовании имитатора сигналов его характеристики должны точно соответствовать требуемым параметрам сигналов, а величины ускорений должны соответствовать величинам, приведенным ниже.
Результаты испытаний должны соответствовать данным, приведенным в перечислениях а) и б).
При использовании имитатора сигналов, примеры получения этих ускорений приведены ниже:
а) после полной синхронизации НАП перемещается по прямой линии, не менее 1,2 мин, со скоростью (48 ± 2) узла, которая снижается до 0 узлов в течение 5 с. Через 10 с после полной остановки НАП погрешность не должна превышать ± 15 м относительно координат неподвижной точки;
б) после полной синхронизации НАП перемещается по прямой линии на отрезке не менее 100 м со скоростью (24 ± 1) узла, за время не менее 2 мин, с использованием метода сглаживания при уклонении в любую сторону от линии пути более 2 м, с периодом 11 - 12 с.
Приемная аппаратура не должна терять синхронизацию и продолжать рассчитывать истинные координаты в пределах полосы 30 м, относительно средней линии направления движения в течение, не менее 2 мин.
Для всех методов испытаний, указанных выше, установившиеся координаты определяются одним из следующих методов:
- в конце отрезка пути устанавливается НАП, характеристики которой идентичны испытываемой НАП, а погрешность определяется путем сравнения координат или
- путем подачи на вход НАП опорного сигнала от имитатора.
2 Дифференциальный режим работы ГЛОНАСС/GPS
Испытания по проверке точности в динамическом режиме работы должны проводиться в условиях, изложенных в [6].
Х-направление (бортовая качка) - 5 м/с2 и Y-направление (килевая качка) - 6 м/с2 для всех классификаций окружающей среды.
Примеры, которые относятся к данным ускорениям:
а) после полной синхронизации НАП перемещается по прямой линии не менее 1,2 мин, со скоростью (48 ± 2) узла, которая снижается до 0 узлов в течение 5 с. Через 10 с после полной остановки НАП погрешность не должна превышать ± 10 м относительно истинных координат в неподвижной точке, а через 10 с после полной остановки погрешность должна быть в пределах ± 2 м;
б) при использовании имитатора характеристики имитируемых сигналов должны соответствовать сигналам, указанным в примере а).
Для всех методов испытаний, указанных в примерах а) и б), истинные и установившиеся координаты определяются одним из следующих способов:
- для указанного в примере а) установившиеся координаты должны определяться путем усреднения 15-ти последовательных отсчетов координат, следующих после 10 с периода установления, а истинные координаты в точке остановки должны измеряться с точностью 1 м;
- для указанного в примере б) путем подачи на вход сигнала от имитатора, обеспечивающего точность в пределах 1 м.
Условие А (холодный старт, отсутствие данных альманаха спутников)
Первоначальная установка исходных данных
Проверка данного параметра производится следующими способами:
а) вводом ошибочных начальных координат точки, удаленной от места испытаний на расстояние более 1000 км, но не более 10000 км (или использование обновления текущего альманаха) или
б) отключение НАП от сети питающего напряжения на время менее 7 сут.
Проверка характеристик должна выполняться после истечения предельного времени, указанного в таблице 1.
Условие Б (горячий старт, наличие данных альманаха спутников)
Перерывы питающего напряжения
При нормальной работе приемная аппаратура отключается от сети питающего напряжения на время 24 - 25 ч.
Проверка характеристик должна выполняться после истечения предельного времени, указанного в таблице 1.
Условие В
Перерывы приема сигналов систем ГЛОНАСС/GPS
При нормальной работе НАП производится полное затенение антенны на время 24 - 25 ч.
Проверка характеристик должна выполняться после истечения предельного времени, указанного в таблице 1.
Условие Г
Кратковременные прерывания питающего напряжения
При нормальной работе НАП производится прерывание питающего напряжения на время 60 с. После этого электропитание НАП восстанавливается. Проверка характеристик НАП производится по истечении промежутка времени, указанного в таблице 1.
6.6.6 Меры защиты
6.6.6.1 Антенный вход и входные/выходные порты
Антенный вход приемника соединяется с землей на время до 5 мин. В конце этого периода антенна и входные/выходные порты подключаются нормально и проверяются характеристики НАП с целью обнаружения повреждений.
6.6.6.2 Электромагнитная совместимость
Испытания выполняются по методике, изложенной в ГОСТ Р МЭК 60945.
