|
ФЕДЕРАЛЬНОЕ
АГЕНТСТВО |
||
|
|
НАЦИОНАЛЬНЫЙ |
ГОСТ
Р ИСО |

Вибрация
МЕТОДЫ
КАЛИБРОВКИ ДАТЧИКОВ
ВИБРАЦИИ И УДАРА
Часть 1
Основные положения
ISO
16063-1:1998
Methods for the calibration of vibration
and shock transducers -
Part 1: Basic concepts
(IDT)
|
|
Москва
|
Предисловие
Цели и принципы стандартизации в Российской Федерации установлены Федеральным законом от 27 декабря 2002 г. № 184-ФЗ «О техническом регулировании», а правила применения национальных стандартов Российской Федерации - ГОСТ Р 1.0-2004 «Стандартизация в Российской Федерации. Основные положения»
Сведения о стандарте
1. ПОДГОТОВЛЕН Федеральным государственным унитарным предприятием Всероссийский научно-исследовательский институт метрологической службы (ФГУП ВНИИМС) на основе собственного аутентичного перевода на русский язык стандарта, указанного в пункте 4, с участием Автономной некоммерческой организации «Научно-исследовательский центр контроля и диагностики технических систем» (АНО «НИЦ КД»)
2. ВНЕСЕН Техническим комитетом по стандартизации ТК 183 «Вибрация, удар и контроль технического состояния»
3. УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Приказом Федерального агентства по техническому регулированию и метрологии от 15 декабря 2009 г. № 869-ст
4. Настоящий стандарт является идентичным по отношению к международному стандарту ИСО 16063-1:1998 «Методы калибровки датчиков вибрации и удара. Часть 1. Основные положения» (ISO 16063-1:1998 «Methods for the calibration of vibration and shock transducers - Part 1: Basic concepts»)
При применении настоящего стандарта рекомендуется использовать вместо ссылочных международных стандартов соответствующие им национальные и межгосударственные стандарты, сведения о которых приведены в дополнительном приложении ДА
5. ВВЕДЕН ВПЕРВЫЕ
Информация об изменениях к настоящему стандарту публикуется в ежегодно издаваемом указателе «Национальные стандарты», а текст изменений и поправок - в ежемесячно издаваемых информационных указателях «Национальные стандарты». В случае пересмотра (замены) или отмены настоящего стандарта соответствующее уведомление будет опубликовано в ежемесячно издаваемом информационном указателе «Национальные стандарты». Соответствующая информация, уведомление и тексты размещаются также в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет
СОДЕРЖАНИЕ
НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
|
Вибрация МЕТОДЫ КАЛИБРОВКИ ДАТЧИКОВ ВИБРАЦИИ И УДАРА Часть 1 Основные положения Vibration.
Methods for the calibration of vibration and shock transducers. |
Дата введения - 2011-01-01
1. Область применения
Настоящий стандарт устанавливает общие принципы калибровки преобразователей1) вибрации и удара и определения чувствительности их коэффициента преобразования к действию влияющих факторов.
___________
1) В настоящем стандарте вместо термина «датчик» используется более общий термин «преобразователь», что точнее соответствует используемому в оригинале международного стандарта термину «transducer».
Настоящий стандарт устанавливает классификацию методов калибровки на методы первичной калибровки и методы калибровки сравнением.
Настоящий стандарт распространяется на преобразователи ускорения, скорости и перемещения поступательного движения непрерывного действия.
2. Нормативные ссылки
В настоящем стандарте использованы нормативные ссылки на следующие стандарты:
ИСО 1101 Характеристики изделий геометрические. Допуски на геометрические параметры. Допуски на форму, ориентацию, расположение и биения (ISO 1101, Geometrical Product Specifications (GPS) - Geometrical tolerancing - Tolerances of form, orientation, location and run-out).
ИСО 2041 Вибрация, удар и контроль состояния. Словарь (ISO 2041, Mechanical vibration, shock and condition monitoring - Vocabulary)
ИСО 2954:1975 Вибрация машин с вращательным и возвратно-поступательным движением. Требования к средствам измерений вибрации для контроля вибрационного состояния машин (ISO 2954:1975, Mechanical vibration of rotating and reciprocating machinery - Requirements for instruments for measuring vibration severity)
Руководство ИСО/МЭК 98-3 Неопределенность измерений. Часть 3. Руководство по выражению неопределенности измерений [ISO/IEC Guide 98-3, Uncertainty of measurement - Part 3: Guide to the expression of uncertainty in measurement (GUM:1995)]
3. Термины и определения
В настоящем стандарте применены термины по ИСО 2041, а также следующие термины с соответствующими определениями:
3.1 преобразователь (transducer): Устройство для преобразования измеряемого механического движения, например, ускорения в заданном направлении, в величину, удобную для измерения или записи.
Примечание - Преобразователь может включать в себя дополнительные устройства, обеспечивающие усиление, необходимое питание с соответствующими элементами цепи, индикацию или запись выходного сигнала и др.
3.1.1 рабочий диапазон преобразователя (рабочий диапазон) (operating range): Диапазон частот и амплитуд, в котором преобразователь можно считать линейным в пределах установленных границ или допуска.
3.1.2 обратимый преобразователь (reciprocating transducer): Двусторонний электромеханический преобразователь, у которого отношение приложенного тока к возникающей силе (при скорости движения преобразователя, равной нулю) равно отношению приданной скорости к возникающему напряжению (при разомкнутой выходной цепи преобразователя).
Примеры - Электромагнитный датчик, пьезоэлектрический датчик.
3.1.3 односторонний преобразователь (unilateral transducer): Преобразователь, использующий тензочувствительные элементы, электрическое возбуждение которых не вызывает заметного механического эффекта в преобразователе.
3.2 входной сигнал преобразователя (input signal): Сигнал, подаваемый на вход преобразователя.
Пример - Ускорение, приданное монтажной поверхности преобразователя.
3.3 выходной сигнал преобразователя (output signal): Сигнал, генерируемый преобразователем как отклик на входной сигнал.
Примечание 1 - Для преобразователей с одной монтажной поверхностью вектор входного ускорения считают положительным, если он направлен в монтажную поверхность преобразователя. Для эталонного преобразователя, используемого для калибровки сравнением методом «спина к спине», вектор ускорения считают положительным, если он направлен из верхней монтажной поверхности эталонного акселерометра в калибруемый акселерометр.
Примечание 2 - Фазу выходного сигнала (напряжения, заряда, тока, сопротивления и др.) определяют по отношению к установленному положительному вектору ускорения или его производных (скорости или перемещения).
3.4 коэффициент преобразования линейного преобразователя (коэффициент преобразования) (sensitivity): Отношение выходного сигнала к входному при гармоническом воздействии, приложенном к монтажной поверхности преобразователя параллельно соответствующей оси чувствительности.
Примечание 1 - В общем случае коэффициент преобразования включает в себя информацию об амплитуде и фазе и, соответственно, является комплексной величиной, зависящей от частоты. Для гармонического воздействия справедливы следующие формулы:
![]() (1)
(1)
![]() (2)
(2)
![]() (3)
(3)
![]() (4)
(4)
где s - комплексное перемещение;
v - комплексная скорость;
a - комплексное ускорение;
u - комплексная величина выходного сигнала;
ŝ - амплитуда сигнала перемещения;
![]() - амплитуда сигнала скорости;
- амплитуда сигнала скорости;
â - амплитуда сигнала ускорения;
û - амплитуда выходного сигнала;
φ1, φ2 - фазовые углы;
ω - угловая частота;
t - время;
j - мнимая единица.
Коэффициент преобразования по перемещению Ss в единицах выходного сигнала на метр определяют по формуле
![]() (5)
(5)
где ![]() - модуль коэффициента
преобразования по перемещению;
- модуль коэффициента
преобразования по перемещению;
(φ1 - j2) - сдвиг фаз.
Коэффициент преобразования по скорости Sv единицах выходного сигнала на метр в секунду (м/с) определяют по формуле
![]() (6)
(6)
где ![]() - модуль коэффициента
преобразования по скорости;
- модуль коэффициента
преобразования по скорости;
(φ1 + π/2 - φ2) - сдвиг фаз.
Коэффициент преобразования по ускорению Sa в единицах выходного сигнала на метр на секунду в квадрате (м/с2) определяют по формуле
![]() (7)
(7)
где ![]() - модуль коэффициента
преобразования по ускорению;
- модуль коэффициента
преобразования по ускорению;
(φ1 + π - φ2)- сдвиг фаз.
Обычно коэффициент преобразования
по перемещению определяют для преобразователей перемещения, по скорости - для
преобразователей скорости, по ускорению - для преобразователей ускорения. В
общем случае модули и фазовые углы коэффициента преобразования являются
функциями частоты ![]() .
.
