|
СОГЛАСОВАНО Московским
газотехническим Зам. Начальника __________________________Ю.К. Павлов «____» _________________ 1994 г. |
УТВЕРЖДЕНО Научно-производственным объединением «Монтажавтоматика», Генеральный директор ____________________А.С. Клюев «____» __________________ 1994 г. |
Руководящий материал РМ 13-1-94
МЕТОДИКА
проведения
пуско-режимно-наладочных
работ средств измерений и
автоматических
систем регулирования процессов
горения
паровых и водогрейных котлов.
Москва 1994
1. ОБЩИЕ ПОЛОЖЕНИЯ
Методика содержит рекомендации по проведению пуско-режимно-наладочных работ средств измерений (СИ) и автоматических систем регулирования (АСР) процессом горения энергетических парогенераторов тепловых электростанций, паровых и водогрейных котлов теплофикационных котельных на газовом и резервном топливе, а также других автоматических систем регулирования тепловыми процессами основного и вспомогательного оборудования установок, использующих газовое топливо.
Методика составлена с учетом требований органов Госгазнадзора к проведению наладочных работ на газоиспользующем оборудовании ОРД-2-87, утвержденном указом Главгазнадзора СССР от 23 марта 1987 г. № 4
Материал содержит указания по организации и последовательности проведения наладочных работ, методам расчета и реализации построения типовых автоматических систем регулирования, в схемах которых применена электронная аппаратура систем ГСП «Каскад», АКЭСР, «Контур», проведение испытаний с определением показателей качеств работы системы регулирования процесса горения.
Для более четкого восприятия отдельных положений содержание методики дается в повелительном наклонении, с цифровой рубрикацией и учетом соподчиненности материала.
1.1. Настоящая методика составлена применительно к производству наладочных работ и оформлению их результатов в АО НПО «Монтажавтоматика», с учетом разработок доктора технических наук А.Т. Лебедева и кандидата технических наук В.Д. Таланова кафедры АСУ ТЭС и АЭС ИГЭУ.
Она также полезна эксплуатационному персоналу промышленных предприятий при проведении пуско-режимно-наладочных работ автоматизированных объектов на газовом топливе.
1.1.1. Методика согласована Московским газотехническим территориальным центром государственного надзора России 15 марта 1994 т. и имеет ранг руководящего материала PM 13-1-94 НПО «Монтажавтоматика».
1.2. Методика составлена в соответствии с требованиями, изложенными в нормативных документах (1 - 7), в ней использованы методические указания (8 - 10) и публикации (11 - 13).
1.2.1. При оптимизации систем технологического контроля и автоматизации в ряде случаев полезно использовать теорию информации. Эти вопросы изложены в (14).
1.3. К наладке средств измерений и автоматизации (СИА) газовых, паровых и водогрейных котлов допускаются лица, прошедшие аттестацию на знание нормативных документов (1 - 6). Раз в три года персонал АО НПО «Монтажавтоматика» проходит обучение в учебном центре со сдачей экзаменов аттестационной комиссии во главе с главным инженером. Результаты экзаменов оформляются актом, после чего специалисту-наладчику выдается удостоверение на право производства пуско-режимно-наладочных работ на газовом оборудовании котельных.
1.4. Перечень приборов, необходимых для проведения наладочных работ СИА, дан в Приложении 1.
1.5. При наладке СИА газовых, паровых и водогрейных котлов должны быть выполнены следующие виды работ:
- подготовительные;
- лабораторные;
- промышленные.
1.6. Результаты наладки СИА оформляются техническим отчетом (см. раздел 6).
2. ПОДГОТОВИТЕЛЬНЫЕ РАБОТЫ
2.1. На основании письма организации, имеющей газоиспользующее оборудование, заключить договор на выполнение наладочных работ СИА.
2.2. Составить программу проведения наладочных работ и утвердить ее у главных инженеров «ЗАКАЗЧИКА» и «ИСПОЛНИТЕЛЯ» (Приложение 2.)
2.3. Провести обследование оборудования, подлежащего наладке, проверить правильность выполнении монтажных работ в соответствии с проектной документацией и требованиями СНиП 3.05.07-85.
2.4. Составить и передать «ЗАКАЗЧИКУ» ведомость дефектов и недоделок с указанием лиц ответственных за устранение дефектов, и сроков исполнения (Приложение 3.).
2.5. Организовать производственные помещения и рабочие места наладочного персонала.
2.6. Подготовить приборы и приспособления для проведения наладочных работ.
3. ЛАБОРАТОРНЫЕ РАБОТЫ
3.1. Внешний осмотр. Оценить общее состояние СИА: наличие механических дефектов, комплектующих изделий, арматуры, деталей. Проверить состояние закраски у регулирующих узлов, мест спаев и т.п.
3.2. Ревизия. Установить прибор в рабочее положение, проверять его исправность, прочистить контактные поверхности, смазать кинематические узлы.
3.3. Проверка изоляции. С помощью мегаомметра, напряжение которого не должно превышать регламентированного значения для самого слабого по изоляции элемента схемы, измерить сопротивление изоляции электропроводок, которое должно соответствовать требованиям заводов-изготовителей СИА.
3.4. Проверка метрологических характеристик средств измерений
3.4.1. Для проведения проверки метрологических характеристик средств измерений использовать образцовые средства измерения, верхний предел которых равен или больше верхнего предела измерений проверяемого СИ, а класс точности не менее чем в три раза выше класса точности проверяемого СИ.
3.4.2. Проверку проводить при прямом и обратном ходе значений образцового СИ не менее, чем в трех точках, соответствующих 10, 50 и 90 % шкалы проверяемого СИ. В протокол проверки метрологических характеристик СИ (Приложение 4) записать значение измеряемой величины в проверяемой точке, установленное образцовым СИ - X: показания проверяемого СИ при прямом - X' и обратном ходе - X''.
3.4.3. По полученным данным для каждой точки рассчитать:
- абсолютную погрешность и вариацию
∆' = X' - X; ∆'' = X'' - X; Н = |∆' - ∆''|:
- относительную погрешность и вариацию
![]()
![]()
![]()
- приведенную погрешность и вариацию
![]()
![]()
![]()
где Хn - нормирующее значение измеряемой величины, выраженное в тех же единицах измерения, что и ∆ (берется из НТД на СИ). При отсутствии данных по нормирующему значению Хn - его следует принять равным диапазону измерения СИ.
3.4.4. По результатам расчетов сделать вывод о пригодности СИ к эксплуатации.
Средство измерения признается годным к эксплуатации, если максимальная приведенная погрешность не превышает его класса точности и вариация не превосходит допустимого значения, указанного в НТД на СИ, или если максимальная относительная погрешность и вариация не превосходит основной погрешности и вариации, указанных в НТД на СИ.
При невыполнении указанных условий провести регулировку средства измерения и повторить проверку метрологических характеристик.
Если регулировка не приводит к уменьшению погрешностей, составить акт на дефектное средство измерения, служащий основанием для замены СИ (Приложение 5.).
3.5. Проверка коммутирующих устройств многоточечных СИ. Для проверки работы переключателя входных каналов необходимо объединить по входу все каналы и подать сигнал (50 % шкалы) на один из них. При разбросе показаний СИ произвести ревизию переключателя.
3.6. Проверка лентопротяжного механизма и качества записи самопищущих СИ. При проверке и ревизии лентопротяжного механизма обеспечить:
- совпадение пера с начальной линией диаграммы при положении указателя прибора на начальной отметке шкалы;
- соответствие скорости движения диаграммы ее установленному значению;
- бесперебойную подачу чернил или пасты;
- качественную запись;
- соответствие наносимых на диаграмму цифровых или цветовых отметок положению переключателя (для многоточечных приборов).
