МИНИСТЕРСТВО
ЭНЕРГЕТИКИ И ЭЛЕКТРИФИКАЦИИ СССР
ГЛАВНОЕ НАУЧНО-ТЕХНИЧЕСКОЕ УПРАВЛЕНИЕ ЭНЕРГЕТИКИ И ЭЛЕКТРИФИКАЦИИ
РЕКОМЕНДАЦИИ
ПО РАЗРАБОТКЕ СИСТЕМ
АВТОМАТИЧЕСКОГО
РЕГУЛИРОВАНИЯ ТЭС
(Технические требования)
СОСТАВЛЕНО Всесоюзным дважды ордена Трудового Краевого Знамени теплотехническим научно-исследовательским институтом им. Ф.Э.Дзержинского (ВТИ), Производственным объединением по наладке, совершенствованию технологии в эксплуатации электростанций и сетей (ПО "Союзтехэнерго"), Атомтеплоэлектропроектом (АТЭП)
ИСПОЛНИТЕЛИ Н.И. ДАВЫДОВ (ВТИ), Л.Н. КАСЬЯНОВ (ПО "Союзтехэнерго"), М.Д. ТРАХТЕНБЕРГ (АТЭП)
Обобщены и дополнены разрозненные материалы, затрагивающие технические требования к системам автоматического регулирования энергоблоков ТЭС [1 - 4] .
Приведены основные характеристики оборудования отечественных энергоблоков и требования к нему, определяемые условиями его автоматизации; сформулированы общие задачи автоматического регулирования энергоблока в целом и входящего в его состав тепломеханического оборудования, а также требования к показателям качества регулирования; изложены наиболее существенные требования к техническим средствам, предназначенным для решения задач авторегулирования, в том числе к микропроцессорным средствам.
Настоящие Рекомендации могут быть полезны для разработчиков тепломеханического оборудования энергоблоков ТЭС, его регулирующих органов, систем его автоматического регулирования и реализующих их технических средств.
В подготовке разд. 1 и 2 приняли участие инженеры ПО "Союзтехэнерго" В.Г.Михальченко и Ю.А.Метальников.
1.
ХАРАКТЕРИСТИКИ ОБОРУДОВАНИЯ И РЕЖИМОВ РАБОТЫ
МОЩНЫХ ЭНЕРГОБЛОКОВ
1.1. Требования к системе автоматического регулирования (АР) энергоблоков в значительной мере определяются применяемым в составе энергоблока оборудованием, тепловой схемой энергоблока и режимами его работы.
Настоящие рекомендации распространяются на отечественные ТЭС, оснащенные энергоблоками мощностью 200, 300, 500, 800 и 1200 МВт с конденсационными турбинами. Энергоблоки мощностью 200 МВт рассчитаны на докритические параметры пара перед турбиной: давление 13 МПа, температуру 540/540 °С, а энергоблока мощностью 300-1200 МВт - на закритические параметры пара: давление 24 МПа и температуру 540/540 °С. Часть энергоблоков мощностью 200 и 300 мВт ранних выпусков выполнена по схеме дубль-блока (два котла, одна турбина), остальные энергоблоки имеют схему моноблока.
1.2. Тепловые и пусковые схемы энергоблоков унифицированы по типам и составу оборудования и укрупнено могут быть разбиты на следующие основные узлы:
- котельная установка;
- турбина;
- конденсатор и система регенерации турбины;
- питательно-деаэраторная установка;
- общеблочное вспомогательное оборудование;
- электрическое оборудование энергоблока (генератор, трансформатор, трансформаторы собственных нужд и др.).
Ниже приведены некоторые характеристики указанных узлов оборудования, влияющие на их автоматизацию. Вопросы регулирования электротехнического оборудования энергоблока (напряжения, возбуждения и др.) в данной работе не рассматриваются.
1.3. Котельные установка имеют П или Т-образную компоновку.
Энергоблоки докритических параметров (200 МВт) оснащаются как прямоточными, так и барабанными котлами, а закритических параметров - только прямоточными котлами.
Прямоточные котлы имеют по два независимых водопаровых тракта (потока) с возможностью раздельного регулирования подачи воды в каждый из них о помощью своего регулирующего клапана. На каждом из потоков предусматривается установка встроенного растопочного узла, двух или трех впрыскивающих охладителей для регулирования температуры пара и пускового впрыска на выходе из котла.
