РОССИЙСКОЕ АКЦИОНЕРНОЕ ОБЩЕСТВО ЭНЕРГЕТИКИ
И ЭЛЕКТРИФИКАЦИИ «ЕЭС РОССИИ»
ОТКРЫТОЕ АКЦИОНЕРНОЕ ОБЩЕСТВО
«ФИРМА ПО НАЛАДКЕ, СОВЕРШЕНСТВОВАНИЮ ТЕХНОЛОГИИ
И ЭКСПЛУАТАЦИИ ЭЛЕКТРОСТАНЦИЙ И СЕТЕЙ ОРГРЭС»
РЕКОМЕНДАЦИИ
ПО ВЫБОРУ И ПРИМЕНЕНИЮ
СОВРЕМЕННЫХ СРЕДСТВ
ТЕЛЕМЕХАНИКИ
С ПРОГРАММИРУЕМОЙ ЛОГИКОЙ
ПРИ МОДЕРНИЗАЦИИ
ЭНЕРГЕТИЧЕСКИХ ОБЪЕКТОВ
СО 34.48.526
|
СЛУЖБА ПЕРЕДОВОГО ОПЫТА ОРГРЭС |
|
|
Москва |
2000 |
Разработано Открытым акционерным обществом «Фирма по наладке, совершенствованию технологии и эксплуатации электростанций и сетей ОРГРЭС»
Исполнитель В.С. ШИЛОВ
Утверждено АО «Фирма ОРГРЭС» 21.12.98
Заместитель генерального директора Б.И. МЕХАНОШИН
В работе даны рекомендации предприятиям энергетических систем по выработке концепции модернизации телемеханического оборудования и проведению маркетинга современных средств телемеханики на рынке электронной техники.
Изложенные в Рекомендациях материалы позволяют осуществить осознанный выбор приобретаемой продукции в соответствии с намеченной концепцией модернизации.
1. ВВЕДЕНИЕ
В процессе эксплуатации телемеханических устройств их технические характеристики изменяются, приближаясь к предельно допустимым значениям. Одновременно исчерпываются информационные ресурсы устройств, что ограничивает дальнейшее наращивание объемов обрабатываемой информации, необходимое при развитии энергосистем.
Параллельно средствам телемеханики на энергетических объектах создаются и развиваются локальные автоматизированные системы управления технологическими процессами (АСУ ТП). Обе структуры располагают собственными базами данных, во многом повторяющими одна другую, но находящимися в полной изоляции. Предоставляющиеся возможности, связанные с увеличением «живучести» структур за счет взаимного использования информации, остаются нереализованными.
Техническая эволюция средств технологического контроля (под контролем понимается не только сбор и обработка информации, но и реализация выработанных на ее основе управляющих воздействий на технологические процессы) обусловила переход от устройств телемеханики с «жесткой логикой» (Hard) к обладающим известными преимуществами устройствам с программируемой логикой (Soft).
В настоящее время в эксплуатации находятся как программируемые устройства (в основном это центральные приемо-передающие станции - ЦППС и/или современные комплексы телемеханики), так и устройства с жесткой логикой (в основном это передающие аппараты контролируемых пунктов - КП).
Ресурсы основной части находящихся в эксплуатации средств телемеханики (особенно это относится к средним и частично к верхним ступеням иерархической структуры диспетчерского и технологического управления) к настоящему времени практически полностью исчерпаны. Задача дальнейшего развития связана с необходимостью существенной модернизации имеющихся средств телемеханики.
Решение вопроса о необходимости замены устройств регламентируется «Руководящими указаниями по критериям оценки технического состояния аппаратуры телемеханики энергосистем с целью определения необходимости ее замены или реконструкции: РД 34.48.511-96» (М.: СПО ОРГРЭС, 1997).
На следующем этапе возникает проблема выбора концепции модернизации и необходимых программно-аппаратных средств.
Модернизация должна сопровождаться улучшением характеристик средств телемеханики:
увеличением информационной емкости;
расширением функциональных возможностей;
повышением достоверности и точности передаваемой информации;
повышением надежности;
снижением потребляемой мощности (при этом упрощается проблема вентиляции);
улучшением механических показателей;
расширением рабочего температурного диапазона;
улучшением эксплуатационных характеристик (безотказности, ремонтопригодности, готовности).
На рынке современного электронного оборудования представлен широкий ассортимент отечественных и импортируемых изделий. Наплыв аппаратуры вызван появлением в экономической структуре государства элементов рыночных отношений, сопровождающихся выходом на рынок отечественных конверсионных оборонных предприятий и иностранных (в основном западноевропейских) фирм.
Умение ориентироваться в предлагаемой рынком продукции - необходимое условие успешной модернизации. Серьезные затруднения у покупателей при выборе аппаратуры вызывает отсутствие унифицированных сравнительных характеристик и четкой концепции модернизации.
В настоящих Рекомендациях рассмотрена основная группа средств телемеханики, предлагаемых рынком, разработаны и приведены унифицированные сравнительные характеристики по рассматриваемым средствам и предложена концепция модернизации средств телемеханики энергетических объектов.
Сведения по данной работе формировались и проверялись на различных отраслевых совещаниях и семинарах, участниками которых были ведущие специалисты фирм-разработчиков и представители различных энергосистем, на специализированных совещаниях и семинарах, регулярно проводимых ЦДУ ЕЭС России.
При выработке рекомендаций учтен опыт разработки, производства и внедрения программируемых телемеханических комплексов, технические характеристики применяемой элементной базы и электронных компонентов ведущих мировых лидеров с учетом предлагаемых ими эффективных решений.
В ходе изложения даются основные понятия, относящиеся к современным открытым системам:
локальным промышленным сетям;
инструментальным средствам программирования;
исполнительным программным продуктам;
операционной системе реального времени.
2. ОБЩИЕ ПОЛОЖЕНИЯ
Формирование представления о современном рынке электронной продукции следует начать с исторической справки.
В начальный период формирования коммерческих отношений рынок электроники испытывал некоторый вакуум товарной продукции, так как в производстве традиционной гражданской телемеханики в это время наблюдался спад, а оборонные заводы выжидали и не торопились с конверсией.
На рынке начали появляться относительно дорогие электронные средства иностранных фирм (в основном это были персональные компьютеры). Спустя некоторое время к освоению рынка приступили отечественные конверсионные предприятия. Складывались условия конкуренции.
Отечественная гражданская продукция наиболее полно отвечала технологии энергетики, что было ее неоспоримым преимуществом, но серьезно уступала в качестве аппаратных средств и особенно в программном обеспечении. Продукция конверсионных заводов, напротив, плохо учитывала специфику энергетической технологии, но имела лучшую программно-аппаратную базу.
Процесс перехода от Hard к Soft в гражданской и оборонной промышленности проходил по-разному.
2.1. Программно-аппаратные средства отечественных гражданских производителей
Отечественная и зарубежная телемеханика стартовали примерно в одинаковых условиях. В то время в телемеханике обеих сторон применялись системы интенсивности (частота, амплитуда, длительность элементов, число импульсов сообщений). Цифровые коды как форма сообщений (импульсно-кодовые системы) появились несколько позже.
Обстоятельства развития сторон различались. Существенные различия имеются, например, в протяженности и качестве каналов связи. Европа может работать в стандартных протоколах обмена информацией между контролируемыми и диспетчерским пунктами. Для России каналы связи из-за большой протяженности всегда были самым «узким» местом в процессе передачи информации, поэтому приходилось применять специфичные телемеханические структуры сигналов в протоколах обмена информацией, сохраняя минимальную необходимую избыточность (для экономии времени передачи) и используя помехозащищенное кодирование (для обеспечения требуемой достоверности информации в условиях значительных помех в каналах связи).