6.6.7 Конструкция антенны
Конструкция антенны проверяется на соответствие представленной разработчиком технической документации с целью проверки возможности ее установки на судне в месте, где обеспечивается уверенный прием сигналов созвездия спутников систем ГЛОНАСС/GPS с любых направлений.
6.6.8 Чувствительность и динамический диапазон
6.6.8.1 Поиск сигналов
Уровни принимаемых сигналов контролируются с помощью специального приемника. Должна быть предусмотрена возможность подавления сигналов и регулировки их уровней в диапазоне минус (125 ± 5) dВмВт. Проверяются характеристики НАП, которые должны удовлетворять требованиям стандарта при данном изменении уровня сигналов.
Данная проверка может также выполняться с помощью имитатора.
6.6.8.2 Слежение
Уровни принимаемых сигналов контролируются с помощью специального приемника. Должна быть предусмотрена возможность подавления сигналов и регулировки их уровней до величины минус 133 дБмВт. Характеристики НАП должны удовлетворять требованиям стандарта при данном изменении уровня сигналов.
Данная проверка может также выполняться с помощью имитатора.
6.6.9 Влияние характерных сигналов помех
6.6.9.1 Помехи в L диапазоне частот
При нормальной работе антенна НАП подвергается облучению на частоте 1636,5 МГц с плотностью потока мощности 3 Вт/м2. Время облучения составляет 10 мин. После прекращения воздействия мешающего сигнала производится проверка характеристик НАП в течение 5 мин.
6.6.9.2 Помехи в S диапазоне частот
При нормальной работе антенна НАП подвергается облучению пачкой из 10 импульсов, каждый длительностью 1 - 1,5 мкс, со скважностью 1600, в диапазоне частот 2,9 - 3,1 ГГц и плотностью потока мощности 7,5 кВт/м2. Время облучения 10 мин с периодом повторения пакетов импульсов 3 с.
Примечание - Пиковая плотность мощности, измеренная на НАП, составляет 7,5 кВт/м и приближенно соответствует средней плотности 4,7 Вт/м при неподвижной излучающей антенне.
После прекращения воздействия мешающего сигнала производится проверка характеристик НАП в течение 5 мин.
6.6.10 Частота обновления координат местоположения
6.6.10.1 Частота обновления координат для малых скоростей движения
НАП размещается на платформе, которая двигается по прямой линии со скоростью (5 ± 1) узел. В течение 10 мин проверяются выходные координаты НАП с интервалами 10 с. Выходные координаты должны каждый раз обновляться. Проверка может выполняться с использованием имитатора.
6.6.10.2 Частота обновления координат для высоких скоростей движения
НАП размещается на платформе, которая перемещается по прямой линии со скоростью (50 ± 5) узлов. Выходные координаты НАП должны проверяться с интервалами в 1 с в течение 10 мин. Выходные координаты НАП должны каждый раз обновляться. Данная проверка может выполняться с использованием имитатора сигналов для скорости 70 узлов на интервале 0,5 с.
Минимальное разрешение отображаемых географических координат, т.е. широты и долготы, оценивается в процессе проверки 6.6.10.1 и 6.6.10.2.
6.6.11 Дифференциальный вход
Документация разработчика должна быть проверена с целью:
а) подтверждения, что объединенная НАП ГЛОНАСС/GPS правильно обрабатывает сообщения в соответствии с требованиями [5], и
б) подтверждения, что:
1) сигналы ДГЛOHACC/DGPS принимаются, и статус дифференциального режима индицируется на дисплее;
2) дифференциальные поправки ДГЛОНАСС/DGPS учитываются в отображаемых координатах места судна.
6.6.12 Предупреждения об отказах и статус индикации
Предупреждения об отказах и статус индикаторов фиксируются при проверке статических и динамических характеристик.
Они должны соответствовать условиям, которые индицируются на дисплее НАП на момент проверки.
Испытания по расчету целостности
Для стабилизации временного интервала, на котором производится проверка целостности, объединенная НАП ГЛОНАСС/GPS устанавливается в режим слежения за спутниками на время 10 мин.
Используя 5 спутников, целостность может быть оценена в дифференциальном режиме работы с помощью изменения величины поправки для одного из спутников путем увеличения скорости поправки.