Встроенный растопочный узел включает в себя задвижку, встроенную в водопаровой тракт; сепаратор, установленный на байпасе встроенной задвижки, и регулирующие дроссельные клапаны на входе в сепаратор и на линиях, отводящих из него воду и пар.
На некоторых котлах (например, энергоблоков 800 МВт) пароперегревательная часть каждого из двух водопаровых трактов разветвляется на два подпотока с соответствующим увеличением количества впрыскивающих охладителей.
Барабанные котлы энергоблоков 200 МВт имеют один регулируемый лоток до барабана и двух- или четырехпоточный пароперегреватель (в зависимости от количества котлов в энергоблоке и компоновки котла).
Для регулирования питания предусматриваются три параллельно включенных питательных клапана Dу 50, 100 и 250 мм, первый из которых (наименьший) используется для заполнения котла водой, средний - для регулирования уровня в барабане при пуске, третий - для регулирования в нормальных режимах.
Регулирование температуры пара осуществляется аналогично прямоточным котлам двумя или тремя впрыскивающими охладителями. Для впрыска используется собственный конденсат котла, а при пуске - питательная вода. Пусковые впрыски в паропроводы на выходе из котла на барабанных котлах не предусматриваются.
Все рассматриваемые энергоблоки имеют один промежуточный перегрев пара, для регулирования температуры которого применяются паропаровые теплообменники либо байпасируемые регулировочные поверхности.
Для защиты от недопустимых повышений температуры пара промперегрева предусматриваются впрыскивающие пароохладители в рассечке промежуточного пароперегревателя.
В пусковых схемах котлов для регулирования давления воды, поступающей на впрыски, предусматриваются устройства "постоянного расхода", состоящие из набора дроссельных шайб и регулирующего клапана на линии сброса питательной воды в деаэратор.
По видам сжигаемого топлива и системам топливоприготовления котельные установки разделяются на:
- сжигающие газообразное и жидкое топливо (газ, мазут);
- пылеугольные с промбункером пыли:
- пылеугольные с системами пылеприготовления прямого вдувания (с молотковыми или среднеходными мельницами, мелящими вентиляторами).
Подача твердого топлива в котлы с промбункером регулируется изменением частоты вращения лопастных питателей пыли, которые оснащаются электродвигателями постоянного тока.
На котлах с прямым вдуванием подача топлива в мельницы регулируется изменением частоты вращения электродвигателей постоянного тока питателей сырого угля (скребковых, ленточных).
Для регулирования частоты вращения электродвигателей постоянного тока применяются тиристорные станции бесступенчатого регулирования, изменяющие напряжение питания регулируемых электродвигателей.
В качестве растопочного топлива на всех пылеугольных котлах используется мазут.
Большинство рассматриваемых котлов рассчитано на работу при уравновешенной тяге и оборудуется, как правило, двумя дымососами и двумя дутьевыми вентиляторами, подача которых регулируется с помощью направляющих аппаратов.
На некоторых энергоблоках мощностью 300 и 800 мВт с газомазутными котлами предусмотрена работа котлов под наддувом с полным исключением дымососов или установкой дымососов пониженной мощности.
Приводом для дымососов и дутьевых вентиляторов, а также других тягодутьевых машин (дымососов рециркуляции, мельничных вентиляторов) служат асинхронные электродвигатели. Исключение составляют энергоблоки 800 МВт, где для дутьевых вентиляторов используется турбопривод и регулирование расхода воздуха осуществляется изменением частоты вращения приводных турбин.
1.4. Турбины энергоблоков 200 - 800 МВт одновальные, многоцилиндровые, с нерегулируемыми отборами пара и сопловым парораспределением, а энергоблоков 1200 МВт - с дроссельным парораспределением.
Система регулирования турбин рассматриваемых энергоблоков гидравлическая, неравномерность регулирования около 4,5 %. Турбины всех типов в большей или меньшей мере оснащаются устройствами электрической части системы регулирования (ЭЧСР), которые в простейшем случае обеспечивают быструю разгрузку турбины при действии энергосистемной противоаварийной автоматики, а на турбинах 800 МВт, кроме того, выполняют значительную часть функций системы регулирования мощности энергоблока.
Управление частотой вращения турбины при пуске и мощностью после включения генератора в сеть осуществляется с помощью механизма управления турбины (МУТ), представляющего собой электродвигатель со временем перемещения в пределах неравномерности 45 - 60 с.