В вопросах разработки и практического использования телемеханических протоколов и концепции передачи телеинформации мы имели некоторое преимущество перед Западом.
Заметное расхождение началось с отставания в развитии элементной базы и средств вычислительной техники. Отечественные разработчики были вынуждены приспосабливаться к имеющейся в распоряжении элементной базе, испытывая всевозможные ограничения при реализации технических решений.
Зарубежные разработчики без особого напряжения, не стремясь проектировать чего-либо специального телемеханического, использовали очередные наработки из вычислительной техники. Именно в вычислительной технике были сосредоточены наибольшие и наилучшие силы разработчиков.
Опережение в развитии направления определили Запад в качестве «законодателя мод», хотя совсем не все в продукции Запада идеально. Многие программные продукты не отличаются законченностью («сырые»), но объемы разработок таковы, что не остается никакой возможности что-либо изменять. Приходится пользоваться тем, что общепринято и доступно.
Известно, например, что азбука Морзе оптимальна для английского языка (в английском языке чаще других встречается буква «е», и этой букве в азбуке Морзе соответствует самая короткая посылка - одна точка) и совсем не оптимальна для русского (в русском языке наиболее употребительны другие буквы), но с этим приходится мириться.
Подобное просматривается и в современных программных продуктах.
Разработка и последующий выпуск гражданских средств телемеханики проходил в условиях существенных ограничений как в выборе элементной базы (директивная ориентация на собственную продукцию), так и в программировании (недоступность программных продуктов открытых общеевропейских и мировых систем).
Например, любой из протоколов обмена информацией устройств телемеханики (каким бы сложным он ни оказался у конкретного устройства) необходимо было разместить (вплоть до исключения отдельных функций) в 2 Кбайтах памяти, так как именно таким объемом памяти обладала единственно доступная в то время микросхема постоянной памяти (типа К573 РФ2).
В таких обстоятельствах не представлялось возможным применение каких-либо иных средств программирования, кроме трудоемкого программирования в Ассемблере или в машинных кодах.
Разрабатываемые в то время различными гражданскими организациями контроллеры с программируемой логикой из-за вышеизложенных обстоятельств проектировались, что называется, по минимуму, т.е. они успешно выполняли предназначенные им на сегодняшний день функции, но в процессе эксплуатации их возможности быстро исчерпывались и с особой остротой проявлялись их недостатки:
ограничения по требуемым объемам памяти для новых прикладных пользовательских задач;
недостаточное быстродействие в условиях возрастающих объемов информации (известны случаи, когда совершенно исправное устройство уже не успевало справляться даже с декларированным полным объемом информации, что приводило к сбоям в его работе);
неспособность к развитию (физическое отсутствие мест для установки новых модулей ввода/вывода и принципиальная невозможность их организации);
затруднения или полная невозможность интегрироваться с создаваемыми параллельно другими информационными структурами;
уникальность технических и программных решений, а отсюда прямая зависимость заказчика от конкретного разработчика (или группы).
Тем не менее разработка и внедрение гражданских отечественных средств телемеханики обеспечили требуемую управляемость технологическими процессами энергетики в течение длительного времени, при этом следует отметить сравнительную дешевизну отечественной телемеханики.
В последнее время кризисные явления развития стали ощущаться острее, так как с налаживанием рыночных отношений значительно возросла потребность в расширении объемов информации, что вызвано необходимостью более детального учета производства, распределения и потребления тепловой и электрической энергии. Одновременно возрос интерес к прикладным программам по дополнительной обработке поступающей информации. Однако реализация новых проектов всякий раз оказывалась в тупике из-за ограничений со стороны программно-аппаратных средств. Возросшие количественные требования вынуждали к качественным изменениям.
Поставленная задача имеет выраженный экономический характер. Решение ее позволяет в кратчайшие сроки получить неоспоримые преимущества (особенно пионерам начинания), поэтому для ее успешного воплощения следует создать режим наибольшего благоприятствования в вопросах финансирования проектирования.
2.2. Программно-аппаратные средства отечественных производителей (конверсионных предприятий)
В выигрышном положении оказались отечественные разработчики конверсионных предприятий, которые уже имели опыт работы с продуктами открытых систем. Они определенное время как бы «варились в среде» и в готовом виде предстали на рынке программируемых средств телемеханики России.
На рынке электронного оборудования появился широкий ассортимент изделий, изготовленных конверсионными оборонными предприятиями. В большинстве случаев это высококлассная продукция с хорошими показателями надежности и условий эксплуатации. Предлагаемые контроллеры с программируемой логикой можно разделить на две группы:
контроллеры, спроектированные в закрытых системах (состоящие из специфичных технических и программных элементов);
контроллеры, спроектированные в среде открытых систем (использующие широко распространенные инструментальные и исполнительные программные продукты, выполненные в принятых международных стандартах).
2.2.1. Программно-аппаратные средства закрытых систем
Эта группа контроллеров конверсионных предприятий существенно выигрывает в сравнении с гражданскими по:
техническому исполнению;
используемой элементной базе;
надежности;
эксплуатационным характеристикам;
компоновке;
экономичности.
Однако остаются все негативные признаки, принципиально свойственные контроллерам закрытых систем:
наступает жесткое ограничение дальнейшего развития (не проявляющееся вначале), связанное с исчерпанием ресурса процессора и особенно предоставленных объемов памяти;
наступают конструктивные ограничения развития (например, отсутствие свободных мест для установки дополнительных модулей или блоков и отсутствие возможности их организации);
отсутствует возможность интегрирования с другими информационными системами, в том числе работы в информационных сетях;
как правило, изделие изготавливается одним единственным предприятием-изготовителем по собственной документации (закрытая технология), следовательно заказчик оказывается в зависимости иногда не только от предприятия-изготовителя, но часто и от конкретного разработчика на этом предприятии.
Для устранения указанных недостатков необходимо перейти в среду открытых систем. Неизбежность этого шага отчетливо видна на примере западноевропейских фирм.
2.2.2. Программно-аппаратные средства открытых систем
Многие фирмы, начиная как закрытые, в настоящее время, подчиняясь коммерческим интересам (в коллективизме их упрекать не следует), совместно согласовали концепцию и образовали единое открытое для своих и других членов пространство программно-технических средств (при этом для обеспечения совместимости продуктов многое пришлось переделать).
Среди специалистов, занимающихся разработкой программно-аппаратных средств, сегодня популярен термин «открытая система» или «открытая технология». Многие вкладывают в этот термин свое понимание. Часто это сводится лишь к наличию и доступности для модификации алгоритмов и листингов (исходных кодов) прикладных программ, используемых в проектах. На самом деле термин открытости применим лишь к тем системам, основу которых, во-первых, составляют международные стандарты (на аппаратное обеспечение, базовое программное обеспечение, программный инструментарий, программы, организующие работу в сети) и, во-вторых, эти стандарты должны быть доступны любому пользователю. Если эти условия обеспечиваются, то такая система считается открытой.
Рассмотрим преимущества, приобретаемые с переходом к открытым системам:
разработка, выполненная каким-либо одним членом данной системы, становится достоянием всех ее членов;
быстрее выявляются возможные ошибки и вносятся необходимые коррективы (ведь, возможно, в проверке примут участие многие разработчики и эксплуатационный персонал);
проверка окажется более качественной, так как реализуется на большем отрезке времени (хотя время самой проверки мало, но так как проверка осуществляется одновременно в нескольких местах, суммарное время проверки может быть продолжительным);
большее количество разработчиков (а не единственный - «кустарь-одиночка») оказывается вовлеченным в наработку общего для всех базового продукта;
любой продукт (программный или технический) можно применять в проектах любого члена системы (без каких-либо переработок или доделок);
расширяется рынок сбыта продукции (продукция коллективно отработана, опробована в течение продолжительного суммарного времени и пригодна к использованию в проектах широкого круга разработчиков);
овладение адаптированными и отработанными инструментальными средствами позволяет значительно облегчить разработку и сократить ее сроки;
исчезает зависимость заказчика от конкретного разработчика (или группы), так как и аппаратная, и программная части (включая прикладные и инструментальные программы) - широко распространенный товар европейского (и мирового) рынка.
