|
ФЕДЕРАЛЬНОЕ
АГЕНТСТВО |
||
|
|
НАЦИОНАЛЬНЫЙ |
ГОСТ Р |

Глобальная навигационная спутниковая система
ФОРМАТЫ
ПЕРЕДАЧИ КОРРЕКТИРУЮЩЕЙ
ИНФОРМАЦИИ
Технические требования
|
|
Москва |
Предисловие
Цели и принципы стандартизации в Российской Федерации установлены Федеральным законом от 27 декабря 2002 г. № 184-ФЗ «О техническом регулировании», а правила применения национальных стандартов Российской Федерации - ГОСТ Р 1.0-2004 «Стандартизация в Российской Федерации. Основные положения»
Сведения о стандарте
1. РАЗРАБОТАН Федеральным государственным унитарным предприятием «Российский научно-исследовательский институт космического приборостроения» (ФГУП « РНИКП»)
2. ВНЕСЕН Техническим комитетом по стандартизации ТК 363 «Радионавигация»
3. УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Приказом Федерального агентства по техническому регулированию и метрологии от 15 декабря 2009 г. № 936-ст
4. ВВЕДЕН ВПЕРВЫЕ
Информация об изменениях к настоящему стандарту публикуется в ежегодно издаваемом информационном указателе «Национальные стандарты», а текст изменений и поправок - в ежемесячно издаваемых информационных указателях «Национальные стандарты». В случае пересмотра, замены или отмены настоящего стандарта соответствующее уведомление будет опубликовано в ежемесячно издаваемом информационном указателе «Национальные стандарты». Соответствующая информация, уведомление и тексты размещаются также в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет
СОДЕРЖАНИЕ
НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
|
Глобальная навигационная спутниковая система ФОРМАТЫ ПЕРЕДАЧИ КОРРЕКТИРУЮЩЕЙ ИНФОРМАЦИИ Технические требования Global navigation satellite system. Formats of correction data transfer. Technical requirements |
Дата введения - 2011-01-01
1. Область применения
Настоящий стандарт распространяется на форматы передачи корректирующей информации, передаваемые наземными и широкозонными дифференциальными системами для гражданского применения глобальной навигационной спутниковой системы Российской Федерации (далее - ГЛОНАСС).
Настоящий стандарт устанавливает технические требования к наземным и широкозонным функциональным дополнениям гражданского назначения в части общих требований формирования и передачи корректирующей информации по глобальной навигационной спутниковой системе (далее - ГНСС), эксплуатируемым на территории Российской Федерации, к их составу и параметрам аппаратных и программных средств.
Данные системы предназначены для авиационного применения.
2. Нормативные ссылки
В настоящем стандарте использованы нормативные ссылки на следующие стандарты:
ГОСТ Р 52928-2008 Система спутниковая навигационная глобальная. Термины и определения
ГОСТ Р 53169-2008 Система радионавигационная «Чайка». Формат передачи контрольно-корректирующей информации потребителям глобальных навигационных спутниковых систем. Общие технические требования
Примечание - При пользовании настоящим стандартом целесообразно проверить действие ссылочных стандартов в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет или по ежегодно издаваемому информационному указателю «Национальные стандарты», который опубликован по состоянию на 1 января текущего года, и по соответствующим ежемесячно издаваемым информационным указателям, опубликованным в текущем году. Если ссылочный стандарт заменен (изменен), то при пользовании настоящим стандартом следует руководствоваться заменяющим (измененным) стандартом. Если ссылочный стандарт отменен без замены, то положение, в котором дана ссылка на него, применяется в части, не затрагивающей эту ссылку.
3. Термины и определения
В настоящем стандарте применены термины по ГОСТ Р 52928 и ГОСТ Р 53169.
4. Обозначения и сокращения
В настоящем стандарте использованы следующие обозначения и сокращения:
ГЛОНАСС - глобальная навигационная спутниковая система Российской Федерации;
ГНСС - глобальная навигационная спутниковая система;
КА - космический аппарат;
ОВЧ - очень высокие частоты;
GPS (Global Positioning System) - глобальная навигационная спутниковая система Соединенных Штатов Америки;
GBAS (Ground Based Augmentation System) - наземная система функционального дополнения, обеспечивающая радиовещательную передачу корректирующих данных;
RTCM (Radio Technical Commission for Maritime Service) - радиотехническая комиссия для морских служб;
RTCA (Radio Technical Commission for Aviation) - радиотехническая комиссия для авиации;
SBAS (Satellite Based Augmentation System) - спутниковая система функционального дополнения. Система функционального дополнения с широкой зоной действия, в которой пользователь принимает дополнительную информацию от передатчика, установленного на спутнике;
TDMA (Time Division Multiple Access) - временное разделение сигналов, временной многоканальный доступ;
RTCM (Radio Technical Commission for Maritime Service) - радиотехническая комиссия для морских служб;
RTCA (Radio Technical Commission for Aviation) - радиотехническая комиссия для авиации;
UTC (Universal Time Coordinated) - координированное всемирное время;
UTC (SU) (Universal Time Coordinated Soviet Union) - координированное всемирное время России;
VDB - радиопередача цифровых данных.