Примечание 2 - Преобразователи перемещения, скорости и ускорения, у которых коэффициент преобразования на нулевой частоте не равен нулю, называют преобразователями с откликом на нулевой частоте (откликом по постоянному току). Сдвиг фаз коэффициента преобразования на нулевой частоте равен нулю. Примерами преобразователей с откликом на нулевой частоте являются преобразователи ускорения, использующие в качестве чувствительных элементов тензорезисторы, потенциометры, дифференциальные трансформаторы, маятниковые акселерометры компенсационного типа, индукционные акселерометры. Преобразователи инерционного типа (пьезоэлектрические, электродинамические) являются примером преобразователей, не имеющих отклика на нулевой частоте.
3.5 относительный коэффициент поперечного преобразования (transverse sensitivity ratio): Отношение выходного сигнала преобразователя, ориентированного основной осью чувствительности перпендикулярно к направлению входного сигнала, к выходному сигналу этого же преобразователя, основная ось чувствительности совпадает с направлением входного сигнала.
3.6 вибростенд (vibration generator): Устройство для создания и передачи контролируемого движения монтажной поверхности преобразователя.
4. Измеряемые характеристики
4.1. Общие положения
Основной целью калибровки преобразователя является определение его коэффициента преобразования в рабочем диапазоне частот и амплитуд в направлении, соответствующем назначению преобразователя. Также может представлять интерес информация о коэффициенте преобразования для движений по остальным пяти степеням свободы. Например, для преобразователей, измеряющих поступательную вибрацию, может потребоваться знание коэффициента преобразования для вибрации в поперечном направлении и для угловой вибрации. Другими важными характеристиками являются демпфирование, сдвиг фаз, нелинейность (изменение отклика при изменении амплитуды входного воздействия), чувствительность к изменениям температуры, давления и к другим внешним условиям, например к движению соединительного кабеля.
4.2. Прямой отклик
4.2.1. Амплитудно-частотная и фазочастотная характеристики
Коэффициент преобразования определяют измерением параметров движения, создаваемого вибростендом, и выходного сигнала преобразователя. При этом преобразователь устанавливают таким образом, чтобы его основная ось чувствительности была параллельна направлению движения, создаваемого вибростендом. Для калибровки может быть использовано возбуждение в виде переходного процесса при условии, что его частотные составляющие находятся в пределах рабочего диапазона преобразователя.
Для выявления резонансов преобразователя необходимо наблюдать за его выходным сигналом в процессе медленного непрерывного изменения частоты вибрации, возбуждаемой вибростендом, во всем частотном диапазоне преобразователя.
Обычно интерес, в первую очередь, представляет зависимость от частоты модуля коэффициента преобразования (амплитудно-частотная характеристика). Однако при измерениях вибрации вблизи границ частотного диапазона преобразователя, а также при измерении с целью оценки параметров вибрации некоторых видов необходимо знать фазочастотную характеристику преобразователя. Фазочастотную характеристику определяют, измеряя сдвиг фаз между входным и выходным сигналами преобразователя в интересующем диапазоне частот.
4.2.2. Нелинейность
Отклонения от прямо пропорциональной зависимости между входным и выходным сигналами преобразователя, искажающие форму сигнала, определяют, измеряя амплитуды выходного сигнала при изменении входного сигнала в рабочем диапазоне амплитуд от минимального до максимального значения. При использовании вибростенда, возбуждающего гармонические колебания, измерения проводят на нескольких частотах.
Возможны разные виды нелинейности. Коэффициент преобразования может изменяться постепенно с увеличением амплитуды, может иметь постоянное смещение, ведущее к смещению нуля после воздействия на преобразователь вибрации или удара, а также может иметь область насыщения, резко обрывающую диапазон измерений вибрации.
Нелинейность может быть охарактеризована значением коэффициента гармоник, а также посредством сравнения резонансной кривой, фазового сдвига и декремента колебаний с аналогичными характеристиками идеального линейного преобразователя. Допустимые отклонения от линейности зависят от вида проводимых измерений. Эти отклонения определяют вблизи верхнего предела динамического диапазона преобразователя.
4.3. Влияющие факторы
4.3.1. Зависимость от температуры
У многих преобразователей коэффициент преобразования, коэффициент демпфирования и резонансная частота находятся в функциональной зависимости от температуры. При определении температурной зависимости чаще всего используют метод сравнения.
Испытуемый преобразователь устанавливают в термокамере соосно с эталонным, который защищают от изменений температуры, располагая его вне термокамеры или другим способом. Изменение коэффициента преобразования эталонного преобразователя не должно превышать 2 % в течение всей процедуры калибровки. Испытания проводят на частотах, где коэффициент поперечных составляющих вибрации, возбуждаемой вибростендом, не превышает 25 %. Конструкция вибростенда и устройства крепления преобразователя на частотах калибровки должна обеспечивать незначительное относительное движение эталонного и калибруемого преобразователей.
Альтернативным является метод, при котором эталонный и калибруемый преобразователь устанавливают внутри термокамеры. Этот метод ограничен диапазоном температур, в котором известны температурные свойства эталонного преобразователя.
Для преобразователей с откликом на нулевой частоте значения этого отклика измеряют при максимальной и минимальной температурах.
Преобразователи с внутренним демпфированием свыше 10 % калибруют, как минимум, на четырех частотах при одном значении амплитуды вибрации и при пяти значениях температуры, включая комнатную. Такие же условия испытаний применяют для преобразователей (например, электродинамических), конструкция которых включает в себя катушки индуктивности. Частоты возбуждения выбирают в пределах рабочего диапазона частот преобразователя.
Внутренние емкость и сопротивление пьезоэлектрических преобразователей необходимо измерять после стабилизации при максимальной температуре калибровки.
Если внутреннее сопротивление преобразователя при максимальной температуре калибровки окажется настолько малым, что будет влиять на низкочастотную область характеристики применяемого усилителя, то калибровку в низкочастотной области необходимо проводить при данной температуре. Чтобы определить частотную характеристику во всем рабочем диапазоне частот преобразователя, испытания проводят на нескольких частотах. Преобразователь калибруют вместе с усилителем, который будет использован с данным преобразователем.
Примечание - Высокая температура может повлиять как на частотную характеристику в низкочастотной области, так и на помехоустойчивость и стабильность системы «преобразователь - усилитель». Температурное отклонение отклика рассчитывают как изменение коэффициента преобразования при температуре испытания по отношению к коэффициенту преобразования при комнатной температуре (20 °C), измеренным на частоте в пределах диапазона частот, в котором коэффициент преобразования постоянен. Это отклонение выражают в процентах коэффициента преобразования при комнатной температуре. Как правило, желательно выбирать преобразователи, которые имеют температурное отклонение отклика, не превышающее 15 % в переделах установленного диапазона температур.
4.3.2. Чувствительность пьезоэлектрических преобразователей к перепаду температур
Пьезоэлектрические преобразователи под действием перепада температур генерируют пироэлектрический сигнал. Это особенно характерно для преобразователей, в конструкции которых использована ферроэлектрическая керамика. Значения пироэлектрических сигналов на выходе зависят от материала кристалла и конструкции преобразователя. Обычно доминирующая частота пироэлектрического выходного сигнала значительно меньше 1 Гц. Кроме того, пироэлектрические сигналы преобразователя отфильтровываются большинством усилителей, имеющих спад характеристики в низкочастотной области.
Таким образом, пироэлектрический выходной сигнал зависит от скорости изменения температуры и от характеристик усилителя и преобразователя, используемых совместно.
Пироэлектрические испытания проводят, используя тип усилителя, с которым обычно применяют данный преобразователь. Преобразователь обычным способом устанавливают на алюминиевый брусок, после чего их быстро погружают в ванну с ледяной водой или другой подходящей жидкостью, температура которой отличается от нормальной приблизительно на 20 °C. В протоколе испытаний должно быть указано, какую жидкость использовали при испытании. Масса бруска должна быть приблизительно в 10 раз больше массы преобразователя. Перед испытанием необходимо убедиться в том, что жидкость не будет проникать в преобразователь и не вызовет понижение сопротивления электрической изоляции при соприкосновении с разъемом преобразователя. Измеряют максимальное значение выходного сигнала усилителя и время от начала погружения до момента достижения этого значения. Если выходной сигнал в течение первых двух секунд изменит полярность и достигнет максимума противоположной полярности, то значение и время достижения этого максимума тоже должны быть зарегистрированы.
Для преобразователей ускорения чувствительность к перепаду температур выражают в метрах на секунду в квадрате на градус Цельсия (м/с2/°C) и определяют как частное от деления максимального выходного сигнала преобразователя на произведение разности между температурой жидкости в ванне и нормальной температурой на коэффициент преобразования акселерометра.
В случаях применения усилителей с ненулевыми значениями частотной характеристики в низкочастотной области пироэлектрические испытания следует проводить с использованием таких усилителей. Если в реальных условиях применения преобразователя скорость изменения температуры будет существенно отличаться от вышеописанной, то условия испытаний могут быть изменены, чтобы максимально приблизить их к реальным условиям.