Расход пара на уплотнения турбины, поступающего из нерегулируемого отбора или постороннего источника, регулируется одним клапаном.
1.5. Конденсатор и система регенерации турбины включают в себя конденсатор (или два параллельных конденсатора) для конденсации отработавшего пара и подогревателя системы регенеративного подогрева конденсата.
Удаление конденсата из конденсатора турбины осуществляется конденсатными насосами, а уровень в конденсаторе регулируется клапаном, установленным на стороне их нагнетания. При пусках насосы работают в режиме рециркуляции и уровень поддерживается другим клапаном, установленным на линии рециркуляции.
Регенеративный подогрев конденсата и питательной воды осуществляется соответственно в четырех- пяти подогревателях низкого давления (ПНД) и трех подогревателях высокого давления (ПВД). Уровень конденсата греющего пара, поступающего из нерегулируемых отборов турбины, в подогревателях поддерживается регулирующими клапанами, установленными на выходе из этих подогревателей, а также клапаном на стороне нагнетания перекачивающего насоса.
1.6. Все энергоблоки оснащаются питательно-деаэраторными установками - питательными насосами и деаэраторами с рабочим давлением 0,7 МПа (на энергоблоках 200 МВт - 0,6 МПа), питаемыми в нормальных условиях греющим паром от отборов турбины, а при пусках и аварийных разгрузках - от паропроводов собственных нужд. Для регулирования давления в деаэраторе на соответствующих паропроводах устанавливаются регулирующие клапаны. Уровень в деаэраторе регулируется путем изменения добавки конденсата в конденсатор турбины.
Питательная установка энергоблока 200 МВт состоит из двух или трех питательных электронасосов (ПЭН), один из которых является резервным; энергоблока 300 МВт - из двух питательных насосов (пускорезервного электронасоса, снабженного гидромуфтой и обеспечивающего до 60 % номинальной производительности энергоблока, и основного насоса с турбоприводом, позволяющего за счет изменения частоты вращения регулировать производительность в пределах 50 - 100 % при работе энергоблока на номинальном давлении и 30 - 100 % при работе энергоблока на скользящем давлении); энергоблоков 500 и 800 МВт - из двух питательных турбонасосов подачей 50 % номинального расхода энергоблока каждый. Конденсационные приводные турбины этих насосов питаются паром от одного из отборов основной турбины, а при пусках и в аварийных режимах - от пуско-сбросных устройств собственных нужд энергоблока.
1.7. Общеблочное вспомогательное оборудование включает в себя пуско-сбросные устройства, редукционно-охладительные установки, сетевые подогреватели, испарители и другое оборудование, определяемое конкретной тепловой схемой энергоблока.
С точки зрения автоматического регулирования наиболее ответственными являются быстродействующие редукционно-охладительные установки (БРОУ), через которые сбрасывается пар из котла в конденсатор турбины при пусках и в аварийных режимах (однобайпасная схема), и БРОУ собственниж нужд, через которые подается пар к питательным насосам на энергоблоках 500, 800 и 1200 МВт.
Паровые дроссельные клапаны БРОУ обоих типов должны оснащаться мощным электроприводом, обеспечивающим требуемое быстродействие (время полного открытия 10 - 15 с). Охлаждение дросселированного пара осуществляется с помощью впрыска.
1.8. Режимы работы энергоблоков охватывают режимы нормальной эксплуатации в регулировочном диапазоне нагрузок, пусковые и аварийные режимы.
При нормальной эксплуатации характер изменения нагрузки отдельных энергоблоков определяется рядом факторов, в частности, типом и маневренными характеристиками оборудования, видом сжигаемого топлива, электрическими связями электростанции, характером нагрузки в энергосистеме и др.
Большинство мощных энергоблоков работает в режиме изменения нагрузки по диспетчерскому графику: номинальная (заданная) нагрузка в дневные и вечерние часы, минимальная - ночью.
Часть энергоблоков, главным образом с газомазутными котлами, принимает участие в более глубоком регулировании параметров энергосистемы (участие в подавлении отклонений частоты, регулирование и ограничение мощности в линиях перетока, локализация аварийных режимов в энергосистеме) как за счет изменения нагрузки в регулировочном диапазоне, так и за счет останова в ночное время и на нерабочие дни.
