СИСТЕМЫ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ,
ПРОЕКТИРУЕМЫЕ НА БАЗЕ МИКРОПРОЦЕССОРНЫХ
ПРИБОРОВ
Пособие по применению регулирующего
программируемого микропроцессорного
прибора ПРОТАР
РМ 4-248-92
ГОСУДАРСТВЕННЫЙ ПРОЕКТНЫЙ И
КОНСТРУКТОРСКИЙ ИНСТИТУТ
«ПРОЕКТМОНТАЖАВТОМАТИКА»
1992
|
СИСТЕМЫ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ, Пособие по применению регулирующего программируемого
|
РМ 4-248-92 |
Дата введения 1 сентября 92 г.
Настоящее пособие составлено на базе регулирующих микропроцессорных приборов ПРОТАР 100 и ПРОТАР 110, выпускаемых заводом МЗТА.
Пособие содержит описание основных технических характеристик и принципов работы этих микропроцессорных приборов.
В нем также отражены основные правила реализации автоматических систем регулирования при использовании ПРОТАРов и разработки необходимой проектной документации.
Пособие предназначено для применения инженерно-техническими работниками проектных, монтажных и наладочных организаций.
1. ОБЩИЕ СВЕДЕНИЯ
Регулирующий программируемый микропроцессорный прибор ПРОТАР - универсальное многофункциональное устройство, не требующее проектной компоновки. Прибор применяется в системах автоматического регулирования и решает те же задачи, что и аналоговые приборы системы РПИБ, РП-2, РП-4М1, «Контур», «Каскад-2».
ПРОТАР - многофункциональное устройство, заменяющее 4 - 6 (в различных сочетаниях) приборов комплекса «Каскад-2». Алгоритмические возможности ПРОТАРА шире, чем у аналоговых приборов. Прибор может использоваться в системах стабилизации технологических параметров, программного, каскадного, многосвязного регулирования с реализацией сложных алгоритмов обработки информации.
Для обслуживания приборов ПРОТАР не нужен программист.
Приборы ПРОТАР можно использовать в свободно программируемом режиме и в жестком режиме, сформированном заводом-изготовителем, в котором решаются наиболее распространенные задачи, решаемые блоками комплекса «КАСКАД-2».
Приборы ПРОТАР работают в комплекте с серийно выпускаемыми датчиками с выходными сигналами постоянного тока или напряжения. Управляет прибор исполнительным устройством (импульсным или аналоговым сигналом).
Прибор ПРОТАР с помощью дискретных (логических) сигналов связан с другими устройствами системы автоматического управления.
Приборы имеют средства самодиагностики неисправностей, что исключает недопустимые последствия отказа и облегчает поиск неисправностей.
2. КРАТКАЯ ХАРАКТЕРИСТИКА ПРИБОРА ПРОТАР
Прибор ПРОТАР имеет два исполнения: ПРОТАР 100 - с встроенным пультом оператора, и ПРОТАР 110 - с выносным пультом оператора типа ПО-01. Модификации приборов приведены в табл. 1.
Таблица 1
|
Вид пульта оператора |
Наличие выносного пульта в комплекте поставки |
Код ОКП |
|
|
ПРОТАР 100 |
Встроенный |
- |
42 1841 3251 |
|
ПРОТАР 110 |
Выносной |
имеется |
42 1841 3264 |
|
отсутствует |
42 1841 3265 |
Перечень функций, выполняемых прибором ПРОТАР, приведен в табл. 2, 3 и 4.
В табл. 2 приведены функции, не требующие программирования структуры и функции, реализуемые путем свободного программирования.
В табл. 3 и 4 приведены функции, используемые при программировании структуры. В табл. 3 приведены функции, используемые однократно, а в табл. 4 - многократно.
Количество шагов программы при просмотре и наборе структуры составляет 100 (от шага 00 до 99).
Питание прибора осуществляется от однофазной сети переменного тока напряжением 220 В, 50 Гц.
Потребляемая мощность не более 15 ВА.
Для хранения записанных программ и параметров (при отключении от сети) прибор имеет встроенный резервный источник питания.
Таблица 2
|
Функции, реализованные аппаратно-программными средствами |
Функции, реализуемые путем свободного программирования |
|
|
|
Гальваническое разделение четырех аналоговых входных сигналов (XА, Xb, Xс, Xd) Гальваническое разделение двух дискретных входных сигналов (q+ и q-) Введение дискретного сигнала запрета qо и блокировки от противоречивых команд управления по импульсному выходу zБ, zM Формирование сигнала опорного напряжения для питания потенциометрических датчиков и задатчиков (vоп) Формирование импульсных выходных сигналов zБ, zM и дискретных выходных сигналов zВ, zН, zотк Формирование импульсных сигналов zБ1, zM1 для каскадной и динамической связи между контурами регулирования Формирование дискретного выходного сигнала дистанционного переключателя режима управления z (ПРОТАР 100) или дискретных выходных сигналов встроенных реле z1, z2 (ПРОТАР 110) |
Безударное переключение режимов управления с автоматического на ручное и обратно, ручное управление с помощью пульта оператора Безударное переключение режимов управления с автоматического на ручное и обратно, ручное управление с помощью дискретных сигналов, поступающих с верхнего уровня управления Цифровая индикация входных и выходных аналоговых сигналов, параметров настройки и переменных, входящих в структуру прибора, кода отказа Введение задания с помощью пульта оператора Введение задания с помощью дискретных сигналов, поступающих с верхнего уровня управления Формирование алгоритма диагностики отказов (выход zотк и цифровая индикация кода отказа) Формирование алгоритма жесткой структуры, включающего один из видов регулирования: ПИД, ПИ, ПД, П импульсное или аналоговое, двухпозиционное, трехпозиционное; интегрирование в цепи формирования задания; сигнализацию предельных рассогласований верхнего и нижнего уровня; введение статической или динамической балансировки Автоматическое переключение жесткой структуры на свободно программируемую и обратно с помощью дискретного сигнала qS Формирование внутреннего дискретного сигнала установленного режима управления qР |
Вычисление сигналов рассогласования, задания, входных сигналов программных блоков по введенным в структуру алгоритмам как функции аналоговых и дискретных входных сигналов Селектирование, переключение и отключение сигналов Введение в алгоритмы регулирования дополнительных статических и динамических, линейных и нелинейных звеньев Автоматическое изменение параметров настройки по введенным в структуру алгоритмам вычислений Формирование сигнала программного задатчика Программное регулирование Введение дополнительного канала регулирования Каскадное регулирование в одном приборе Формирование сигнала аварийной сигнализации отказа по введенному в программу алгоритму вычислений Автоматическая перестройка выполняемой структуры |
|
|
Светодиодная индикация установленного режима управления, функционирования импульсных выходов zБ, zМ и дискретных выходов zВ, zН |
|
Таблица 3
|
Основное назначение |
|
|
F00 |
Ввод-вывод информации. Измерение средней за цикл величины дискретных сигналов по входам q+, q- и по входам qБ, qМ. Трехпозиционное широтно-импульсное преобразование с регулируемой длительностью импульсов (выход zБ, zМ). Компарирование сигналов с регулируемой зоной возврата по двум каналам (выходы zВ, zН). Фиксация конца программы. |
|
F01 |
Регулирование ПИД, ПИ, ПД, П импульсное (управление через выходы zБ, zМ интегрирующим исполнительным механизмом). |
|
F02 |
Регулирование ПИД, ПИ, ПД, П аналоговое (выход У). |
|
F10 |
Интегрирование в цепи формирования сигнала задания. |
|
F11 |
Интегрирование с фиксированной постоянной времени и управлением дискретными сигналами qР, qБ, qМ |
|
F12 |
Интегрирование с регулируемой постоянной времени и управлением дискретными сигналами q+ и q- |
|
F13 |
Кусочно-линейное преобразование |
|
F14 |
Двухпозиционное широтно-импульсное преобразование (выход zВ) |
|
F15 |
Трехпозиционное широтно-импульсное преобразование (выходы zВ, zН) |
|
F16 |
Масштабирование и демпфирование сигнала А |
|
F17 |
Масштабирование и демпфирование сигнала b |
|
F18 |
Масштабирование и демпфирование, выборка-хранение (стробирование) сигнала С |
|
F19 |
Дифференцирование и масштабирование сигнала d |
Таблица 4
|
Назначение |
|
|
F20 |
Исключение операции |
|
F21 |
Инвертирование |
|
F22 |
Выделение модуля |
|
F23 |
Извлечение корня квадратного |
|
F24 |
Выделение знака числа |
|
F25 |
Сложение |
|
F25 |
Вычитание |
|
F27 |
Умножение |
|
F28 |
Деление |
|
F30 |
Двухпозиционное преобразование |
|
F31 |
Выделение положительных значений разности |
|
F32 |
Ограничение по минимуму. Выделение максимума |
|
F33 |
Ограничение по максимуму. Выделение минимума |
|
F34 |
Переключение при изменении сигнала qС |
|
F35 |
Переключение при изменении сигнала вида управления |
|
F36 |
Переключение при изменении сигнала qM |
|
F37 |
Переключение при изменении сигнала qБ |
|
F38 |
Переключение при изменении сигнала q- |
|
F39 |
Переключение при изменении сигнала q+ |
|
F40 |
Вызов переменной для последующего вычисления |
|
F41 |
Пересылка и запоминание результата предыдущего вычисления |
|
F46 |
Апериодическое преобразование с управлением сигналом qР |
|
F47 |
Апериодическое преобразование |
|
F48 |
Дифференцирование с управлением сигналом qР |
|
F49 |
Дифференцирование |
ВХОДНЫЕ СИГНАЛЫ
Аналоговые входные сигналы приведены в табл. 5
Таблица 5
|
Диапазон изменения |
Способ подключения |
Входное сопротивление, Ом |
Примечания |
|
|
|
по выбору: |
1. Сигналы гальванически изолированы друг от друга и от других цепей. 2. Резистивные шунты ВТ и делители ВН прилагаются к прибору |
||
|
0 - 5 мА |
через ВТ05/2 |
400 |
||
|
|
через ВТ20/2 |
100 |
||
|
0 - 10 В |
через ВН10/2 |
2×104 |
||
|
0 - 2 В |
непосредственно |
³ 105 |
||
|
Хе |
0 - 10 В |
непосредственно |
³ 105 |
|
|
Хh |
0 - 1 В |
непосредственно |
³ 105 |
Дискретные (логические) входные сигналы приведены в табл. 5.
Таблица 6
|
Обозначение |
Назначение |
Примечания |
|
qБ |
Вычисление qI |
q1 - средняя за цикл величина разности qБ - qМ; диапазон изменения от -1 до 1; дискретность 1/32 |
|
qМ |
Управление интегратором в ручном режиме (F02, F11) Переключение при изменении qБ (F37) и qМ (F36) |
|
|
q+ |
Вычисление qII |
Сигналы изолированы гальванически от остальных цепей |
|
q- |
Управление интегратором 11 (F10) и (F12) Переключение при изменении q+ (F39) и q- (F38) |
q11 - средняя за цикл величина разности q+ и q-, диапазон изменения от -1 до 1; дискретность 1/32 |
|
qС |
Переключение при изменении qС (F34) Стробирование (выборка-хранение) сигнала (F18) |
|
|
qS |
Установка жесткой структуры при qS = 1 и свободно программируемой при qS = 0 |
|
|
qD qÑ |
Дистанционное управление нагрузкой выходов zБ и zМ в ручном режиме (для ПРОТАР 110 воздействие формируется только при отключенном пульте оператора) |
Аналогичное воздействие осуществляется кнопками «D» и «Ñ» пульта оператора |
|
qО |
Введение запрета управления нагрузкой по выходам zБ; zМ; zБ1; zМ1 при qo = 0 |
Запрет формируется аппаратными средствами |
|
qРУ (ПРОТАР 100) |
Установка после кратковременного воздействия сигнала qРУ = 1 (qАУ = 1) ручного (автоматического) режима управления через встроенный дистанционный переключатель |
Аналогичная установка
осуществляется кнопками « |
|
qВН (ПРОТАР 110) |
Установка при отключенном пульте оператора режима управления: ручного при qВН = 1; автоматического при qВН = 0 Управление индикаторами прибора «|⊲» (qВН = 0); «|⊳» (qВН = 1) |
При подключенном пульте
оператора установка режима управления осуществляется кнопками « |
|
qР (внутренний сигнал) |
Сигнал режима управления для F01; F02; F11; F46; F48; F00 Переключение при изменении qР (F35) |
, При автоматическом режиме управления qР = 0, при ручном qР = 1 |
ВЫХОДНЫЕ СИСТЕМЫ
Выходные сигналы приведены в табл. 7.