4.3.3. Относительный коэффициент поперечного преобразования
Относительный коэффициент поперечного преобразования обычно определяют на одной частоте ниже 500 Гц. Частота калибровки должна быть указана в протоколе испытаний. Частоту калибровки гармоническим сигналом выбирают так, чтобы создаваемое движение в направлении, перпендикулярном основной оси чувствительности преобразователя, было, как минимум, в сто раз больше, чем в направлении основной оси чувствительности. Если относительный коэффициент поперечного преобразования менее 1 %, то требования к соотношению воспроизводимой вибрации в двух указанных направлениях ужесточаются. Поэтому проведение испытаний данного вида предъявляет повышенные требования к квалификации испытателя.
Преобразователь устанавливают на специальном приспособлении, позволяющим поворачивать его вокруг оси чувствительности на 360° с шагом 45° или менее, с целью определить направление максимального отклика на движение в поперечном направлении.
Примечание - Экспериментальные исследования коэффициента поперечного преобразования, проведенные для преобразователей разных моделей, свидетельствуют об отсутствии его зависимости от частоты на частотах до 2000 Гц. Накопленная к настоящему времени информация о поведении коэффициента поперечного преобразования в диапазоне частот от 2000 до 10000 Гц неполна. Некоторыми исследованиями установлено, что в диапазоне от 2000 до 10000 Гц отклик на поперечную вибрацию остается примерно таким же, как и на низких частотах (до 500 Гц). Обычно считают, что у преобразователей, имеющих резонансную частоту в направлении оси чувствительности свыше 30 кГц, частота резонанса в поперечном направлении будет более 10 кГц, т.е. находится за пределами рабочего диапазона. Информация, собранная в отношении преобразователей с другими характеристиками, не позволяет сделать определенных заключений. По возможности, рекомендуется определить низшую частоту резонанса преобразователя для движения в поперечном направлении.
4.3.4. Чувствительность к угловой вибрации
Некоторые преобразователи поступательной вибрации восприимчивы к угловой вибрации. Примерами являются пьезоэлектрические и пьезорезистивные маятниковые компенсационные акселерометры с изгибным чувствительным элементом. Необходимо принимать специальные меры, позволяющие предотвратить появление дополнительной погрешности измерений вследствие возможной угловой вибрации. Калибровка для определения чувствительности к угловой вибрации требует применения специальных методов, не рассматриваемых в настоящем стандарте (см., например, [34]).
4.3.5. Чувствительность к деформации основания преобразователя
В настоящем пункте описан предпочтительный метод определения влияния на выходной сигнал преобразователя изгиба его основания.
Преобразователь устанавливают на простой стальной консольной балке, которая воспроизводит радиус кривизны 25 м и относительную деформацию 250 · 10-6.
Балку защемляют в жесткой опоре. Балка имеет следующие размеры: ширина - 76 мм, толщина - 12,5 мм, длина незащемленной части - 1450 мм.
Частота собственных колебаний балки близка к 5 Гц. Деформацию измеряют тензометрами, закрепленными на балке около места крепления испытуемого преобразователя, расположенного на расстоянии 40 мм от места защемления конца балки. Колебания в месте крепления испытуемого преобразователя измеряют с помощью контрольного преобразователя, закрепленного с использованием слоя изоляции, позволяющего предотвратить прогиб его основания. При этом коэффициент преобразования контрольного преобразователя должен не менее чем в 10 раз превышать коэффициент преобразования испытуемого преобразователя. Выходные сигналы от тензометров и испытуемого преобразователя регистрируют.
Колебания возбуждают вручную, отклоняя свободный конец балки. Выходной сигнал испытуемого преобразователя регистрируют в момент, когда относительная деформация поверхности балки равна 250 · 10-6. Это соответствует радиусу кривизны балки 25 м. Погрешность, обусловленная деформацией основания преобразователя, равна разности между движением балки в месте крепления испытуемого преобразователя и движением, измеренным с помощью преобразователя. Чувствительность к деформации основания, приведенную к опорному значению 1 · 10-6, получают делением полученной погрешности на 250.
Чувствительность к деформации основания определяют при различных амплитудах деформации и различных направлениях деформации. Высокая чувствительность к деформации основания может привести к существенным погрешностям измерений при определенных условиях применения и способах крепления. Например, наблюдаемые на некоторых частотах возбуждения деформации стола вибростенда, применяемого при калибровке, вызывают погрешность определения коэффициента преобразования в несколько процентов.
4.3.6. Чувствительность к магнитному полю
Для определения чувствительности к магнитному полю преобразователь помещают в известное переменное магнитное поле (с частотой 50 или 60 Гц) и в этом поле поворачивают, регистрируя максимальный выходной сигнал. Этот сигнал характеризует чувствительность преобразователя к магнитному полю. Для преобразователей ускорения чувствительность к магнитному полю выражают в метрах на секунду в квадрате на тесла (м/с2/Тл); для преобразователей скорости - в метрах на секунду на тесла м/с/Тл. При проведении испытаний необходимо принять меры по предотвращению вибрации поверхности, на которую устанавливают преобразователь, и исключению электрических шумов.
4.3.7. Чувствительность к моменту затяжки
Влияние на коэффициент преобразования момента затяжки преобразователя определяют, выполняя затяжку преобразователя с разными моментами: половиной номинального, номинальным, удвоенным номинальным. Такому испытанию подвергают только преобразователи, устанавливаемые с помощью винтов, болтов или других резьбовых соединений. Если крепление осуществляют с помощью более одного крепежного элемента, то соответствующие моменты затяжки должны быть приложены к каждому из них.
Перед проведением испытания необходимо убедиться в том, что монтажная поверхность преобразователя не имеет заусенцев или других дефектов, которые могут препятствовать плотной установке преобразователя. Поверхность, на которую устанавливают преобразователь, также должна быть плоской, гладкой, выполненной из стали. Рекомендуются следующие значения неплоскостности и шероховатости поверхности: неплоскостность - менее 5 мкм; среднеквадратичное значение шероховатости - не более 2 мкм.
Для установки преобразователя монтажная поверхность должна иметь отверстия, перпендикулярные к установочной поверхности. Отклонение от перпендикулярности должно составлять не более 0,05 мм по ИСО 1011. Обычно на установочную поверхность и монтажную поверхность преобразователя рекомендуется предварительно нанести слой смазки. Момент затяжки последовательно увеличивают от минимального к максимальному.
Чувствительность к моменту затяжки определяют как изменение коэффициента преобразования при половинном и при удвоенном значении момента затяжки относительно коэффициента преобразования при номинальном моменте затяжки. Неопределенность измерений прикладываемого момента затяжки не должна превышать 15 %.
4.3.8. Другие влияющие факторы
На работу преобразователей некоторых типов могут влиять сильные электростатические, переменные магнитные и радиочастотные поля, акустические поля, кабельные эффекты и радиация и другие внешние факторы.
В настоящее время не существует общепринятых методов испытаний для оценки влияния таких факторов на коэффициент преобразования преобразователя, но в случаях, когда такое влияние может быть значительно, предусматривают проведение соответствующих испытаний (см. ИСО 2954).
5. Методы калибровки
5.1. Общие положения
Для выполнения калибровки преобразователя необходим вибростенд, создающий на входе преобразователя регулируемый и измеряемый сигнал, и средства регистрации или измерения выходного сигнала преобразователя. Преобразователь должен быть установлен на вибростенде или рядом с ним (если преобразователь предназначен для измерения вибрации объекта относительно этого преобразователя).
Крепление преобразователя должно быть достаточно жестким, чтобы обеспечить передачу без искажений движения вибростенда во всем частотном диапазоне преобразователя. Это означает, что собственная частота системы с одной степенью свободы, включающей в себя преобразователь, рассматриваемый как масса, и его крепление, рассматриваемое как пружина, должна быть выше самой высокочастотной составляющей вибрации, создаваемой вибростендом.
Обычно для калибровки используют вибростенд электродинамического типа. В качестве вибростенда может быть использована также поворотная опора, изменяющая положение преобразователя относительно направления силы тяжести, центрифуга, наковальня баллистического маятника и др. Поворотную опору и центрифугу используют для калибровки на нулевой частоте. Ротационную калибровку в гравитационном поле Земли применяют для низкочастотных преобразователей. Электродинамический вибростенд обычно используют для создания стационарного гармонического возбуждения. Баллистический маятник создает возбуждение в виде кратковременных переходных процессов и может быть использован в дополнение к электродинамическому вибростенду для определения собственной частоты преобразователя, а также для создания возбуждений с высокими ускорением и скоростью. Кроме того, ударное воздействие может быть использовано для проверки способности преобразователя выдерживать большие скачки скорости и ускорения, а также для проверки способности вспомогательных устройств, соединенных с преобразователем, нормально функционировать при переходных процессах.