5. Технические требования
5.1. Передача корректирующей информации GBAS
5.1.1. GBAS состоит из наземных и бортовых элементов. Одна наземная подсистема (наземная станция) может поддерживать все бортовые подсистемы в пределах своей зоны действия, обеспечивая с помощью ОВЧ-радиопередачи цифровых данных (VDB) воздушные суда данными для захода на посадку, поправками и информацией о целостности для видимых спутников ГНСС. Несущая частота радиовещательной передачи данных поддерживается в диапазоне ± 0,0002 % от выделенной частоты. Сообщения GBAS формируются в виде символов, каждый из которых состоит из трех последовательных битов сообщения.
В случае необходимости формирования последнего 3-битового символа сообщения конец сообщения дополняется одним или двумя наборами битов-заполнителей, установленных в нуль. Символы преобразуются посредством сдвига фазы несущей частоты (Дфк) в соответствии с таблицей 1.
Таблица 1 - Кодирование данных
|
Символ - фазовый сдвиг |
|||
|
I3k-2 |
I3k-1 |
I3k |
Дфк |
|
0 |
0 |
0 |
0р/4 |
|
0 |
0 |
1 |
1р/4 |
|
0 |
1 |
1 |
2р/4 |
|
0 |
1 |
0 |
3р/4 |
|
1 |
1 |
0 |
4р/4 |
|
1 |
1 |
1 |
5р/4 |
|
1 |
0 |
1 |
6р/4 |
|
1 |
0 |
0 |
7р/4 |
|
Примечание - Ij представляет собой j-й бит подлежащего передаче пакета, где I1 - первый бит установочной последовательности. |
|||
5.1.2. Выходной сигнал дифференциального фазового кодирующего устройства фильтруется фильтром формирования импульса.
5.1.3. Величина вектора ошибки передаваемого сигнала не превышает 6,5 % от среднеквадратического значения (1s).
5.1.4. Скорость передачи символов поддерживается равной 10500 символов/с ± 0,005 % и обеспечивает номинальную скорость передачи информации в битах 31500 бит/с. Система многопользовательского доступа с временным разделением каналов (TDMA) базируется на кадрах и временных интервалах. Длительность каждого кадра составляет 500 мс. В каждой односекундной эпохе UTC содержится два таких кадра. Первый из указанных кадров начинается в начале эпохи UTC, а второй начинается спустя 0,5 с после начала эпохи UTC. Кадр мультиплексируется по времени таким образом, чтобы он состоял из восьми отдельных временных интервалов (А - Н) длительностью 62,5 мс. В каждом установленном временном интервале содержится не более одного пакета. Чтобы инициировать использование временного интервала (слота), GBAS передает пакет в данном временном интервале в каждом из пяти последовательных кадров. Наземная система передает пакет, как минимум, в одном из каждых пяти последовательных кадров в каждом используемом временном интервале. На каждый пакет приходится 62,5-миллисекундный временной интервал. Начало пакета имеет место через 95,2 мкс после начала временного интервала с допуском ± 95,2 мкс. Длина передачи указывает общее число передаваемых битов.
5.1.5. Типы сообщений, которые могут передаваться системой GBAS, приведены в таблице 2. В настоящее время определены только 8 из 256 доступных типов сообщений. Будущие потребности могут быть удовлетворены за счет оставшихся типов сообщений.
Таблица 2 - Сообщения, передаваемые GBAS по ОВЧ-каналу
|
Содержание сообщения |
|
|
0 |
Не занято |
|
1 |
Поправки к псевдодальностям |
|
2 |
Информация о GBAS |
|
3 |
Зарезервировано для наземных дальномерных источников |
|
4 |
Информация о конечном участке захода на посадку |
|
5 |
Прогнозируемая эксплуатационная готовность дальномерного источника |
|
6 |
Зарезервировано |
|
7 |
Зарезервировано для национальных применений |
|
8 |
Зарезервировано для проверок и испытаний |
|
9 - 255 |
Не занято |
5.1.6. Форматы сообщений GBAS. Каждое передаваемое GBAS сообщение кодируется в соответствии с форматом, определенным в таблицах 3 - 6.