За счет применения современных открытых стандартных технологий, облегчающих разработку проектов и сокращающих сроки разработки, система приобретает преимущество, переводящее ее в авангард.
Применение современных открытых технологий снимает ограничения развития, позволяет гибко изменять конфигурацию комплексов устройств, на базе распространенных персональных компьютеров обеспечить визуализацию технологических процессов (микро-ОИК), адаптироваться к уже существующим системам и организовать постепенное внедрение (наращивание), что облегчает решение проблемы финансирования проекта.
Исключение составляют прикладные программы, реализующие специфические телемеханические протоколы обмена отечественных телемеханических устройств; программы, улучшающие эксплуатационные характеристики (программы инерционной синхронизации телемеханических устройств; программные фильтры промышленной частоты; программы, реализующие метку времени, и т.д.). Поскольку все эти разработки проводились посредством открытых инструментальных средств, то, следовательно, при крайней необходимости могут быть повторены другими.
3. УСЛОВНАЯ КЛАССИФИКАЦИЯ ПРОМЫШЛЕННЫХ КОНТРОЛЛЕРОВ, ОБЩИЕ ПОЛОЖЕНИЯ
При реализации какой-либо функции контроллеру (для размещения программы) необходим определенный объем памяти, следовательно, контроллер, обладающий большим объемом памяти, способен выполнять больше функций.
Размеры программ, реализующих одну и ту же функцию, могут сильно различаться (это зависит от уровня программиста и от применяемого языка программирования - чем «ниже» язык программирования, тем, как правило, компактнее программа).
Программные продукты открытых систем имеют сравнительно большую избыточность (для организации файловой структуры программ, для обеспечения необходимой универсальности), поэтому для их размещения требуется несколько больше памяти.
Как видно из вышеизложенного одним из важнейших отличительных признаков контроллеров является объем предоставляемой памяти. По располагаемым объемам памяти контроллеры можно условно разделить на четыре группы:
первая - объем памяти до 2 Кбайт;
вторая - объем памяти до 8 Кбайт;
третья - объем памяти до 64 Кбайт (включительно);
четвертая - объем памяти более 64 Кбайт.
В нормальном рабочем режиме динамические характеристики технологических процессов в электроэнергетике не предъявляют высоких требований к быстродействию устройств телемеханики (аварийные режимы не рассматриваются). Основным «узким местом» на сегодняшний день, ограничивающим скорость обмена данными в телемеханике, является канал связи, а не производительность процессора, однако при обработке больших объемов информации (это относится к контроллерам третьей и четвертой групп) даже в нормальном рабочем режиме от контроллера требуется высокая производительность (иначе он не сможет успевать работать в реальном масштабе времени).
Производительность процессора - второй важнейший отличительный признак контроллеров.
По тактовой частоте (производительности) контроллеры можно условно разделить на четыре группы:
до 1 МГц;
до 8 МГц;
до 20 МГц;
более 20 МГц.
Работа программно-аппаратных средств в реальном масштабе времени предполагает развитую структуру устройств связи с объектами контроля (УСО). Обмен данными осуществляется через коммуникационные порты. Количество реализуемых коммуникационных портов - третий отличительный признак контроллеров.
Через коммуникационные порты осуществляется связь с инструментальными и отладочными средствами, имеющимися сетями (промышленными, локальными и др.), каналами связи (основными и резервными).
3.1. Контроллеры на основе элементной базы общего применения
Контроллеры различаются и по используемой элементной базе:
контроллеры, интегрированные из элементной базы общего применения (в основе логические элементы);
контроллеры, построенные на базе однокристальных микро-ЭВМ;
контроллеры, использующие микропроцессорные наборы.
Некоторые производители от конверсионных предприятий, имея определенный наработанный опыт, предлагали программируемые устройства, собранные из элементной базы общего применения. Такие контроллеры не имели в своем составе математических блоков и поэтому не могли выполнять математических операций. Все программы, написанные для них, содержали только логические действия.
Программирование осуществлялось на специфичном машинно-ориентированном языке, на специально разработанных для этого средствах программирования. Объем памяти составлял 2 Кбайта.
Такие контроллеры способны выполнять простые, в основном линейные программы (простейшие автоматы с заданной последовательностью действий, игрушки, несложная бытовая техника и др.). Для решения задач энергетики они непригодны и в дальнейшем рассматриваться не будут.
3.2. Контроллеры на основе микропроцессорных наборов
3.2.1. Контроллеры с памятью до 8 Кбайт
Программа, реализующая канальный протокол обмена данными устройства телемеханики, составляет (в среднем) 2 Кбайта (исключение составляет устройство «ГРАНИТ», программа для которого не умещается в 2 Кбайта).
Кроме обязательной функции обмена информацией контроллеры данной группы на оставшиеся 6 Кбайт способны выполнить несложную предварительную обработку, например переупаковку данных при ретрансляции. Работать с большим числом УСО такой контроллер не сможет, так как не сумеет разместить многозадачную операционную систему реального времени с драйверами и пр., следовательно, контроллеры с памятью до 8 Кбайт (применительно к средствам телемеханики) можно успешно использовать в канальных адаптерах устройств передачи и приема информации.
3.2.2. Контроллеры с памятью до 64 Кбайт
Контроллеры с памятью до 64 Кбайт способны работать в полном объеме традиционных телемеханических функций, так как могут разместить многозадачную операционную систему реального времени со всей атрибутикой; программы, реализующие канальные протоколы обмена данными устройств телемеханики, и многие пользовательские программы.
Исполнять нетрадиционные функции (работу в промышленных сетях Profibus, следовательно, организацию распределенных систем сбора и обработки информации, архивирование, хранение нормативной информации, визуализацию, фильтрацию, сглаживание, суммирование, организацию временных срезов информации - трендов) данные контроллеры не смогут из-за ограниченной памяти. Особенно много памяти требуется для организации функций архивирования, хранения нормативной информации и визуализации.
3.2.3. Контроллеры с памятью более 64 Кбайт
Контроллеры с памятью более 64 Кбайт обычно имеют память, значительно превышающую 64 Кбайта (обычно 0,5 Мбайт и более). Такой скачок объясняется качественными изменениями в структуре адресации (адресуемое пространство выходит за пределы одного шестнадцатибитного слова).
Контроллеры этой группы способны выполнить любые задачи телемеханики, включая организацию микро-ОИК. Фактически это уже не контроллеры в привычном понимании, а, скорее, мини-ЭВМ (по объемам памяти, производительности процессоров, возможностям связи с УСО и др.).
Программирование таких контроллеров может осуществляться стандартными средствами открытых систем.
На рис. 1 показана условная классификация промышленных контроллеров.

Рис. 1. Условная классификация промышленных контроллеров
4. СОСТОЯНИЕ РЫНКА СОВРЕМЕННЫХ СРЕДСТВ ТЕХНОЛОГИЧЕСКОГО КОНТРОЛЯ С ПРОГРАММИРУЕМОЙ ЛОГИКОЙ ДЛЯ ЭЛЕКТРОЭНЕРГЕТИКИ
4.1. Программно-аппаратные средства отечественных производителей (гражданских и конверсионных предприятий)
Отечественные производители выпускают следующие программно-аппаратные средства:
передающее устройство контролируемого пункта КП-Р (Рязанский приборный завод);
устройство сбора данных «Дельта ТМ» (АООТ «Пенза-энерго» и НИИАИТ, г. Пенза);
систему телемеханики «ТЕКА» (НИИ «Аргон», г. Москва);
автоматизированную систему диспетчерского контроля и управления АСДКУ КС-10 (НТВЦ «САТУРН-90» и ТОО «СЕВКО», г. Москва);
устройство сбора данных УСД (ТОО «Системы телеуправления»);
устройство КП «Телеканал-М» (АОЗТ «Системы связи и телемеханики», г. Санкт-Петербург);
устройство интеллектуальное контролируемого телемеханического пункта телекомплекса «СЕВЕР-М» (НПО «Автоматика» Министерства оборонной промышленности);
микропроцессорный телемеханический комплекс МПТК-КП (завод «Электропульт», г. Санкт-Петербург);
устройства на базе контроллеров В202ПК «СПРУТ» (ОАО «Отделение разработки систем», г. Киров).