В настоящем стандарте описаны методы калибровки, которые могут быть использованы в конкретных ситуациях. Однако в качестве первичной калибровки (в том числе, для получения коэффициента преобразования эталонных преобразователей) рекомендуется метод с применением лазерного интерферометра. Если калибровку проводят только на одной частоте, то эту частоту рекомендуется выбирать из ряда 160, 80, 16 или 8 Гц в зависимости от назначения преобразователя. Для получения коэффициента преобразования во всем рабочем диапазоне частот калибровку проводят на дискретных частотах в пределах этого диапазона. Возможно определение относительного коэффициента преобразования на разных частотах по сравнению с его значением на опорной частоте калибровки, однако данный способ определения частотной характеристики обеспечивает меньшую точность. В большинстве других практических случаев достаточно выполнения калибровки сравнением с эталонным преобразователем, откалиброванным первичным методом. При проведении калибровки выходной сигнал испытуемого преобразователя всегда сравнивают с движением поверхности, на которой закреплено его основание.
5.2. Методы первичной калибровки
5.2.1. Измерения амплитуды перемещения и частоты
5.2.1.1. Общие положения
Многие методы калибровки в динамическом режиме зависят от точности измерения амплитуды вибрации, которой подвергают преобразователь. Гармоническое возбуждение, создаваемое вибростендом, должно быть поступательным и точно направленным, поперечные колебания должны быть пренебрежимо малы.
Измеренное перемещение может быть использовано для расчета скорости v, м/с, и ускорения a, м/с2, по формулам v = 2pfs и a = (2pf)2s, что соответствует процедурам простого дифференцирования гармонического перемещения s на частоте f. Применяя данные формулы, предполагают, что высшие гармоники и шумовые составляющие вибрации остаются незначительными даже после дифференцирования. Следовательно, необходимо минимизировать искажения, обусловленные электрическими источниками энергии или другими причинами, например механическим резонансом. Высшие гармоники нежелательны также потому, что они могут возбуждать резонансы в преобразователе.
Если амплитуда перемещения известна, то коэффициент преобразования на данной частоте может быть рассчитан как отношение амплитуды измеренного выходного сигнала преобразователя к амплитуде скорости или ускорения. Амплитуда перемещения должна быть измерена методом лазерной интерферометрии (см. [21] - [26], [35] и [36]).
Измерение амплитуды перемещения методом лазерной интерферометрии обычно обеспечивает высокую точность в диапазоне от 0,1 Гц до 10 кГц (это соответствует амплитуде перемещения от 0,5 м до 20 нм). Специальные методы, основанные на интерференционных измерениях перемещения, позволяют, помимо модуля коэффициента преобразования, определять также фазовый сдвиг. Альтернативой методу лазерной интерферометрии, также обеспечивающей высокую точность измерений, как амплитуды, так и фазы перемещения, является метод с использованием лазерного доплеровского велосиметра [37]. Значительные погрешности измерений перемещения будут в случае, когда опорное зеркало интерферометра колеблется с частотой (или на высшей гармонике) возбуждения преобразователя. Погрешность может возникать также из-за колебаний разделителя луча. Данные колебания рекомендуется контролировать, используя для этого акселерометр с высоким значением коэффициента преобразования.
5.2.1.2. Теория идеального интерферометра
Принцип работы идеального интерферометра показан на рисунке 1, где Е0, E1, Е2 - векторы электрического поля, l1, l2 - расстояния, которые проходят лучи после разделителя; s - измеряемое перемещение (зеркало 2).
Векторы электрического поля Е1 и Е2 могут быть определены формулами:
![]()
![]()
где λ - длина волны лазерного излучения.
Интенсивность сигнала фотодетектора I(t) может быть определена по формуле
![]()
где А, В - постоянные параметры системы;
L = l2 - l1.
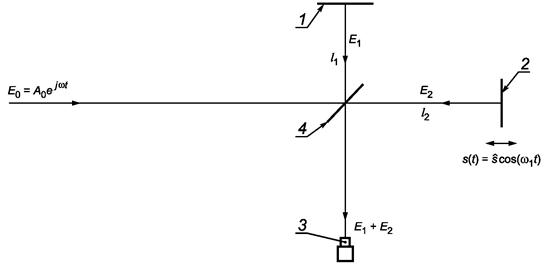
1 - зеркало 1; 2 - зеркало 2; 3 - фотодетектор; 4 - разделитель луча
Рисунок 1 - Принципиальная схема идеального интерферометра
Из формулы для интенсивности сигнала фотодетектора следует, что максимум сигнала имеет место при выполнении условия
![]()
Следовательно, перемещение, соответствующее расстоянию между двумя соседними максимумами интенсивности, равно Ds = λ/2.
Число максимумов Rf за период сигнала вибрации определяют по формуле
![]()
и обычно трактуют как «отношение частот», так как оно может быть определено делением числа интерференционных полос, подсчитанных за 1 с, на частоту вибрации.
Амплитуду перемещения ŝ рассчитывают по формуле
ŝ = Rfλ/8.
Если при этом измеряют также частоту вибрации, то можно рассчитать амплитуды скорости и ускорения.
Существуют вариации данного метода, основанные на измерении частотного спектра интенсивности I(t). Разложение I(t) (см. [21]) может быть представлено формулой

Следующие два примера иллюстрируют применяемые в данном случае способы обработки сигнала.
а) Значение ŝ
получают, регулируя амплитуду вибрации до уровня, при котором n-я гармоника равна
нулю, и решая уравнение ![]() .
.
b) В случае,
когда невозможно или практически нецелесообразно проводить измерения на уровнях
вибрации, при которых выполняется соотношение ![]() , значение амплитуды
перемещения ŝ можно получить из отношения двух гармоник, например,
решая относительно ŝ уравнение
, значение амплитуды
перемещения ŝ можно получить из отношения двух гармоник, например,
решая относительно ŝ уравнение
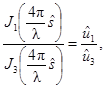
где û1, û3 - измеренные амплитуды первой и третьей гармоник соответственно.
5.2.1.3. Измерительная система
Пример измерительной системы показан на рисунке 2. Коэффициент преобразования испытуемого преобразователя должен быть определен сопоставлением измеренной вибрации с вибрацией его монтажной поверхности. Лазер имеет выходную мощность 1 мВт, детектором является обычный кремниевый фототранзистор. Вместо встроенного кристаллического осциллятора используют генератор импульсов с целью получения импульсов заданной формы, облегчающих работу счетчика отношения. Для выделения необходимой частоты при использовании нулевого метода применяют анализатор. Лазер и другие элементы интерферометрической системы, а также вибростенд должны быть установлены независимо на тяжелых виброизолирующих блоках (массой более 400 кг каждый) для исключения колебаний опорного зеркала или разделителя луча интерферометра, вызванных реакцией опорной конструкции вибростенда.
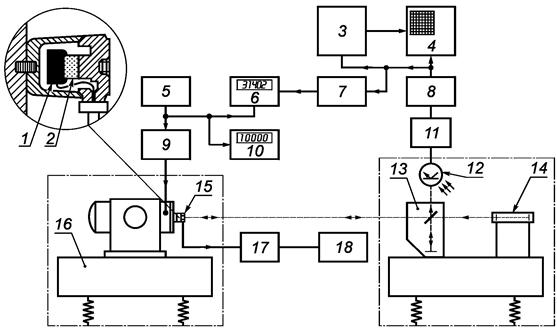
1 - сейсмическая масса; 2 - пьезоэлемент; 3 - частотный анализатор; 4 - осциллограф; 5 - генератор частоты; 6 - измеритель отношения частот; 7 - генератор импульсов; 8 - усилитель; 9 - усилитель мощности; 10 - частотомер; 11 - предусилитель; 12 - фототранзистор; 13 - интерферометр; 14 - гелий-неоновый лазер, λ = 632,8 нм; 15 - полированная монтажная поверхность преобразователя; 16 - вибростенд; 17 - предусилитель; 18 - вольтметр
Рисунок 2 - Пример измерительной системы с использованием лазерного интерферометра
5.2.2. Калибровка методом взаимности
Первичная калибровка преобразователей может быть осуществлена также методом взаимности (см. [26] - [28]). Принцип взаимности применим при калибровке вибрационных эталонных преобразователей в диапазоне амплитуд, где выходной электрический сигнал прямо пропорционален вибрации, создаваемой вибростендом. Принцип взаимности для катушки возбуждения вибростенда состоит в том, что отношение силы, действующей на подвижный элемент вибростенда, к создаваемой при этом разности потенциалов в разомкнутой цепи катушки возбуждения вибростенда равно отношению силы тока в катушке возбуждения к скорости производимых подвижным элементом вибростенда колебаний.