Таблица 3 - Формат сообщения типа 1 с поправками к псевдодальностям
|
Число разрядов |
Диапазон значений |
Разрешающая способность |
|
|
Модифицированный Z-отсчет |
14 |
0 - 1199,9 с |
0,1 с |
|
Признак дополнительного сообщения |
2 |
0 - 3 |
1 |
|
Число измерений (N) |
5 |
0 - 18 |
1 |
|
Тип измерений |
3 |
0 - 7 |
1 |
|
Параметр декорреляции эфемерид (Р) |
8 |
0 - 1,275´10-3 м/м |
5´10-6 м/м |
|
CRC эфемерид |
16 |
- |
- |
|
Продолжительность эксплуатационной готовности источника |
8 |
0 - 2540 с |
10 с |
|
Для N блоков измерений |
|||
|
Идентификатор (ID) дальномерного источника |
8 |
1 - 255 |
1 |
|
Признак набора данных (IOD) |
8 |
0 - 255 |
1 |
|
Коррекция псевдодальности (PRC) |
16 |
± 327,67 м |
0,01 м |
|
Коррекция скорости изменения дальности (RRC) |
16 |
± 32,767 м/с |
0,001 м/с |
|
spr_gnd |
8 |
0 - 5,08 м |
0,02 м |
|
B1 |
8 |
± 6,35 м |
0,05 м |
|
B2 |
8 |
± 6,35 м |
0,05 м |
|
B3 |
8 |
± 6,35 м |
0,05 м |
|
B4 |
8 |
± 6,35 м |
0,05 м |
|
spr_gnd - стандартное отклонение нормального распределения, связанное с вкладом сигнала в пространстве в погрешность псевдодальности, в опорной точке; B1 - B4 - параметры целостности, связанные с поправками к псевдодальности, содержащимися в том же самом блоке измерений. Для i-ro дальномерного источника эти параметры соответствуют ВL1 - BL4 |
|||
Таблица 4 - Формат сообщения типа 2 с данными по системе GBAS
|
Содержание данных |
Число разрядов |
Диапазон значений |
Разрешающая способность |
|
Опорные приемники GBAS |
2 |
2 - 4 |
- |
|
Показатель точности GBAS |
2 |
- |
- |
|
Не занято |
1 |
- |
- |
|
Показатель непрерывности/целостности GBAS |
3 |
0 - 7 |
1 |
|
Локальное магнитное склонение |
11 |
± 180° |
0,25° |
|
Не занято |
5 |
- |
- |
|
svert_iono_gradient |
8 |
0 - 25,5´10-6 м/м |
0,1´10-6 м/м |
|
Индекс рефракции |
8 |
16 - 781 |
3 |
|
Масштаб высоты |
8 |
0 - 25 500 м |
100 м |
|
Неоднозначность рефракции |
8 |
0 - 255 |
1 |
|
Широта |
32 |
± 90,0° |
0,0005" |
|
Долгота |
32 |
± 180,0° |
0,0005" |
|
Высота опорной точки |
24 |
± 83886,07 м |
0,01 м |
|
Дополнительный блок данных 1 (если обеспечивается) |
|||
|
Селектор данных опорной станции |
8 |
0 - 48 |
1 |
|
Максимальное используемое расстояние (Dmax) |
8 |
2 - 510 км |
2 км |
|
Kmd_e_POS, GPS |
8 |
0 - 12,75 |
0,05 |
|
Kmd_e_CAT1, GPS |
8 |
0 - 12,75 |
0,05 |
|
Kmd_e_POS, GLONASS |
8 |
0 - 12,75 |
0,05 |
|
Kmd_e_CAT1, GLONASS |
8 |
0 - 12,75 |
0,05 |
|
svert_iono_gradient - среднеквадратическое отклонение нормального распределения, соответствующее остаточной ионосферной неопределенности, обусловленной пространственной декорреляцией; Kmd_e_pos - множитель необнаружения передаваемых эфемерид для определения местоположения с использованием GBAS с учетом конфигурации спутников для j-ro дальномерного источника (Kmd_e_pos, GPS или Kmd_e_POS, GLONASS). |
|||
Таблица 5 - Формат сообщения типа 4 с данными FAS
|
Содержание данных |
Число разрядов |
Диапазон значений |
Разрешающая способность |
|
Для N наборов данных |
|||
|
Длина набора данных |
8 |
2 - 212 |
1 байт |
|
Блок данных FAS |
304 |
- |
- |
|
Порог срабатывания сигнализации по вертикали FAS/статус захода на посадку |
8 |
0 - 25,4 м |
0,1 м |
|
Порог срабатывания сигнализации по боку FAS/статус захода на посадку |
8 |
0 - 50,8 м |
0,2 м |
Таблица 6 - Формат сообщения типа 5 с прогнозом эксплуатационной готовности дальномерного источника
|
Число разрядов |
Диапазон значений |
Разрешающая способность |
|
|
Модифицированный Z-отсчет |
14 |
0 - 1199,9 с |
0,1 с |
|
Не занято |
2 |
- |
- |
|
Число задействованных источников (N) |
8 |
0 - 31 |
1 |
|
Для N задействованных источников |
|||
|
Идентификатор ID дальномерного источника |
8 |
1 - 255 |
1 |
|
Индикатор готовности источника |
1 |
- |
- |
|
Продолжительность эксплуатационной готовности источника |
7 |
0 - 1270 с |
10 с |
|
Число заходов на посадку в условиях ограниченной видимости (А) |
8 |
0 - 255 |
1 |
|
Для заходов на посадку в условиях ограниченной видимости |
|||
|
Селектор данных опорной траектории |
8 |
0 - 48 |
- |
|
Количество источников, задействованных для данного захода на посадку (NA) |
8 |
1 - 31 |
1 |
|
Для NA дальномерных источников, задействованных для данного захода на посадку |
|||
|
Идентификатор ID дальномерного источника |
8 |
1 - 255 |
1 |
|
Индикатор готовности источника |
1 |
- |
- |
|
Продолжительность эксплуатационной готовности источника |
7 |
0 - 1270 с |
10 с |
5.2. Передача корректирующей информации SBAS
5.2.1. SBAS обеспечивает дифференциальный режим в больших регионах и осуществляет передачу корректирующих дифференциальных поправок при помощи геостационарных спутников. Передаваемые системами SBAS сообщения позволяют корректировать обычные навигационные измерения, что дает возможность определить свои координаты потребителю с более высокой точностью. Помимо корректирующих поправок SBAS сообщения несут информацию о достоверности измерений и обеспечивают оперативное информирование о неисправностях навигационных спутников, то есть обеспечивается непрерывный контроль целостности системы.