4.2. Программно-аппаратные средства производителей, использующих контроллеры зарубежных фирм
Контроллеры зарубежных фирм используются производителями следующих программно-аппаратных средств:
устройства КП на базе контроллеров типа TeleSAFE (Канада) - АО «КОНУС» (Чередин), г. Москва;
устройства КП на базе контроллеров типа PLCDirekt (Япония и США) - АО «КОНУС» (Чередин), г. Москва;
устройства КП (названия еще не имеет) - ФЩ «КОНУС» (Полещук); Нижневартовские электрические сети Тюмень-энерго, г. Нижневартовск;
устройства КП «нижнего уровня» типа DEP-PL - АОЗТ «ДЕП», г. Москва;
комплекса устройств типа МСТ (СТЕЛКО) - представители польских фирм в г. Москве;
устройства на базе контроллеров фирмы SIEMENS - представители фирмы SIEMENS в г. Москве;
устройства на базе контроллеров фирмы Асеа Броун Бовери Лтд. (АВВ) типа RTU200 - представители фирмы АВВ в г. Москве;
устройства SMART-КП на базе контроллеров SMART I/O фирмы PEP Modular Computers - ЗАО РТСофт, г. Москва;
устройства SMART-КП на базе контроллеров SMART2 (дальнейшее развитие контроллера SMART I/O) фирмы РЕР Modular Computers - ЗАО РТСофт, г. Москва;
устройства SMART-КП на базе контроллеров IUC 9000 фирмы PEP Modular Computers - ЗАО РТСофт, г. Москва;
устройства SMART-КП на базе контроллеров VME 9000 фирмы PEP Modular Computers - ЗАО РТСофт, г. Москва.
4.3. Программно-аппаратные средства открытых систем
Всем требованиям открытых систем отвечает устройство SMART-КП.
Ориентируясь на контроллер SMART-КП, конечный пользователь получает:
безболезненный переход со старой технологии на новую без разрушения уже сложившейся системы сбора и обработки телеинформации;
возможность работы со всеми старыми телемеханическими протоколами, а также с только что появившимися на российском рынке;
все ресурсы стандартной операционной системы реального времени OS-9;
мощнейший программный инструментарий, соответствующий всем основным международным стандартам;
возможность работы в самых популярных в мире протоколах промышленных сетей (PROFIBUS, MODBUS);
возможность организации непосредственно на контролируемом пункте (на базе персонального компьютера) системы отображения информации - микро-ОИК;
полную поддержку и сопровождение в России.
5. ФОРМА ОБОБЩЕННОЙ ТАБЛИЦЫ СРАВНИТЕЛЬНЫХ ХАРАКТЕРИСТИК СРЕДСТВ ТЕЛЕМЕХАНИКИ
5.1. Общие положения
Паспортные данные устройств от разных производителей имеют существенные различия в наборе характеризующих изделие параметров, поэтому бывает трудно проводить сравнительную оценку таких устройств.
Для сравнительной оценки программно-аппаратных средств телемеханики требуется определить необходимый набор технических параметров и в соответствии с ним составить для каждого устройства таблицы.
Набор технических параметров должен быть минимальным, но достаточным для полной характеристики изделий.
5.2. Основные сравнительные параметры
К основным сравнительным параметрам относятся:
5.2.1. Объем предоставляемой пользователю памяти.
5.2.2. Производительность центрального процессора.
5.2.3. Количество коммуникационных портов.
5.2.4. Наличие коммуникационных сопроцессоров.
5.2.5. Возможность работы в промышленных сетях.
5.2.6. Наличие контроля целостности цепей ввода телесигнализации.
5.2.7. Наличие контроля цепей ввода телеизмерений.
5.2.8. Наличие гальванической развязки цепей ввода телесигнализации от системы.
5.2.9. Наличие гальванической развязки цепей ввода телесигнализации между собой.
5.2.10. Наличие гальванической развязки цепей ввода телеизмерений от системы.
5.2.11. Наличие гальванической развязки цепей ввода телеизмерений между собой.
5.2.12. Объем телеизмерений текущих (ТИТ).
5.2.13. Объем телесигнализации (ТС).
5.2.14. Объем телеизмерений интегральных (ТИИ).
5.2.15. Объем команд телеуправления (ТУ).
5.2.16. Возможность ретрансляции.
5.2.17. Объем команд телерегулирования (ТР).
5.2.18. Возможность работы по нескольким направлениям по различным протоколам и с разной скоростью одновременно.
5.2.19. Скорости передачи по каналам связи.
5.2.20. Питающее напряжение.
5.2.21. Возможность резервирования питания от батареи аккумуляторов оперативного тока.
5.2.22. Диапазон рабочих температур.
5.2.23. Потребляемая мощность.
5.2.24. Наличие встроенных модемов.
5.2.25. Регистрация событий во внутренней очереди с метками времени.
5.2.26. Возможность подключения персонального компьютера к любому устройству комплекса.
5.2.27. Наличие сертификата Госстандарта России.
5.2.28. Возможность организации микро-ОИК.
5.2.29. Возможность изменения режима работы и конфигурации каждого устройства непосредственно на объекте или с диспетчерского пункта.
6. СРАВНИТЕЛЬНЫЕ ХАРАКТЕРИСТИКИ ОСНОВНЫХ УСТРОЙСТВ (БАЗА ДАННЫХ)
В табл. 1 приведены сравнительные данные устройств по двум основным параметрам:
объемам предоставляемой пользователю памяти;
производительности процессоров.
В табл. 2 сведены данные по третьему отличительному признаку контроллеров - количеству реализуемых коммуникационных портов и скорости передачи информации по каналам связи.
В табл. 3 приведены данные по видам и объемам передаваемой информации.
В табл. 4 приведены данные по параметрам входных и выходных сигналов.