При возбуждении вибростенда переменным током определенной частоты, проходящим по катушке возбуждения, коэффициент преобразования Suc может быть определен как отношение разности потенциалов u13, В, на выходе преобразователя к ускорению â, м/с2, на монтажной поверхности преобразователя, т.е.
Цель калибровки методом взаимности - определение коэффициента преобразования Suc с тем, чтобы по результатам измерения разности потенциалов u13 можно было рассчитать ускорение â по формуле (8). Suc рассчитывают по формуле
Suc = S0 + sz · Zm, (9)
где Zm - входной механический импеданс преобразователя, кг/с.
Значения величин S0 и sz определяют по результатам двух экспериментов и последующего расчета.
Эксперимент 1
На подвижный элемент вибростенда последовательно устанавливают несколько грузов. Определяют передаточную полную проводимость Ye, а/В, между силой тока i, а, в катушке возбуждения и разностью потенциалов на выходе акселерометра u13, В, при возбуждении каждого груза, а также при работе вибростенда без груза по формуле
![]() (10)
(10)
Эксперимент 2
Подвижный элемент вибростенда с разомкнутой катушкой возбуждения принуждают совершать гармонические колебания с помощью вспомогательного вибровозбудителя1). Измеряют отношение u13/u15 разности потенциалов на выходе преобразователя (u13) к разности потенциалов в разомкнутой катушке возбуждения вибростенда (u15).
___________
1) Конструкция некоторых электродинамических вибростендов предполагает наличие двух катушек возбуждения, имеющих механическое соединение с корпусом вибростенда и его столом. В этом случае в использовании вспомогательного вибровозбудителя нет необходимости.
Расчет
Строят графики зависимости действительной и мнимой частей функции W/(YeW - Ye0) от массы груза W, устанавливаемого на подвижный элемент вибростенда, где YeW - значение передаточной полной проводимости Ye при установленном грузе W, а Yе0 - значение той же величины, полученное без груза. На каждом графике определяют точки пересечения функции с осью ординат, образующие, соответственно, действительную и мнимую части комплексной величины J. Значения параметров S0 и sz, используемых в формуле (9), рассчитывают по формулам:
![]() (11)
(11)
![]() (12)
(12)
где ω - угловая частота, рад/с;
j - мнимая единица.
5.2.3. Калибровка на центрифуге
Центрифуга представляет собой уравновешенный стол или рычаг, который может вращаться вокруг вертикальной оси с постоянной угловой скоростью. С помощью центрифуги на преобразователь ускорения можно подавать постоянное ускорение с высокой точностью в течение необходимого времени. В настоящее время известны единичные экземпляры центрифуг, способных работать с преобразователями массой до нескольких килограммов и с ускорением до 6 · 105 м/с2. Центрифуги массового производства способны создать несколько более низкие ускорения.
На центрифуге можно калибровать только преобразователи ускорения поступательной вибрации, имеющие отклик на нулевой частоте.
Для проведения калибровки преобразователь ускорения устанавливают на столе или рычаге центрифуги таким образом, чтобы его ось чувствительности совпадала с радиусом окружности вращения. Ускорение a, действующее на преобразователь, можно рассчитать по формуле
a = ω2r, (13)
где ω - угловая частота вращения центрифуги;
r - расстояние от оси вращения до центра тяжести сейсмической массы преобразователя.
Преобразователь устанавливают на таком расстоянии от оси вращения, чтобы создаваемое при вращении отклонение его сейсмической массы было пренебрежимо мало по сравнению со значением r. Как правило, конструкция большинства преобразователей не позволяет измерить значение r непосредственно. Но его можно определить по результатам двух измерений, когда преобразователь устанавливают в разных точках с известным расстоянием между ними Dr. Частоты вращения центрифуги желательно выбирать такими, чтобы в обоих положениях на преобразователь действовало приблизительно одинаковое ускорение.
Расстояние r2 второй точки установки преобразователя от оси вращения можно определить по формуле
![]() (14)
(14)
где ω1 - угловая частота вращения центрифуги при установке преобразователя в первой точке на расстоянии r1 = r2 - Dr от оси вращения;
ω2 - угловая частота вращения центрифуги при установке преобразователя во второй точке на расстоянии r2 от оси вращения;
u1 - выходной сигнал преобразователя при угловой частоте ω1;
u2 - выходной сигнал преобразователя при угловой частоте ω2.
При известных значениях r2 и ω2 ускорение, действующее на преобразователь во второй точке, может быть определено по формуле (13).
Необходимости измерять расстояние r можно избежать, если известно, что выходной сигнал преобразователя прямо пропорционален действующему ускорению при его уменьшении вплоть до ускорения свободного падения g. В этом случае преобразователь сначала калибруют при ускорении, равном ± g, с помощью поворотной опоры. Затем преобразователь помещают на центрифугу и определяют частоту вращения ω1, при которой выходной сигнал соответствует ускорению g. Тогда ускорение a, при другой угловой частоте ω, рассчитывают по формуле
![]() (15)
(15)
Угловую частоту ω необходимо определять с более высокой точностью, чем расстояние r, так как приданое ускорение пропорционально квадрату угловой частоты. Большинство центрифуг, разработанных для целей калибровки, имеют тахометр, который измеряет частоту вращения с погрешностью не более 2 %. Еще большей точности можно достичь, используя стробоскоп или устройство (например, на основе фотоэлемента или магнита), производящее импульсы с частотой, пропорциональной частоте вращения центрифуги. Частота следования импульсов может быть определена с помощью электронного счетчика импульсов.
При калибровке электромеханических преобразователей на центрифуге вывод сигнала осуществляют через скользящие кольца и щетки. Так как преобразователи ускорения с откликом на нулевой частоте обладают относительно низким импедансом, то они не требуют специальных мер защиты от внешних полей и кабельного шума. Как правило, электрический шум вследствие износа скользящих колец при их правильном проектировании пренебрежимо мал. Однако некоторые преобразователи ускорения, использующие в качестве чувствительного элемента тензорезисторы, содержат в своем составе только один или два активных элемента с вынесенной наружу цепью моста Уитстона. Для таких преобразователей во избежание ложных сигналов, которые будут возникать в результате небольших изменений сопротивления скользящих колец, полный мост должен быть смонтирован на вращающемся столе. В качестве альтернативы может быть использован мост Кельвина.
Если преобразователь чувствителен к ускорениям в поперечном направлении, то при калибровке на небольших ускорениях значительное влияние может оказать сила тяжести. Поэтому преобразователь должен быть, по возможности, размещен на центрифуге таким образом, чтобы ось его максимальной чувствительности к поперечной вибрации находилась в горизонтальной плоскости.
При калибровке на центрифуге расширенная неопределенность измерений коэффициента преобразования по ускорению на нулевой частоте может не превышать 1 %. Однако такая калибровка не дает информации об изменении коэффициента преобразования во всем рабочем диапазоне частот преобразователя.
5.2.3.2. Наклонная центрифуга
Если ось вращения центрифуги не параллельна направлению силы тяжести, то ускорение, приданное преобразователю, закрепленному на центрифуге, кроме центростремительной составляющей ω2 · r, будет иметь переменную гравитационную составляющую g · sinθ · sin(ω · t), где θ - угол между осью вращения и вертикальной осью.
Влияние гравитационной составляющей ускорения на преобразователь, моделируемый массово-упругой системой, рассмотрено в [29]. При выполнении условий r = 0 и θ = 90° на преобразователь действует строго гармоническое ускорение. В этом случае неопределенность измерения гравитационной составляющей ускорения будет минимальна. При любой частоте вращения значение данной составляющей будет изменяться в диапазоне ± g. Максимальная частота вращения обычно не превосходит нескольких сотен герц и ограничена конструкцией центрифуги и возможностью ее балансировки.
5.2.3.3. Двойная центрифуга
Двойная центрифуга (см. [30]) состоит из малой центрифуги, установленной с эксцентриситетом на большой центрифуге, которая вращается относительно вертикальной оси в соответствии с 5.2.3.1 (см. рисунок 3).
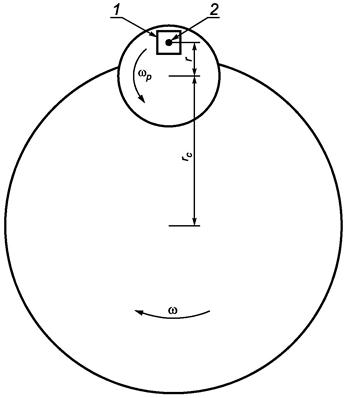
1 - испытуемый преобразователь; 2 - центр тяжести сейсмической массы преобразователя
Рисунок 3 - Двойная центрифуга
Преобразователь устанавливают на малую центрифугу, способную вращаться независимо. При вращении обеих центрифуг с постоянными угловыми скоростями ось чувствительности преобразователя изменяет свое направление относительно центра большой центрифуги с частотой (в Гц), равной угловой частоте (в об/с) малой центрифуги относительно большой. Составляющую ускорения a, действующую вдоль оси чувствительности преобразователя, в момент времени t определяют по формуле
где ω - угловая частота большой центрифуги, рад/с;
ωp - угловая частота малой центрифуги относительно большой центрифуги, рад/с;
rC - расстояние между центрами центрифуг, м;
r - расстояние между центром тяжести сейсмической массы преобразователя и центром малой центрифуги.