3.7. Проверка устройств сигнализации, встроенных в СИ. Определить погрешность срабатывания контактов при плавном увеличении и уменьшении измеряемой величины. Погрешность срабатывания контактов не должна превышать величины, указанной в НТД на СИ. Логика срабатывания сигнальных устройств («Много», «Мало», «Норма») должна соответствовать карте защит и сигнализации.
3.8. Проверка средств регулирования (СР). Объем и содержание проверки определяются типом СР и НТД на СР. В результате проверки оценить общую работоспособность СР.
3.9. Определение статических характеристик датчиков регулируемых параметров. Методика определения статических характеристик датчиков регулируемых параметров изложена в разделе 5
3.10. Результаты лабораторной проверки СИА занести в ведомость технического состояния СИА (Приложение 6).
4. ПРОМЫШЛЕННЫЕ РАБОТЫ
4.1. Проверка монтажа.
При проверке качества монтажа руководствоваться требованиями, изложенными в [5, 6] и заводских монтажно-эксплуатационных инструкций на СИА.
Проверке подлежит:
- правильность установки отборных и сужающих устройств;
- правильность установки первичных преобразователей, датчиков;
- соблюдение СНиП по прокладке импульсных линий;
- соблюдение СНиП по прокладке кабельных линий и электрических разводок;
- соблюдение СНиП по установке шкафов, щитов и пультов;
- прочность крепления аппаратуры;
- надежность соединения штепсельных разъемов;
- соответствие СИА проекту.
Результаты проверки монтажа оформить актом (Приложение 7).
4.2. Включение и опробование СИ.
Работы по включению и опробованию СИ проводить на неработающем оборудовании.
4.2.1. Для милливольтметров ввести поправку на температуру свободных концов термопары.
4.2.2. Для логометров проверить напряжение питания и точность подгонки сопротивления соединительных линий.
4.2.3. Для автоматических потенциометров проверить исправность прибора нажатием кнопки «Контроль», отрегулировать чувствительность усилителя, проверить работу медной катушки и целостность цепи термопары.
4.2.4. В автоматических мостах проверить их исправность нажатием кнопки «Контроль» и отрегулировать чувствительность.
4.2.5. В приборах давления проверить «Ноль» и ввести поправку на разность высот между отборным устройством и прибором.
4.2.6. Приборы расхода и уровня включать в работу после продувки и опресовки импульсных линий. Открыв уравнительный вентиль и закрыв один из запорных вентилей дифманометра, проверить установку «Ноля».
4.2.7. Для приборов газового анализа проверить установку «Ноля».
4.3. Включение и опробование средств регулирования (СР).
Работы по включению и опробованию СР проводить на неработающем оборудовании.
4.3.1. Проверить установку «Ноля» у функциональных и регулирующих приборов.
4.3.2. Проверить полярность подключения датчиков к функциональным и регулирующим приборам.
4.3.3. Проверить фазировку оперативного (выносного) задатчика.
4.3.4. Проверить направление перемещения исполнительного устройства от кнопок ручного управления.
4.3.5. Проверить направление перемещения исполнительного устройства при срабатывании релейного элемента регулирующего прибора.
4.3.6. Проверить настройку конечных выключателей исполнительных устройств.
4.3.7. Проверить время полного хода исполнительного механизма.
4.4. Наладка автоматических систем регулирования.
Этапы и методика наладки автоматических систем регулирования изложены в разделе 5.
4.5. Сдача СИА в эксплуатацию.
При сдаче СИА в эксплуатацию оформить акт приемки в эксплуатацию (Приложение 8). К акту необходимо приложить следующие документы:
- принципиальные схемы систем измерения и систем автоматизации с изменениями, внесенными при производстве пусконаладочных работ, согласованные с «ЗАКАЗЧИКОМ»;
- ведомость технического состояния средств измерения и автоматизации (Приложение 6);
- протоколы проверки метрологических характеристик средств измерений (Приложение 4);
- протоколы проверки статических характеристик датчиков регулируемых параметров (Приложение 9);
- протоколы определения рабочей расходной характеристики регулирующего органа (Приложение 10);
- акты приемо-сдаточных испытаний автоматической системы регулирования (Приложение 11).
5. НАЛАДКА АВТОМАТИЧЕСКИХ СИСТЕМ РЕГУЛИРОВАНИЯ
Наладку автоматических Систем регулирования (АСР) проводить на работающем оборудовании после наладки систем дистанционного управления, блокировок и технологических защит.
5.1. Этапы наладки АСР:
- определение статических характеристик датчиков регулируемых параметров;
- определение расходных характеристик регулирующих органов;
- определение динамических характеристик объекта регулирования;
- расчет параметров настройки регуляторов;
- корректировка параметров настройки на компьютерных тренажерах;
- статическая настройка регуляторов;
- динамическая настройка регуляторов;
- испытание АСР.
5.2. Определение статических характеристик датчиков регулируемых параметров.
5.2.1. Определение статических характеристик датчиков регулируемых параметров проводить в процессе выполнения лабораторных работ по наладке СИА.
5.2.2. Статическая характеристика датчика - зависимость выходного сигнала датчика от измеряемого параметра в установившемся режиме.
5.2.3. Крутизну статической характеристики датчика определяет номинальный статический коэффициент преобразования датчика
![]()
где ∆Y - диапазон изменения выходного сигнала, соответствующий диапазону изменения входного сигнала ∆X.
5.2.4. Для термоэлектрических преобразователей температуры (термопар) крутизна характеристики определяется для рабочего диапазона температуры по градуировочным характеристикам:
![]()
где ∆Е - диапазон термоЭДС, соответствующий рабочему диапазону температуры ∆Θ.
5.2.5. Для термометров сопротивления крутизна характеристики определяется для рабочего диапазона температуры по градировочным характеристикам:
![]()
где ∆R - диапазон изменения сопротивления, соответствующий рабочему диапазону температуры ∆Θ.
5.2.6. Для датчиков давления типа МЭД крутизна характеристики определяется экспериментально при лабораторной проверке в рабочем диапазоне давления:
![]()
где ∆U - диапазон изменения напряжения переменного тока, соответствующий рабочему диапазону давления ∆P.
5.2.7. Для датчиков давления УК «САПФИР» с унифицированным токовым выходным сигналом 0 ... 5 мА, крутизна характеристики определяется по диапазону измерения датчика и проверяется при лабораторных работах по наладке СИА:
mp = 100/Д, %/(кгс/см2),
где Д = Рв - Рн - диапазон измерения датчика;
Рв - верхний предел измерения;
Рн - нижний предел измерения.
5.2.8. Для датчиков массового расхода, состоящих из стандартного сужающего устройства и дифманометра типа ДМ, крутизна характеристики определяется в окрестности номинального значения расхода по паспортным данным сужающего устройства и крутизне характеристики дифманометра, которая определяется при лабораторной проверке:
![]()
где mp - крутизна характеристики дифманометра;
GH - номинальный массовый расход;
∆Pn - перепад давления на дифманометре по паспорту сужающего устройства, соответствующий максимальному расходу Gn.
5.2.9. Для датчиков объемного расхода, состоящих из стандартного сужающего устройства и дифманометра типа ДМ, крутизна характеристики определяется в окрестности номинального значения расхода по паспортным данным сужающего устройства и крутизне характеристики дифманометра, которая определяется при лабораторной проверке:
![]()
где mp - крутизна характеристики дифманометра;
QH - номинальный объемный расход;
∆Pn - перепад давления на дифманометре по паспорту сужающего устройства, соответствующий максимальному расходу QH.
5.2.10. Для датчиков расхода, состоящих из сужающего устройства и дифманометра - расходометра УК «Сапфир» и блока извлечения квадратного корпя типа БИК, крутизна характеристики определяется по максимальному расходу из паспорта на сужающее устройство:
mG = 100/Gmax, %/(м/ч)
или
mQ = 100/Gmax, %/(м3/ч),
где Gmax, Qmax - максимальные значения массового и объемного расходов по паспорту на сужающее устройство.