Таблица 7
|
Вид сигнала |
Параметры |
|
|
zБ |
Импульсный сигнал трехпозиционного широтно-импульсного модулятора (ШИМ) |
По выбору: постоянный пульсирующий ток 0; 24 В, активная составляющая нагрузки ³ 160 Ом; |
|
zM |
То же для управления исполнительным механизмом (F01) |
изменение состояния бесконтактного ключа (лог. «0» - ключ разомкнут, лог. «1» - ключ замкнут), коммутирующая способность 45 В; 0,15 А; в автоматическом режиме светодиодная индикация сигналов |
|
zБ1 zM1 |
Импульсный сигнал трехпозиционного ШИМ для динамической связи между приборами: zБ1 = zБ; zM1 = zM при qP = 0 zБ1 = zM1 = 0 при qP = 1 |
Изменение состояния бесконтактного ключа (лог. «0» - ключ разомкнут, лог. «1» - ключ замкнут), коммутирующая способность 45 В; 0,05 А |
|
zВ zН |
Дискретные сигналы двух цифро-дискретных компараторов Импульсные сигналы ШИМ: двухпозиционного zВ (F14) и трехпозиционного zВ, zН (F15) |
Те же, что для сигналов zБ; zM. Светодиодная индикация сигналов |
|
zотк |
Дискретный сигнал отказа с одновременным отображением на дисплее пульта оператора кода отказа Дискретный сигнал аварийной сигнализации по введенному в программу алгоритму вычислений при (Го < 0) |
Те же, что для сигналов zБ; zM. При нормальной работе ключ замкнут, при отказе ключ размыкается. Светодиодная индикация отказа (ПРОТАР 110) |
|
z (ПРОТАР 100) |
Дискретный сигнал встроенного дистанционного переключателя режима управления (автоматическое - ручное) |
Гальванически изолированная группа контактов реле на переключение постоянного тока 0,08 - 0,25 А; 5 - 35 В на активной нагрузке |
|
z1 z2 (ПРОТАР 110 |
Дискретные сигналы двух встроенных реле. Каждое реле может быть соединено с одним из выходов zБ; zM; zБ1; zМ1; zВ; zН; zотк через внутренний источник 24 В |
Для каждого реле гальванически изолированная группа контактов на переключение постоянного или переменного (50 - 1100 Гц) тока 5×10-6 -0,5 А; 0,05 - 36 В на активной нагрузке |
|
Vоп |
Опорное напряжение постоянного тока |
Vоп = 10,3 ± 0,1 В, сопротивление нагрузки ³ 2 кОм |
|
У |
Аналоговый сигнал постоянного тока: Результат вычислений по введенному в программу алгоритму Выходной сигнал алгоритма регулирования (F02) |
Диапазон изменения 0 - 10 В; сопротивление нагрузки ³ 2 кОм |
Примечания:
1. Гальваническая изоляция выходных цепей не предусматривается (кроме групп контактов реле).
2. Активная составляющая сопротивления суммарной нагрузки на сигналы 0; 24 В не менее 160 Ом.
Перечень переменных, условное обозначение переменных на цифровом дисплее приведены в табл. 8.
Таблица 8
|
Назначение |
Размерность |
Диапазон изменения |
Применяется в функциях |
Исходное значение при проверке |
|||
|
основное |
в жесткой структуре |
мин |
макс |
||||
|
u |
Программируемая переменная |
|
% |
-102,4 |
102,4 |
F13 |
|
|
A |
Вход ХA |
% |
-2,4 |
102,4 |
F16 |
||
|
|
Вход Хb |
% |
-2,4 |
102,4 |
F17 |
||
|
|
Вход Хс |
% |
-2,4 |
102,4 |
F18 |
||
|
|
Вход Хd |
% |
-2,4 |
102,4 |
F19 |
||
|
|
Вход Хe |
% |
-2,4 |
102,4 |
|||
|
|
Вход Хh |
% |
-2,4 |
102,4 |
|||
|
|
Выход У |
% |
-2,4 |
102,4 |
F02 |
||
|
I |
Вход (qБ) + (qМ) |
- |
-1 |
1 |
F02 F11 |
Обозначение в схемах q¢ |
|
|
II |
Вход (q+) + (q-) |
- |
-1 |
1 |
F10 F12 |
Обозначение в схемах q² |
|
|
|
Рассогласование |
% |
-102,4 |
102,4 |
F01 F02 |
||
|
|
Программируемый коэффициент |
- |
- |
-127,9 |
-127,9 |
0,000 |
|
|
|
-²- |
коэффициент при ХA |
- |
-10 |
10 |
F16 |
-1,000 |
|
|
-²- |
коэффициент при Хb |
- |
-10 |
10 |
F17 |
2,000 |
|
|
-²- |
коэффициент при Хс |
- |
-10 |
10 |
F18 |
-1,000 |
|
|
-²- |
коэффициент при Хd |
- |
-10 |
10 |
F19 |
-1,000 |
|
|
-²- |
коэффициент при Хе |
- |
-10 |
10 |
1,000 |
|
|
|
|
- |
-10 |
10 |
0,000 |
||
|
|
|
- |
-10 |
10 |
0,000 |
||
|
|
Программируемая переменная |
u1 = h при u = 0 % |
% |
-655 |
655,3 |
20,00 |
|
|
|
u2 = h при u = 0 % |
% |
-655 |
655,3 |
80,00 |
||
|
|
Исходное задание |
Ро = У11 |
% |
-102,4 |
102,4 |
F01 F02 F10 |
50,00 |
|
|
Оперативное задание |
% |
-102,4 |
102,4 |
F01 F02 |
0,000 |
|
|
|
Предел оперативного задания |
% |
0 |
102,4 |
F01 F02 |
10,00 |
|
|
|
Задание |
% |
-102,4 |
102,4 |
F01 F02 |
||
|
Р |
Эквивалентный параметр |
% |
-655 |
655,3 |
F01 F02 |
50,00 |
|
|
|
Постоянная времени фильтра параметра |
с |
0 |
9999 |
F01 F02 |
0,000 |
|
|
|
Постоянная компенсации динамической балансировки |
с |
0 |
9999 |
F01 F02 |
1000 |
|
|
|
Зона нечувствительности |
% |
0 |
102,4 |
F01 F02 |
2,000 |
|
|
|
Коэффициент пропорциональности |
- |
-127,9 |
127,9 |
F01 F02 |
1,000 |
|
|
|
Постоянная интегрирования |
с |
0 |
9999 |
F01 F02 |
0,000 |
|
|
|
Постоянная дифференцирования |
с |
0 |
9999 |
F01 F02 |
6,400 |
|
|
|
Коэффициент дифференцирования |
- |
0 |
10 |
F01 F02 |
0,500 |
|
|
|
Вход ШИМ |
% |
-102,4 |
102,4 |
F00 F01 |
||
|
|
Выход сумматора ШИМ |
% |
-102,4 |
102,4 |
F00 F01 |
||
|
|
Длительность импульса |
с |
0,1 |
2,54 |
F00 F01 |
0,200 |
|
|
|
Вход неинвертируемый компаратора 1 |
|
% |
-655 |
655,3 |
F00 F14 F15 |
|
|
|
Вход инвертируемый компаратора 1 |
Верхнее предельное отклонение |
% |
-655 |
655,3 |
F00 F14 F15 |
|
|
|
Зона возврата компаратора 1 |
% |
0 |
102,4 |
F00 F14 F15 |
0,020 |
|
|
|
Вход неинвертируемый компаратора 2 |
Нижнее предельное отклонение |
% |
-655 |
655,3 |
F00 F15 |
-10,00 |
|
|
Вход инвертируемый компаратора 2 |
|
% |
-655 |
655,3 |
F00 F15 |
0,000 |
|
|
Зона возврата компаратора 2 |
% |
0 |
102,4 |
F00 F15 |
0,020 |
|
|
|
Параметр отказа |
Е.01 при Го = П00-(П01) |
% |
-655 |
655,3 |
F00 |
655,3 |
|
|
Вход ЦАП |
% |
0 |
102,4 |
F00 F02 |
0,000 |
|
|
|
Ограничение минимальное интегратора 1 |
% |
-655 |
655,3 |
F11 F02 |
0,000 |
|
|
|
Ограничение максимальное интегратора 1 |
% |
-655 |
655,3 |
F11 F02 |
100,0 |
|
|
|
Выход интегратора 1 |
У1 = У |
% |
-655 |
655,3 |
F02 |
0,000 |
|
|
Постоянная времени интегратора 2 |
Постоянная инт. задания |
с |
0 |
9999 |
F10 F12 |
111,0 |
|
|
Выход интегратора 2 |
|
% |
-655 |
655,3 |
F10 F12 |
|
|
|
Программируемая переменная |
- |
% |
-655 |
655,3 |
F13 |
10,00 |
|
|
Постоянная времени |
Постоянная фильтра ХА |
с |
0 |
9999 |
F16 |
0,000 |
|
|
-²- |
Постоянная фильтра Хb |
с |
0 |
9999 |
F17 |
0,000 |
|
|
-²- |
Постоянная фильтра ХС |
с |
0 |
9999 |
F18 |
16,00 |
|
|
-²- |
Постоянная фильтра Xd |
с |
0 |
9999 |
F19 |
16,00 |
|
|
-²- |
- |
с |
0 |
9999 |
0,000 |
|
|
|
-²- |
- |
с |
0 |
9999 |
0,000 |
|
|
|
-²- |
- |
с |
0 |
9999 |
0,000 |
|
|
|
-²- |
- |
с |
0 |
9999 |
0,000 |
|
|
|
Программируемая переменная |
Параметр настройки Е.01 |
% |
-655 |
655,3 |
655,3 |
|
|
|
-²- |
f (qБ; qМ; qР) |
% |
-655 |
F13 |
0,000 |
|
|
|
-²- |
0,32 (0) |
% |
-655 |
655,3 |
F13 |
0,32 |
|
|
-²- |
- |
% |
-655 |
655,3 |
F13 |
См. примечание 1 |
|
|
-²- |
- |
% |
-655 |
655,3 |
F13 |
-²- |
|
|
-²- |
- |
% |
-655 |
655,3 |
F13 |
-²- |
|
|
-²- |
П06 = u2 - u1 |
% |
-655 |
655,3 |
-²- |
|
|
|
-²- |
П07 - Вход инт. задания |
% |
-655 |
655,3 |
F10 |
100,0 |
|
|
-²- |
П08 - Ра мин |
% |
-655 |
655,3 |
F10 |
-100,0 |
|
|
-²- |
П09 - Ра макс |
% |
-655 |
655,3 |
F10 |
100,0 |
|
|
-²- |
- |
% |
-655 |
655,3 |
F13 |
См. примечание 1 |
|
|
-²- |
- |
% |
-655 |
655,3 |
F13 |
-²- |
|
|
-²- |
- |
% |
-655 |
655,3 |
F13 |
-²- |
|
|
-²- |
- |
% |
-655 |
655,3 |
F13 |
-²- |
|
|
-²- |
- |
% |
-655 |
655,3 |
F13 |
-²- |
|
|
-²- |
- |
% |
-655 |
655,3 |
F13 |
-²- |
|
|
-²- |
f (A) |
% |
-655 |
655,3 |
F16 |
-²- |
|
|
-²- |
f (b) |
% |
-655 |
655,3 |
F17 |
-²- |
|
|
-²- |
f (c) |
% |
-655 |
655,3 |
F18 |
-²- |
|
|
-²- |
f (d) |
% |
-655 |
655,3 |
F19 |
-²- |
Примечания:
1. Устанавливается любая величина в пределах диапазона изменения данной переменной.