Эта введенная ошибка должна приводить к ухудшению точности обсервации и выполняется до тех пор, пока ошибка координат места не станет больше, чем установленный уровень точности. Индикаторы контроля целостности будут индицировать состояние и переходить от «безопасного» к «предупреждению», а затем к «опасному» состоянию. Для определения совпадения с требованиями по целостности данные сравниваются с истинной ошибкой местоположения на эти моменты. Необходимо провести, как минимум, 10 проверок путем введения ошибок для различных спутников. Выполняются 2 сеанса наблюдений, разделенных по времени на 3 ч, что считается достаточным для проверки функции целостности. Испытания могут проводиться с использованием имитатора сигналов путем изменения метки времени в спутнике. При использовании созвездия спутников от имитатора необходимо использовать текущий альманах, чтобы имитировать реальное созвездие спутников.
Проверка целостности ДГНСС
НАП ГЛОНАСС/GPS должна быть подключена к приемнику поправок и работать в дифференциальном режиме ДГЛОНАСС/DGPS. Приемник поправок должен работать в ручном режиме выбора частоты.
Следует подключить контрольный сигнал А на вход приемника поправок ДГЛОНАСС/DGPS.
Проверить работу НАП ГЛОНАСС/GPS.
Убедиться, что НАП работает в дифференциальном режиме определения координат (т.е. анализирует поток данных навигационного предложения GNS и установлен индикатор режима = D).
Выключить контрольный сигнал А.
Наблюдать за появлением на дисплее НАП информации «Потеря сигнала» в течение 10 с и за автоматическим переключением НАП в режим ГЛОНАСС/GPS (т.е. анализируется поток данных навигационного предложения GNS и установлен индикатор режима = А).
НАП ГЛОНАСС/GPS должна быть подключена к приемнику поправок и работать в дифференциальном режиме ДГЛОНАСС/DGPS. Приемник поправок должен работать в ручном режиме выбора частоты.
Подключить контрольный сигнал А на вход приемника поправок ДГЛОНАСС/DGPS.
Проверить работу НАП ГЛОНАСС/GPS.
Убедиться, что НАП работает в дифференциальном режиме определения координат (т.е. анализирует поток данных навигационного предложения GNS и установлен индикатор режима = D).
Установить статус сигнала А «неработоспособен».
Наблюдать за появлением на дисплее информации «Потеря сигнала» в течение 10 с и за автоматическим переключением НАП в режим ГЛОНАСС/GPS (т.е. анализируется поток данных навигационного предложения GNS и установлен индикатор режима = А).
Повторить испытания, установив статус сигнала А «не контролируется».
Повторить испытания, понизив коэффициент качества сигнала ниже величины порога, WER > 0,1.
НАП ГЛОНАСС/GPS должна быть подключена к приемнику поправок и работать в дифференциальном режиме ДГЛОНАСС/DGPS.
Приемник поправок должен работать в автоматическом режиме выбора частоты станции.
Контрольный сигнал А доступен в частотном диапазоне. Подключить тест-сигнал А на вход приемника поправок ДГЛОНАСС/DGPS.
Проверить работу НАП ГЛОНАСС/GPS.
Убедиться, что НАП работает в дифференциальном режиме определения координат (т.е. НАП анализирует поток данных навигационного предложения GNS и установлен индикатор режима = D).
Установить статус сигнала А «неработоспособен».
Наблюдать за появлением на дисплее НАП информации «Потеря сигнала» в течение 10 с и за автоматическим переключением НАП в режим ГЛОНАСС/GPS (т.е. НАП анализирует поток данных навигационного предложения GNS и установлен индикатор режима = А).
Повторить испытания, установив статус сигнала А «не контролируется».
Повторить испытания, понизив коэффициент качества сигнала ниже величины порога, WER > 0,1.
Контроль целостности GPS с помощью дифференциального режима DGPS
НАП GPS должна быть подключена к приемнику поправок и работать в дифференциальном режиме DGPS.
Подключить контрольный сигнал А на вход приемника поправок DGPS.
Проверить работу НАП GPS.
Убедиться, что НАП работает в дифференциальном режиме определения координат (т.е. НАП анализирует поток данных навигационного предложения GGA и установлен режим «GPS = 2»).
Далее проверить статус спутников, использующихся для определения координат (т.е. анализируется поток данных навигационного предложения GSA).
Установить величину псевдодальности и скорость изменения псевдодальности для определенного реального спутника или для имитируемого созвездия выше порога.
Убедиться, что в НАП данный спутник исключен при решении задачи определения координат (т.е. анализируется поток данных навигационного предложения GSA).