5.2.2. Формат сообщений состоит из идентификатора типа сообщения, преамбулы, поля данных и символов контроля избыточным циклическим кодом, как показано на рисунке 1.
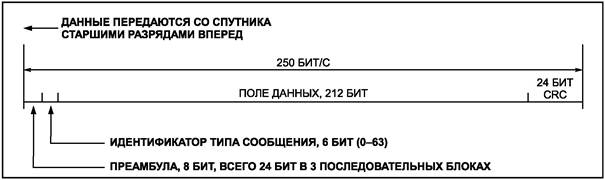
Рисунок 1 - Структура блока данных
Преамбула состоит из последовательности двоичных разрядов «01010011 10011010 11000110», распределенных на три последовательных блока. Начало каждой новой 24 - разрядной преамбулы синхронизируется с 6-секундной эпохой кадра GPS. Идентификатор типа сообщения представляет собой 6-разрядное значение, указывающее на тип сообщения (от 0 до 63), как показано в таблице 7. Идентификатор типа сообщения передается старшими разрядами вперед.
Таблица 7 - Типы передаваемых сообщений
|
Содержание |
|
|
0 |
«Не использовать» (режим проверки SBAS) |
|
1 |
Маска PRN |
|
2 - 5 |
Быстрые поправки |
|
6 |
Данные о целостности |
|
7 |
Фактор деградации быстрых поправок |
|
8 |
Не занято |
|
9 |
Параметры дальномерной функции спутника GEO |
|
10 |
Параметры деградации |
|
11 |
Не занято |
|
12 |
Параметры сдвига «сетевое время SBAS/UTC» |
|
13 - 16 |
Не занято |
|
17 |
Альманахи спутников GEO |
|
18 |
Точечно-сеточные маски ионосферы |
|
19 - 23 |
Не занято |
|
24 |
Смешанные быстрые/долгосрочные поправки к погрешностям спутников |
|
25 |
Долгосрочные поправки к погрешностям спутников |
|
26 |
Поправки к задержкам в ионосфере |
|
27 |
Служебное сообщение SBAS |
|
28 |
Матрица ковариации времени и эфемерид |
|
29 - 61 |
Не занято |
|
62 |
Зарезервировано |
|
63 |
Нулевое сообщение |
5.2.3. Поле данных состоит из 212 двоичных разрядов, как определено в таблице 8. Каждый параметр поля данных передается старшими разрядами вперед.
Таблица 8 - PRN-коды SBAS
|
Номер PRN кода |
Задержка G2 (символ) |
Первые 10 символов SBAS (в двоичном виде самый большой разряд слева представляет первый передаваемый символ) |
|
120 |
145 |
110111001 |
|
121 |
175 |
101010001 |
|
122 |
52 |
101001000 |
|
123 |
21 |
1101100101 |
|
124 |
237 |
1110000 |
|
125 |
235 |
111000001 |
|
126 |
886 |
1011 |
|
127 |
657 |
1000110000 |
|
128 |
634 |
10100101 |
|
129 |
762 |
101010111 |
|
130 |
355 |
1100011110 |
|
131 |
1012 |
1010010110 |
|
132 |
176 |
1010101111 |
|
133 |
603 |
100110 |
|
134 |
130 |
1000111001 |
|
135 |
359 |
101110001 |
|
136 |
595 |
1000011111 |
|
137 |
68 |
111111000 |
|
138 |
386 |
1011010111 |
5.2.4. Каждое сообщение SBAS кодируется в соответствии с установленным форматом сообщений, определенным в таблицах 9 - 29. Все описанные в таблицах 9 - 29 параметры содержат знаковый разряд, передаваемый в старшем разряде. Диапазон передаваемых параметров меньше приводимого в таблицах 9 - 29, так как максимальное положительное значение ограничивается значением, представленным в таблице 8, минус разрешающая способность.