2. Диапазон изменения переменных A, b, c, d, e, h, y индицируемый на дисплее не менее (0 ... 100) %.
3. В режимах просмотра структуры («ПС») и набора структуры («НС») в перечень включаются константы: 0,000 % - символ 20
100,0 % - символ 21
4. Дискретность установки (без учета разрешающей способности дисплея):
для размерности «%» ... 0,02;
для безразмерных величин ... 1/256;
для размерности «с» ... 0,02 - для параметра;
0,32 - для остальных параметров.
Режимы работы цифрового дисплея на пульте оператора прибора приведены на черт. 1 и 2.
Цифровой дисплей имеет 3 разрядов. Распределение разрядов для индикации символов и переменных в различных режимах видно из чертежей.
РЕЖИМЫ РАБОТЫ ЦИФРОВОГО ДИСПЛЕЯ. ОРГАНЫ НАСТРОЙКИ И УПРАВЛЕНИЯ
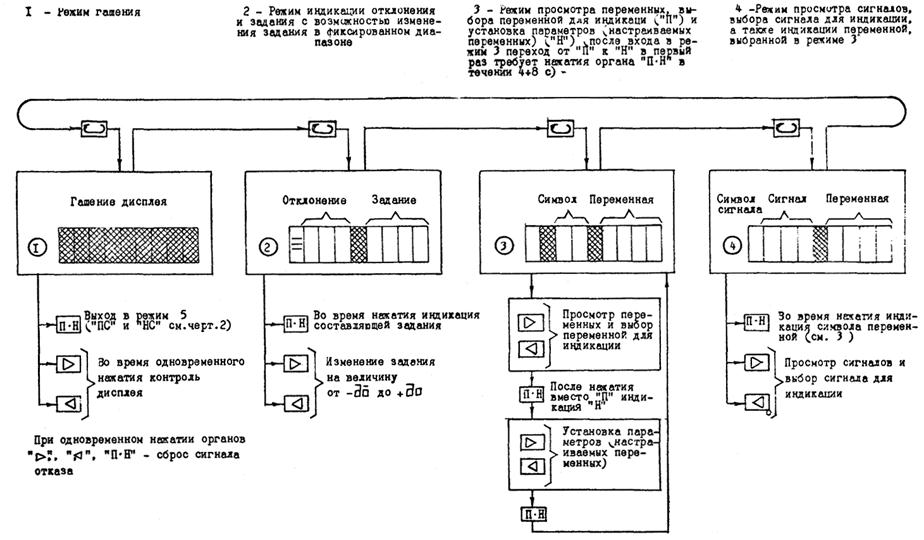
Черт. 1
РЕЖИМ ПРОСМОТРА СТРУКТУРЫ («ПС») И НАБОРА СТРУКТУРЫ («НС»)
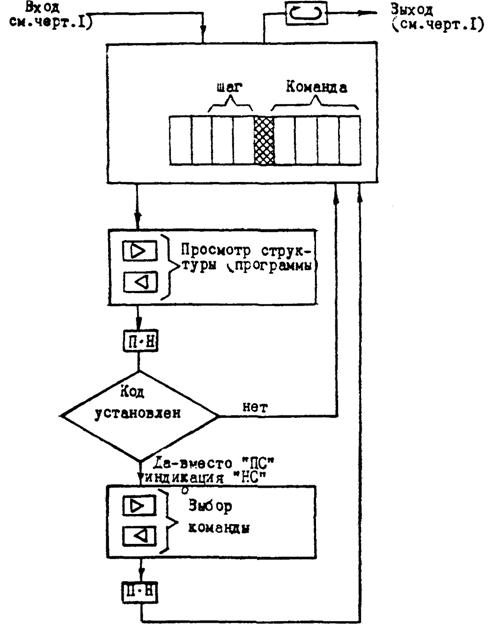
Черт. 2
Примечание. Код, разрешающий набор структуры, устанавливается в режиме «ПС» путем установки шага «99» и последующего нажатия органа «П-Н» в течении 4 ¸ 8 с.
3. КОНСТРУКЦИЯ ПРИБОРОВ ПРОТАР 100 И ПРОТАР 110
Элементы прибора объединены в блок, который заключен в металлический корпус, рассчитанный на щитовой утопленный монтаж на вертикальной плоскости. Габаритные и установочные размеры приборов ПРОТАР 100 и ПРОТАР 110 приведены соответственно на черт. 3 и 4.
В комплект приборов входят устройства для подключения входных сигналов:
ВТ 05/2 для сигнала 0 - 5 мА,
ВТ 20/2 - 0 - 20 и 4 - 20 мА,
ВН 10/2 - 0 - 10 В
Эти устройства преобразуют входной сигнал в сигнал 0 - 2 В, а для сигнала 4 - 20 мА - 04 - 2 В.
В комплект прибора ПРОТАР 110 (при необходимости, что оговаривается при заказе) входит выносной пульт оператора ПО-01, который подключается к прибору гибким плоским жгутом, оканчивающимся вилкой соединителя.
Блок прибора состоит из:
шасси, где находятся модуль источника питания МЕ11 и функциональные модули: аналоговый типа МА11, буферный типа МВ11 (для ПРОТАР 100) или МВ12 (для ПРОТАР 110), цифровой типа МС11;
передней панели, где находится модуль дисплейный типа МД11 (для ПРОТАР 100) и типа МД12 (для ПРОТАР 110), который имеет розетку соединителя для подключения пульта оператора типа ПО-01;
задней панели, где находятся: соединитель на 50 клемм для внешних соединений прибора; модуль резервного питания типа МР01 и винт «Земля».
Передняя панель прибора ПРОТАР
100 приведена на черт. 5. На
передней панели расположен 8-разрядный цифровой индикатор. Для переключения
режимов работы дисплея, просмотра и настройки переменных, просмотра и
программирования структуры прибора служат кнопки: «П×Н», «![]() », «
», «![]() », «
», «![]() ».
Для переключения режимов управления и для ручного управления случат кнопки: «
».
Для переключения режимов управления и для ручного управления случат кнопки: «![]() »,
«
»,
«![]() », «
», «![]() », «
», «![]() ».
Для работы дискретных и импульсных выходов zB, zН, zБ и zМ соответствуют светодиодные индикаторы: «
».
Для работы дискретных и импульсных выходов zB, zН, zБ и zМ соответствуют светодиодные индикаторы: «![]() »,
«
»,
«![]() », «
», «![]() », «
», «![]() ».
».
ГАБАРИТНЫЕ И УСТАНОВОЧНЫЕ РАЗМЕРЫ ПРИБОРА ПРОТАР 100
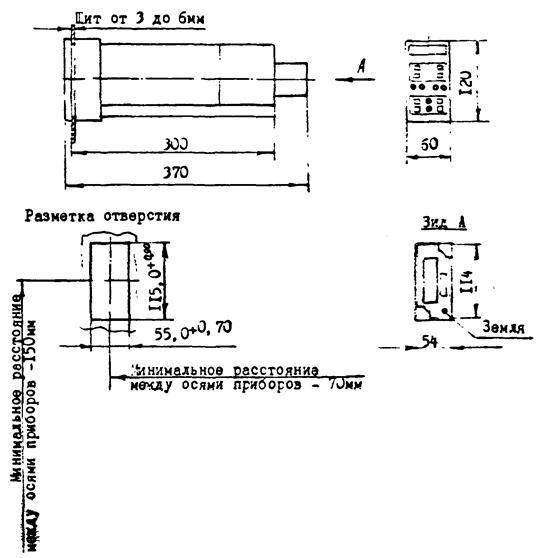
Черт. 3
ГАБАРИТНЫЕ И УСТАНОВОЧНЫЕ РАЗМЕРЫ ПРИБОРА ПРОТАР 110
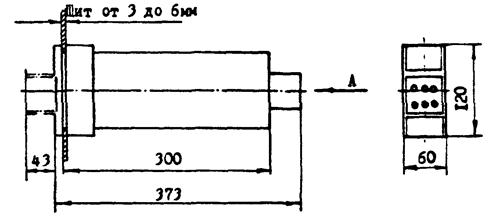
Разметка отверстия
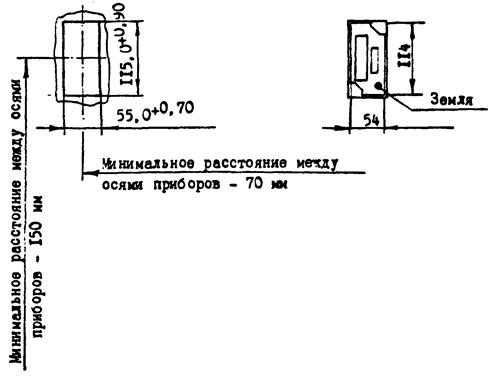
Черт. 4
|
ПЕРЕДНЯЯ ПАНЕЛЬ ПРИБОРА ПРОТАР 100 |
ПЕРЕДНЯЯ ПАНЕЛЬ ПРИБОРА ПРОТАР 110 |
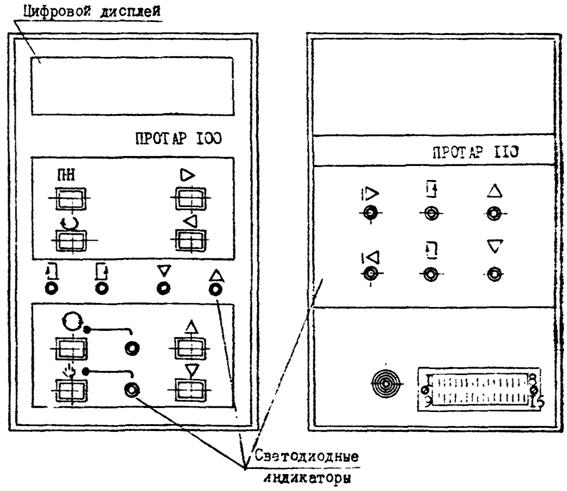
Черт. 5 Черт. 6
Установленный режим управления показывают светодиодные
индикаторы «![]() », «
», «![]() ».
».
Передняя панель прибора ПРОТАР
110 приведена на черт. 6. На
передней панели находятся светодиодные индикаторы: «![]() », «
», «![]() »,
«
»,
«![]() », «
», «![]() ». Назначение
их совпадает с аналогичными индикаторами прибора ПРОТАР 100; светодиодные
индикаторы режима управления «
». Назначение
их совпадает с аналогичными индикаторами прибора ПРОТАР 100; светодиодные
индикаторы режима управления «![]() », «
», «![]() »
соответственно индицируют qвн = 0 и qвн = 1; светодиодный индикатор отказа прибора.
»
соответственно индицируют qвн = 0 и qвн = 1; светодиодный индикатор отказа прибора.
На пульте ПО-01 (черт. 7) расположены:
8-разрядный цифровой дисплей;
кнопки «П×Н», «![]() », «
», «![]() », «
», «![]() »,
«
»,
«![]() », «
», «![]() », «
», «![]() »,
«
»,
«![]() », светодиодные индикаторы «
», светодиодные индикаторы «![]() »,
«
»,
«![]() »
»
- их назначения аналогичны.