Повторить испытания для данного спутника, установив статус «неработоспособен».
Убедиться, что в НАП данный спутник исключен при решении задачи определения координат (т.е. анализируется поток данных навигационного предложения GSA).
Текст сообщения на дисплее
НАП ГЛОНАСС/GPS должна быть подключена к приемнику поправок и работать в дифференциальном режиме ДГЛОНАСС/DGPS.
Включить контрольный сигнал А и убедиться, что НАП ГЛОНАСС/GPS и приемник поправок ДГЛОНАСС/DGPS функционируют нормально.
Проверить работу НАП ГЛОНАСС/GPS.
Убедиться, что НАП принимает текстовое сообщение, а его содержание индицируется на дисплее.
6.6.13 Выходные данные о путевом угле и скорости относительно грунта
Методы испытаний для проверки точности расчета путевого угла и скорости
НАП ГЛОНАСС/GPS должна быть включена, а выходные данные, индицирующие путевой угол должны контролироваться. Испытания должны проводиться при движении судна постоянным курсом на переднем ходу со скоростью 0 - 1 узел. Через 10 с после установления заданной скорости в течение 2 мин производятся измерения путевого угла. Испытания повторяются для всего диапазона скоростей, указанного в таблице 2.
Требуемые результаты испытаний
Разность между истинным и измеренным значениями путевого угла на каждом цикле испытаний не должна превышать значений, указанных в таблице 2. Разность между истинным и измеренными значениями скорости относительно грунта на каждом цикле испытаний не должна превышать 2 % от истинного значения скорости или 0,2 узла, в зависимости, что больше.
Достоверность информации о путевом угле и скорости относительно грунта
Отметка времени о координатах местоположения, которая содержится в навигационном сообщении GNS цифрового интерфейса [5] должна использоваться для подтверждения достоверности величин COG и SOG в навигационном предложении VTG цифрового интерфейса [5].
Метод испытаний
Проверить цифровой интерфейс на соответствие [5]. При нормальной работе НАП ГЛОНАСС/GPS изменить координаты места судна путем уменьшения числа используемых спутников. Проверить содержание сообщений в навигационных предложениях GNS и VTG.
Результаты испытаний
Убедиться, что признак достоверности в навигационном предложении GGA, DNS в соответствии с [5] отображается как «неработоспособный».
Убедиться, что информация о путевом угле COG и скорости SOG, которая содержится в навигационном предложении VTG стандарта, установлена в нулевые значения.
6.6.14 Выходные данные о UTC
Метод испытаний
Проверить цифровой интерфейс на соответствие стандарту [5]. При нормальной работе НАП ГЛОНАСС/GPS изменить координаты места судна путем уменьшения числа используемых спутников до двух.
Проверить содержание сообщений в навигационных предложениях GNS и ZDA.
Результаты испытаний
Убедиться, что информация о разрешающей способности метки времени UTC, которая содержится в навигационном предложении ZDA, соответствует требованиям [5].
6.7 Проверка характеристик на соответствие требованиям ГОСТ Р МЭК 60945
Все основные требования ГОСТ РМЭК 60945, которые относятся к категории оборудования «защищенное», должны выполняться. Разработчик аппаратуры должен объявить заранее о любых необходимых условиях для проведения климатических испытаний.
Приложение А
(справочное)
А.1.1 Типовая помеховая обстановка
НАП ГЛОНАСС/GPS должна обеспечивать нормальную работу в условиях типичной помеховой обстановки. Проверки включают измерения точности в статическом режиме и времени повторного поиска сигналов в течение 30 с после прерывания приема сигналов спутников из-за затенения антенны на время 60 с или меньше.
Типичными помехами, действующими на входе НАП ГЛОНАСС/GPS, являются:
- широкополосная (шумоподобная) помеха;
- интерференция незатухающих колебаний;
- импульсные помехи.
А.1.1.1 Уровни широкополосных помех
Эталонные значения (диаграмма уровней) для широкополосной помехи изменяются в зависимости от ширины полосы помехи. Действие помехи можно представить как широкополосный шум на входе НАП, на частоте 1575,42 МГц.
Диаграмма уровней помехи в зависимости от ширины полосы показана на рисунке А.1.