5.2.11. Результаты по определению статических характеристик датчиков регулируемых параметров оформить протоколом (Приложение 9).
5.3. Определение расходных характеристик регулирующих органов.
5.3.1. Определение расходных характеристик регулирующих органов (РО) проводить на работающем оборудовании при промышленных работах по наладке СИА.
5.3.2. Расходная характеристика РО - зависимость расхода среды от перемещения затвора при постоянном перепаде давления на РО.
5.3.3. Крутизну характеристики РО определяет номинальный статический коэффициент преобразования РО:
![]()
или
![]()
где ∆G, ∆Q - изменение массового или объемного расхода, соответствующее перемещению затвора на величину ∆S.
Перемещение затвора S выражают в % хода регулирующего органа, которые соответствуют % указателя положения РО (% УП).
5.3.4. На проведение работ по экспериментальному определению расходных характеристик РО разработать программу, которую утвердить у главных инженеров «ЗАКАЗЧИКА» и «ИСПОЛНИТЕЛЯ».
5.3.5. При проведении работ по определению расходных характеристик РО использовать штатные СИ-указатели положения РО и расходомеры.
5.3.6. Каждое изменение режима работы оборудования и перемещения РО сопровождать выдержкой времени, необходимой для стабилизации параметров.
5.3.7. Для определения формы расходной характеристики РО фиксировать пять положений РО в рабочем диапазоне.
5.3.8. Определить расходные характеристики РО при прямом и обратном ходе.
5.3.9. Не допускать при проведении работ по определению расходных характеристик РО аварийного отклонения параметров и нарушения режима работы оборудования.
5.3.10. В протокол определения рабочей расходной характеристики (Приложение 10) записать положение затвора РО-S, % УП: расход среды при прямом ходе - G'(Q'); расход среды при обратном ходе - G''(Q'').
где G - массовый расход среды, т/ч.
Q - объемный расход среды м3/ч.
5.3.11. По полученным результатам для каждой точки рассчитать относительную вариацию, которая определяет люфт РО:
![]()
или
![]()
где Gmax, Qmax - максимальный расход среды при S = 100 %.
5.3.12. Если люфт РО превышает 3 %, то регулирующий орган отправить на ревизию, после которой повторить определение расходной характеристики.
5.3.13. По усредненным в каждой точке значениям расхода:
![]() или
или
![]() ,
,
построить рабочую расходную характеристику РО:
G = ƒ(S) или Q = ƒ(S).
5.3.14. По расходной характеристике для заданного режима работы оборудования определить крутизну характеристики, для чего по значению (Sσ + 5) % находят расход среды G1 (O1), по (Sσ - 5) % находят расход среды G2 (Q2) и вычисляют крутизну характеристики РО как
![]() (m/ч)/%
УП
(m/ч)/%
УП
или
![]() (м3/ч)/% УП,
(м3/ч)/% УП,
где Sб - значение положения затвора РО (УП) для базового режима работы оборудования.
5.3.15. При работе оборудования в широком диапазоне нагрузок протоколы по определению расходной характеристики РО составить для максимальной и минимальной нагрузок.
5.3.16. Для двухскоростных дымососов и дутьевых вентиляторов в одном протоколе приводятся данные по определению расходных характеристик направляющих аппаратов при работе на первой и второй скоростях.
5.3.17. Результаты по определению расходных характеристик оформляются протоколом (Приложение 10).
5.4. Определение динамических характеристик объекта регулирования.
5.4.1. Определение динамических характеристик объекта регулирования проводить на работающем оборудовании при этом все защиты и блокировки должны быть включены и обеспечена безопасность проведения экспериментов.
5.4.2. Динамические характеристики объектов регулирования представляют в виде передаточных функций, которые получают путем аппроксимации кривых разгона (временных характеристик при однократном ступенчатом возмущении). Передаточные функции объектов регулирования используют для расчета параметров настройки регуляторов.
5.4.3. На проведение работ по экспериментальному определению динамических характеристик объектов регулирования разработать программу и утвердить ее у главных инженеров «ЗАКАЗЧИКА» и «ИСПОЛНИТЕЛЯ» (Приложение 2).
5.4.4. При проведении работ по определению динамических характеристик объектов регулирования использовать штатные СИ - регистрирующие приборы и специальные регистрирующие установки (КСП4 с приставками ПРТ).
5.4.5. Возмущение - испытательный сигнал, вносится путем перемещения регулирующего органа с помощью исполнительного механизма.
5.4.6. Величина перемещения РО должна составлять 10 + 15 % УП. Время действия испытательного сигнала на объектах с самовыравниванием должно быть больше времени установления нового значения регулируемой величины, а на объектах без самовыравнивания должно быть больше времени установления постоянной скорости изменения параметра. На объектах без самовыравнивания время действия испытательного сигнала должно быть меньше времени достижения регулируемым параметром предельно-допустимых значений (первый предел технологических защит).
5.4.7. Во время действия испытательного сигнала регулируемый параметр регистрируется самопишущим прибором при максимальной скорости движения диаграммы.
5.4.8. В процессе эксперимента оценить плавность кривой разгона (уровень помех на ней). Если уровень помех незначительный, то для обработки снять не менее четырех кривых разгона, в противном случае их количество довести до десяти.
5.4.9. Диаграммные ленты с записью кривых разгона приложить к протоколу наладки автоматической системы регулирования (Приложение 12).
5.4.10. Обработку экспериментальных кривых разгона (Рис. 1) провести в следующей последовательности: центрирование, сглаживание, нормирование, усреднение, апроксимация. Результаты обработки - параметры динамических характеристик занести в протокол наладки автоматической системы регулирования (Приложение 12).
5.4.10.1. Центрирование кривых разгона - смещение кривой разгона на величину начального значения регулируемого параметра (Рис. 2, а)
![]()
где уi(t) -значения регулируемого параметра для i-ой кривой разгона;
yoi - начальное значение регулируемого параметра для i-ой кривой разгона;
zi(t) - центрированные значения регулируемого параметра для i-ой кривой разгона;
i - номер кривой разгона.
5.4.10.2. Сглаживание центрированных кривых разгона при небольшом уровне помех осуществляется путем проведения плавной кривой вблизи экспериментальных точек (рис. 2, б); при большом уровне помех сглаживание проводят методом скользящего усреднения [11].
5.4.10.3. Нормирование проводиться путем деления ординат точек сглаженной кривой разгона на величину перемещения РО
![]()
где hi(t) - нормированные значения кривой разгона;
∆S - перемещение РО (возмущение).
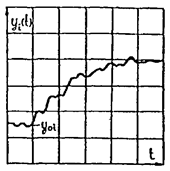
Рис. 1. Экспериментальная кривая разгона.
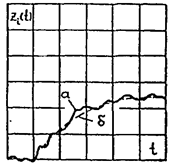
Рис. 2. а) Центрированная кривая разгона, б) Сглаженная кривая разгона.
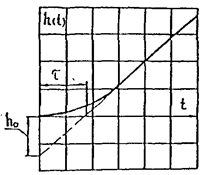
Рис. 3. Переходная характеристика объекта без самовыравнивания.
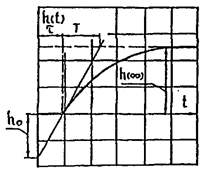
Рис. 4. Переходная характеристика объекта с самовыравниванием.
5.4.10.4. Усреднение нормированных кривых разгона на временных интервалах проводиться по формуле
![]()
где N - количество кривых разгона.
5.4.10.5. Апроксимация усредненных кривых разгона переходными характеристиками типовых линейных звеньев зависит от свойств самовыравнивания объектов регулирования. Цель апроксимации - определение параметров динамических характеристик объектов регулирования. Переходная характеристика (усредненная нормирования кривая разгона) для объектов без самовыравнивания показана на Рис. 3, для объектов с самовыравниванием - на Рис. 4.