Сравнительные характеристики контроллеров по типам процессоров и объемам памяти
|
№ п.п. |
Тип устройства |
Память устройства, Кбайт |
Процессор |
|||||
|
EPROM |
DRAM (ОЗУ) |
SRAM (ПЗУ) |
Тип |
Тактовая частота, МГц |
Сопроцессор (наличие) |
|||
|
FLASH |
Ультраф. |
|||||||
|
1 |
КП-Р |
Нет |
До 8 |
2 |
Нет |
Intel 80С51 |
4 |
Нет |
|
2 |
Дельта-ТМ |
- |
- |
- |
- |
- |
- |
- |
|
3 |
КОМПАС ТМ 2.0 |
256 |
Нет |
256 |
Нет |
С165, С51, ATMega |
20 |
ADSP-21 |
|
4 |
ТЕКА |
- |
- |
- |
- |
- |
- |
- |
|
5 |
КС-10М |
- |
2 |
- |
До 32 |
Philips, 80С552 |
- |
Нет |
|
6 |
СИСТЕЛ |
- |
32; до 64 |
32; до 64 |
- |
Intel, 80C188, Octagon Sistems |
- |
Нет |
|
7 |
Телеканал-М |
- |
- |
- |
- |
Z-80 |
8 |
Нет |
|
8 |
Север-М |
2 |
- |
2 |
- |
Однокрист. ЭВМ, КР1816ВЕ31, КР1816ВЕ751 |
12 |
- |
|
9 |
МПТК-КП |
- |
128 |
32 |
- |
БИС-микропроцессоры, серии К580, КР1810ВМ86 |
- |
Есть |
|
10 |
«Конус» TeleSAFE |
- |
- |
- |
- |
TeleSAFE |
- |
- |
|
11 |
«Конус» PLCDirekt |
- |
- |
- |
- |
PLCDirekt |
- |
- |
|
12 |
«Конус» (Полещук) |
- |
- |
- |
- |
IBM PC/AT, 386 и выше |
- |
Есть |
|
13 |
DEP-PL |
- |
- |
256 (до 1000) |
256 (до 512) |
Контроллер DECONT, Z182 |
25 |
Нет |
|
14 |
МСТ |
- |
- |
- |
- |
Motorola 68000, |
- |
МС68 |
|
(СТЕЛКО) |
шинаVМЕ |
НС11 |
||||||
|
15 |
SIEMENS |
20 |
Нет |
20 |
Нет |
SIMATIC S5-100U (103) |
- |
CP52I |
|
16 |
RTU 200 (АВВ) |
8 или 32; +128* |
Нет |
64 +128* |
128 |
80186 |
10 |
8752 |
|
17 |
SMART-КП |
1024 |
1024 |
512 |
64 |
МС68302 |
20 |
1 |
|
18 |
СПРУТ |
- |
- |
- |
- |
Контроллер В202ПК |
- |
Нет |
|
__________ *Внешняя дополнительная память. |
||||||||
Сравнительные характеристики контроллеров по интерфейсам и скоростям передачи
|
№ п.п. |
Тип устройства |
Тип интерфейса |
Скорость передачи, бит/с |
Наличие гальванической развязки |
||
|
RS232, шт. |
RS485, шт. |
SPI/SPS (наличие) |
||||
|
1 |
КП-Р |
1 |
Нет |
Нет |
50 - 1200 |
Нет |
|
2 |
Дельта-ТМ |
- |
1 |
Нет |
50 - 1200 |
- |
|
3 |
КОМПАС ТМ 2.0 |
2 |
2 |
Нет |
50 - 1200 |
Есть |
|
4 |
ТЕКА |
1 |
1 |
Нет |
50 - 1200 |
- |
|
5 |
КС-10М |
1 |
Нет |
Нет |
До 9600 |
Есть |
|
6 |
СИСТЕЛ |
2 |
1 |
Нет |
50 - 600; 1200 (до 4800) |
Есть |
|
7 |
Телеканал-М |
1 |
1 |
Нет |
50 - 1200 |
Есть |
|
8 |
Север-М |
1 |
Нет |
Нет |
50; 100; 200; 300 |
Есть |
|
9 |
МПТК-КП |
Нет |
1 |
Нет |
50 - 1200 |
- |
|
10 |
«Конус» TeleSAFE |
Нет |
1 |
Нет |
50 - 1200 |
- |
|
11 |
«Конус» PLCDirekt |
Нет |
1 |
Нет |
50 - 1200 |
- |
|
12 |
«Конус» (Полещук) |
- |
- |
- |
- |
- |
|
13 |
DEP-PL |
2 |
2 |
Нет |
50 - 1200 |
Есть |
|
14 |
МСТ (СТЕЛКО) |
1 |
4 |
- |
50 - 4800; 9600 |
Есть |
|
15 |
SIEMENS |
1 |
1 |
Нет |
110 - 9600 |
Есть |
|
16 |
RTU 200 (АВВ) |
1 (в локальной сети без ограничений) |
1 (в локальной сети без ограничений) |
Есть |
50 - 9600; 19200 |
Есть |
|
17 |
SMART-КП |
2 (в локальной сети без ограничений) |
1 (в локальной сети без ограничений) |
Есть |
50 - 9600; 19200 |
Есть |
|
18 |
СПРУТ |
1 |
- |
- |
- |
Есть |
Сравнительные характеристики контроллеров по объемам телеинформации
|
№ п.п. |
Тип устройства |
Объем информации по ее видам |
|||||
|
ТИТ |
ТИИ |
ТС |
ТУ |
БЦИ |
РТ |
||
|
1 |
КП-Р |
От 32 до 64; шаг 32 |
От 16 до 64, шаг 16 |
От 16 до 64, шаг 16 |
От 32 до 64, шаг 32 |
От 16 до 64, шаг 16 |
От 16 до 64, шаг 16 |
|
2 |
Дельта-ТМ |
До 80 суммарно |
До 80 суммарно |
До 80 суммарно |
До 80 суммарно |
Нет |
В объемах ТИТ и ТС |
|
3 |
КОМПАС ТМ 2.0 |
Без ограничений, шаг 8 дифференциальных; или 16 униполярных |
Без ограничений, шаг 8 |
Без ограничений, шаг 8 |
Без ограничений, шаг 8 |
Нет |
В объемах ТИТ и ТС |
|
4 |
ТЕКА |
16 |
Нет |
128 |
256 |
Нет |
Нет |
|
5 |
КC-10M |
От 0 до 64, шаг 8 |
До 8 |
До 96, шаг 8 |
До 32, шаг 8 |
Нет |
Нет |
|
6 |
СИСТЕЛ |
32/64, шаг 8 |
24 |
96/192, шаг 8 |
16/24, шаг 8 |
- |
- |
|
7 |
Телеканал-М |
От 0 до 64, шаг 8 |
- |
От 0 до 128, шаг 16 |
От 0 до 64, шаг 8 |
Нет |
В объемах TИT и ТС |
|
8 |
Север-М |
64 |
32 |
96, до 128 |
32 |
Нет |
В объемах ТИТ и ТС |
|
9 |
МПТК-КП |
От 32 до 320, шаг 32 |
От 32 до 320, шаг 32 |
От 32 до 320, шаг 32 |
От 32 до 640, шаг 64 |
Есть |
Есть |
|
10 |
«Конус» TeleSAFE |
От 8, шаг 8 |
- |
От 8, шаг 8 |
От 8, шаг 8 |
Нет |
В объемах ТИТ и ТС |
|
11 |
«Конус» PLCDirekt |
От 4 до 16, шаг 4 |
- |
16, шаг 16 |
8, шаг 8 |
Нет |
В объемах ТИТ и ТС |
|
12 |
«Конус» (Полещук) |
- |
- |
- |
- |
- |
- |
|
13 |
DEP-PL |
8 |
8 (для DEP PL/FC) |
16 |
8 |
Нет |
В объемах ТИТ и ТС |
|
14 |
МСТ (СТЕЛКО) |
~128, шаг 64; =64, шаг 32 |
64, шаг 32 |
1024, шаг 256 |
64 |
- |
В объемах ТИТ и ТС |
|
15 |
SIEMENS |
32, шаг 4/8 |
- |
256, шаг 4/8 |
16, шаг 4 |
Нет |
В объемах ТИТ и ТС |
|
16 |
RTU 200 (АВВ) |
До 255 (8 бит), до 147 (16 бит), (в локальной сети без ограничений), шаг 8 |
До 255 (в сети без ограничений ), шаг 16 |
До 1176 (в сети без ограничений), шаг 16 |
До 588 (в сети без ограничений), шаг 16 |
Без ограничений |
Без ограничений, шаг 16 |
|
17 |
SMART-КП |
Без ограничений, шаг 6/32 дифференциальных; или 12/64 униполярных |
Без ограничений, шаг 8 |