В формуле (16) знак плюс ставят, если направления вращения центрифуг совпадают, и минус, если они противоположны.
Если членом r(ω ± ωp)2 можно пренебречь, то ускорение вдоль оси чувствительности преобразователя становится гармоническим и его рассчитывают по формуле
![]() (17)
(17)
Наличие составляющей ускорения, направленной перпендикулярно к оси чувствительности, делает этот метод неприемлемым для преобразователей с высоким коэффициентом поперечного преобразования. Член r(ω ± ωр)2 в формуле (16) равен нулю, когда центрифуги вращаются с одинаковой частотой, но в противоположных направлениях.
Формула (17), описывающая строго гармоническое возбуждение, справедлива при выполнении следующих условий. Большая и малая центрифуга соединены ременной передачей таким образом, что центры шкивов большой и малой центрифуг совпадают с геометрическими центрами соответствующих центрифуг. Большая центрифуга приводится во вращение двигателем. В этом случае угловые частоты ω и ωр при вращении обеих центрифуг вокруг их центров будут всегда равны, но направления вращения противоположны.
Двойную центрифугу используют для создания гармонического ускорения с амплитудами до 500 м/с2 в диапазоне частот приблизительно от 0,7 до 10 Гц.
5.2.3.4. Калибратор с поворотной опорой
В данном методе калибровки гравитационное поле Земли используют для калибровки преобразователей прямолинейного ускорения с откликом на нулевой частоте и незначительным коэффициентом поперечного преобразования. Его применяют в диапазоне ускорений от минус g до плюс g. Калибруемый преобразователь закрепляют на платформе на конце рычага, ось которого может составлять угол j с вертикалью от 0° до 180°. Конец рычага снабжен стрелкой для считывания угла j на круговой шкале. Основание, к которому прикреплен преобразователь, должно быть тщательно выставлено в положение j = 0°. Круговая шкала позволяет определить положение рычага с точностью до ± 0,1° и выше.
Составляющую ускорения вдоль рычага определяют по формуле
a = gcosj. (18)
Изменение положения рычага на угол Dj изменяет значение составляющей ускорения вдоль оси рычага на величину Da, рассчитываемую по формуле
Da = gsinj Dj. (19)
Составляющую ускорения, перпендикулярную к оси чувствительности преобразователя, рассчитывают по формуле
at = gsinj. (20)
Если преобразователь обладает незначительным коэффициентом поперечного преобразования, то влиянием этой составляющей на результат калибровки можно пренебречь.
Примечание - Для достижения удовлетворительных результатов калибровки может потребоваться виброизоляция испытательного оборудования. Снизить воздействие вибрации испытательного оборудования позволяет также электронная фильтрация и усреднение в цепи измерения постоянного напряжения.
5.2.4. Калибровка ударом
Для измерения изменяющегося во времени ускорения может быть использована лазерная интерферометрия с подсчитыванием интерференционных полос и измерением временных интервалов (см. [38]). Посредством полиномиальной интерполяции измеренных в разные моменты времени перемещений и последующего двойного дифференцирования интерполяционной кривой получают сигнал ускорения. Для преобразователей ускорения высокого качества, измеряющих пиковое значение ускорения, разработан обладающий малой неопределенностью измерений метод калибровки с ударным возбуждением посредством подвешенных молота и наковальни (см. [39]). Большинство первичных методов калибровки ударом основаны на принципе изменения скорости (см. [26] и [31]). Это связано с тем, что скорость является физическим параметром, который легко измерить на практике. Обычно калибруемый преобразователь устанавливают на подвешенной наковальне, находящейся в состоянии покоя (см. [32]). Затем молотом ударяют по наковальне таким образом, чтобы вызвать ее кратковременное движение. Удар необходимо контролировать, чтобы изменение скорости не было слишком быстрым или слишком медленным и не возбудило частотные составляющие за пределами рабочих диапазонов средств измерений, а траектория движения тел была определена с требуемой точностью. Калибруемые преобразователи скорости или ускорения должны иметь массу много меньше массы наковальни. Направление оси чувствительности преобразователя должно точно совпадать с направлением силы удара. В процессе удара записывают временной выходной сигнал преобразователя. Сразу после удара измеряют приращение скорости наковальни Dv.
Скорость может быть определена путем измерения времени движения наковальни в пределах известного расстояния. Для включения электронного таймера можно использовать фотоэлектрические и магнитные преобразователи. Изменение скорости непосредственно зависит от ускорения, возбужденного ударом, и определяется формулой
![]() (21)
(21)
где Dv - приращение скорости, м/с;
a(t) - ускорение, м/с2.
Выходной сигнал определяется формулой
ur(t) = Sra(t), (22)
где Sr - коэффициент преобразования в единицах выходного сигнала на м/с2.
Объединение формул (21) и (22) позволяет рассчитать Sr по формуле
 (23)
(23)Используя формулу (23), можно калибровать преобразователи ускорения поступательной вибрации по выходным сигналам преобразователя во время баллистического удара. Если удар наносят по наковальне, расположенной на пружине с линейной характеристикой, то он имеет форму полусинусоидального импульса с площадью A = 0,637hb, где h и b - высота и ширина импульса соответственно. Форма и длительность импульсов обычно регулируются изменением массы, среды, в которой происходит удар, и начальных условий, таких как высота падения, давление воздуха или других параметров в зависимости от типа ударного стенда.
Оба метода (удар по подвешенной и по подпружиненной наковальне) применимы для получения значения Dv, необходимого для расчетов по формуле (23). Временной выходной сигнал преобразователя ускорения может быть зарегистрирован в процессе удара быстродействующим осциллографом или запоминающим осциллографом с фотографированием экрана. Градуировка шкал напряжения и времени может быть осуществлена подачей на прибор известного напряжения uc, действующего на интервале tc, и отсчетом по шкале показывающего устройства соответствующих показаний yc и xc. Градуировочные коэффициенты для шкалы напряжения K1 и для шкалы времени K2 рассчитывают по формулам:
 (24)
(24)Площадь A записанного выходного сигнала преобразователя рассчитывают по формуле
где x1 и х2 - время начала и конца удара;
y(x) - выходной сигнал напряжения.
Подстановка формул (24) и (25) в формулу (23) позволяет получить формулу для расчета коэффициента преобразования Sr
![]() (26)
(26)
Площадь A может быть получена графическим интегрированием записанного сигнала ускорения. Для этой цели обычно используют планиметр. При проведении графического интегрирования необходимо обращать внимание на положение нуля шкалы, точно определять момент окончания удара и выполнять сглаживание электронных шумов.
Площадь A может быть также определена по формуле (25) с использованием цепей аналогового интегрирования или цифровых интегрирующих (суммирующих) приборов. Это ускоряет процесс калибровки и уменьшает влияние субъективных ошибок оператора.
Первичные методы ударной калибровки преобразователей ускорения высокого качества, основанные на принципе изменения скорости, могут иметь неопределенность менее 5 % в большинстве практически используемых диапазонов амплитуд и длительностей удара. При этом предполагается, что калибруемый преобразователь имеет постоянный коэффициент преобразования в интересующем диапазоне частот. Если это условие не выполняется, то неопределенность калибровки оценить трудно. Кроме того, данный метод позволяет получить только значение модуля коэффициента преобразования и не дает никакой информации о фазочастотной характеристике преобразователя.
5.3. Калибровка методом сравнения
Преобразователь вибрации, калиброванный первичным методом, может быть использован в качестве эталонного для калибровки других преобразователей. Метод первичной калибровки по 5.2.1 является предпочтительным.
При калибровке методом сравнения эталонный и калибруемый преобразователи устанавливают так, чтобы они подвергались одинаковому входному воздействию, после чего измеряют их выходные сигналы u1 и u2 или их отношение. Если оба преобразователя калибруют по одной и той же величине, например по скорости или по ускорению, и если отклики обоих преобразователей линейны, то модуль коэффициента преобразования S2 калибруемого преобразователя связан с модулем коэффициента преобразования S1 эталонного преобразователя формулой
![]() (27)
(27)
Калибровка методом сравнения ограничена диапазоном частот, длительностью импульса и амплитудами, на которых была проведена калибровка эталонного преобразователя. Комплексный коэффициент преобразования S2 также может быть определен данным методом, если известна фазочастотная характеристика эталонного преобразователя и измерена разность фаз сигналов u1 и u2.
Если преобразователь должен быть калиброван по другой величине, чем калиброван эталонный преобразователь (например, преобразователь скорости калибруют методом сравнения с преобразователем ускорения), то в формуле для определения коэффициента преобразования необходимо использовать множитель jω в соответствующей степени.