Для объектов без самовыравнивания по переходной характеристике определить следующие параметры:
e = h0/t - скорость изменения регулируемого параметра (РП) при единичном ступенчатом возмущении РО, единица РП/(% УП·с);
τ - время чистого запаздывания, с.
Для объектов с самовыравниванием по переходной характеристике определить следующие параметры:
k = h (∞) - коэффициент передачи объекта регулирования при единичном ступенчатом возмущении РО, единица РП/% УП;
![]() - постоянная времени объекта
регулированиях, с;
- постоянная времени объекта
регулированиях, с;
τ - время чистого запаздывания, с.
5.4.11. В параметры объектов регулирования входят параметры соответствующих регулирующих органов:
![]()
![]()
где ms - крутизна характеристики РО, единица расхода /% УП;
e0 - скорость изменения регулируемого параметра при единичном ступенчатом возмущении расходом среды, единица РП/(единица расхода · с);
k0 - коэффициент передачи технологического участка при единичном ступенчатом возмущении расходом среды, единица РП/единица расхода.
5.4.12. Передаточная функция для объекта без самовыравнивания
![]()
Передаточная функция для объекта с самовыравниванием
![]()
5.4.13. Примеры объектов регулирования.
5.4.13.1. Топливоподающие устройства.
Регулируемый параметр - расход топлива. Возмущение - изменение положения затвора регулирующего органа (дроссельный клапан или заслонка). Объект с самовыравниванием, малоинерционный.
5.4.13.2. Водопитательный тракт.
а) Регулируемый параметр - расход питательный воды. Возмущение - изменение положения регулирующего питательного клапана. Объект с самовыравниванием, малоинерционный.
б) Регулируемый параметр - уровень воды. Возмущение - изменение положения регулирующего питательного клапана. Объект без самовыравнивания.
5.4.13.3. Воздушный тракт.
а) Регулируемый параметр - разрежение в топке. Возмущение - изменение положения направляющего аппарата дымососа. Объект с самовыравниванием, малоинерционный.
б) Регулируемый параметр - содержание О2 (коэффициент избытка воздуха). Возмущение - изменение положения направляющего аппарата дутьевого вентилятора. Объект с самовыравниванием, малоинерционный.
5.5. Расчет параметров настройки регуляторов.
5.5.1. Цель расчета - определение приближенных значений параметров настройки релейно-импульсных ПИ-регуляторов.
Статические параметры настройки:
- чувствительность по регулируемому параметру (коэффициент масштабирования) - αpn
- нечувствительность по регулируемому параметру (зона нечувствительности) - ∆, %.
Динамические параметры настройки:
- коэффициент пропорциональности - αп, с/% (скорость связи - VCB, %/с;)
- время изодрома - τи, с;
- время демпфирования (фильтра) - τФ, с;
- время импульса - tи, с.
Для задатчика необходимо определить цену деления - С3g, единица РП.
5.5.2. Результаты расчета привести в техническом отчете.
5.5.3. Расчет статических параметров настройки регуляторов.
5.5.3.1. При подключении регулируемого параметра на масштабируемый вход чувствительность определяется величиной коэффициента масштабирования и изменяется в пределах αрп = 0 ... 1. Чувствительность по регулируемому параметру и зона нечувствительности связаны соотношением:
∆ = ∆pnmpnαpn, %,
где ∆pn - зона нечувствительности в единицах регулируемого параметра;
mpn - крутизна характеристики датчика регулируемого параметра, %/единица РП;
αpn - чувствительность по регулируемому параметру.
Зона нечувствительности по регулируемому параметру ∆pn определяется технологическими требованиями к статической точности поддержания регулируемого параметра и выбирается в пределах 1 + 2 % номинального значения регулируемого параметра. При больших пульсациях параметра (разрежение в топке, давление воздуха) возникает необходимость увеличения зоны нечувствительности до 3 + 5 % номинального значения регулируемого параметра.
Значение mpn определяется в процессе лабораторных работ.
Принять максимальную чувствительность, т.е. αpn = 1, и вычислить значение ∆. Если расчетное значение зоны нечувствительности больше максимально возможного значения для данного типа регулятора ∆ > ∆max, то величину чувствительности αpn уменьшить. При подключении регулируемого параметра на немасштабируемый вход чувствительность αpn = 1.
Максимальная величина зоны нечувствительности некоторых ПИ-регуляторов:
для регулятора РС29 (Контур 2) 4 %;
для регулятора РП4 (АКЭСР2) 2 %;
для регулятора Р27 (Каскад 2) 2 %.
5.5.4. Определение цены деления задатчика.
В общем случае регуляторы имеют два задатчика - оперативный (внешний) и неоперативный (внутренний). Задатчик характеризуется диапазоном действия - ∆X3D (%) и количеством делений - N3D.
Диапазон действия задатчика в единицах регулируемого параметра:
![]() единица
РП.
единица
РП.
где a3D - коэффициент масштабирования диапазона действия задатчика;
mрn - крутизна характеристики датчика регулируемого параметра, %/единица РП;
apn - чувствительность по регулируемому параметру.
Цена деления задатчика
C3D = Д3D/N3D, единица РП.
При подключении двух задатков к регулятору внутренний выполняет роль корректора диапазона и имеет диапазон действия 100 %, внешний - роль точного задатчика и имеет диапазон действия ±5 % (10 % задатчик). В этом случае цена деления для корректора (N3D = 100 дел.)
![]() единица РП;
единица РП;
для оперативного задатчика (N3D = 100 дел.)
![]() единица РП;
единица РП;
Цену деления задатчика внести в протокол наладки автоматической системы регулирования (Приложение 12).
5.5.5. Расчет динамических параметров настройки необходимо проводить в последовательности:
- по параметрам динамических характеристик объекта регулирования рассчитать параметры ПИ-закона регулирования;
- по параметрам ПИ-закона регулирования рассчитать параметры настройки ПИ-регулятора.
5.5.5.1. Определение kП и ТИ:
Уравнение ПИ-закона регулирования имеет вид:
![]()
где μ - управляющее воздействие,
e - сигнал рассогласования,
kп - коэффициент пропорциональности ПИ-закона регулирования,
Ти - время интегрирования.
Величины kп и Ти определяют по эмпирическим формулам в зависимости от свойств объекта регулирования и параметров его динамической характеристики. Для объектов без самовыравнивания:
![]() Tи = 5τ.
Tи = 5τ.
Для объектов с самовыравниванием:
при 0,1 < τ/Т < 0,2: ![]() Ти
= 3,3τ
Ти
= 3,3τ
при 0,2 < τ/Т < 1,5:  Ти = 0,8T;
Ти = 0,8T;
при τ/Т > 1,5: kп = 0,5К, Ти = 0,6τ.
5.5.5.2. Определение αп и τи.
Уравнение релейно-импульсного ПИ-регулятора совместно исполнительным механизмом постоянной скорости перемещения РО:
где S - перемещение затвора регулирующего органа, % УП;
αп - коэффициент пропорциональности ПИ-регулятора, с/%;
100 - полный ход исполнительного механизма, %;
Тм - время полного хода исполнительного механизма, с;
τи - время изодрома, с.
Величина αп и τи определяют по найденным значениям Кп и Ти. Время полного перемещения исполнительного механизма Тм определяют на этапе опробования средств регулирования.
Коэффициент пропорциональности на релейно-импульсном ПИ-регуляторе устанавливают равным
![]()
Время изодрома, на релейно-импульсном ПИ-регуляторе (или ближайшее к нему при дискретной установке времени изодрома) устанавливают равным
![]()
5.5.5. Время демпфирования τф и время импульса τи не рассчитывают и определяют в процессе испытания автоматических систем регулирования.