ГАБАРИТНЫЕ РАЗМЕРЫ ПУЛЬТА ОПЕРАТОРА ПО-01
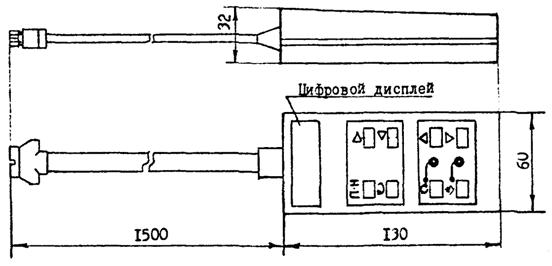
Черт. 7
4. ФУНКЦИОНАЛЬНЫЕ ВОЗМОЖНОСТИ ПРИБОРА ПРОТАР
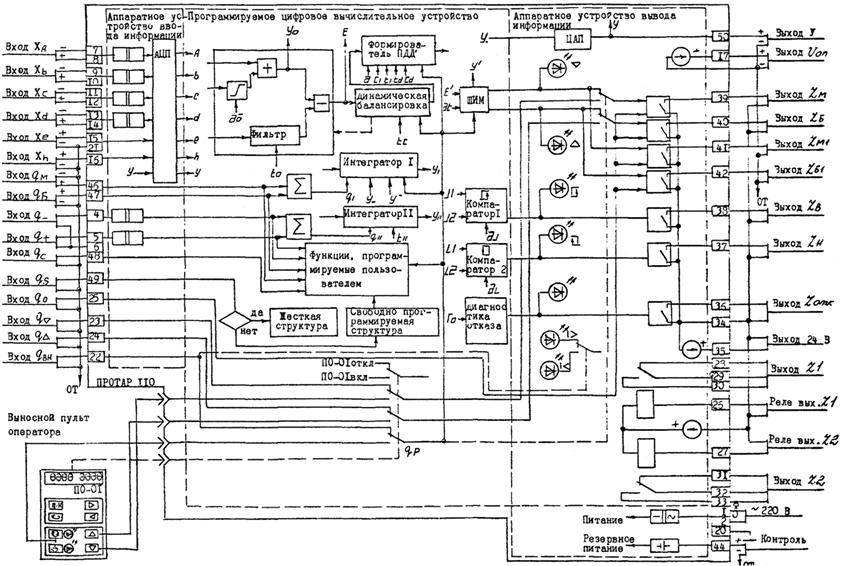
Прибор ПРОТАР 100 содержит аппаратное устройство ввода информации, источники основного и резервного питания, программируемое цифровое вычислительное устройство, встроенный пульт оператора и аппаратное устройство вывода информации.
Аппаратное устройство ввода информации преобразует 6 аналоговых и 11 дискретных (логических) входных сигналов в цифровую двоичную форму.
Входные аналоговые сигналы XА, Xb, Xс, Хd гальванически изолированы друг от друга и от всех остальных цепей, а входные аналоговые сигналы Xе, Хh вводятся без гальванического разделения.
Дискретные (логические) входные сигналы qi преобразуются в электрический двоичный сигнал. Логический «0» - вход разомкнут, логическая «1» - вход замкнут. Дискретные сигналы q+ и q- имеют гальваническую изоляцию от остальных цепей.
Источник основного питания формирует напряжение постоянного тока и питает все узлы прибора.
Источник резервного питания служит для питания цепей оперативного запоминающего устройства, когда отключен источник основного питания. Это обеспечивает сохранность запрограммированной информации. Можно подключать резервное питание внешнее.
Программируемое цифровое вычислительное устройство включает в себя следующие блоки: блок формирования сигналов задания и рассогласования, блок динамической балансировки, блок формирования ПДД1, блок широтно-импульсной модуляции - ШИМ, блоки компараторов 1 и 2, блок диагностики отказа, блок интегратора 1, блок интегратора 11. Все эти блоки показаны на черт. 8.
Дискретный входной сигнал qS осуществляет автоматическое переключение жесткой структуры на свободно программируемую и обратно. Если qS = 0, то осуществляется свободно программируемая структура, а если qS = 1 включается жесткая структура, которая не требует программирования. Вход в режиме программирования не используется.
В режиме свободно программируемой структуры используются функции Fi, приведенные в табл. 3 и 4. Обозначения этих функций в процессе программирования вызываются на дисплей и в пределах отведенных на программирование 100 шагов набирается структура, необходимая для реализации заданного алгоритма управления.
Встроенный пульт оператора содержит цифровой 8-разрядный (2´4) дисплей и 4-е кнопки для управления режимами работы
дисплея, программирования прибора и настройки параметров «П×Н», «![]() », «
», «![]() », «
», «![]() »
и 4-е кнопки, которые служат для переключения режимов управления: «
»
и 4-е кнопки, которые служат для переключения режимов управления: «![]() »
- «автоматическое, «
»
- «автоматическое, «![]() » - «ручное» и для ручного управления
управление выходом zБ - «
» - «ручное» и для ручного управления
управление выходом zБ - «![]() »,
управление выходом zМ - «
»,
управление выходом zМ - «![]() ».
».
Аппаратное устройство вывода информации содержит цифро-аналоговый преобразователь ЦАП, который преобразует цифровой сигнал в аналоговый выходной сигнал У, источник опорного напряжения Vоп, 7 выходных бесконтактных ключей zМ, zБ, zМ1, zБ1, zB, zH, zотк, встроенный источник напряжения постоянного пульсирующего тока 24 В, средства переключения режима управления с автоматического на ручное и обратно, дистанционный переключатель режима управления и контактный дискретный выход z, состояние которого определяет установленный режим управления.
ПРИБОР ПРОТАР 100. ФУНКЦИОНАЛЬНАЯ СХЕМА
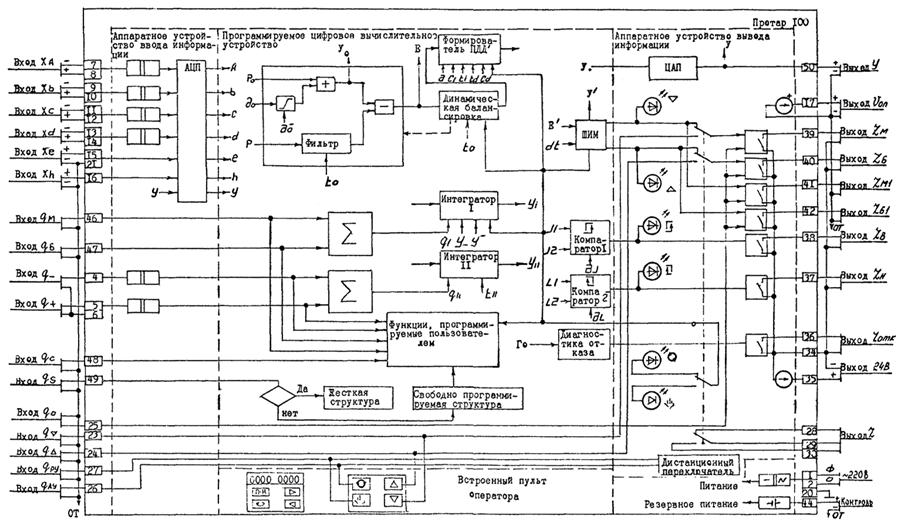
Черт. 8
Ключи zМ, zБ, zМ1, zБ1 предназначены для получения двух импульсных выходов (трехпроводная схема).
Клич zМ, zБ - для управления пусковым устройством исполнительного механизма (реализует импульсное ПИД-регулирование).
Ключ zМ1, zБ1 - работает в режиме «А» (автоматическом) синхронно с ключом zМ, zБ и организует динамическую связь между контурами регулирования. В режиме «Р» (ручном) ключ zМ1 и zБ1 - разомкнут.
Входное сигнал qо (дискретный) запрещает действия прибора по выходам zМ, zБ, zМ1, zБ1 в режимах «А» и «Р».
Ключи zB, zH управляется компараторами, а ключ zотк - программным блоком диагностики отказа.
ПРИБОР ПРОТАР 110 содержит все те же устройства, что и ПРОТАР 100, кроме пульта оператора. ПРОТАР 110 имеет выносной пульт оператора ПО-01, который с помощью соединителя подключается к прибору. Органы управления и контроля выносного пульта, их назначения соответствуют встроенному пульту прибора ПРОТАР 100. Светодиодные индикаторы функционирования выходов zМ, zБ, zB, zH находятся на лицевой панели прибора ПРОТАР 110.
АППАРАТНОЕ УСТРОЙСТВО ВВОДА ИНФОРМАЦИИ имеет
дискретный сигнал zВH, который несет информацию
о режиме управления (от внешнего переключателя управления). На панели прибора
(см. черт. 6)
имеются светодиодные индикаторы «![]() » (автоматическое
управление) и «
» (автоматическое
управление) и «![]() » (внешнее ручное управление), которое
осуществляется сигналами q
» (внешнее ручное управление), которое
осуществляется сигналами q![]() и
q
и
q![]() .
.
Когда подключается пульт ПО-01 внешнее управление отключается и управление осуществляется с пульта.
АППАРАТНОЕ УСТРОЙСТВО ВЫВОДА ИНФОРМАЦИИ не содержит дистанционного переключателя и контактного дискретного выхода, имеющим связь с установленным режимом управления. На лицевой панели имеет светодиодный индикатор отказа. Имеет два реле с одним перекидным контактом каждое. Функциональная схема прибора ПРОТАР 110 приведена на черт. 9.
В остальном функциональная схема схожа с функциональной схемой ПРОТАР 100.
5. ЖЕСТКАЯ СТРУКТУРА
Модификации 100 и 110 имеют возможность без процедуры программирования использовать алгоритм управления. Для этого существует жесткая структура. Дискретный входной сигнал qS осуществляет переключение алгоритма на работу в жесткой структуре.
Если qS = 0, то осуществляется свободно программируемая структура и клемма 49 - свободна или соединяется с клеммой 21 через разомкнутый ключ.
Если qS = 1, то осуществляется жесткая структура и клемма 49 соединена с клеммой 21 перемычкой или через замкнутый ключ.
Функции, которые можно реализовать алгоритмом жесткой структуры, приведены в табл. 2.
Функциональная схема жесткой структуры приведена на черт. 10.
Перечень переменных, обозначение переменных, назначение и диапазоны изменения переменных и параметров настройки в жесткой структуре приведены в табл. 8.
Прибор в режиме жесткой структуры практически используется так же как непрограммируемые приборы. Прибор подключается в соответствии со схемой подключения (черт. 11 - 16) и устанавливаются требуемые величины параметров настройки.
ПРИБОР ПРОТАР 110. ФУНКЦИОНАЛЬНАЯ СХЕМА
Черт. 9
ЖЕСТКАЯ СТРУКТУРА. ФУНКЦИОНАЛЬНАЯ СХЕМА
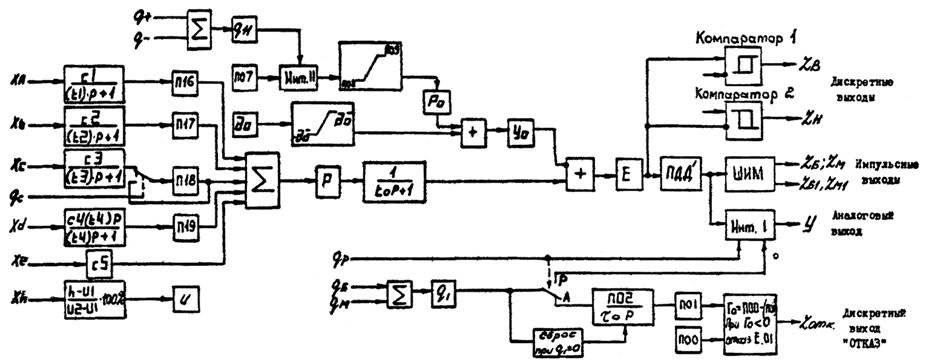
Черт. 10
6. ВНЕШНЕЕ ПОДКЛЮЧЕНИЕ ПРИБОРОВ ПРОТАР 100 И ПРОТАР 110
На черт. 8 и 9 приведены функциональные схемы приборов ПРОТАР 100 и ПРОТАР 110.
Прибор ПРОТАР 100 воспринимает до 6 аналоговых входных сигналов: XА, Хb, Хc, Хd, Хe, Хh. Различные варианты подключения аналоговых сигналов приведены на черт. 11. Аналоговые входы XА, Хb, Хc, Хd гальванически изолированы. Эти входы рассчитаны на подключение аналоговых сигналов 0 - 5, 0 - 20, 4 - 20 мА и 0 - 10 В с помощью устройств ВТ 05/2, ВТ 20/2, ВН 10/2. На вход Xе подается сигнал 0 - 10 В и на вход Хh - 0 - 1 В, которые подаются непосредственно.
На черт. 12 показаны варианты использования входов Хе и Хh для подключения потенциометрического датчика (задатчика) с питанием последнего от встроенного источника опорного напряжения Uоп.
Прибор ПРОТАР 100 воспринимает до 11 дискретных (логических) входных сигналов qi, соответствующих разомкнутому или замкнутому состоянию контактных или бесконтактных ключей. Пример подключения дискретных (логических) входных сигналов приведен на черт. 13.