А.1.1.2 Помехи при непрерывном излучении (интерференционные незатухающие колебания CWI)
Помехи с непрерывным излучением взаимодействуют с отдельными линиями спектра кода С/А в структуре сигнала GPS. Обычно приемники GPS более восприимчивы к непрерывной помехе (CWI), чем к любым другим типам помех.
Диаграмма уровней для CWI помехи представлена на рисунке А.2.
А.1.1.3 Импульсные помехи
Импульсные помехи могут возникать из-за близости РЛС или других радиочастотных устройств, использующих импульсные сигналы. Обычно приемники НАП ГЛОНАСС/GPS вполне устойчивы при воздействии импульсных помех с малым рабочим периодом. Диаграмма уровней помехи для импульсной помехи представляет собой сигнал несущей на частоте 1575 МГц с импульсной модуляцией, пиковым уровнем мощности несущей минус 20 дБмВт и коэффициентом заполнения 10 % при использовании длительности импульса 10 мс.
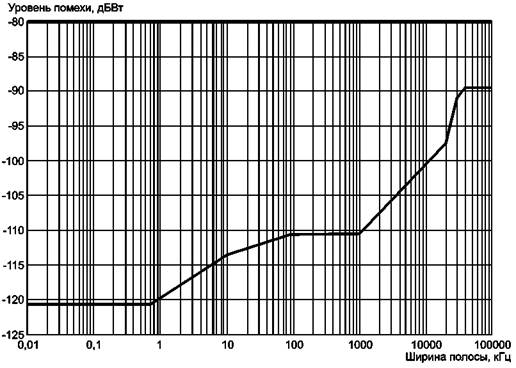
Рисунок А.1 - Диаграмма уровней широкополосной помехи в зависимости от ширины полосы
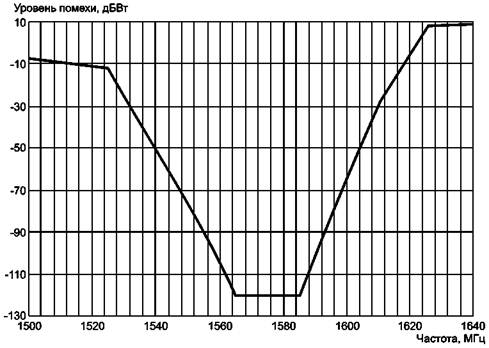
Рисунок А.2 - Диаграмма уровней помехи при непрерывном излучении
А.2.1 Порядок испытаний при воздействии помех
Порядок испытаний при воздействии помех, представленный в данном разделе, соответствует порядку испытаний, который используется разработчиками при сертификации авиационной приемной аппаратуры с целью подтверждения соответствия ее параметров требованиям стандарта RTCA. Порядок испытаний переработан и приспособлен к испытаниям морской аппаратуры ГНСС ГЛОНАСС/GPS с целью подтверждения соответствия ее параметров требованиям ГОСТ Р МЭК 60945, [12], [13], [14].
А.2.1.1 Режимы имитатора
Пять спутников по каждой системе ГЛОНАСС, GPS.
Один спутник с максимальным уровнем сигнала минус 120 дБВт плюс усиление антенны до углов возвышения спутников над горизонтом 90°.
Один спутник с минимальным уровнем сигнала минус 130 дБВт плюс усиление антенны до углов возвышения спутников над горизонтом 5°.
Три спутника с уровнем сигнала минус 127 дБВт плюс усиление антенны до углов возвышения 45°.
А.2.1.2 Проверка точности решения задачи расчета координат
Нормированная погрешность, связанная с решением навигационной задачи, должна сравниваться с требованием к горизонтальной погрешности местоопределения 10 м для вероятности (95 %) и должна рассчитываться с использованием следующей формулы
![]()
где NE - нормированная погрешность,
di - мгновенная (горизонтальная) погрешность местоопределения,
HDOPi - мгновенное снижение точности за счет геометрии, геометрический фактор.
Деление мгновенной величины ошибки 2D на 4/HDOPi позволяет нормировать результаты испытаний к постоянной величине HDOP, равной 4, и учитывать изменения положения спутника за счет изменения геометрии.
Величина HDOPi может быть определена с помощью РКПО или рассчитана. Для расчета координат должны использоваться только те спутники, которые включены в созвездие при расчете HDOPi.