Таблица 9 - Сообщение типа 0. «Не использовать»
|
Разряды |
Диапазон значений |
Разрешающая способность |
|
|
Не занято |
212 |
- |
- |
Таблица 10 - Сообщение типа 1. Маска PRN
|
Содержание |
Разряды |
Диапазон значений |
Разрешающая способность |
|
Для каждого из 210 номеров PRN-кода |
|||
|
Значение маски |
1 |
0 или 1 |
1 |
|
Признак набора данных (IODP) |
2 |
0 - 3 |
1 |
Таблица 11 - Сообщения типов 2 - 5. Быстрые поправки
|
Содержание |
Разряды |
Диапазон значений |
Разрешающая способность |
|
IODFj |
2 |
0 - 3 |
1 |
|
IODP |
2 |
0 - 3 |
1 |
|
Для 13 точек |
|||
|
Быстрая поправка (FCi) |
12 |
± 256,000 м |
0,125 м |
|
Для 13 точек |
|||
|
UDREi |
4 |
(см. таблицу 12) |
(см. таблицу 12) |
Таблица 12 - Оценка UDREIi
|
|
|
|
0 |
0,0520 м2 |
|
1 |
0,0924 м2 |
|
2 |
0,1444 м2 |
|
3 |
0,2830 м2 |
|
4 |
0,4678 м2 |
|
5 |
0,8315 м2 |
|
6 |
1,2992 м2 |
|
7 |
1,8709 м2 |
|
8 |
2,5465 м2 |
|
9 |
3,3260 м2 |
|
10 |
5,1968 м2 |
|
11 |
20,7870 м2 |
|
12 |
230,9661 м2 |
|
13 |
2078,6950 м2 |
|
14 |
Нет мониторинга |
|
15 |
Не использовать |
Дисперсия
модели остаточных ионосферных погрешностей - ![]() Дисперсия распределения,
обусловленного остаточными погрешностями ошибки ионосферы, если сигнал L1 проходит
ионосферу в точке IGP вертикально.
Дисперсия распределения,
обусловленного остаточными погрешностями ошибки ионосферы, если сигнал L1 проходит
ионосферу в точке IGP вертикально.
Таблица 13 - Сообщение типа 6. Целостность
|
Содержание |
Разряды |
Диапазон значений |
Разрешающая способность |
|
IODF2 |
2 |
0 - 3 |
1 |
|
IODF3 |
2 |
0 - 3 |
1 |
|
IODF4 |
2 |
0 - 3 |
1 |
|
IODF5 |
2 |
0 - 3 |
1 |
|
Для 51 спутника (определяется номером маски PRN) |
|||
Таблица 14 - Сообщение типа 7. Коэффициент деградации быстрых поправок
|
Содержание |
Разряды |
Диапазон значений |
Разрешающая способность |
|
Системное запаздывание (tlat) |
4 |
0 - 15 с |
1 с |
|
IODP |
2 |
0 - 3 |
1 |
|
Не занято |
2 |
- |
- |
|
Для 51 спутника (определяется номером маски PRN) |
|||
Таблица 15 - Сообщение типа 9. Дальномерная функция
|
Содержание |
Разряды |
Диапазон значений |
Разрешающая способность |
|
Не занято |
8 |
- |
- |
|
t0,GEO |
13 |
0 - 86384 с |
16 с |
|
XG |
30 |
± 42949673 м |
0,08 м |
|
YG |
30 |
± 42949673 м |
0,08 м |
|
ZG |
25 |
± 6710886,4 м |
0,4 м |
|
|
17 |
± 40,96 м/с |
0,000625 м/с |
|
|
17 |
± 40,96 м/с |
0,000625 м/с |
|
|
18 |
± 524,288 м/с |
0,004 м/с |
|
|
10 |
± 0,0064 м/с2 |
0,0000125 м/с2 |
|
|
10 |
± 0,0064 м/с2 |
0,0000125 м/с2 |
|
|
10 |
± 0,032 м/с2 |
0,0000625 м/с2 |
|
aGf0 |
12 |
± 0,9537´10-6 с |
2-31 с |
|
aGf1 |
8 |
± 1,1642´10-10 с/с |
2-40 с/с |
|
t0,GEO - время привязки данных для дальномерной функции GEO, выраженное как время от полуночи текущих суток; XG, YG, ZG - координаты GEO на момент t0,GEO; [ [ aGf0 - сдвиг бортовой шкалы времени GEO относительно SNT, определенный на момент t0,GEO. aGf1 - скорость дрейфа бортовой шкалы времени GEO относительно SNT. |
|||
Таблица 16 - Сообщение типа 10. Параметры деградации
|
Содержание |
Разряды |
Диапазон значений |
Разрешающая способность |
|
Brrc |
10 |
0 - 2,046 м |
0,002 м |
|
CItc_Isb |
10 |
0 - 2,046 м |
0,002 м |
|
CItc_v1 |
10 |
0 - 0,05115 м/с |
0,00005 м/с |
|
IItc_v1 |
9 |
0 - 511 с |
1 с |
|
CItc_v0 |
10 |
0 - 2,046 м |
0,002 м |
|
IItc_v0 |
9 |
0 - 511 м |
1 с |
|