5.5.6. Формулы, по которым рассчитывают параметры настройки ПИ-регулятора, составлены для переходных процессов со степенью затухания 0,75 при ступенчатом возмущении регулирующим органом. Настройку автоматических систем регулирования на степень затухания переходного процесса 0,9 + 0,95 и минимум квадратичной интегральной оценки проводить на компьютерном тренажере, а затем на работающем оборудовании, используя итерационные методы настройки:
- метод отработки возмущения за одно включение;
- метод пошаговой оптимизации.
5.6. Корректировка параметров настройки регуляторов на компьютерных тренажерах.
5.6.1. Компьютерный тренажер реализован с помощью прикладной программы, установленной на IBM или совместимых компьютерах.
5.6.2. Прикладная программа разрабатывается на основании технического задания (Приложение 14) «ЗАКАЗЧИКА», за его счет, используется в процессе эксплуатации автоматических систем регулирования оборудования. По вопросам приобретения программы обращаться на кафедру АСУ ТЭС и АЭС Ивановского государственного энергетического университета.
5.6.3. Тренажер обеспечивает:
- моделирование поведения оборудования в режимах работы автоматических систем регулирования;
- моделирование всех элементов автоматических систем регулирования (датчиков, регуляторов, исполнительных механизмов, регулирующих органов);
- настройку регуляторов по статическим и динамическим параметрам;
- моделирование работы защит и блокировок;
- обработку переходных процессов, кривых разгона и статических характеристик элементов автоматических систем регулирования.
5.7. Статическая настройка регуляторов.
5.7.1. Настройка зоны нечувствительности.
1 этап. Ключ режима управления установить в положение «РУЧ».
2 этап. Установить на регуляторе органы настройки в следующие положения:
- зона нечувствительности ∆ - расчетная;
- время импульса τи - максимальное;
- коэффициент пропорциональности αп - максимальный;
- время изодрома τи - максимальное;
- время демпфирования τф - минимальное;
- чувствительность по регулируемому параметру αpn - 0,0;
- внутренний задатчик - 0,0.
3 этап. Нанести возмущение задатчиком не более 5 %.
4 этап. Если в регуляторе возникнет режим автоколебаний (поочередное включение индикаторов «БОЛЬШЕ», «МЕНЬШЕ» на регуляторе), то уменьшить время импульса до середины диапазона. Если при этом автоколебания подавить не удается, увеличивать зону нечувствительности.
5 этап. Если в процессе настройки величина зоны нечувствительности получилась отличной от расчетной, произвести перерасчет чувствительности по регулируемому параметру αpn. Если при этом αpn > 1, то необходимо ставить вопрос о замене датчика регулируемого параметра на датчик с большей крутизной характеристики.
5.7.2. Балансировка регулятора.
1 этап. Ключ режима управления установить в положение «РУЧ».
2 этап. Установить на регуляторе органы настройки в следующие положения:
- коэффициент пропорциональности αп - максимальный;
- время изодрома τи - минимальное;
- время демпфирования τф - максимальное;
- чувствительность по регулируемому параметру αpn - расчетная.
3 этап. Внутренним задатчиком или корректором добиться баланса регулятора - грубо по потуханию индикаторов «БОЛЬШЕ», «МЕНЬШЕ» и точно при измерении сигнала рассогласования вольтметром постоянного тока на пределе 1 В.
4 этап. Уменьшить время демпфирования до минимума и проверить частоту включения индикаторов «БОЛЬШЕ», «МЕНЬШЕ». Если регулятор часто срабатывает в разные стороны, то это указывает на наличие пульсаций (измерительных помех). Увеличивая время демпфирования, добиться прекращения срабатывания регулятора.
5.8. Динамическая настройка регуляторов.
5.8.1. Метод отработки возмущения за одно включение.
Метод применяется при наладке автоматических систем регулирования с малоинерционными объектами с самовыравниванием.
1 этап. Установить на регуляторе органы настройки в следующие положение
- коэффициент пропорциональности αп - расчетный;
- время изодрома τи - расчетное.
2 этап. Проверить цену деления задатчика. Для этого ключ режима управления перевести в положение «АВТ», нанести небольшое возмущение задатчиком (внешним 10 % задатчиком до 20 делений, внутренним 100 % до 5 делений) и наблюдать за изменением регулируемого параметра. Параметр должен установиться на величину количества делений умноженной на цену деления задатчика.
3 этап. Стабилизируют процесс. Ключ режима управления перевести в положение «АВТ» и нанести задатчиком возмущение, допустимое по условиям технологии. После первого включения регулятора ключ поставить в положение «РУЧ» и наблюдать за изменением регулируемого параметра. Если параметр, установленный регулятором за одно включение, меньше заданного, то коэффициент пропорциональности увеличить, в противном случае - уменьшить. Изменяя αп, добиться точной отработки возмущения за одно включение.
4 этап. Повторяют 3 этап, но после первого включения регулятора ключ режима управления оставить в положении «АВТ» и наблюдать за направлением дальнейших срабатываний регулятора. Если регулятор продолжает включаться в ту же сторону, необходимо увеличить время изодрома, если в противоположную - уменьшить. Корректировку τи продолжать до тех пор, пока последующих включений не будет.
5.8.2. Метод пошаговой оптимизации с оценкой качества переходного процесса на каждом шаге.
1 этап. Установить завышенное время изодрома и изменением коэффициента пропорциональности добиться переходного процесса с колебательной составляющей.
2 этап. При постоянном коэффициенте пропорциональности (αп) уменьшением времени изодрома добиться исчезновения апериодической составляющей в переходном процессе.
3 этап. При постоянном значении времени изодрома путем уменьшения коэффициента пропорциональности добиться переходного процесса с заданной степенью затухания.
5.9. По результатам статической и динамической настройки составить протокол наладки автоматической системы регулирования (Приложение 12) и карту параметров настроек функциональных и регулирующих приборов (Приложение 13).
5.10. Испытание автоматических систем регулирования. Испытанием автоматических систем регулирования завершаются наладочные работы. Во время испытаний оценивается качество работы регуляторов и проводится при необходимости корректировка настройки регуляторов.
Одноконтурные автоматические системы регулирования испытывают при типовых возмущениях внутренних - регулирующим органом и внешних - задатчиком с визуальной оценкой качества переходных процессов по щитовым приборам.
Двухконтурные автоматические системы регулирования испытывают с автоматической регистрацией основных параметров по специальной программе.
В программе должны быть определены: цель испытаний, условия проведения испытаний, порядок проведения испытаний и указаны ответственные лица.
Условия проведения испытаний:
- на агрегате включают устройства защиты и блокировок;
- агрегат выводят на режим, рассчитанный на работу регулятора;
- при работе на агрегате нескольких регуляторов первую очередь испытывают регуляторы, которые устраняют возмущения, идущие от других регуляторов;
- наносимые возмущения должны находиться в диапазоне регулирования.
По результатам испытаний АСР оформить акт приемо-сдаточных испытаний автоматических систем регулирования (Приложение 11) и записать параметры в соответствующую карту.
6. ТЕХНИЧЕСКИЙ ОТЧЕТ
6.1. По результатам наладочных работ СИА составить технический отчет, который утвердить у главного инженера «ИСПОЛНИТЕЛЯ» и согласовать с главным инженером «ЗАКАЗЧИКА».
6.2. Требования к содержанию технического отчета.
1. Общие сведения.
Указать основания для проведения работ (номера и даты договора, разрешения на проведение наладочных работ), объем и виды выполненных работ, сроки выполнения, перечень лиц, проводивших работу, с указанием должностей.
2. Характеристика оборудования.
Привести основные технические данные технологического оборудования, режимные карты, перечень автоматических систем регулирования, перечень технологических защит с уставками срабатывания.
3. Состав наладочных работ.
Перечислить виды выполненных лабораторных и промышленных работ со сроками их проведения.
4. Результаты работ.
В этот раздел включить все материалы не получившие отражение в актах, протоколах и ведомостях.