А.2.1.3 Порядок проверки точности решения навигационной задачи
А.2.1.3.1 Помеховая обстановка
При испытаниях должны имитироваться виды помех, включающие широкополосную шумоподобную помеху на частоте 1575,42 МГц, интерференционные незатухающие колебания (CWI) и импульсную помеху. В испытаниях при воздействии импульсной помехи должна использоваться модулированная несущая частота с пиковым уровнем минус 20 дБмВт и коэффициентом скважности 10 %. Величины помех показаны в приведенных таблицах А.1 - А.3.
Таблица А.1 - Величины широкополосных помех
|
Суммарная среднеквадратическая мощность, дБмВт |
|
|
1 |
минус 110,5 |
Таблица А.2 - Величины импульсных помех
|
Импульсные помехи |
|
|
Частота, МГц |
Длительность импульса, мс |
|
1575,42 |
1 |
Таблица А.3 - Величины интерференционных незатухающих колебаний
|
Мощность, дБмВт |
|
|
1575,42 |
минус 120,5 |
|
1626,00 |
8 |
А.2.1.3.2 Порядок испытаний
1) Аппаратура в период испытаний должна быть подключена к источнику одной из помех.
2) Должны быть разработаны сценарии имитатора и включены сигналы спутников.
3) НАП ГЛОНАСС/GPS должна быть включена и введена в работу.
4) В процессе расчета координат с помощью НАП ГЛОНАСС/GPS на вход испытуемой аппаратуры должна быть подана помеха, уровень которой соответствует требуемой величине.
5) В установившемся режиме работы осуществляется запись 100 отсчетов координат места и величины HDOP, дискретность записи 2 мин.
6) Повторить испытания при подаче на вход других видов помех.
А.2.1.3.3 Требуемые результаты
Формулировка «выдержала испытания/отказ» определяет превышение установленного предела ошибки или пропуски измерений более 5 % от общего числа измерений.
А.2.1.4 Испытания по оценке времени повторного поиска сигналов
Метод испытаний
Испытания по оценке времени повторного поиска сигналов осуществляются с целью имитации временной потери слежения за сигналом, например из-за затенения антенны при проходе под мостами и т.д. Критерием оценки «Выдержала испытания/отказ» при измерении времени повторного поиска является выборочное испытание, когда НАП ГЛОНАСС/GPS обеспечивает расчет достоверных координат с требуемой точностью через 30 с после восстановления нормальных условий приема сигналов спутников и осуществляет слежение в течение последующих 60 с.
Таблица А.4 показывает общий порядок испытаний и требуемые результаты, а также представляет подход при их проведении с целью определения требуемого времени движения и приемлемого расстояния при движении судна передним ходом.
Таблица А.4 - Общий порядок и результаты испытаний
|
Отказы за определенное время |
Результаты испытаний |
|
|
Серия из 20 испытаний |
0 |
НАП выдержала испытания |
|
1 - 5 |
Необходимо > 20 испытаний |
|
|
6 и более |
НАП не выдержала испытания |
|
|
Серия из 20 испытаний |
0 |
НАП выдержала испытания |
|
1 - 5 (накопленные) |
Необходимо > 20 испытаний |
|
|
6 и более (накопленные) |
НАП не выдержала испытания |
|
|
Серия из 20 испытаний |
0 |
НАП выдержала испытания |
|
1 - 5 (накопленные) |
Необходимо > 20 испытаний |
|
|
6 и более (накопленные) |
НАП не выдержала испытания |
|
|
Серия из 20 испытаний |
0 |
НАП выдержала испытания |
|
от 1 до 5 (накопленные) |
Необходимо > 20 испытаний |
|
|
6 и более (накопленные) |
НАП не выдержала испытания |
|
|
Серия из 20 испытаний |
0 |
НАП выдержала испытания |
|
от 1 до 5 (накопленные) |
Необходимо > 20 испытаний |
|
|
6 и более (накопленные) |
НАП не выдержала испытания |
А.2.1.4.1 Порядок испытаний по оценке времени повторного поиска сигналов
А.2.1.4.2 Помеховая обстановка
Помеховая обстановка в период испытаний показана в таблице А.5.
Это широкополосный шум на частоте 1575,42 МГц.
Таблица А.5 - Помеховая обстановка в период испытаний
|
Параметр |
Значение |
|
Ширина полосы шума |
1 МГц |
|
Суммарная среднеквадратическая мощность |
минус 110,5 dBm |
А.2.1.4.3 Сценарии имитатора для проверки повторного поиска сигналов
А.2.1.4.4 Порядок испытаний
1) Аппаратура в период испытаний должна быть подключена к источнику широкополосной помехи.