Входы q- и q+ гальванически изолированы от остальных цепей.
Схемы подключения нагрузок приведены на черт. 14.
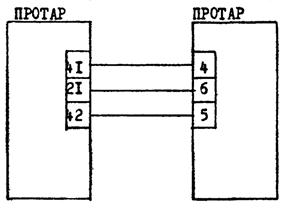
На черт. 15 приведен пример динамической или каскадной связи между двумя регулирующими приборами ПРОТАР.
Прибор ПРОТАР 110 подключается аналогично прибору ПРОТАР 100.
ПОДКЛЮЧЕНИЕ АНАЛОГОВЫХ ВХОДНЫХ СИГНАЛОВ ПОСТОЯННОГО ТОКА
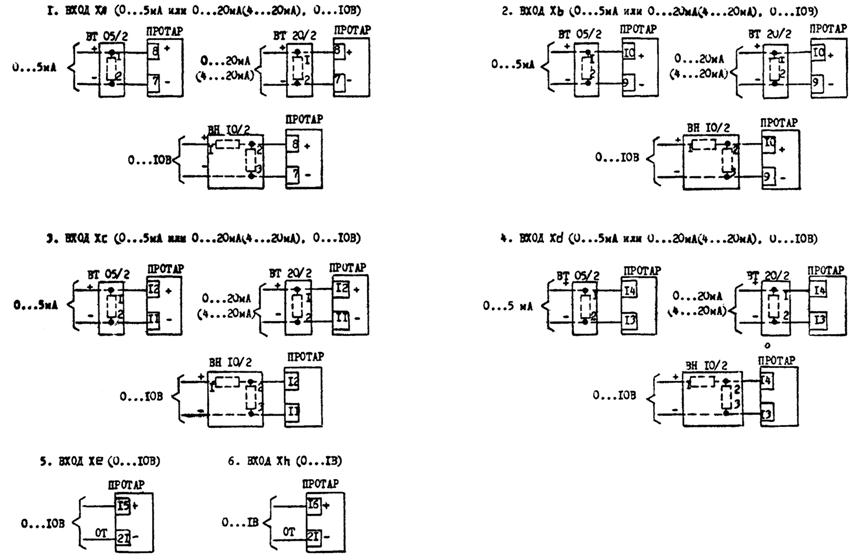
Примечание. Неиспользуемые входы ХА, Хb, Хc, Хd, Хе, Хh закорачиваются.
Черт. 11
ПОДКЛЮЧЕНИЕ ПОТЕНЦИОМЕТРИЧЕСКОГО ДАТЧИКА (ЗАДАТЧИКА)
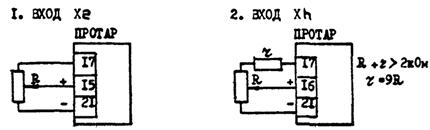
Черт. 12
ПОДКЛЮЧЕНИЕ ДИСКРЕТНЫХ (ЛОГИЧЕСКИХ) ВХОДНЫХ СИГНАЛОВ
ПРОТАР
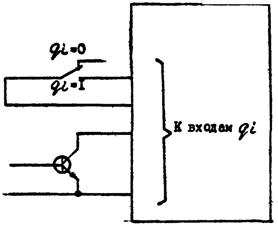
Черт. 13
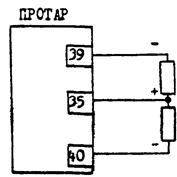
ПОДКЛЮЧЕНИЕ НАГРУЗОК
1. К ИМПУЛЬСНОМУ ВХОДУ zM, zБ
1.1. С ВНУТРЕННИМ ИСТОЧНИКОМ
1.2. С ВНЕШНИМ ИСТОЧНИКОМ
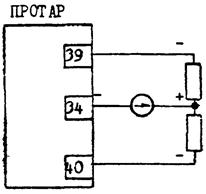
2. К ДИСКРЕТНОМ ВЫХОДАМ zB (zH, zотк)
2.1. С ВНУТРЕННИМ ИСТОЧНИКОМ

2.2. С ВНЕШНИМ ИСТОЧНИКОМ
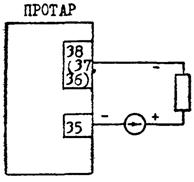
Примечание. Для прибора ПРОТАР 110 подключение реле выхода (z1, z2) к одному из выходов zБ (zM, zM1, zБ1, zB, zH, zотк) производится путем соединения клеммы 26 (27) с клеммой 40 (39, 42, 41, 38, 37, 36). При этом допускается одновременное подключение обоих реле к любому из указанных выходов.
Черт. 14
Отличия: ПРОТАР 110 имеет розетку для подключения выносного пульта ПО-01:
вместо входов qАУ, qРУ имеет вход для дискретного сигнала qвн;
вместо выхода z имеет два контактных дискретных выхода z1, z2 и цепи для коммутации реле этих выходов (см. примечание к черт. 14).
Каждый прибор ПРОТАР имеет модуль резервного питания МР01, который состоит из двух независимых батарей. Одна батарея для сохранения запрограммированной информации, вторая - для страховки и для увеличения емкости источника. Одну из батарей можно изъять и вместо батареи подключить внешний источник резервного питания. Приведено на черт. 16. Это может быть батарея сухих элементов или аккумуляторы напряжением от 3 до 4,5 В. Один внешний источник питания может подключаться к нескольким приборам ПРОТАР. Целесообразно страховочную батарею оставить.
ПРИМЕР ПОСТРОЕНИЯ ДИНАМИЧЕСКОЙ ИЛИ КАСКАДНОЙ СВЯЗИ МЕЖДУ РЕГУЛЯТОРАМИ
Черт. 15
ПОДКЛЮЧЕНИЕ ВНЕШНЕГО ИСТОЧНИКА РЕЗЕРВНОГО ПИТАНИЯ ВМЕСТО БАТАРЕИ СУХИХ ЭЛЕМЕНТОВ GB2, GВ4 МОДУЛЯ МР01
Черт. 16
Схема электрическая принципиальная модуля резервного питания МР01 приведена в приложении 6.
7. МОНТАЖ
Габаритные размеры приборов ПРОТАР приведены на черт. 3 и 4. Приборы рассчитаны на утопленный монтаж на вертикальной панели щита. Помещение должно быть взрывобезопасное и пожаробезопасное. Окружающая среда не должна содержать агрессивных паров, газов и аэросмесей.
Электрические соединения приборов выполняются в виде кабельных связей или в виде жгутов. Подключение внешних соединений к прибору осуществляется с помощью промежуточных клеммников, размещенных на щите. На этих клеммниках устанавливаются устройства для подключения входных сигналов (ВТ 05/2, ВТ 20/2, ВН 10/2)*.
* Габаритные и установочные размеры устройств ВТ 05/2, ВТ 20/2, ВН 10/2 и их электрические принципиальные схемы приведены в приложении 5 черт. 1 - 4.
Рекомендуется использовать кабели с сечением жил 0,75 - 1,5 мм2.
В отдельные кабели выделяются: входные цепи, выходные цепи и цепи питания.
Кабель входных цепей должен быть экранирован на участках воздействия электромагнитных и импульсных помех и там где проложены сильноточные цепи, связанные с другим оборудованием.
Сопротивление изоляции между отдельными жилами и между каждой жилой и землей для внешних силовых, входных и выходных цепей должно составлять не менее 40 МОм при испытательном напряжении 500 В.
Заземление шасси через клемму 20 и корпуса через специальный винт на задней стенке прибора.
8. ПРОГРАММИРОВАНИЕ
Для решения стандартных задач автоматического регулирования в приборе предусмотрена жесткая структура. Использование прибора в режиме жесткой структуры не отличается от использования непрограммируемых приборов. Прибор подключается в соответствии со схемой подключения и устанавливаются требуемые величины параметров настройки. Для того чтобы прибор функционировал в режиме свободно программируемой структуры, надо дополнительно составить программу реализации нужного алгоритма функционирования, ввести ее в прибор и отладить.
Программа, которая вводится в прибор для реализации заданной структуры, представляет собой запись последовательности команд в виде функций Fi и переменных Пi. Эта последовательность команд записывается при программировании как шаги программы. Каждому шагу присваивается порядковый номер. Максимальное количество шагов программы - 100. Первый шаг имеет номер - 00, а последний максимально возможный - 99. На черт. 2 приведен порядок введения программы в прибор (режим 5). В режиме 5 («ПС») производится установка номера шага программы, потом в режиме 5 («НС») устанавливается нужная команда.
Введенная последовательность команд формирует цепочечный алгоритм вычислений, промежуточные результаты которых запоминаются, а конечные результаты являются входными сигналами устройств вывода информации из прибора.
В табл. 8 приведен перечень переменных Пi. Общее количество Пi равно 78 (сигналы, параметры, настройки, результаты вычислений). Символы переменных высвечиваются на цифровом дисплее в режиме 3. В режиме 4 во время нажатия органа «П.Н» и в режиме 5 как обозначение команды Пi, соответствующей данному шагу программы.
Таблица 9
|
Символ функции |
Назначение |
Выполняемые алгоритмы |
Примечание |
|
|
F00 |
|
Ввод-вывод информации, фиксация конца программы |
1. Преобразование аналоговых сигналов A; b; с; d; е; h; у в цифровые. 2. Преобразование дискретных сигналов в цифровые:
3. Цифро-аналоговое преобразование = . 4. Широтно-импульсное преобразование (ШИМ): zБ; zМ; zB1; zМ1 = ∫(Е′; У′; dt; qp) 5. Цифро-дискретное преобразование: ZB
= ∫( 6. Индикация сигналов и переменных. 7. Диагностика отказов. |
Функция F00 является командой последнего шага программы. Вычисления производятся от шага 00 до шага, соответствующего функции F00. tо - время цикла. Символ qI = 1 Символ qII = 11 |
|
F01 |
|
Регулирование ПИД импульсное |
1. Введение задания Уо и вычисление рассогласования Е: Уо = Ро
+ 2. Введение динамической
балансировки (0 < tс < 9999) или
статической балансировки (tс =
9999) при переключении на режим ручного управления, введение зоны
нечувствительности 3. Выполнение в режиме автоматического управления алгоритма ПИД регулирования при управлении ИМ через ШИМ:
|
Tso = 100 с Ts [с] - время полного перемещения исполнительного механизма (ИМ) Результат вычислений у = Е. Одновременно с F01 не используется F02. |
|
F02 |
|
Регулирование ПИД аналоговое |
1. Введение задания Уо и вычисление рассогласования Е: Уо = Ро
+ 2. Введение динамической (0
< tс < 9999) или статической (tс = 9999) балансировки при переключении
на режим ручного управления, введение зоны нечувствительности 3. Выполнение в режиме автоматического управления алгоритма ПИД регулирования с аналоговым выходом:
4. Ограничение выходного сигнала: У- £ У £ У- |
Результат вычислений У = Одновременно с F02 не используются F01 и F11. |
|
F03 - F09 |
Не используются |
В табл. 9, 10 и 11 приведено математическое описание функций используемых при программировании структуры. Результат вычисления каждой из функций используется непосредственно как входной сигнал устройств вывода информации из прибора (F00, F01, F02, F14, F15) или же для последующих вычислений (результат вычисления обозначается в табл. как переменная «У»).
В табл. 9 приведены основные функции, определяющие выходные сигналы прибора и используемые однократно.
Функция F00 является командой последнего шага программы. В каждом цикле вычисления ведутся от шага 00 до шага, соответствующего команде F00. После чего цикл повторяется и если есть команды, записанные после шага, соответствующего команде F00, они игнорируются. Когда программа содержит один шаг 00 - F00, то происходит преобразование аналоговых и дискретных входных сигналов в цифровую форму и цифровых сигналов в аналоговую, импульсную и дискретную форму, выполняется функция индикации сигналов и переменных, функционирует программный блок диагностики отказов.
В табл. 10 приведены функции, используемые однократно.
Функции F10, F11, F12 - различные виды интеграторов. Сочетания функций F12, F13 реализует функцию программного задатчика.