Cgeo_Isb |
10 |
0 - 0,5115 м |
0,0005 м |
|
Cgeo_v |
10 |
0 - 0,05115 м/с |
0,00005 м/с |
|
Igeo |
9 |
0 - 511 с |
1 с |
|
Cer |
6 |
0 - 31,5 м |
0,5 м |
|
Ciono_step |
10 |
0 - 1,023 м |
0,001 м |
|
Iiono |
9 |
0 - 511 с |
1 с |
|
Ciono_ramp |
10 |
0 - 0,005115 м/с |
0,000005 м/с |
|
RSSUDRE |
1 |
0 или 1 |
1 |
|
RSSiono |
1 |
0 или 1 |
1 |
|
Ccovariance |
7 |
0 - 12,7 |
0,1 |
|
He занято |
81 |
- |
- |
|
Brrc - параметр, определяющий границы шума и погрешности округления при вычислении деградации поправки к скорости изменения дальности; Cltc_Isb - максимальная ошибка округления, определяемая разрешающей способностью передаваемых данных об орбите и времени; Cltc_v1 - диапазон скоростных ошибок при максимальном расхождении по скорости пропущенных сообщений из-за различия в скорости изменения параметров орбиты и времени; IItc_v1 - интервал обновления долгосрочных поправок, если код скорости равен 1; CItc_v0 - параметр, определяющий границы расхождения между двумя последовательными долгосрочными поправками для спутников с кодом скорости равен 0; IItc_v0 - минимальный интервал обновления для долгосрочных сообщений, если код скорости равен 0; Cgeo_Isb - максимальная ошибка округления, определяемая разрешающей способностью данных об орбите и времени; Сgео_v - диапазон скоростной ошибки при максимальном расхождении по скорости пропущенных сообщений из-за различия в скорости изменения данных об орбите и времени; Igeo - интервал обновления для дальномерных сообщений GEO; Сег - диапазон остаточной погрешности, связанный с использованием данных за пределами интервала времени для точного захода на посадку/захода на посадку с вертикальным наведением; Ciono_step - диапазон разностей между последовательными значениями задержек в ионосферной сетке; Iiono - минимальный интервал обновления для сообщений с ионосферными поправками; Ciono_ram - скорость изменения ионосферных поправок; RSSUDRE - признак квадратичного суммирования для разностей быстрых и долгосрочных поправок. Правило кодирования: 0 - разности поправок суммируются линейно; 1 - квадраты разностей поправок складываются под квадратным корнем; RSSiono - признак квадратичного суммирования для разностей ионосферных поправок. Правило кодирования: 0 - разности поправок суммируются линейно; 1 - квадраты разностей поправок складываются под квадратным корнем; Ccovariance: математический член, который используется для компенсации влияния квантования при применении сообщения типа 28. Если сообщение типа 28 не передается, параметр Ccovariance не применяется. |
|||
Таблица 17 - Сообщение типа 12. Сетевое время SBAS/UTC
|
Содержание |
Разряды |
Диапазон значений |
Разрешающая способность |
|
A1SNT |
24 |
± 7,45 ± 10-9 с/с |
2-50 с/с |
|
A0SNT |
32 |
± 1 с |
2-30 с |
|
t0t |
8 |
0 - 602112 с |
4096 с |
|
WNt |
8 |
0 - 255 нед |
1 нед |
|
DtLS |
8 |
± 128 с |
1 с |
|
WNLSF |
8 |
0 - 255 нед |
1 нед |
|
DN |
8 |
1 - 7 сут |
1 сут |
|
DtLSF |
8 |
± 128 с |
1 с |
|
Идентификатор стандарта UTC |
3 |
(см. таблицу 18) |
(см. таблицу 18) |
|
Время в неделе GPS (TOW) |
20 |
0 - 604799 с |
1 с |
|
Номер недели GPS (WN) |
10 |
0 - 1023 нед |
1 нед |
|
Индикатор ГЛОНАСС |
1 |
0 или 1 |
1 |
|