Наилучших результатов обычно достигают, если преобразователи жестко установлены в положение «спина к спине», а их оси чувствительности совпадают с направлением движения. Необходимо убедиться в том, что оба преобразователя движутся одинаково. Если преобразователи имеют прямую форму и установлены на столе вибростенда, то влияния качательных движений стола будут пренебрежительно малы. Искажения формы сигнала обычно не являются критичными для калибровки методом сравнения, в отличие от первичных методов калибровки, особенно если оба преобразователя калибруют по одной и той же входной величине. Однако наличие высших гармоник во входном сигнале может по-разному отразиться на выходных сигналах преобразователей, поскольку их коэффициенты преобразования на частотах высших гармоник могут изменяться неодинаково.
Чаще всего калибровку выполняют с использованием электродинамического вибростенда. При установке преобразователей «спина к спине» эталонный преобразователь закрепляют на столе вибростенда. Калибруемый преобразователь устанавливают на верхней монтажной стороне эталонного. Для использования метода сравнения на высоких частотах эталонный преобразователь должен быть калиброван с нагрузкой, масса которой примерно равна массе калибруемого преобразователя.
Выходной сигнал предварительного усилителя эталонного преобразователя может быть с высокой точностью сравнен с выходным сигналом калибруемого преобразователя при помощи прецизионного усилителя с аттенюатором и сравнения сигналов настройкой компаратора на нулевое показание.
6. Выражение неопределенности измерений
Неопределенность измерений при калибровке представляют в виде расширенной неопределенности согласно Руководству ИСО/МЭК 98-3 (см. приложение А).
Приложение А
(рекомендуемое)
Выражение неопределенности измерений при калибровке
А.1. Общие положения
Значение расширенной неопределенности измерений U характеризует интервал от y - U до y + U вокруг измеренного значения y, являющегося оценкой одной из определяемых при калибровке характеристик Y, в пределах которого значение Y можно ожидать с большой вероятностью.
А.2. Вычисление расширенной неопределенности измерений
А.2.1. Необходимо выявить все источники, оказывающие существенное влияние на результат измерений, и, по возможности, внести коррекцию в результат измерений, уменьшающую это влияние.
Если источник неопределенности измерений может быть описан соответствующим распределением вероятности, имеющим значительное математическое ожидание, то это математическое ожидание следует рассматривать как систематическую погрешность и исключить из результата измерений.
А.2.2.
Каждый источник неопределенности характеризуют стандартным отклонением uj, называемым
стандартной неопределенностью, который представляет собой квадратный корень из
дисперсии ![]() .
.
Оценку некоторых
стандартных неопределенностей можно получить в результате статистической
обработки результатов серии измерений (оценки такого вида в Руководстве ИСО/МЭК
98-3 называют оценками типа А). Для остальных источников оценки стандартных
неопределенностей следует получать на основе обоснованных суждений о возможных
значениях данной величины (оценки типа В). Такие суждения должны опираться на
всю доступную информацию об источнике неопределенности. В частности, если отсутствует
какая-либо информация о возможных значениях величины, вызывающей
систематическое смещение результата измерений, за исключением того, что эти
значения лежат внутри интервала [b-; b+], то данную
величину можно считать равномерно распределенной в указанном интервале.
Стандартная неопределенность такой величины будет равна ![]() , где b = (b+ - b-)/2.
Математическое ожидание данной величины, которое используют для коррекции
результата измерений, равно (b+ + b-)/2.
, где b = (b+ - b-)/2.
Математическое ожидание данной величины, которое используют для коррекции
результата измерений, равно (b+ + b-)/2.
Если влияющая величина может рассматриваться равномерно распределенной (прямоугольное распределение плотности вероятности), но известно, что зависимость измеряемой величины от влияющей величины имеет вид нелинейной функции (синусоидальной, степенной и пр.), то это следует учитывать при выборе модели распределения измеряемой величины.
Пример - Коэффициент
преобразования S преобразователя
ускорения рассчитывают по выходному сигналу (амплитуде напряжения или заряда ![]() ),
обусловленному действием вибрации, и амплитуде ускорения â по формуле
),
обусловленному действием вибрации, и амплитуде ускорения â по формуле ![]() . На
результат измерений коэффициента преобразования может оказать влияние
значительная поперечная составляющая вибрации стола вибростенда, амплитуда
ускорения которой âТ. С учетом коэффициента поперечного
преобразования ST ускорение стола
в поперечном направлении даст соответствующий вклад в погрешность измерений
. На
результат измерений коэффициента преобразования может оказать влияние
значительная поперечная составляющая вибрации стола вибростенда, амплитуда
ускорения которой âТ. С учетом коэффициента поперечного
преобразования ST ускорение стола
в поперечном направлении даст соответствующий вклад в погрешность измерений ![]() в выходном
сигнале. Предполагая, что поперечное ускорение имеет ту же частоту, что и
ускорение в основном направлении возбуждения, что фазовый сдвиг равен нулю, а
также то, что поперечное ускорение обычно является синусоидальной функцией угла
b между
направлением максимальной поперечной чувствительности и направлением
поперечного движения стола вибростенда, данную составляющую погрешности можно
выразить формулой
в выходном
сигнале. Предполагая, что поперечное ускорение имеет ту же частоту, что и
ускорение в основном направлении возбуждения, что фазовый сдвиг равен нулю, а
также то, что поперечное ускорение обычно является синусоидальной функцией угла
b между
направлением максимальной поперечной чувствительности и направлением
поперечного движения стола вибростенда, данную составляющую погрешности можно
выразить формулой
![]()
Значения
максимального коэффициента поперечного преобразования и поперечного ускорения
могут быть известны (измерены), а угла b - нет. В
этом случае резонно предположить, что величина b распределена
равномерно в интервале [-p, +p]. В данном
примере влияющая величина (т.е. поперечное ускорение с прямоугольным
распределением b)
дает составляющую погрешности измерения ![]() , плотность вероятности
распределения которой имеет вид
, плотность вероятности
распределения которой имеет вид
Этому
распределению соответствует стандартная неопределенность ![]() . Математическое
ожидание
. Математическое
ожидание ![]() в данном случае
будет равно нулю. Полученный результат является лучшей оценкой погрешности
в данном случае
будет равно нулю. Полученный результат является лучшей оценкой погрешности ![]() .
.
А.2.3. В случае нескольких источников неопределенности определяют комбинированную стандартную неопределенность uc измерений величины Y через стандартные неопределенности u2(xi) и ковариации u(xi, хj) отдельных источников, используя закон распространения неопределенности
 (A.1)
(A.1)
Эта формула основана на приближении первого порядка разложения в ряд Тейлора функции
Y = f(X1, X2, ..., XN), (A.2)
где Y - измеряемая величина;
X1, X2, ..., XN - влияющие величины.
Оценку y измеряемой величины Y получают по формуле (А.2), подставляя в нее оценки влияющих величин x1, х2, ..., xN. Таким образом, результат измерений имеет вид
y = f(x1, x2, ..., xN). (A.3)
В формуле (А.1) множители
![]() часто
называют коэффициентами чувствительности.
часто
называют коэффициентами чувствительности.
В случае отсутствия существенных корреляций между влияющими величинами формула (А.1) упрощается и имеет вид
 (А.4)
(А.4)
Приближение
первого порядка разложения функции (А.2) в ряд Тейлора,
результатом чего является формула (А.1), возможно применять
только в том случае, если функция Y для каждой
независимой переменной близка к прямо или обратно пропорциональной зависимости
в пределах изменения этой переменной [интервала, характеризуемого
неопределенностью u(хi)]. Пример,
приведенный в А.2.2
(если угол b рассматривать
как входную величину xi), не
соответствует этому условию. Чтобы преодолеть это ограничение, была предложена
модель (см. [40]), суть которой можно пояснить на том же примере. В формулу для
измеряемой величины вводят в качестве дополнительной влияющей величины
множитель ![]() . Таким образом, применительно к данному
примеру имеют место три влияющие величины
. Таким образом, применительно к данному
примеру имеют место три влияющие величины
Y = f(X1, X2, X3),
где Y - измеряемая величина (коэффициент преобразования S);
X1 - амплитуда выходного сигнала преобразователя ускорения;
X2 - амплитуда ускорения;
![]()
Тогда формула (А.2) для данного примера примет вид
![]()
Это позволяет использовать первые два члена разложения ряда Тейлора функции Y для получения относительной комбинированной стандартной неопределенности (пренебрегая корреляцией между влияющими величинами):
Используя обозначения примера, формулу для относительной стандартной неопределенности коэффициента преобразования S можно записать в виде

где ![]() -
относительная неопределенность измерения амплитуды выходного сигнала
(напряжения или заряда);
-
относительная неопределенность измерения амплитуды выходного сигнала
(напряжения или заряда);
и(â)/â - относительная неопределенность измерения амплитуды ускорения;
![]() (как объяснено в примере).