Функции F14, F15 служат основой для формирования дополнительного канала регулирования с импульсным выходом, либо импульсатора.
Функции F16, F17, F18, F19 позволяют путем использования одного шага ввести в программу динамическое преобразование и масштабирование аналоговых сигналов.
В табл. 11 приведены функции используемые многократно.
Функции F0...F24 - одноместные. Эти функции производят вычисления с одной переменной X1.
После команды, содержащей одноместную функцию, должна следовать команда, содержащая функцию.
Таблица 10
|
Условный символ |
Назначение |
Размерность |
Алгоритм вычисления |
Примечание |
||
|
XI |
У |
|||||
|
F10 |
|
Интегратор задания |
Не используется |
% |
У11 = У11(0) при t = 0; (П08) £ Уi1 £ (П09) |
Ро - составляющая задания в функциях F01 и F02. Одновременно с F10 не используется F12 |
|
F11 |
|
Интегратор I |
% |
% |
У1 = У1 (0) при t = 0; У- £ У1 £ У- |
qр = 0 - автоматическое управление; qр = 1 - ручное. Одновременно с F11 не используется F02 |
|
F12 |
|
Интегратор II |
% |
% |
Уi1= У11 (0) при t = 0 |
Одновременно с F12 не используется F10 |
|
F13 |
|
Кусочно-линейное преобразование |
% |
% |
|
Для текущего значения X1: U - номер соответствующего отрезка; Uо = (ПОi) - Х1, где ПОi - конечная координата отрезка. |
|
F14 |
|
Двухпозиционное широтно-импульсное преобразование |
% |
Не используется |
Интегратор с постоянной времени
tо (выход
|
Используется дискретный выход zВ. Программно устанавливается Одновременно с F14 не используется F15. |
|
F15 |
|
Трехпозиционное широтно-импульсное преобразование |
% |
Интегратор с постоянной времени
tо (выход Минимальная длительность импульса 0,32 с. |
Используются дискретные выходы zВ и zН. Программно устанавливаются Одновременно с F15 не используется F14. |
|
|
F16 |
|
Масштабирование и демпфирование сигнала А |
% |
|
Уn-1 - значение У в предыдущем цикле вычислений |
|
|
F17 |
|
Масштабирование и демпфирование сигнала b |
% |
|
||
|
F18 |
|
Масштабирование, демпфирование и выборка-хранение сигнала с |
Не используется |
% |
|
|
|
F19 |
|
Дифференцирование и масштабирование сигнала d |
% |
|
||
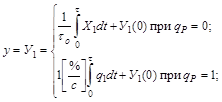
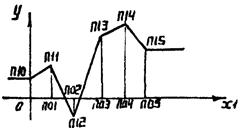
Таблица 11
|
Условный символ |
Назначение |
Размерность |
Алгоритм вычислений |
Примечание |
|||
|
Х1 |
Х2 |
У |
|||||
|
F20 |
|
Исключение операций |
т |
Переменная отсутствует |
т |
У = Х1 |
Используется для «стирания» или резервирования шагов |
|
F21 |
|
Инверсия |
т |
т |
У = -X1 |
||
|
F22 |
|
Выделение модуля |
т |
т |
У = |Х1½ |
||
|
F23 |
|
Извлечение квадратного корня |
% |
% |
|
||
|
F24 |
|
Выделение знака числа |
т |
- |
|
||
|
F25 |
|
Сложение |
т |
т |
т |
У = Х1 + Х2 |
|
|
F26 |
|
Вычитание |
т |
т |
т |
У = Х1 - Х2 |
|
|
F27 |
|
Умножение |
т |
- |
т |
У= Х1×Х2
|
при т - [%] /X1×Х2/ £ 3355 |
|
- |
т |
т |
|||||
|
т |
% |
т |
|||||
|
% |
т |
т |
|||||
|
F28 |
|
Деление |
т |
- |
т |
|
|
|
т |
т |
- |
|||||
|
т |
т |
т |
|||||
|
т |
% |
т |
|||||
|
F29 |
Не используется |
||||||
|
F30 |
|
Двухпозиционное преобразование |
т1 |
т2 |
т2 |
|
|
|
F31 |
|
Выделение положительных значений разности |
т |
т |
т |
|
|
|
F32 |
|
Ограничение по минимуму (выделение наибольшего) |
т |
т |
т |
|
|
|
F33 |
|
Ограничение по максимуму (выделение наименьшего) |
т |
т |
т |
|
|
|
F34 |
|
Переключение при изменении сигнала qС |
т |
т |
т |
|
|
|
F35 |
|
Переключение при изменении сигнала qP |
т |
т |
т |
|
qP = 0 - автоматическое управление, qP = 1 - ручное |
|
F36 |
|
Переключение при изменении сигнала qМ |
т |
т |
т |
|
|
|
F37 |
|
Переключение при изменении сигнала qБ |
т |
т |
т |
|
|
|
F38 |
|
Переключение при изменении сигнала q- |
т |
т |
т |
|
|
|
F39 |
|
Переключение при изменении сигнала q+ |
т |
т |
т |
|
|
|
F40 |
|
Вызов переменной для последующего вычисления |
т1 |
т2 |
т2 |
У = Х2 |
Пi - символ Х2, X1 не используется |
|
F41 |
|
Пересылка и запоминание результата предыдущего вычисления |
т |
т |
т |
|
Пi - символ Х2, X1 пересылается в Х2 и запоминается. Х2мин и Х2макс - граничные значения диапазона изменения Х2. |
|
F42 F45 |
Не используются |
||||||
|
F46 |
|
Апериодическое преобразование с управлением сигналом qP |
т |
с |
т |
Х2 = ti
|
При ti = 9999, а также при qP = 0 У = 0 |
|
F47 |
|
Апериодическое преобразование |
т |
с |
т |
Х2 = ti
|
При ti = 9999 У = 0 |
|
F48 |
|
Дифференцирование с управлением сигналом qP |
т |
с |
т |
Х2 = ti
0 при qP = 1 |
При ti = 9999, а также при qP = 0 |
|
F49 |
|
Дифференцирование |
т |
с |
т |
Х2 = ti
|
При ti = 9999 У = Х1 |
Примечания:
1. Переменная X1 является результатом предыдущего вычисления при реализации программируемой структуры. Переменная Х2 используется для функций F25 - F49 и записывается при программировании структуры следующим шагом после шифра функции. Результат вычисления У используется в свою очередь как переменная X1 для следующей функции.
2. Обозначения т, тi представляют одну из размерностей: [%] - величина в процентах, [-] - безразмерная величина, [с] - величина в секундах. При необходимости проведения вычислений над величинами с различными размерностями должны быть учтены следующие соотношения, которые связывают размерности между собой:
![]()
![]() Х[c]
= 16X[%] = 81,92×Х[-].
Х[c]
= 16X[%] = 81,92×Х[-].
Для параметра
![]() (длительность импульсов):
(длительность импульсов): ![]() [с] = Х
[%].
[с] = Х
[%].
3. В качестве постоянной времени ti для F46 - F49 выбирается один из параметров t1 - t8, причем каждый из них при программировании структуры записывается однократно как переменная Х2 для соответствующей функции.
Функции F25 ... F49 - двухместные, эти функции производят операции с двумя переменными X1 и Х2. После команды, содержащей двухместную функцию, должна следовать команда, содержащая переменную, выбранную в качестве Х2. После команды, содержащей переменную, должна следовать команда, содержащая функцию.
X1 - результат предыдущего вычисления, либо параметр введенный с помощью функции F40, а Х2 используется для двухместных функций F25 - F49 и записывается в следующем шаге, соответствующего шифру функции. Результат вычисления У автоматически используется в свою очередь как переменная X1 для следующей функции (цепочечное вычисление).
Для динамических звеньев F45...F49 переменная Х2 - одна из постоянных времени t1...t8, каждая из которых в программе используется однократно. Это ограничивает число динамических звеньев в программе до 8.
Следующие пары функций: F01 и F02, F02 и F11, F10 и F12, F14 и F15 используют одинаковые переменные и в программе может использоваться только одна из функций данной пары.
Переменные П00 ... П19, U, U1, U2, U0 (%), С0 ... С7 ( безразмерные коэффициенты), t1 ... t8 (постоянные времени, с) назначение этих переменных потребитель может устанавливать по своему усмотрению (если они не входят в какую-либо использованную функцию). Константы: П20 = 0,000 и П21 = 100,0 (%) могут использоваться в программе многократно. На дисплей символы этих констант вызываются только в режиме 5 («ПС» и «НС»).
Можно в программе использовать переменные, входящие в неиспользованные функции.
9. ПОСЛЕДОВАТЕЛЬНОСТЬ РАЗРАБОТКИ ПРОГРАММЫ
Составление программы функционирования прибора можно разбить на три этапа, что приведено на черт. 11.
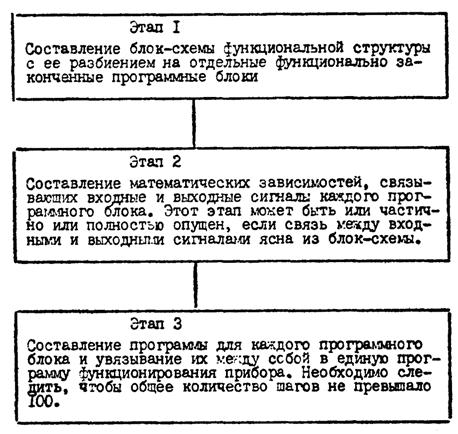
Черт. 11
Первым шагом программы может быть функция F40 (вызов переменной) или одна из функций F16 - F19, входными переменными которых являются входные сигналы прибора, а также F01, F02, F10, F20.
Функция F20 (отсутствие операции) может быть записана на любом шаге, кроме последнего (последний шаг - функция F00). Функция F20 нужна для резервирования места в программе, а так же для исключения ненужных шагов в программе. Для хранения промежуточных результатов вычислений следует использовать регистры свободных переменных.
10. ДОКУМЕНТИРОВАНИЕ ПРОЕКТА
Проект наряду с другими необходимыми материалами должен включать в себя следующие документы:
1. блок-схему функциональной структуры (пример приведен в прилож. 1);
2. программу функционирования прибора (составляется по форме, приведенной в табл. 12, пример составления таблицы приведен в прилож. 2);
3. перечень используемых переменных (составляется по форме, приведенной в табл. 13, пример составления таблицы приведен в прилож. 3);
4. электрическую схему подключения прибора (пример приведен в прилож. 4).