По результатам лабораторных работ: оценка общего состояния СИА, ревизия, проверка изоляции, проверка коммутирующих устройств, проверка лентопротяжного механизма и качества записи, проверка средств регулирования, проверка устройств сигнализации.
По результатам промышленных работ: включение и опробование СИ, включение и опробование СР, обработка диаграмм по определению динамических характеристик объектов регулирования, расчет параметров настроек регулятора, результаты испытаний АСР на компьютерном тренажере.
5. Заключение.
Привести перечень систем измерений и автоматических систем регулирования переданных в эксплуатацию. Изложить рекомендации эксплуатационному персоналу по обслуживанию СИА.
6. Приложения.
К техническому отчету приложить следующие документы:
1. Договор на выполнение наладочных работ СИА;
2. Программу проведения наладочных работ;
3. Акт проверки монтажа СИА;
4. Акт приемки средств измерения и автоматизации в эксплуатацию с приложениями:
4.1. Принципиальные схемы систем измерения и автоматизации;
4.2. Ведомость технического состояния средств измерения и автоматизации;
4.3. Протоколы проверки метрологических характеристик средств измерений;
4.4. Протоколы проверки статических характеристик датчиков регулируемых параметров;
4.5. Протоколы определения рабочих расходных характеристик регулирующих органов;
4.6. Акты приемо-сдаточных испытаний автоматических систем регулирования с приложением:
4.6.1. Протоколов наладки АСР с приложениями:
4.6.1.1. Карт параметров настроек;
4.6.1.2. Диаграммных лент.
6.3. Передача технического отчета «ЗАКАЗЧИКУ» служит основанием для подписания документов о взаимных расчетах.
7. Использованная и рекомендуемая нормативно-техническая документация и литература.
1. Требование органов Госгазнадзора СССР к проведению наладочных работ на газоиспользующем оборудовании. ОРД-1-87. Утверждены приказом № 4 от 23.03.87 г. Главгазнадзора СССР.
2. Порядок получения разрешения органов Госгазнадзора на пуск газа на установки для проведения пуско-наладочных работ, режимно-наладочных работ и промышленное потребление газа. ОРД-2-87. Утверждены приказом № 16 от 23.03.87 г. Главгазнадзора СССР.
3. Правила пользования газом в народном хозяйстве. - М.: Недра, 1988 г.
4. Правила безопасности в газовом хозяйстве. - М.: Недра, 1980 г.
5. Правила технической эксплуатации электрических станций и сетей. - М.: Энергия, 1977 г.
6. Строительные нормы и правила. СНиП 2.04.08-87; СНиП 3.05.05-85; СНиП 3.05.07-85; СНиП IV-4-80 Госстрой СССР.
7. Временные методические указания по наладке автоматических систем регулирования на электростанциях. - М.: Союзэнерго, 1978 г.
8. Методические указания по наладке АСР, реализованных на базе аппаратуры ГСП «Каскад» и АКЭСР. МУ 34-70-087-86. - М.: Союзтехэнерго, 1986 г.
9. Методические указания по наладке автоматических регуляторов тепловых процессов. МНУ. - М.: ЭЦМ, 1984 г.
11. Наладка средств измерений и систем технологического контроля: Справочное пособие / А.С. Клюев, Л.М. Пин, Е.И. Коломнец, С.А. Клюев; Под редакцией А.С. Клюева, - 2-е издание переработанное и дополненное. - М.: Энергоатомиздат, 1990 г.
12. Наладка средств автоматизации и автоматических систем регулирования: Справочное пособие / А.С. Клюев, А.Т. Лебедев и др.; Под редакцией А.С. Клюева, - 2-е издание переработанное и дополненное. - М.: Энергоатомиздат, 1989 г.
13. Наладка систем автоматического регулирования барабанных паровых котлов / А.С. Клюев, А.Т. Лебедев, С.И. Новиков, - М.: Энергоатомиздат, 1985 г.
14. Клюев А.С. Лебедев А.Т. Оптимизация систем технологического контроля и автоматизация: Информационный подход. - М.: Энергоатомиздат, 1994 г.
Приложения
Приложение 1.
|
АО НПО «Монтажавтоматика» |
|||||
|
Перечень приборов, необходимых для производства наладочных работ |
|||||
|
№ п/п |
Наименование, характеристики |
Тип |
Единица измерения |
Диапазон измерения |
Количество |
|
1. |
Грузопоршневой манометр класс точности 0,5 |
МТУ-60 |
кгс/см2 |
1 |
|
|
2. |
Манометр образцовый класс точности 0,1 ... 0,25 |
МО |
кгс/см2 |
0 ... 1 |
1 |
|
0 ... 2,5 |
|||||
|
0 ... 6 |
|||||
|
0 ... 10 |
|||||
|
0 ... 25 |
|||||
|
3. |
Чашечный манометр класс точности 0,5 |
ППР-2М |
мм.вод.ст |
0 ... 1000 |
1 |
|
4. |
Микроманометр с переменным углом наклона трубки класс точности 0,5 |
ММН-40 |
1 |
||
|
5. |
Ламповый вольтметр постоянного тока |
п. 7 - 26 (п. 7 - 17) |
1 |
||
|
6. |
Миллиамперметр постоянного тока, класс точности 0,5 |
М253 (МА-11) |
мА |
0 ... 0,75 |
1 |
|
0 ... 1,5 |
1 |
||||
|
0 ... 7,5 |
1 |
||||
|
7. |
Мегаоммер (500 В) |
М101 |
1 |
||
|
8. |
Электросекундомер класс точности 3,0 |
С-1-2А |
мин |
0 ... 30 |
1 |
|
9. |
Вольтметр переменного тока |
В |
0 ... 75 |
1 |
|
|
10. |
Комбинированный измерительный прибор |
Ц-4312 (Ц-4315) |
3 |
||
|
11. |
Блок питания стабилизированный с защитой на 2п |
Б-5-35 |
В |
0 ... 50 |
2 |
|
12. |
Магазин сопротивлений |
Р-33 |
2 |
||
|
13. |
Мост измерения емкости |
Р583 |
1 |
||
|
14. |
Мост измерения индуктивности |
Р591 |
1 |
||
|
15. |
Катушка взаимной индуктивности измерительной |
Р536 |
1 |
||
|
16. |
Вакуумметр образцовый |
ВО |
МПа |
0 ... -0,6 |
1 |
|
17. |
Генератор |
Г-4-62 |
1 |
||
|
18. |
Термостат |
ТС16 |
1 |
||
|
19. |
Осциллограф |
С-1-101 |
1 |
||
|
20. |
Переносной потенциометр |
ПП-63 |
1 |
||
|
21. |
Регистрирующая установка с приставками ПРТ |
КСП-4 |
1 |
||
Приложение 2.
|
АО НПО «Монтажавтоматика» |
||||||||
|
Наименование объекта |
||||||||
|
УТВЕРЖДАЮ |
УТВЕРЖДАЮ |
|||||||
|
Главный инженер ЗАКАЗЧИКА |
Главный инженер ИСПОЛНИТЕЛЯ |
|||||||
|
____________________ |
____________________ |
|||||||
|
« ___ » _____________ |
« ___ » _____________ |
|||||||
|
ПРОГРАММА |
||||||||
|
проведения наладочных работ средств измерения и автоматизации (СИА) |
||||||||
|
№ п/п |
Содержание работ |
Начало работы |
Окончание работы |
|||||
|
программу составил: |
||||||||
|
___________________ |
___________________ |
___________________ |
« ___ » _____________ |
|||||
|
должность |
подпись |
Ф. И. О. |
дата |
|||||
Приложение 3.