(как объяснено в примере).
Аналогичный прием можно применить и в отношении других величин, влияющих на переменные уравнения измерений (А.2), когда эти величины можно включить в относительные погрешности переменных. Это позволит учитывать по отдельности каждый из множества источников неопределенности.
А.2.4. Определяют расширенную неопределенность U умножением uc на коэффициент охвата k
U = kuc.
Коэффициент охвата k обычно выбирают равным двум.
Если есть основания предполагать, что результаты калибровки имеют нормальное распределение, стандартное отклонение которого приблизительно равно uc, то можно утверждать, что искомая величина (характеристика, определяемая в процессе калибровки) лежит в интервале, определяемом U с вероятностью приблизительно 95 %.
А.2.5. Если используют значение коэффициента охвата k, отличное от двух, то в протоколе калибровки наряду с указанием значения расширенной неопределенности указывают также использованное значение коэффициента охвата.
Приложение
ДА (справочное)
Таблица ДА.1
|
Обозначение ссылочного международного стандарта |
Степень соответствия |
Обозначение и наименование межгосударственного стандарта |
|
ИСО 1101 |
- |
* |
|
ИСО 2041 |
- |
* |
|
ИСО 2954:1975 |
IDT |
ГОСТ ИСО 2954-97 Вибрация машин с возвратно-поступательным и вращательным движением. Требования к средствам измерений |
|
Руководство ИСО/МЭК 98-3 |
- |
* |
|
* Соответствующие национальные стандарты отсутствуют. До их утверждения рекомендуется использовать переводы на русский язык данных международных стандартов. Переводы международных стандартов находятся в Федеральном информационном фонде технических регламентов и стандартов. Примечание - В настоящей таблице использовано следующее условное обозначение степени соответствия стандартов: - IDT - идентичные стандарты. |
||
Библиография
|
[1] |
ISO 16063-11, Methods for the calibration of vibration and shock transducers - Part 11: Primary vibration calibration by laser interferometry |
|
[2] |
ISO 16063-21, Methods for the calibration of vibration and shock transducers - Part 21: Vibration calibration by comparison to a reference transducer |
|
[3] |
ISO 16063-22, Methods for the calibration of vibration and shock transducers - Part 22: Shock calibration by comparison to a reference transducer |
|
[4] |
ISO 5347-5, Methods for the calibration of vibration and shock pick-ups - Part 5: Calibration by Earths gravitation |
|
[5] |
ISO 5347-7, Methods for the calibration of vibration and shock pick-ups - Part 7: Primary calibration by centrifuge |
|
[6] |
ISO 5347-8, Methods for the calibration of vibration and shock pick-ups - Part 8: Primary calibration by dual centrifuge |
|
[7] |
ISO 5347-10, Methods for the calibration of vibration and shock pick-ups - Part 10: Primary calibration by high impact shocks |
|
[8] |
ISO 16063-31, Methods for the calibration of vibration and shock transducers - Part 31: Testing of transverse vibration sensitivity |
|
[9] |
ISO 5347-12, Methods for the calibration of vibration and shock pick-ups - Part 12: Testing of transverse shock sensitivity |
|
[10] |
ISO 5347-13, Methods for the calibration of vibration and shock pick-ups - Part 13: Testing of base strain sensitivity |
|
[11] |
ISO 5347-14, Methods for the calibration of vibration and shock pick-ups - Part 14: Resonance frequency testing of undamped accelerometers on a steel block |
|
[12] |
ISO 5347-15, Methods for the calibration of vibration and shock pick-ups - Part 15: Testing of acoustic sensitivity |
|
[13] |
ISO 5347-16, Methods for the calibration of vibration and shock pick-ups - Part 16: Testing of mounting torque sensitivity |
|
[14] |
ISO 5347-17, Methods for the calibration of vibration and shock pick-ups - Part 17: Testing of fixed temperature sensitivity |
|
[15] |
ISO 5347-18, Methods for the calibration of vibration and shock pick-ups - Part 18: Testing of transient temperature sensitivity |
|
[16] |
ISO 5347-19, Methods for the calibration of vibration and shock pick-ups - Part 19: Testing of magnetic field sensitivity |
|
[17] |
ISO 16063-12, Methods for the calibration of vibration and shock transducers - Part 12: Primary vibration calibration by the reciprocity method |
|
[18] |
ISO 5347-22, Methods for the calibration of vibration and shock pick-ups - Part 22: Accelerometer resonance testing - General methods |
|
[19] |
ISO 16063-13, Methods for the calibration of vibration and shock transducers - Part 13: Primary shock calibration using laser interferometry |
|
[20] |
ISO 16063-15, Methods for the calibration of vibration and shock transducers - Part 15: Primary angular vibration calibration by laser interferometry |
|
Hohmann, P. Schwingungsmessungen mit Laserinterferometern zur Kalibrierung von Aufnehmern, Acustica, 26, pp. 122 - 136 (1972) |
|
|
[22] |
Hohmann, P. and Martin, R. Kalibrierung eines Schwingungsaufnehmer-Vergieichsnormals, Physikalisch-Technische Bundesanstalt, Braunschweig (1968), VDI-Berichte Nr. 135 (1969) |
|
[23] |
Dererrari, H.A., Darby, R.A. and Andrews, F.A. Vibrational displacement and mode-shape measurement by a laser interferometer, Journal of the Acoustical Society of America, 52, No. 5, p. 982 (1967) |
|
[24] |
Actley, R.A. and Logue, S.H. A laser interferometer and its applications to vibration amplitude measurement, Proceedings, Institute of Environmental Sciences Annual Meeting, pp. 235 - 240 (1967) |
|
[25] |
Licht, Т., Bruel and Kjaer. Technical Review, No. 1 (1971) |
|
Harris, C.M. and Crede, C.E. Shock and Vibration Handbook, 3rd edn., McGraw-Hill (1987) |
|
|
[27] |
Levy, S. and Bouche, R.R. Calibration of vibration pick-ups by the reciprocity method, J. Research NBS, 57, No. 4, pp. 227 - 243 (1956) |
|
Bouche, R.R., Ensor, L.C. Use of reciprocity calibrated accelerometer standards for performing routine laboratory comparison calibration. Shock and Vibration Bulletin, 34 (4), 1965, pp. 21 - 29 |
|
|
Wildhack, W.A. and Smith, R.O. A basic method of determining the dynamic characteristics of accelerometers by rotation, Proceedings of the Instrument Society of America, 9, Part V (1995), p. 4 (Paper 54-40-3) |
|
|
Smith, R.O., Wills, E.A. and Hilten, J.S. A dual centrifuge for generating low-frequency sinusoidal accelerations, NBS Journal of Research, 66d, No. 4 (1962) |
|
|
Wittkowski, U. Stosspendelverfahren zum Kalibrieren und Prufen von Beschleunigungsmessgeräten, Technisches Messen tm, No. 9, pp. 323 - 328 (1979) |
|
|
Bouche, R.R. The absolute calibration of pickups on a drop-ball shock machine of the ballistic type, Endevco Corporation TP 206 (April 1961) |
|
|
[33] |
Lauer, G. Interferometrische Bestimmung der Belastungsabhängigkeit von Beschleunigungsaufnehmer-Vergleichsnormalen, Fortschritte der Akustik - FASE/DAGA 82, Göttingen |
|
v. Martens, H.-J. Dynamic calibration of rotational transducers by diffraction grating interferometry. PTB-Mitteilungen 103 (1993) 1, pp. 19 - 27 |
|
|
Clark, N.H. An improved method for calibrating reference standard accelerometers. Metrologia, 20 (1983), pp. 103 - 107 |
|
|
v. Martens, H.-J. Interferometric counting methods for measuring displacements in the range 10-9 m to 1 m. Metrologia, 24 (1987), pp. 163 - 170 |
|
|
Lewin, A.C., Rothe, V., Selbach, H. Laser doppler interferometer for applications in the automotive industry. Proc. of the 25th ISATA Symposium, Florence, 1992 |
|
|
v. Martens, H.-J., Täubner, A. Interferometric measurement of translational and rotational motion quantities. Recent advances in experimental mechanics. S. Gomez et al. (eds), Balkema, Rotterdam, 1994 |
|
|
v. Martens, H.-J., Schlaak, H.-J., Täubner, A. Interferometrische Kalibrierung von Translations - und Rotationsaufnehmern mit Sinus - und Stossanregung. Fortschritte der Akustik - DAGA 94, Teil B, pp. 681 - 684 |
|
|
[40] |
v. Martens, H.-J. and Rogazewski, P. Representation and transfer of the units of vibration quantities in the GDR. Bulletin OIML, No. 108, Sept. 1987 |
|
Ключевые слова: вибрация, удар, преобразователи, калибровка |