Таблица 12
|
Шаг |
Команда |
Примеч. |
Шаг |
Команда |
Примеч. |
Шаг |
Команда |
Примеч. |
|
00 |
37 |
73 |
||||||
|
01 |
38 |
74 |
||||||
|
02 |
39 |
75 |
||||||
|
03 |
40 |
75 |
||||||
|
04 |
41 |
77 |
||||||
|
05 |
42 |
78 |
||||||
|
06 |
43 |
79 |
||||||
|
07 |
44 |
80 |
||||||
|
08 |
45 |
81 |
||||||
|
09 |
45 |
82 |
||||||
|
10 |
47 |
83 |
||||||
|
11 |
48 |
84 |
||||||
|
12 |
49 |
85 |
||||||
|
13 |
50 |
86 |
||||||
|
14 |
51 |
87 |
||||||
|
15 |
52 |
88 |
||||||
|
16 |
53 |
89 |
||||||
|
17 |
54 |
90 |
||||||
|
18 |
55 |
91 |
||||||
|
19 |
56 |
92 |
||||||
|
20 |
57 |
93 |
||||||
|
21 |
58 |
94 |
||||||
|
22 |
59 |
95 |
||||||
|
23 |
60 |
96 |
||||||
|
24 |
61 |
97 |
||||||
|
25 |
62 |
98 |
||||||
|
26 |
63 |
99 |
||||||
|
27 |
64 |
|||||||
|
28 |
65 |
|||||||
|
29 |
66 |
|||||||
|
30 |
67 |
|||||||
|
31 |
68 |
|||||||
|
32 |
69 |
|||||||
|
33 |
70 |
|||||||
|
34 |
71 |
|||||||
|
35 |
72 |
|||||||
|
36 |
||||||||
Таблица 13
|
Переменная |
Величина |
Примеч. |
Переменная |
Величина |
Примеч. |
Переменная |
Величина |
Примеч. |
|
u |
|
|
||||||
|
A |
|
|
||||||
|
|
|
|
||||||
|
|
|
|
||||||
|
|
|
|
||||||
|
|
|
|
||||||
|
|
|
|
||||||
|
|
|
|
||||||
|
I |
|
|
||||||
|
II |
|
|
||||||
|
|
|
|
||||||
|
|
|
|
||||||
|
|
|
|
||||||
|
|
|
|
||||||
|
|
|
|
||||||
|
|
|
|
||||||
|
|
|
|
||||||
|
|
|
|
||||||
|
|
|
|
||||||
|
|
|
|
||||||
|
|
|
|
||||||
|
|
|
|
||||||
|
|
|
|
||||||
|
|
|
|
||||||
|
|
|
|
||||||
|
Р |
|
|
||||||
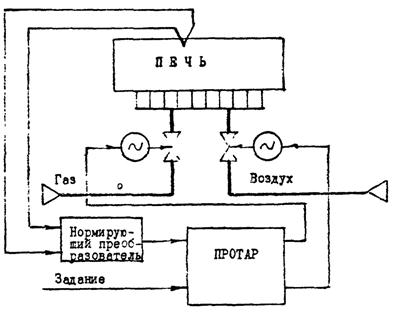
11. ПРИМЕР ПРИМЕНЕНИЯ ПРОТАРА В ЗАМКНУТОМ КОНТУРЕ РЕГУЛИРОВАНИЯ
Объектом регулирования является зона обжига кирпича туннельной печи. В этой зоне следует в соответствии с определенной программой (во времени) получить необходимую температуру и поддерживать ее с помощью сжигания газовыми горелками необходимого количества природного газа. Количество газа и одновременно окислителя (воздуха) изменяется регулирующими заслонками на трубопроводах газа и воздуха.
Черт. 12
На черт. 12 представлена схема, включающая в себя элементы замкнутого контура регулирования, который состоит из собственно объекта регулирования - печи с газовыми горелками, датчика температуры (термоэлектрического преобразователя) с нормирующим преобразователем, регулятора (ПРОТАРа) и двух исполнительных органов - запорно-регулирующих заслонок с электрическими исполнительными механизмами. Величина задания регулируемого параметра (температуры в определенной зоне печи) формируется специальным блоком (задатчиком).
Применение ПРОТАРа в рассматриваемом контуре регулирования обусловлено несколькими причинами, одной из которых является необходимость управлять одновременно двумя исполнительными органами, каждый из которых имеет свои исходные данные для перемещения заслонок, т.к. следует соблюдать расчетные соотношения между расходом газа и воздуха.
Таким образом, в данной структуре ПРОТАР несет несколько функций - функции регулятора, осуществляющего ПИД-закон регулирования для обоих исполнительных органов, и функции вычислительные - определяет соотношения положений исполнительных механизмов.
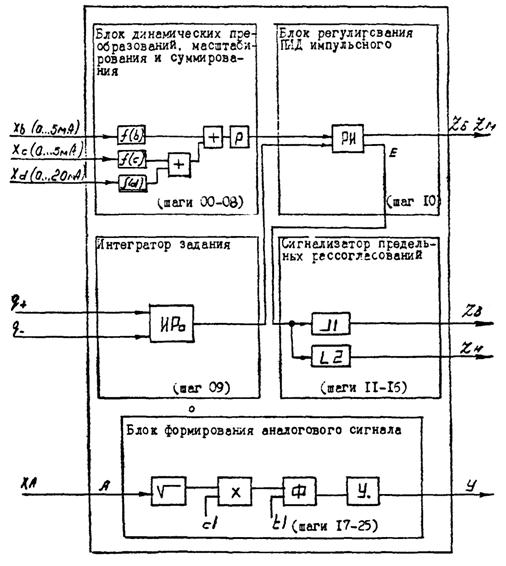
Для выполнения этих функций ПРОТАРом, в соответствии с инструкцией завода-изготовителя составляются: блок-схема функциональной структуры прибора, программа его функционирования и перечень используемых переменных, которые приведены соответственно на черт. 13 и в табл. 14 и 15.
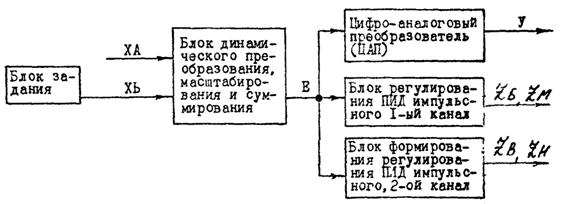
Черт. 13
Сигнал от датчика температуры поступает на вход ХА блока динамического преобразования. На вход Хb поступает сигнал от блока задания. В блоке динамического преобразования происходит масштабирование и преобразование входных величин в цифровую форму, необходимую для ввода в цифровое вычислительное устройство.
Величина рассогласования Е, полученная в результате вычислений между величиной задания и параметром, поступает на входы блока регулирования ПИД импульсного 1-го канале, блока формирования регулирования ПИД импульсного 2-го канала и на вход цифро-аналогового преобразователя (ЦАП).
В режиме автоматического управления в блоках реализуется ПИД импульсное регулирование с воздействием на исполнительные механизмы через широтно-импульсный модулятор, который представляет собой интегратор с последовательно включенным трехпозиционным элементом, охваченные жесткой обратной связью.
Для 1-го канала ШИМ преобразует входной сигнал в последовательность импульсов, управляющих выходными ключами zб и zм.
Для 2-го канала управляющими выходными ключами служат zв и zн.
Выходная величина ЦАП, в котором величина рассогласования В преобразуется в аналоговый сигнал, может использоваться для подключения показывающего прибора (клеммы 50 и 21). Показывающие приборы подключаются для визуального наблюдения за режимом выполнения технологического процесса.
По указанной блок-схеме составлена программа функционирования прибора, которая приведена в табл. 14.
Таблица 14
|
Команда |
Примечание |
|
|
00 |
F16 |
Масштабирование, демпфирование и запись величины сигнала ХА в ячейку П16 |
|
01 02 |
F41 Р |
Переслать содержимое ячейки П16 в ячейку параметра Р |
|
03 |
F17 |
Масштабирование, демпфирование и запись величины сигнала Хb в ячейку П17 |
|
04 05 |
F41 Ро |
Переслать содержимое ячейки П17 в ячейку Ро |
|
06 |
F01 |
ПИД-импульcное регулирование |
|
07 08 09 10 |
F40 E F41 Uo |
Вызвать рассогласование Е и переслать в ячейку параметра Uо |
|
11 12 13 14 |
F40 20 F41 УII |
Вызвать ячейку 20 и переслать содержимое на вход 2-го интегратора |
|
15 16 17 |
F40 Uo F22 |
Вызвать ячейку параметра Uо и выделить модуль |
|
18 19 |
F26 00 |
Вычитание из модуля содержимого ячейки 00 |
|
20 |
F30 |
Двухпозиционное преобразование |
|
21 |
Uo |
|
|
22 |
F27 |
|
|
23 |
c0 |
|
|
24 |
F41 |
|
|
25 |
01 |
|
|
26 |
F26 |
|
|
27 |
02 |
|
|
28 |
F41 |
|
|
29 |
03 |
|
|
30 |
F48 |
|
|
31 |
t6 |
|
|
32 |
F27 |
|
|
33 |
c6 |
|
|
34 |
F25 |
|
|
35 |
03 |
|
|
36 |
F41 |
|
|
37 |
03 |
|
|
38 |
F40 |
|
|
39 |
01 |
|
|
40 |
F41 |
|
|
41 |
02 |
|
|
42 |
F1 |
|
|
43 |
F32 |
|
|
44 |
L1 |
|
|
45 |
F33 |
|
|
46 |
|
|
|
47 |
F25 |
|
|
48 |
03 |
|
|
49 |
F35 |
|
|
50 |
20 |
|
|
51 |
F15 |
|
|
52 |
F40 |
|
|
53 |
E |
|
|
54 |
F41 |
|
|
55 |
Уо |
|
|
56 |
F00 |
Данная программа составлена при применении прибора ПРОТАР 100. Для прибора ПРОТАР 101 команды данной программы с шага 11 по шаг 51 можно заменить командой F05.
Перечень используемых переменных и их численные значения приведены в табл. 15.
Таблица 15
|
Величина |
Примечание |
|
|
А |
ХА |
Входной сигнал от датчика |
|
b |
Хb |
Входной сигнал задания |
|
|
30 % |
Оперативное задание |
|
|
100 % |
Предел оперативного задания |
|
с |
01 % |
Рассогласование для 1-го контура |
|
c0 |
1 |
Коэф. передачи для 2-го канала регулирования |
|
c1 |
0,5 |
Коэф. пропорциональности для 1-го канала регулирования |
|
|
500 |
Пост. интегр. для 1-го канала регулирования |
|
|
1000 |
Пост. интегр. для 2-го канала регулирования |
|
cd |
1 |
Коэф. дифференц. для 1-го канала регулирования |
|
cb |
2 |
Коэф. дифференц. для 2-го канала регулирования |
|
td |
30 |
Пост. дифференц. для 1-го канала регулирования |
|
tb |
60 |
Пост. дифференц. для 2-го канала регулирования |
|
|
0,40 |
Длит. импульса для 1-го канала регулирования |
|
|
0,5 % |
Зона нечувст. для 1-го канала регулирования |
|
П00 |
0,5 % |
Зона нечувст. для 2-го канала регулирования |
|
|
0,320 |
Пост. времени фильтра параметра |
|
|
99990 |
Пост. компенсации динамич. балансировки |
|
П20 |
0 % |
Постоянная величина |
|
Uo |
Bi % |
Рассогласование для 2-го контура регулирования |
|
c1 |
1 |
Коэф. при ХА |
|
с2 |
1 |
Коэф. при Хb |
|
t1 |
20 |
Постоянная фильтра ХА |
|
t2 |
0,320 |
Постоянная фильтра Хb |
|
Р |
Bi % |
Эквивалентный параметр |
|
Ро |
Xi % |
Исходное задание |
|
Уо |
Bi % |
Задание Уо =Ро + Оо |
|
У |
Bi % |
Входная величина ЦАП У = Е |
Примечания:
1. X - текущее значение входного сигнала
В - величина переменной, вычисляемая программно.
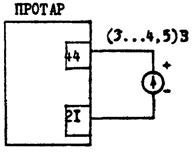
2. Клеммы 5 и 6 замкнуты, а 4 и 5 разомкнуты.
3. Установочные коэффициенты с0, с6, t1, t6, ![]() ,
, ![]() t,
с1, t1,
t,
с1, t1, ![]() ,
, ![]() ,
, ![]() ,
приведенные в данной таблице, предварительно определяются при расчетах.
Окончательно они корректируются при наладке САР на объекте.
,
приведенные в данной таблице, предварительно определяются при расчетах.
Окончательно они корректируются при наладке САР на объекте.
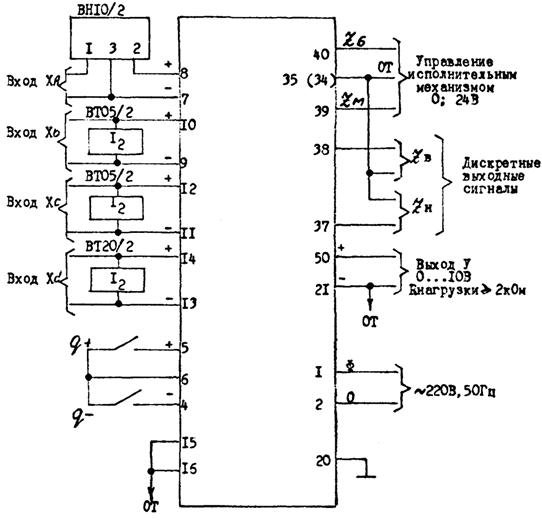
На черт. 14 приведена электрическая схема подключения ПРОТАРа.
Величина заданной температуры в контуре регулирования задается с пульта оператора, что учтено в составлении программы функционирования прибора ПРОТАР.