Без ограничений, шаг 8 |
Без ограничений, шаг 16 |
Без ограничений |
Без ограничений, шаг 8 |
|
18 |
СПРУТ |
До 128, шаг 32 |
До 256 в любом соотношении с ТС |
До 256 в любом соотношении с ТИИ |
До 108, шаг 12 |
- |
В объемах ТИТ и ТС |
Сравнительные характеристики контроллеров по входным и выходным параметрам
|
№ п.п. |
Тип устройства |
Входы ТИТ |
Входы ТС |
Выходы ТУ |
||||
|
I |
R |
U |
U |
I |
I |
U |
||
|
мА |
кОм |
В |
В |
мА |
А |
В |
||
|
1 |
КП-Р |
0 - 5; |
2,5 |
0 - 10 |
=19 ÷ 29 |
6 - 20 |
4 |
~12 - 220 |
|
-5 ÷ 0 ÷ +5 |
||||||||
|
2 |
Дельта-ТМ |
0 - 5, |
1,0 |
- |
=24 |
5 |
4 |
~12 - 220 |
|
-5 ÷ 0 ÷ +5 |
||||||||
|
3 |
КОМПАС |
0 - 5; |
- |
- |
=12/24, |
10 |
- |
- |
|
ТМ 1.0; |
-5 ÷ 0 ÷ +5 |
=48/60 |
||||||
|
ТМ 1.1; |
|
|
||||||
|
ТМ 2.0 |
||||||||
|
4 |
ТЕКА |
- |
- |
- |
- |
- |
- |
- |
|
5 |
КС-10М |
0 - 5; |
1,0 |
Нет |
=24 |
10 |
- |
- |
|
4 - 20 |
||||||||
|
6 |
СИСТЕЛ |
0 - 5; |
- |
0 - 10 |
- |
- |
4 |
~12 - 220 |
|
-5 ÷ 0 ÷ +5; |
||||||||
|
0 - 20; |
||||||||
|
4 - 20 |
||||||||
|
7 |
Телеканал-М |
0 - 5, |
1,0 |
- |
=10 ÷ 16 |
6 - 12 |
5 |
~220 |
|
-5 ÷ 0 ÷ +5; |
||||||||
|
4 - 20 |
||||||||
|
8 |
Север-М |
0 - 5; |
1,0 |
±10 |
=15 |
6 |
5 |
~250 |
|
|
|
-5 ÷ 0 ÷ +5; |
|
|
|
|
|
|
|
|
|
4 - 20 |
|
|
|
|
|
|
|
9 |
МПТК-КП |
0 - 5 |
0,2 |
0 - 10 |
=12 ÷ 18 |
|
6 |
~12 ÷ 360 |
|
|
|
0 - 10 |
0,1 |
(на |
±20 % |
10 - 40 |
0,25 |
=220 |
|
|
|
-5 ÷ 0 ÷ +5 |
0,1 |
2 кОм) |
|
|
0,44 |
=110 |
|
10 |
«Конус» |
0 - 5; |
1,0 |
Нет |
=24 |
5 |
8 |
~220 |
|
|
TeleSAFE |
-5 ÷ 0 ÷ +5 |
|
|
|
|
|
|
|
11 |
«Конус» |
0 - 5; |
1,0 |
Нет |
=24 |
5 |
4 |
~220 |
|
|
PLCDirekt |
-5 ÷ 0 ÷ +5 |
|
|
|
|
|
|
|
12 |
«Конус» |
- |
- |
- |
- |
- |
- |
- |
|
|
(Полещук) |
|
|
|
|
|
|
|
|
13 |
DEP-PL |
0 - 5; |
|
0 - 5; |
|
|
|
|
|
|
|
0 - 20; |
0,13 |
0 - 10; |
30 |
10 - 20 |
5 |
~220 |
|
|
|
4 - 20 |
|
>40 кОм |
|
|
|
|
|
14 |
МСТ |
~5000 |
0,01 |
~100 |
- |
- |
- |
- |
|
|
(СТЕЛКО) |
~1000 |
0,01 |
- |
|
|
- |
- |
|
|
|
0 - 5 |
- |
- |
- |
- |
- |
- |
|
|
|
±5 |
- |
- |
- |
- |
5 |
~220 |
|
|
|
0 - 10 |
- |
- |
- |
- |
- |
- |
|
|
|
4 - 20 |
- |
- |
- |
- |
- |
- |
|
15 |
SIEMENS |
±20; |
- |
±0,05; |
=24; |
- |
5; |
~250; |
|
4 - 20 |
±0,5; |
=60; |
2,5 |
=30 |
||||
|
|
±1,0 |
~115; |
|
|
||||
|
|
|
~230 |
|
|
||||
|
16 |
RTU200 |
±2,5 |
0,4 |
±1,0 |
=24 |
- |
8 - 4,6 |
~250 - 440 |
|
|
(ABB) |
±5,0 |
0,2 |
±10,0 |
=48 |
Oт 2 |
0,9 |
=300 |
|
|
|
±10,0 |
0,1 |
(100 кОм) |
=60 |
- |
- |
- |
|
|
|
±20,0 |
0,05 |
- |
- |
- |
- |
- |
|
17 |
SMART-КП |
0 - 5 |
1,0 |
0 - 10 |
=18 ÷ 36 |
- |
6 |
~12 ÷ 360 |
|
|
|
-5 ÷ 0 ÷ +5 |
0,5 |
- |
(=60) |
2 - 6 |
0,25 |
=220 |
|
|
|
0 - 20 |
0,25 |
- |
- |
- |
0,44 |
=110 |
|
|
|
4 - 20 |
0,25 |
- |
- |
- |
- |
- |
|
18 |
СПРУТ |
±5,0; |
- |
±5 |
24 |
20 |
10 |
~380 |
|
|
|
±10,0; |
|
|
|
|
|
|
|
|
|
±20,0 |
|
|
|
|
|
|
7. РЕКОМЕНДАЦИИ ПО ОБЛАСТЯМ ПРИМЕНЕНИЯ ПРОГРАММИРУЕМЫХ ТЕЛЕМЕХАНИЧЕСКИХ УСТРОЙСТВ
7.1. Устройства для энергетических объектов 6 - 10 кВ
Для телемеханизации энергетических объектов напряжением 6 - 10 кВ пригодны устройства первого или второго типов. Обычно на таких объектах нет постоянного дежурного персонала, а техническое обслуживание устройств осуществляется централизованно энергопредприятиями.
Объем информации с таких объектов, как правило, невелик. Климатические условия могут быть жесткими, условия обслуживания (профилактические осмотры, плановые и неплановые ревизии, настройка, необходимый ремонт) - затрудненными. Ощущаются недостаток места, отсутствие необходимой мебели, недостаточная освещенность, дискомфортный температурный режим, постоянно довлеющая, мешающая сконцентрироваться транспортная озабоченность. В таких обстоятельствах наиболее эффективным способом восстановления нормальной работы телемеханики следует считать ее замену на заведомо исправную. Сравнительная дешевизна и простота устройств первого и второго типов наилучшим образом соответствуют задаче телемеханизации энергетических объектов напряжением 6 - 10 кВ.
При введении элементов АСУ (например, учет ресурса работы электрооборудования и др.) рекомендуем применять программируемые устройства последующих типов.
7.2. Устройства для подстанций 35 кВ
Функцию телемеханики на подстанции напряжением 35 кВ рекомендуется решать посредством контроллеров второго типа, если нет необходимости коммерческого учета электроэнергии, и третьего или четвертого типа, если необходимость коммерческого учета электроэнергии имеется.
Аппаратура коммерческого учета электроэнергии (например, ИИСЭ 3) сама обладает большими объемами памяти и способна длительное время продолжать нормальное функционирование (без разрушения информации) при отключении питающего напряжения.
Тем не менее устройство телемеханики должно считать накопленную информацию и ретранслировать ее на диспетчерский пункт. В памяти устройства телемеханики необходимо разместить программу интерфейсного драйвера и программу переупаковки данных в телемеханический формат. Для этого необходимо предусмотреть резерв памяти.