|
АО НПО «Монтажавтоматика» |
||||||||
|
Наименование объекта: |
||||||||
|
УТВЕРЖДАЮ |
УТВЕРЖДАЮ |
|||||||
|
Главный инженер ЗАКАЗЧИКА |
Главный инженер ИСПОЛНИТЕЛЯ |
|||||||
|
____________________ |
____________________ |
|||||||
|
« ___ » _____________ |
« ___ » _____________ |
|||||||
|
ВЕДОМОСТЬ |
||||||||
|
дефектов и недоделок |
||||||||
|
№ п/п |
Наименование дефекта или недоделки |
Ответственный за устранение |
Срок устранения |
|||||
|
ведомость составил: |
||||||||
|
___________________ |
___________________ |
___________________ |
« ___ » _____________ |
|||||
|
должность |
подпись |
Ф. И. О. |
дата |
|||||
Приложение 4.
|
АО НПО «МОНТАЖАВТОМАТИКА» |
|||||||||
|
Наименование объекта: |
|||||||||
|
ПРОТОКОЛ № ____ |
|||||||||
|
проверки метрологических характеристик средств измерений |
|||||||||
|
Данные на СИ |
|||||||||
|
Тип |
Измеряемый параметр |
||||||||
|
Заводской номер |
Класс точности |
||||||||
|
Пределы измерения |
Вариация |
||||||||
|
Данные проверки |
|||||||||
|
Показатель |
Контрольные точки |
||||||||
|
10 % |
50 % |
90 % |
|||||||
|
Значение измеряемой величины, установленное образцовым СИ |
|||||||||
|
Значение измеряемой величины по проверяемому СИ |
прямой ход |
||||||||
|
обратный ход |
|||||||||
|
Погрешность |
прямой ход |
абсолютная |
|||||||
|
относительная |
|||||||||
|
приведенная |
|||||||||
|
обратный ход |
абсолютная |
||||||||
|
относительная |
|||||||||
|
приведенная |
|||||||||
|
Вариация |
абсолютная |
||||||||
|
относительная |
|||||||||
|
приведенная |
|||||||||
|
Проверку произвел: |
|||||||||
|
___________________ |
___________________ |
___________________ |
« ___ » _____________ |
||||||
|
должность |
подпись |
Ф. И. О. |
дата |
||||||
Приложение 5.
|
АО НПО «МОНТАЖАВТОМАТИКА» |
||||||
|
Наименование объекта: |
||||||
|
УТВЕРЖДАЮ |
||||||
|
Главный инженер ЗАКАЗЧИКА |
||||||
|
____________________ |
||||||
|
« ___ » _____________ |
||||||
|
АКТ № ____ |
||||||
|
на дефектное средство измерения |
||||||
|
Наименование СИ |
||||||
|
Тип |
||||||
|
Заводской номер |
||||||
|
В связи с отклонениями метрологических характеристик от нормы указанное средство измерения подлежит замене. |
||||||
|
Приложение: ПРОТОКОЛ № ____ проверки метрологических характеристик СИ |
||||||
|
|
||||||
|
|
||||||
|
|
||||||
|
Представитель заказчика |
||||||
|
___________________ |
___________________ |
___________________ |
« ___ » _____________ |
|||
|
должность |
подпись |
Ф. И. О. |
дата |
|||
|
Представитель исполнителя |
||||||
|
___________________ |
___________________ |
___________________ |
« ___ » _____________ |
|||
|
должность |
подпись |
Ф. И. О. |
дата |
|||
Приложение 6.
|
АО НПО «МОНТАЖАВТОМАТИКА» |
|||||||
|
Наименование объекта: |
|||||||
|
ВЕДОМОСТЬ № ____ |
|||||||
|
технического состояния средств измерения и автоматики |
|||||||
|
№ |
Наименование средства, тип |
Заводской номер |
Заключение о годности |
||||
|
Средства измерений |
|||||||
|
Средства регулирования |
|||||||
|
Ведомость составил: |
|||||||
|
___________________ |
___________________ |
___________________ |
« ___ » _____________ |
||||
|
должность |
подпись |
Ф. И. О. |
дата |
||||
Приложение 7.
|
АО НПО «МОНТАЖАВТОМАТИКА» |
|||||||
|
Наименование объекта: |
|||||||
|
УТВЕРЖДАЮ |
|||||||
|
Главный инженер ЗАКАЗЧИКА |
|||||||
|
____________________ |
|||||||
|
« ___ » _____________ |
|||||||
|
АКТ № ____ |
|||||||
|
проверки монтажа средств измерения и автоматики |
|||||||
|
1 |
Установка отборных и сужающих устройств |
норма |
|||||
|
2 |
Установка первичных преобразователей |
норма |
|||||
|
3 |
Прокладка импульсных линий |
норма |
|||||
|
4 |
Прокладка кабельных линий и электрических проводок |
норма |
|||||
|
5 |
Установка шкафов, щитов и пультов |
норма |
|||||
|
6 |
Прочность крепления аппаратуры |
норма |
|||||
|
7 |
Надежность соединения штепсельных разъемов |
норма |
|||||
|
8 |
Соответствие СИА проекту |
норма |
|||||
|
|
|||||||
|
|
|||||||
|
|
|||||||
|
|
|||||||
|
|
|||||||
|
|
|||||||
|
Представитель заказчика |
|||||||
|
___________________ |
___________________ |
___________________ |
« ___ » _____________ |
||||
|
должность |
подпись |
Ф. И. О. |
дата |
||||
|
Представитель исполнителя |
|||||||
|
___________________ |
___________________ |
___________________ |
« ___ » _____________ |
||||
|
должность |
подпись |
Ф. И. О. |
дата |
||||
Приложение 8.
|
АО НПО «Монтажавтоматика» |
||||||
|
Наименование объекта: |
||||||
|
УТВЕРЖДАЮ |
УТВЕРЖДАЮ |
|||||
|
Главный инженер ЗАКАЗЧИКА |
Главный инженер ИСПОЛНИТЕЛЯ |
|||||
|
____________________ |
____________________ |
|||||
|
« ___ » _____________ |
« ___ » _____________ |
|||||
|
АКТ № ____ |
||||||
|
приемки средств измерений и автоматики в эксплуатацию |
||||||
|
1. Средства измерений и автоматики соответствуют проекту. |
||||||
|
2. Средства измерений и автоматики обеспечивают работу технологического оборудования. |
||||||
|
3. Средства измерений и автоматики передаются в эксплуатацию |
||||||
|
с « ___ » _____________ |
||||||
|
дата |
||||||
|
Приложения: 1. Принципиальные схемы систем измерения и систем автоматизации ____ шт. 2. Ведомость технического состояния средств измерений и автоматики ____ шт. 3. Протоколы проверки петрологических характеристик средств измерений ____ шт. 4. Протоколы проверки статических характеристик датчиков регулируемых параметров ____ шт. 5. Протоколы определения рабочей расходной характеристики регулирующего органа ____ шт. 6. Акт приемо-сдаточных испытаний автоматической системы регулирования ____ шт. |
||||||
|
|
||||||
|
|
||||||
|
Представитель ЗАКАЗЧИКА |
||||||
|
___________________ |
___________________ |
___________________ |
« ___ » _____________ |
|||
|
должность |
подпись |
Ф. И. О. |
дата |
|||
|
Представитель ИСПОЛНИТЕЛЯ |
||||||
|
___________________ |
___________________ |
___________________ |
« ___ » _____________ |
|||
|
должность |
подпись |
Ф. И. О. |
дата |
|||
Приложение 9.
|
АО НПО «Монтажавтоматика» |
||||||||||||
|
Наименование объекта |
||||||||||||
|
ПРОТОКОЛ № ____ |
||||||||||||
|
проверки статических характеристик датчиков (комплектов) регулируемых параметров |
||||||||||||
|
Технические данные датчика (комплекта) |
||||||||||||
|
№ поз. по схеме |
Наименование |
Тип |
Заводской номер |
|||||||||
|
Данные проверки статических характеристик |
||||||||||||
|
Наименование |
Ед. измерения |
Диапазон |
Контрольн. точки |
|||||||||
|
Входной сигнал |
||||||||||||
|
Выходной сигнал |
||||||||||||
|
Крутизна характеристики ____________________________ |
||||||||||||
|
Протокол составил: |
||||||||||||
|
___________________ |
___________________ |
___________________ |
« ___ » _____________ |
|||||||||
|
должность |
подпись |
Ф. И. О. |
дата |
|||||||||
Приложение 10.