2) Должны быть разработаны сценарии имитатора и включены сигналы спутников.
3) НАП ГЛОНАСС/GPS должна быть включена и введена в работу.
4) До выключения сигналов спутников НАП ГЛОНАСС/GPS должна работать в режиме установившейся точности измерения координат.
5) Выход имитатора отключается от НАП на время 30 с.
6) Выход имитатора подключается ко входу НАП.
7) Через 30 с производится запись координат и величины HDOP. Если через 30 с НАП не производит расчет координат, фиксируется отказ и повторяются испытания по 9).
8) Убедиться, что в последующие 60 с НАП производит расчет координат.
9) Повторить испытания по 4), если необходимо.
Примечание - Если сценарий имитатора переустановлен, некоторые модели НАП ГЛОНАСС/GPS могут потребовать стирания предыдущих данных для установления режима нормальной работы. Это происходит вследствие того, что в НАП постоянно хранится время, что приводит к невозможности работы программного обеспечения НАП из-за временной задержки.
А.2.1.4.5 Требуемые результаты
Формулировка отказ (НАП не выдержала испытание) определяет критерии работы, когда в НАП
- не производится расчет координат через 30 с;
- ошибка рассчитанных координат больше 10 м;
- координаты на выходе отсутствуют за 60 с после появления признака отказа.
Для определения критерия «выдержала испытание/отказ» при проверке времени повторного поиска сигналов необходимо использовать таблицу А.4, определяющую порядок проведения испытаний и требуемые результаты.
Библиография
|
[1] |
Международная Конвенция по охране человеческой жизни на море, СОЛАС, Глава V. Безопасность мореплавания |
|
|
[2] |
МЭК 61108-1 |
Морское навигационное оборудование и средства радиосвязи. Глобальные навигационные спутниковые системы. Часть 1. Глобальная система позиционирования (GPS). Приемная аппаратура. Стандарт требований к характеристикам, методы и требуемые результаты испытаний |
|
[3] |
МЭК 61108-2 |
Морское навигационное оборудование и средства радиосвязи. Глобальные навигационные спутниковые системы. Часть 2. Глобальная навигационная спутниковая система (ГЛОНАСС). Приемная аппаратура. Стандарт требований к характеристикам, методы испытаний и требуемые результаты испытаний |
|
[4] |
МЭК 61108-4 |
Морское навигационное оборудование и средства радиосвязи. Глобальные навигационные спутниковые системы. Часть 4. Дифференциальные подсистемы DGPS и ДГЛОНАСС. Приемная аппаратура. Стандарт требований к характеристикам, методы и требуемые результаты испытаний |
|
[5] |
МЭК 61162-2 |
Цифровые интерфейсы для судового навигационного и связного оборудования и систем |
|
[6] |
МЭК 60721-3-6 Часть 3 |
Классификация групп параметров условий окружающей среды и их пределы - условия на судах |
|
[7] |
Рекомендации МСЭ-Р.М.823 |
Технические характеристики передачи дифференциальных поправок в глобальной навигационной спутниковой системе (ГНСС) в диапазоне частот морских радиомаяков 285 - 325 кГц |
|
[8] |
Резолюция ИМО А.915 (22) |
Пересмотренные требования мореплавания в отношении будущей глобальной навигационной спутниковой системы (ГНСС) |
|
[9] |
Резолюция ИМО А.953 (23) |
Всемирная радионавигационная система |
|
Резолюция ИMO MSC.114 (73) |
Эксплуатационные требования к судовому приемному оборудованию для приема информации от морских радиомаяков, передающих дифференциальные поправки спутниковых навигационных систем GPS и ГЛОНАСС |
|
|
[11] |
Резолюция ИМО MSC.115 (73) |
Эксплуатационные требования к объединенному судовому приемному оборудованию систем ГЛОНАСС/GPS |
|
[12] |
Российский Речной Регистр |
Правила классификации и постройки судов внутреннего плавания (ПСВП) |
|
[13] |
Морской Регистр судоходства |
Правила по оборудованию морских судов. Часть V. Навигационное оборудование |
|
[14] |
Морской Регистр судоходства |
Правила квалификации и постройки морских судов |
Ключевые слова: глобальная навигационная спутниковая система, ГЛОНАСС, GPS, дифференциальные подсистемы, морская навигационная аппаратура потребителей, технические требования, методы испытаний