A0SNT, A1SNT, t0t, WNt, DN, DtLSF - данные для вычисления параметров UTC: A0SNT - сдвиг шкалы времени SBAS относительно UTC, определенный на момент t0t; A1SNT - скорость дрейфа шкалы времени SBAS относительно UTC; WNt - номер недели; DN - номер суток в неделе. |
|||
Таблица 18 - Идентификатор стандарта UTC
|
Идентификатор UTC |
Стандарт UTC |
|
0 |
Время UTC, находящееся в ведении Исследовательской лаборатории связи (Токио, Япония) |
|
1 |
Время UTC, находящееся в ведении Национального института стандартов и технологий США |
|
2 |
Время UTC, находящееся в ведении Военно-морской обсерватории США |
|
3 |
Время UTC, находящееся в ведении Международного бюро мер и весов |
|
4 |
Время UTC, находящееся в ведении Европейской лаборатории |
|
5 - 6 |
Не занято |
|
7 |
UTC не передается |
Таблица 19 - Сообщение типа 17. Альманах GEO
|
Содержание |
Разряды |
Диапазон значений |
Разрешающая способность |
|
Для каждого из трех спутников |
|||
|
Не занято |
2 |
- |
- |
|
Номер PRN-кода |
8 |
0 - 210 |
1 |
|
Исправность и состояние |
8 |
- |
- |
|
XG,a |
15 |
± 42598400 м |
2600 м |
|
YG,a |
15 |
± 42598400 м |
2600 м |
|
ZG,a |
9 |
± 6656000 м |
26000 м |
|
|
3 |
± 40 м/с |
10 м/с |
|
|
3 |
± 40 м/с |
10 м/с |
|
|
4 |
± 480 м/с |
60 м/с |
|
talmanac (применяется ко всем трем спутникам) |
11 |
0 - 86336 с |
64 с |
|
[Xg,a Yg,a Zg,a] координаты GEO на время talmanac; [ talmanac - время привязки данных альманаха GEO, выраженное как время от полуночи текущих суток. |
|||
Таблица 20 - Сообщение типа 18. Маска IGP
|
Содержание |
Разряды |
Диапазон значений |
Разрешающая способность |
|
Число диапазонов IGP |
4 |
0 - 11 |
1 |
|
Идентификатор диапазона IGP |
4 |
0 - 10 |
1 |
|
Признак набора данных об ионосфере (IODIk) |
2 |
0 - 3 |
1 |
|
Для 201 точки IGP |
|||
|
Значение маски IGP |
1 |
0 или 1 |
1 |
|
Не занято |
1 |
- |
- |
Таблица 21 - Сообщение типа 24. Смешанные быстрые поправки/долгосрочные поправки к погрешностям спутников
|
Содержание |
Разряды |
Диапазон значений |
Разрешающая способность |
|
Для шести точек |
|||
|
Быстрая поправка (FCi) |
12 |
± 256,000 м |
0,125 м |
|
Для шести точек |
|||
|
UDREIi |
4 |
(см. таблицу 22) |
(см. таблицу 22) |
|
IODP |
2 |
0 - 3 |
1 |
|
Идентификатор типа быстрой поправки |
2 |
0 - 3 |
1 |
|
IODFj |
2 |
0 - 3 |
1 |
|
Не занято |
4 |
- |
- |
|
Половинное сообщение типа 25 |
106 |
- |
- |
Таблица 22 - Время действия
|
Используемые биты |
Диапазон значений |
Разрешение |
|
|
Время действия (V) |
5 |
30 - 960 с |
30 с |
Таблица 23 - Сообщение типа 25. Долгосрочные поправки к погрешностям спутников (половинное сообщение для кода скорости, равного 0)
|
Содержание |
Разряды |
Диапазон значений |
Разрешающая способность |
|
Код скорости = 0 |
1 |
0 |
1 |
|
Для двух спутников |
|||
|
Номер маски PRN |
6 |
0 - 51 |
1 |
|
Признак набора данных (IODi) |
8 |
0 - 255 |
1 |
|
δxi |
9 |
± 32 м |
0,125 м |
|
δyi |
9 |
± 32 м |
0,125 м |
|
δzi |
9 |
± 32 м |
0,125 м |
|
δai,f0 |
10 |
± 2-22 с |
2-31 с |
|
IODP |
2 |
0 - 3 |
1 |
|
Не занято |
1 |
- |
- |
|
δхi - поправка к эфемеридам для i-спутника по оси х; δуi - поправка к эфемеридам для i-спутника по оси у; δzi - поправка к эфемеридам для i-спутника по оси z; δai,f0 - временная поправка для i-спутника. |
|||
Таблица 24 - Сообщение типа 25. Долгосрочные поправки к погрешностям спутников (половинное сообщение для кода скорости, равного 1)
|
Содержание |
Разряды |
Диапазон значений |