Задания можно осуществлять в самих приборах с помощью программ.
ЭЛЕКТРИЧЕСКАЯ СХЕМА ПОДКЛЮЧЕНИЯ ПРОТАРА
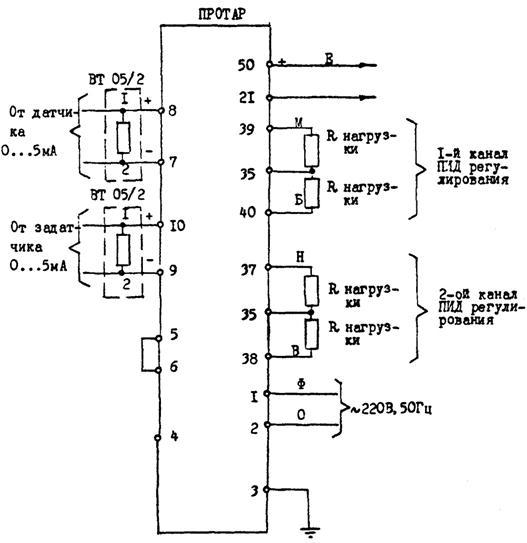
Черт. 14
Инструкция по набору и отладке программы на приборе ПРОТАР.
1. Подключить прибор в соответствии со схемой, указанной на черт. 14.
2. Включить напряжение питания прибора ~ 220 В, 50 Гц.
3. Перевести прибор в режим ручного управления кнопкой
![]() .
.
4. Установить 1-й режим прибора нажатием кнопки ![]() -
гашение экрана дисплея.
-
гашение экрана дисплея.
5. Кнопкой ![]() установить 5-й режим -
на экране дисплея высвечивается ПС ... F ... .
установить 5-й режим -
на экране дисплея высвечивается ПС ... F ... .
6. Кнопками ![]() установить шаг 99 - на
экране дисплея высвечивается ПС99 - это код, который разрешает набор структуры.
установить шаг 99 - на
экране дисплея высвечивается ПС99 - это код, который разрешает набор структуры.
7. Нажатием кнопки ![]() в течение 4 … 8 с
установить режим набора структуры - на экране дисплея высвечивается Н99.
в течение 4 … 8 с
установить режим набора структуры - на экране дисплея высвечивается Н99.
8. Произвести набор программ функционирования приборов согласно табл. 14. Для этого необходимо выполнить следующие операции:
8.1. Кнопкой ![]() установить на экране
дисплея просмотр структуры «ПС»;
установить на экране
дисплея просмотр структуры «ПС»;
8.2. Кнопками ![]() - номер шага;
- номер шага;
8.3. Кнопкой ![]() установить набор
структуры «НС»;
установить набор
структуры «НС»;
8.4. Кнопками ![]() установить команду
соответствующего шага.
установить команду
соответствующего шага.
9. Проверить правильность набора программ с помощью
кнопок ![]() в режиме «ПС».
в режиме «ПС».
10. Перевести дисплей в 3-й режим, который
устанавливается путем нажатия 3 раза кнопки ![]() , при этом на
экране дисплея высвечивается символ и переменная:
, при этом на
экране дисплея высвечивается символ и переменная:
![]()
3-й режим - режим просмотра и выбора переменных П и установка параметров настройки.
Кнопками ![]() выбрать нужную
переменную. Кнопкой
выбрать нужную
переменную. Кнопкой ![]() установить режим настройки - на экране
дисплея высвечивается «Н» вместо «П», переход от «П» к «Н» в первый раз требует
нажатия кнопки
установить режим настройки - на экране
дисплея высвечивается «Н» вместо «П», переход от «П» к «Н» в первый раз требует
нажатия кнопки ![]() в течение 4 ... 8 с.
в течение 4 ... 8 с.
Кнопками ![]() установить численные
значения переменных, указанных в табл. 15.
установить численные
значения переменных, указанных в табл. 15.
11. Проверить правильность набора параметров в режиме просмотра «П» 3-го режима.
12. Переключить кнопкой ![]() на
автоматическое управление.
на
автоматическое управление.
12. КОМПЛЕКТНОСТЬ
Комплект поставки каждого прибора соответствует табл. 16.
Таблица 16
|
Наименование и условное обозначение |
Количество |
Примечание |
|
|
гЕ3.222.030 гЕ3.222.032 |
Прибор |
1 шт |
Модификация согласно заказу |
|
гЕ5.105.121 |
Пульт оператора выносной ПО-01 |
Не более 1 шт |
Комплектуется согласно заказу только с прибором ПРОТАР 110 |
|
Устройство для подключения токовых сигналов |
|||
|
гЕ5.157.025 гЕ5.157.025-01 |
ВТ 05/2, ВТ 20/2, |
4 шт 2 шт |
|
|
сигналов напряжения |
|||
|
гЕ5.157.027 |
ВН 10/2 |
2 шт |
|
|
гЕ3.222.030ПС |
Паспорт |
1 шт |
|
|
гЕ3.222.030ТО |
Техническое описание и инструкция по эксплуатации |
1 шт |
Примечания:
1. При отсутствии в заказе прибора ПРОТАР 110 количества пультов ПО-01 поставляется не менее 1 пульта на каждые 5 приборов, поставляемых в один адрес.
2. Допускается комплектование нескольких приборов, поставляемых в один адрес, одним экземпляром технического описания и инструкции по эксплуатации, но не менее 1 экз. на каждые 5 приборов.
13. ЗАКАЗ ПРИБОРА ПРОТАР
Для модификации со встроенным пультом оператора: «Прибор регулирующий программируемый микропроцессорный ПРОТАР 100, ТУ 25-7441.0065-87».
Для модификации с выносным пультом оператора при наличии пульта в комплекте поставки: «Прибор регулирующий программируемый микропроцессорный ПРОТАР 110 в комплекте с пультом ПО-01, ТУ 25-7441.0065-87».
Для модификации с выносным пультом оператора при отсутствии пульта в комплекте поставки: «Прибор регулирующий программируемый микропроцессорный ПРОТАР 110, пульт в комплекте поставки отсутствует, ТУ 25-7441.0065-87».
При проектировании АСУ ТП на базе прибора модификации ПРОТАР 110 рекомендуется в спецификации проекта предусматривать по 1 пульту ПО-01 на 5 приборов ПРОТАР 110, но не менее 1 пульта.
ПРИЛОЖЕНИЕ 1
БЛОК-СХЕМА ФУНКЦИОНАЛЬНОЙ СТРУКТУРЫ ПРИБОРА ПРОТАР
ПРИЛОЖЕНИЕ 2
ПРОГРАММА ФУНКЦИОНИРОВАНИЯ ПРОТАР
|
Шаг |
Команда |
Примечание» |
Шаг |
Команда |
Примечание |
|
00 |
F17 |
П17 = f (b) |
15 |
F41 |
|
|
01 |
F18 |
П18 = f (с) |
16 |
|
выход zн |
|
02 |
F19 |
П19 = f (d) |
17 |
F40 |
|
|
03 |
F25 |
18 |
А |
||
|
04 |
П18 |
19 |
F23 |
|
|
|
05 |
F25 |
20 |
F27 |
||
|
06 |
П17 |
21 |
c1 |
|
|
|
07 |
F41 |
Вход интегр. задания |
22 |
F47 |
Фильтр |
|
08 |
Р |
Эквивал. параметр |
23 |
|
Пост. времени |
|
09 |
F10 |
Интеграт. задания |
24 |
F41 |
|
|
10 |
F01 |
ПИД или выход |
25 |
|
Выход У |
|
11 |
F40 |
26 |
F00 |
Конец программы |
|
|
12 |
Е |
Рассогласование |
|||
|
13 |
F41 |
||||
|
14 |
|
|
ПРИЛОЖЕНИЕ 3
ПЕРЕЧЕНЬ ИСПОЛЬЗУЕМЫХ ПЕРЕМЕННЫХ
|
Переменная |
Величина |
Примечание |
|
A |
Входной сигнал |
|
|
|
-"- |
|
|
|
-"- |
|
|
|
-"- |
|
|
|
Выходной аналоговый сигнал |
|
|
II |
q+/q- |
|
|
|
Рассогласование |
|
|
|
Масштаб. коэфф. |
|
|
|
-"- |
|
|
|
-"- |
|
|
|
-"- |
|
|
|
Исходное задание |
|
|
|
Оперативное задание |
|
|
|
Предел оперативного задания |
|
|
|
Общее задание |
|
|
Р |
Эквивал. параметр |
|
|
|
Пост. врем. фильтра Р |
|
|
|
Пост. дин. балансир. |
|
|
|
Зона нечувств. |
|
|
|
Коэфф. пропорц. |
|
|
|
Пост. врем. интегрир. |
|
|
|
Пост. врем. диффер. |
|
|
|
Коэфф. диффер. |
|
|
|
Длительн. импульса |
|
|
|
Верх. пред. рассоглас. |
|
|
|
Зона возврата |
|
|
|
Нижний пред. рассоглас. |
|
|
|
Зона возврата |
|
|
|
|
|
|
|
Пост. врем. инт. задан. |
|
|
|
Исход. зад.
|
|
|
|
Пост. врем. фильтр, |
|
|
|
Пост. врем. фильтра Хb |
|
|
|
Пост. врем. фильтра Хс |
|
|
|
Пост. врем. фильтра Хd |
|
|
|
Огр. мин. исх. зад. |
|
|
|
Огр. макс. исх. зад. |
|
|
|
f (b) |
|
|
|
f (c) |
|
|
|
f (d) |
ПРИЛОЖЕНИЕ 4
СХЕМА ПОДКЛЮЧЕНИЯ ПРИБОРА ПРОТАР
ПРОТАР
ПРИЛОЖЕНИЕ 5
УСТРОЙСТВА ВТ05/2, ВТ20/2, ВН10/2
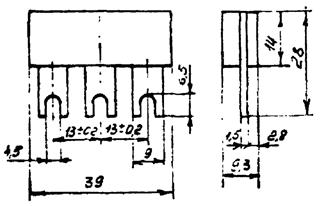
ГАБАРИТНЫЕ И УСТАНОВОЧНЫЕ РАЗМЕРЫ УСТРОЙСТВ ВТ 05/2, ВТ 20/2
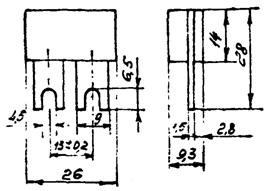
Черт. 1
ГАБАРИТНЫЕ И УСТАНОВОЧНЫЕ РАЗМЕРЫ УСТРОЙСТВА ВН 10/2
Черт. 2
СХЕМА ЭЛЕКТРИЧЕСКАЯ ПРИНЦИПИАЛЬНАЯ УСТРОЙСТВ ВТ 05/2, ВТ 20/2
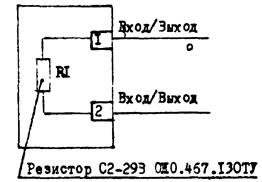
Черт. 3
СХЕМА ЭЛЕКТРИЧЕСКАЯ ПРИНЦИПИАЛЬНАЯ УСТРОЙСТВА ВН 10/2
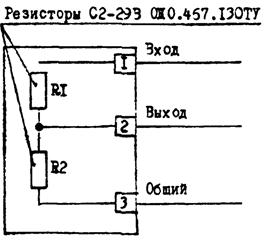
Черт. 4
ПРИЛОЖЕНИЕ 6
СХЕМА ЭЛЕКТРИЧЕСКАЯ ПРИНЦИПИАЛЬНАЯ МОДУЛЯ РЕЗЕРВНОГО ПИТАНИЯ МР01

GB1 - GB4 - элемент СЦ-0,18-У2 ТУ 16-729.372-82
VD1 - диодная сборка КДС 523А аА0.336.009ТУ
ИНФОРМАЦИОННЫЕ ДАННЫЕ
1. РАЗРАБОТАН Государственным проектным и конструкторским институтом «Проектмонтажавтоматика»
2. Исполнители: Н.А. Рыжов, А.М. Гуров, Е.В. Воронкова, В.В. Белокуров
СОДЕРЖАНИЕ