Контроллеры третьего или четвертого типов сами могут с успехом выполнять функции концентраторов устройств сбора и передачи данных (УСПД) в системе автоматического контроля и учета электроэнергии (АСКУЭ). Конечно, это будет именно технический контроль, так как для коммерческого контроля необходима защита от несанкционированного доступа и сертификация данной функции.
Следует воздержаться от совмещения функции АСКУЭ и телемеханических функций в одном контроллере (хотя такая возможность для контроллеров четвертого типа имеется), так как при таком решении эксплуатация телемеханики будет сильно затруднена. Лучше для АСКУЭ установить отдельный контроллер, а телемеханическому контроллеру можно оставить функцию дублирующего технического учета электроэнергии.
7.3. Устройства для подстанций 110 - 220 кВ
На подстанциях напряжением 110 - 220 кВ могут быть установлены комплексы регистрации аварийных переключений (КРАП, производства ОЗАП Мосэнерго или аналогичные им), автономные устройства коммерческого учета электроэнергии, может быть налажен учет ресурсов работы оборудования подстанции.
Для интегрирования телемеханики со всем станционным оборудованием необходимы достаточные объемы памяти и повышенные требования к быстродействию устройства.
На этих подстанциях рекомендуется устанавливать контроллеры не ниже третьего типа.
7.4. Устройства для подстанций 330 - 550 кВ
Кроме функций, указанных для подстанций 110 - 220 кВ, на подстанциях 330 - 550 кВ может быть внедрена автоматизированная система управления технологическими процессами (АСУ ТП), имеющая весьма широкие функции (а следовательно, нуждающаяся в больших объемах памяти) и требующая быстрой реакции, т.е. быстродействия от средств телемеханики.
На подстанциях данного класса рекомендуется устанавливать контроллеры третьего и четвертого типов.
7.5. Крупные электростанции, электроцентрали
Принимая во внимание блочную структуру энергообъектов данного вида, рекомендуем применять распределенную систему телемеханики, построенную на контроллерах четвертого типа.
Контроллеры отдельных энергоблоков объединяются между собой промышленной сетью Profibus. В качестве линии связи используется «витая пара».
Благодаря обмену информацией по сети Profibus базы данных, сформированные отдельными контроллерами распределенной системы, объединяются в одну общую базу данных, доступную внешним пользователям (устройства распределенной системы выступают при этом как одно с единственной интегрированной базой данных).
8. РЕКОМЕНДАЦИИ ПО ВЫБОРУ КОНЦЕПЦИИ МОДЕРНИЗАЦИИ
8.1. Общий подход
При выборе устройств для модернизации энергетических объектов следует иметь в виду следующее:
приобретать аппаратуру, удовлетворяющую задачам только текущего момента, без учета перспективы, не следует, так как процессы современной информатики в энергетике развиваются стремительно и вскоре снова может встать вопрос о необходимости решения очередных задач, связанных с заменой аппаратных средств; если даже в ближайшее время не планируется никаких изменений в конфигурации системы телемеханики, а предполагается ее нормальная эксплуатация в существующих объемах и функциях, то и тогда рекомендуется приобретать программно-аппаратные средства с учетом перспективы развития;
при ограниченности финансирования не следует приобретать относительно дешевую, но бесперспективную продукцию; лучше подождать или приобрести только часть необходимой аппаратуры, поскольку современные средства телемеханики обеспечивают постепенное наращивание и интегрирование с уже имеющимся на объекте оборудованием;
перспективные программно-аппаратные средства телемеханики, обладающие способностью развития, с большим интересом эксплуатируются молодым персоналом службы;
среди аппаратуры с перспективой развития безусловное предпочтение следует отдать открытым системам.
8.2. Выбор открытых систем
Возможность работы в стандартных промышленных сетях часто остается единственным способом интегрирования открытых систем с имеющимися на объектах закрытыми системами (которые представляет, например, известная фирма АВВ).
Преимущества открытых систем изложены в разд. 2.2.2.
При выборе открытых систем, даже в том случае, когда разработка новых прикладных программ и изменение рабочей конфигурации устройств (в процессе развития энергосистемы) заказчиком не предполагаются, всегда сохраняется возможность существующему эксплуатационному персоналу или его преемникам в случае необходимости внести необходимые изменения.
Закрытые системы такой возможности не дают.
9. РЕКОМЕНДАЦИИ ПО ВЫБОРУ КОНКРЕТНЫХ ТЕЛЕМЕХАНИЧЕСКИХ УСТРОЙСТВ
В разд. 3.1 настоящих Рекомендаций упоминалось, что контроллеры, изготовленные на основе элементной базы общего пользования (без специализации), в настоящее время в электроэнергетической отрасли применять не следует из-за крайней ограниченности их функциональных возможностей. В энергетике нужно применять контроллеры на основе специализированной элементной базы - однокристальных микро-ЭВМ или микропроцессорных наборов.
Контроллеры, интегрированные на основе однокристальных микро-ЭВМ и микропроцессорных наборов, условно разделены на четыре группы по объемам, предоставляемым пользователям памяти.
Контроллеры первой группы
Контроллеры первой группы (с объемом памяти до 2 Кбайт) могут успешно использоваться в качестве коммуникационных в линейных модулях любых средств телемеханики, так как предоставляемый пользователю объем памяти достаточен для размещения программ телемеханических протоколов большинства устройств телемеханики (кроме протокола устройства «ГРАНИТ»). Для решения других задач следует применять контроллеры второй-четвертой групп.
Контроллеры второй группы
Контроллеры второй группы (с объемом памяти до 8 Кбайт) могут успешно использоваться в качестве коммуникационных в линейных модулях любых средств телемеханики, так как предоставляемый пользователю объем памяти достаточен для размещения программ телемеханических протоколов практически любых устройств телемеханики (включая протокол устройства «ГРАНИТ»).
Контроллеры второй группы позволяют решать задачи телемеханизации энергетических объектов напряжением 6 - 10 и 35 кВ (при отсутствии на объектах АСУ и/или систем коммерческого учета энергии).
Ко второй группе относятся контроллеры следующих типов:
КП-Р;
КС10-М;
Телеканал-М.
Контроллеры третьей группы
Контроллеры третьей группы (с объемом памяти до 64 Кбайт) могут успешно использоваться для решения задач телемеханизации подстанций напряжением 110 - 220 кВ (при отсутствии функции архивирования и необходимости создания библиотеки нормативно-технической документации).
К третьей группе относятся контроллеры следующих типов:
СИСТЕЛ;
Север-М;
«КОНУС» TeleSAFE;
«КОНУС» PLCDirect;
«КОНУС» (Полещук);
SIEMENS;
RTU-200 (базовая конфигурация);
SMART-КП (малая конфигурация);
СПРУТ.
Контроллеры четвертой группы
В контроллерах четвертой группы (с объемом памяти более 64 Кбайт) предоставляемые пользователю возможности позволяют решать практически любые задачи телемеханизации, включая архивирование данных, создание нормативно-технической библиотеки, работу в промышленных сетях (что особенно важно при создании распределенных систем телемеханики на блочных энергетических объектах), автоматический учет ресурса оборудования телемеханизируемого энергетического объекта, автоматизированный технический учет электроэнергии.
На объектах электроэнергетики отдельные комплексы на базе промышленных программируемых логических контроллеров, относящихся к четвертому типу, могут выполнять следующие специальные функции (но при этом не должны совмещаться функции телемеханики):
коммерческий учет расхода электроэнергии;
осциллографирование аварийных процессов для контроля функционирования устройств РЗА;
обнаружение мест повреждения воздушных линий электропередачи 110 - 500 кВ;
прямой ввод значений напряжения и тока с измерительных трансформаторов;
контроль включения выключателя на короткозамкнутую линию;
максимально-токовую и тепловую защиту фидера;
диагностику технического состояния осветительных сетей и управляющего оборудования.