Разрешающая способность |
|
Для одного спутника |
|||
|
Код скорости = 1 |
1 |
1 |
1 |
|
Номер маски PRN |
6 |
0 - 51 |
1 |
|
Номер набора данных (IODi) |
8 |
0 - 255 |
1 |
|
δxi |
11 |
± 128 м |
0,125 м |
|
δyi |
11 |
± 128 м |
0,125 м |
|
δzi |
11 |
± 128 м |
0,125 м |
|
δai,f0 |
11 |
± 2-21 с |
2-31 с |
|
|
8 |
± 0,0625 м/с |
2-11 м/с |
|
|
8 |
± 0,0625 м/с |
2-11 м/с |
|
|
8 |
± 0,0625 м/с |
2-11 м/с |
|
δai,f1 |
8 |
± 2-32 с/с |
2-39 с/с |
|
Время привязки (ti,LT) |
13 |
0 - 86384 с |
16 с |
|
IODP |
2 |
0 - 3 |
1 |
|
δxi - поправка к эфемеридам (скорости) i-спутника по оси х; δyi - поправка к эфемеридам (скорости) для i-спутника по оси у; δzi - поправка к эфемеридам (скорости) для i-спутника по оси z; δai,f0 - частотная поправка для i-спутника; ti,LT - время привязки параметров δxi:, δyi:, δzi:, δai,f0, Правило кодирования: 0 -
поправки 1 - поправки |
|||
Таблица 25 - Сообщение типа 26. Ионосферная задержка
|
Содержание |
Разряды |
Диапазон значений |
Разрешающая способность |
|
Идентификатор диапазона IGP |
4 |
0 - 10 |
1 |
|
Идентификатор блока IGP |
4 |
0 - 13 |
1 |
|
Для каждой из 15 точек сетки |
|||
|
Оценка вертикальной задержки IGP |
9 |
0 - 63,875 м |
0,125 м |
|
Индикатор сеточной ионосферной вертикальной погрешности (GIVE) |
4 |
(см. таблицу 26) |
(см. таблицу 26) |
|
IODIk |
2 |
0 - 3 |
1 |
|
Не занято |
7 |
- |
- |
Таблица 26 - Оценка GIVEIi
|
|
|
|
0 |
0,0084 м2 |
|
1 |
0,0333 м2 |
|
2 |
0,0749 м2 |
|
3 |
0,1331 м2 |
|
4 |
0,2079 м2 |
|
5 |
0,2994 м2 |
|
6 |
0,4075 м2 |
|
7 |
0,5322 м2 |
|
8 |
0,6735 м2 |
|
9 |
0,8315 м2 |
|
10 |
1,1974 м2 |
|
11 |
1,8709 м2 |
|
12 |
3,3260 м2 |
|
13 |
20,7870 м2 |
|
14 |
187,0826 м2 |
|
15 |
Нет мониторинга |
Таблица 27 - Сообщение типа 27. Сервисное сообщение SBAS
|
Содержание |
Разряды |
Диапазон значений |
Разрешающая способность |
|
Признак данных обслуживания (IODS) |
3 |
0 - 7 |
1 |
|
Число сервисных сообщений |
3 |
1 - 8 |
1 |
|
Номер сервисного сообщения |
3 |
1 - 8 |
1 |
|
Количество регионов |
3 |
0 - 5 |
1 |
|
Код приоритета |
2 |
0 - 3 |
1 |
|
Внутренний показатель δ UDRE |
4 |
0 - 15 |
1 |
|
Внешний показатель δ UDRE |
4 |
0 - 15 |
1 |
|
Для каждого из пяти регионов |
|||
|
Координата 1 широта |
8 |
± 90° |
1° |
|
Координата 1 долгота |
9 |
±180° |
1° |
|
Координата 2 широта |
8 |
± 90° |
1° |
|
Координата 2 долгота |
9 |
± 180° |
1° |
|
Форма региона |
1 |
- |
- |
|
Не занято |
15 |
- |
- |
Таблица 28 - Сообщение типа 63. Нулевое сообщение
|
Содержание |
Разряды |
Диапазон значений |
Разрешающая способность |
|
Не занято |
212 |
- |
- |
Таблица 29 - Сообщение типа 28. Ковариационная матрица времени и эфемерид
|
Разряды |
Диапазон значений |
Разрешающая способность |
|
|
IODP |
2 |
0 - 3 |
1 |
|
Для двух спутников |
|||
|
Номер маски PRN |
6 |
0 - 51 |
1 |
|
Экспонента масштаба |
3 |
0 - 7 |
1 |
|
E1,1 |
9 |
0 - 511 |
1 |
|
Е2,2 |
9 |
0 - 511 |
1 |
|
Е3,3 |
9 |
0 - 511 |
1 |
|
Е4,4 |
9 |
0 - 511 |
1 |
|
E1,2 |
10 |
± 512 |
1 |
|
Е1,3 |
10 |
± 512 |
1 |
|
Е1,4 |
10 |
± 512 |
1 |
|
E2,3 |
10 |
± 512 |
1 |
|
Е2,4 |
10 |
± 512 |
1 |
|
Е3,4 |
10 |
± 512 |
1 |
|
Ключевые слова: ГНСС, ГЛОНАСС, корректирующая информация, наземная система функционального дополнения, поправки дифференциальные, технические требования, широкозонная система функционального дополнения |