|
АО НПО «Монтажавтоматика» |
|||||||||||||
|
Наименование объекта |
|||||||||||||
|
ПРОТОКОЛ № ____ |
|||||||||||||
|
определения рабочей расходной характеристики регулирующего органа |
|||||||||||||
|
Наименование АСР: |
|||||||||||||
|
Технические данные РО |
|||||||||||||
|
Тип: |
Время полного хода |
Перепад давления на РО |
|||||||||||
|
Данные испытаний |
|||||||||||||
|
Положение РО, % УП |
|||||||||||||
|
Величина |
прямой ход |
||||||||||||
|
расхода т/ч |
обратный ход |
||||||||||||
|
Относительная вариация, % |
|||||||||||||
|
Крутизна характеристики _________________________ Люфт ___________________________ |
|||||||||||||
|
Протокол составил: |
|||||||||||||
|
___________________ |
___________________ |
___________________ |
« ___ » _____________ |
||||||||||
|
должность |
подпись |
Ф. И. О. |
дата |
||||||||||
Приложение 11.
|
АО НПО «Монтажавтоматика» |
|||||||||
|
Наименование объекта |
|||||||||
|
УТВЕРЖДАЮ |
УТВЕРЖДАЮ |
||||||||
|
Главный инженер ЗАКАЗЧИКА |
Главный инженер ИСПОЛНИТЕЛЯ |
||||||||
|
____________________ |
____________________ |
||||||||
|
« ___ » _____________ |
« ___ » _____________ |
||||||||
|
АКТ № ____ |
|||||||||
|
приемо-сдаточных испытаний автоматической системы регулирования |
|||||||||
|
Наименование АСР: |
|||||||||
|
Состав АСР |
|||||||||
|
Датчик |
тип |
зав. № |
|||||||
|
Регулятор |
тип |
зав. № |
|||||||
|
Исполнительный механизм |
тип |
зав. № |
|||||||
|
Регулирующий орган |
тип |
зав. № |
|||||||
|
Опенки качества работы АСР |
|||||||||
|
Показатели качество |
Величина |
Оценка |
|||||||
|
Устойчивость (степень затухания) |
норма |
||||||||
|
Динамическое отклонение |
норма |
||||||||
|
Статическое отклонение |
норма |
||||||||
|
Интегральная оценка |
норма |
||||||||
|
Заключение |
|||||||||
|
1. АСР выдержала приемосдаточные испытания. |
|||||||||
|
2. АСР пригодна к эксплуатации |
|||||||||
|
3. По результатам испытании параметры настройки записаны в карту № ___ |
|||||||||
|
Приложение. Протокол № ___ наладки АСР |
|||||||||
|
|
|||||||||
|
|
|||||||||
|
|
|||||||||
|
Представитель ЗАКАЗЧИКА: |
|||||||||
|
___________________ |
___________________ |
___________________ |
« ___ » _____________ |
||||||
|
должность |
подпись |
Ф. И. О. |
дата |
||||||
|
Представитель ИСПОЛНИТЕЛЯ: |
|||||||||
|
___________________ |
___________________ |
___________________ |
« ___ » _____________ |
||||||
|
должность |
подпись |
Ф. И. О. |
дата |
||||||
Приложение 12.
|
АО НПО «Монтажавтоматика» |
||||||
|
Наименование объекта |
||||||
|
ПРОТОКОЛ № ____ |
||||||
|
наладки автоматической системы регулирования |
||||||
|
Наименование АСР: |
||||||
|
Структурная схема АСР |
Краткое описание |
|||||
|
Динамические характеристики объекта |
||||||
|
Результаты наладки: |
||||||
|
Статическая настройка |
ВЫПОЛНЕНО |
|||||
|
Динамическая настройка |
ВЫПОЛНЕНО |
|||||
|
Цена деления задатчика |
||||||
|
Приложение. |
1. Карта № ___ параметров настроек. |
|||||
|
2 Диаграммные ленты _________ шт. |
||||||
|
Заключение. АСР готова к приемо-сдаточным испытаниям |
||||||
|
Наладку произвел: |
||||||
|
___________________ |
___________________ |
___________________ |
« ___ » _____________ |
|||
|
должность |
подпись |
Ф. И. О. |
дата |
|||
Приложение 13.
|
АО НПО «Монтажавтоматика» |
||||||||||||
|
Наименование объекта |
||||||||||||
|
КАРТА № ____ |
||||||||||||
|
параметров настроек функциональных и регулирующих приборов |
||||||||||||
|
Наименование АСР: |
||||||||||||
|
Технические данные прибора |
||||||||||||
|
№ поз. по схеме |
Наименование |
Тип |
Заводской номер |
|||||||||
|
Данные настройки прибора |
||||||||||||
|
Органы настройки |
Дата настройки |
|||||||||||
|
Наименование |
Обозначение |
Единица измерения |
Положение органов настройки |
|||||||||
|
Карту составил: |
||||||||||||
|
___________________ |
___________________ |
___________________ |
« ___ » _____________ |
|||||||||
|
должность |
подпись |
Ф. И. О. |
дата |
|||||||||
Приложение 14.
|
АО НПО «Монтажавтоматика» |
|||
|
Наименование объекта |
|||
|
УТВЕРЖДАЮ |
|||
|
Главный инженер ЗАКАЗЧИКА |
|||
|
____________________ |
|||
|
« ___ » _____________ |
|||
|
Техническое задание |
|||
|
на разработку компьютерного тренажера |
|||
|
1. ИСПОЛНИТЕЛЬ - Ивановский государственный энергетический университет |
|||
|
2. Срок разработки с « ___ » _______________ по « ___ » _______________ |
|||
|
3. Автоматические системы регулирования. |
|||
|
АСР питания___________________________________________________________________________ |
|||
|
АСР топлива___________________________________________________________________________ |
|||
|
АСР соотношения газ – воздух_____________________________________________________________ |
|||
|
АСР разрежения_________________________________________________________________________ |
|||
|
4. Технические средства автоматизации |
|||
|
Каскад 2.______________________________________________________________________________ |
|||
|
Контур 2.______________________________________________________________________________ |
|||
|
АКЭСР 2.______________________________________________________________________________ |
|||
|
______________________________________________________________________________________ |
|||
|
5. Стоимость тренажера определяется протоколом о договорной цене |
|||
|
6. ЗАКАЗЧИК передает ИСПОЛНИТЕЛЮ |
|||
|
- принципиальные схемы АСР |
|||
|
- режимную карту оборудования |
|||
|
- статические характеристики датчиков регулируемых параметров |
|||
|
- расходные характеристики регулирующих органов |
|||
|
- перечень и уставки срабатывания технологических защит |
|||
|
7. Адреса и реквизиты сторон |
|||
|
ЗАКАЗЧИК |
ИСПОЛНИТЕЛЬ |
||
|
ИГЭУ 1535-10 Иваново, ул. Рабфаковская, 34 Кор счет 161300 Р/с 609633 и Комбанке Текстиль а и б 153454 г. Иваново МФО 123083 |
|||
|
Представитель ЗАКАЗЧИКА: |
Представитель ИСПОЛНИТЕЛЯ: |
||
|
_____________________________ |
_____________________________ |
||
|
« ___ » _______________________ |
« ___ » _______________________ |
||
СОДЕРЖАНИЕ
|
2. Подготовительные работы.. 2 5. Наладка автоматических систем регулирования. 5 7. Использованная и рекомендуемая нормативно-техническая документация и литература. 17 |