В телемеханике контроллеры четвертого типа можно использовать для телемеханизации электрических станций и подстанций 110 - 500 кВ, а также для телемеханизации распределительных подстанций 35 - 110 кВ. Однако учитывая сравнительно большую стоимость, такие контроллеры рекомендуется использовать для телемеханизации подстанций напряжением 330 - 550 кВ и крупных электростанций.
К четвертой группе относятся контроллеры следующих типов:
КОМПАС ТМ 2.0;
МПТК-КП;
DEP-PL;
SIEMENS (локальная сеть из нескольких устройств);
RTU-200 (с расширенной памятью);
SMART-КП (с любым контроллером).
На рис. 2 представлена схема применения программируемых логических контроллеров при телемеханизации (модернизации) энергетических объектов.
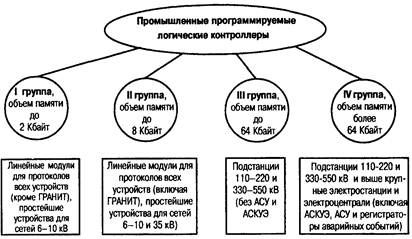
Рис. 2. Рекомендации по применению промышленных контроллеров
10. ЗАКЛЮЧЕНИЕ
Современные программируемые логические контроллеры обладают замечательными возможностями и позволяют решать практически любые возникающие при строительстве или модернизации энергетических объектов задачи автоматизации и телемеханизации.
Тем не менее при выборе устройств не следует полностью полагаться на данные, предоставляемые производителями, так как по рекламным соображениям многие фирмы (в настоящее время абсолютное большинство) в своей информации не ограничивают выпускаемую продукцию ни в функциональных возможностях, ни в объемах информации, ни в оперативности работы, ни в метрологических характеристиках (справедливости ради нужно отметить, что характеристики современных аналого-цифровых преобразователей свободно удовлетворяют требованиям телемеханики). Фактической проверке необходимо подвергать каждую функцию и каждый параметр устройства, даже если результат проверки кажется совершенно очевидным.
Наилучшую гарантию соответствия требованиям энергетики могут обеспечить устройства, прошедшие сертификацию в электроэнергетической отрасли.
Изначально контроллеры выпускаются универсальными, т.е. предназначенными для широкого круга применений. Устройства, использующие универсальные контроллеры, бывают тем лучше, чем меньше содержат дополнений и изменений, т.е. чем ближе они к оригиналу. Однако универсальность не позволяет учесть специфику всех отраслей, что вынуждает вносить необходимые дополнения. Фирмы, практикующие на адаптации универсальных контроллеров в данной конкретной отрасли, часто сами находятся «в начале пути», поэтому не имеют достаточной квалификации.
В ноябре 1998 г. в павильоне «Москва» ВВЦ состоялся «Круглый стол» по программируемым средствам телемеханики. Присутствовали представители ведущих иностранных фирм-производителей и ведущие отечественные разработчики телемеханической аппаратуры. Группу потребителей аппаратуры составили представители нескольких энергосистем.
Была подтверждена тенденция развития современных средств телемеханики в направлении «интеллектуализации» аппаратуры; увеличения объемов памяти, применения процессоров большей производительности, широкого использования сопроцессоров (многие модули устройств сами содержат микропроцессоры, т.е. являются интеллектуальными). Одновременно прослеживалось возрастание интереса к открытым системам.
За время подготовки настоящих Рекомендаций среди существующих фирм - производителей средств телемеханики произошли структурные изменения, связанные в основном с их делением на несколько организаций (например, ТОО «Системы телеуправления»). За этот период некоторые фирмы стали проявлять большую активность на рынке средств телемеханики (например, ОАО «Отделение разработки систем», г. Киров). Процесс продолжается непрерывно и поэтому не воспроизведен точно в данной работе.
Для получения полной информации на текущий момент в приложении приведен перечень адресов и контактных телефонов фирм-производителей.
Приложение
ПЕРЕЧЕНЬ АДРЕСОВ И КОНТАКТНЫХ ТЕЛЕФОНОВ ФИРМ-ПРОИЗВОДИТЕЛЕЙ СРЕДСТВ ТЕЛЕМЕХАНИКИ
|
№ п.п. |
Тип устройства |
Адрес и контактные телефоны |
Изменения |
|
1 |
КП-Р |
390000, г. Рязань, ул. Каляева, д. 32, (0912) 79-54-53, 93-01-06 |
|
|
2 |
Дельта-ТМ |
Научно-исследовательский институт измерений, автоматизации, информационных технологий (НИИАИТ), г. Пенза, ул. Гладкова, д. 1 |
|
|
3 |
КОМПАС ТМ 2.0 |
350010, г. Краснодар, ул. Зиповская, д. 5, АЩЗТ «ЮГ-СИСТЕМА», 54-78-06, 54-91-69, ф. 54-78-06. 121869, Москва, Бережковская наб., д. 16, корп. 2, АО «Электроналадка», (095) 240-54-80; 240-93-44, ф. 240-45-79 |
|
|
4 |
ТЕКА |
113405, Москва, Варшавское ш., д. 125, НИИ «Аргон», (095) 319-74-27 |
|
|
5 |
КС-10М |
107086, Москва, ул. Нижняя Красносельская, д. 40, (095) 263-00-48 |
|
|
6 |
СИСТЕЛ |
121614, Москва, а/я 76, ТОО «Системы телеуправления», (095) 916-08-63 |
|
|
7 |
Телеканал-М |
190000, г. Санкт-Петербург, а/я 144, АОЗТ «Системы связи и телемеханики», (812) 213-27-33 |
|
|
8 |
Север-М |
620151, г. Екатеринбург, ул. Горького, д. 33А, офис 41, (3432) 513-177; 591-640. 620075, г. Екатеринбург, ул. Мамина-Сибиряка, д. 145, НПО автоматики, (3432) 569-313; 555-719, 513-177 |
|
|
9 |
МПТК-КП |
195030, г. Санкт-Петербург, ул. Химиков, д. 26, АО «ЗАВОД ЭЛЕКТРОПУЛЬТ», 527-66-40; 527-61-15; 527-62-26 |
|
|
10 |
«Конус» TeleSAFE |
г. Москва, АО «КОНУС», (095) 386-39-27; 202-36-08 |
|
|
11 |
«Конус» PLCDirekt |
г. Москва, АО «КОНУС», (095) 386-39-27; 202-36-08 |
|
|
12 |
«Конус» (Полещук) |
г. Москва, АО «Конус-М», (095) 386-39-27; 138-71-65 |
|
|
13 |
DEP-PL |
113648, Москва, а/я 13, АО «ДЭП», (095) 310-07-81; 310-07-63; 341-01-13 |
|
|
14 |
МСТ (СТЕЛКО) |
105058, Москва, ул. Ткацкая, д. 1, (095) 964-05-82; 962-92-27 |
|
|
15 |
RTU 200 (АВВ) |
111250, Москва, ул. Красноказарменная, д. 12/45, Отдел автоматизированных систем диспетчерского управления Асеа Броун Бовери Лтд. (095) 956-05-44; 234-02-68; 230-60-01 125057, Москва, Ленинградский просп., д. 53, Асеа Броун Бовери Лтд., (095) 564-83-32; 564-82-31 |
|
|
16 |
SMART-КП |
111141, Москва, а/я 476, АОЗТ «РТСофт», (095) 742-68-28; 742-68-29; 465-15-03 |
|
|
17 |
СПРУТ |
610006, г. Киров, Октябрьский пр., д. 24, корп. 1А, ОАО «Отделение разработки систем» (8332) 235-874; 236-666 |
|
Содержание