Под регулировочным диапазоном нагрузок понимается интервал нагрузок, внутри которого мощность энергоблока может изменяться автоматически без изменения состава основного и вспомогательного оборудования и количества включенных горелочных устройств.
Значение регулировочного диапазона зависит от типа оборудования энергоблока, вида сжигаемого топлива и других факторов. Так, при работе на газе или мазуте значение регулировочного диапазона должно составлять 50 - 70 % номинальной мощности, а при работе на твердом топливе - 20 - 50 %.
Для энергоблоков 300 - 800 МВт, работающих на закритических параметрах пара, характерным является комбинированный режим поддержания давления пара перед турбиной, обеспечивающий существенное повышение экономичности работы энергоблока.
Этот режим предусматривает работу энергоблока в диапазоне нагрузок 100 - 70 % при номинальном давлении свежего пара перед турбиной и регулирование нагрузки клапанами турбины. При нагрузках менее 70 % клапаны турбины, подводящие пар к двум из четырех групп сопл, остаются полностью открытыми, остальные - полностью закрытыми и нагрузка регулируется путем изменения давления свежего пара перед турбиной. Такой режим требует выполнения системы регулирования с автоматически перестраиваемой структурой.
Пусковые режимы энергоблоков с прямоточными котлами предусматривают пуск по сепараторной схеме - водопаровой тракт котла при пуске разделяется встроенными задвижками на испарительную часть, в которой поддерживается давление, близкое к номинальному, и на перегревательную часть, работающую с переменным давлением пара. Пар в перегревательные поверхности нагрева поступает из встроенного сепаратора. Расход питательной воды в этом режиме поддерживается постоянным, как правило, равным 30 % номинального, вплоть до перехода на прямоточный режим. Одновременно с пуском котла ведется прогрев паропроводов, сначала производится сброс пара через БРОУ в конденсатор турбины, а затем разворот и начальное нагружение турбины. В дальнейшем нагрузка турбины повышается по мере повышения параметров пара на котле. Когда давление пара за котлом становится близким к номинальному, встроенные задвижки открываются.
Регулирование подачи топлива в котел, температуры свежего пара и пара промперегрева осуществляется по программам, зависящим от начального теплового состояния оборудования (главным образом, турбины), и ведется в темпе, обеспечивающем допустимые скорости прогрева металла.
Энергоблоки мощностью 200 МВт с барабанными котлами также пускаются на скользящем давлении. Дополнительным фактором, ограничивающим темп пуска на этих энергоблоках, является скорость и равномерность прогрева барабана котла, что должно учитываться при формировании программ пуска. Температура пара при пуске энергоблоков с барабанными котлами поддерживается теми же впрыскивающими охладителями, которые работают в нормальных режимах.
2. ТРЕБОВАНИЯ К ОБОРУДОВАНИЮ И
РЕГУЛИРУЮЩИМ ОРГАНАМ,
ОПРЕДЕЛЯЕМЫЕ УСЛОВИЯМИ АВТОМАТИЗАЦИИ
2.1. Для повышения надежности работы и упрощения системы АР энергоблока его оборудование и тепловая схема должны удовлетворять ряду требований, основные из которых следующие:
- тепловая схема и оборудование энергоблока должны выполняться таким образом, чтобы автоматическое управление ими осуществлялось с использованием минимального числа органов управления. В частности, следует по возможности сокращать количество вспомогательных механизмов, используемых для решения общих задач авторегулирования; уменьшать количество охладителей для регулирования температуры на общем потоке; исключить необходимость регулирования соотношения "топливо-воздух" на каждую горелку;
- каждый регулирующий орган должен влиять, главным образом, на изменение того параметра, для регулирования которого он предназначен, и оказывать малое влияние на другие регулируемые параметры. Так, например, в двухпоточных прямоточных котлах не следует выполнять переброс потоков с одной половины по ширине котла на другую, так как это затрудняет возможность компенсации тепловых перекосов путем перераспределения потоков воды;
- регулирующее воздействие должно влиять на регулируемый параметр с возможно меньшей инерционностью по сравнению с возмущающими воздействиями. Исходя из этого условия должны, в частности, выбираться места размещения охладителей для регулирования температуры пара; пылеприготовительные установки, выполненные по схеме прямого вдувания и обладающие значительной инерционностью, должны предусматривать возможность динамической форсировки выноса пыли из мельниц для компенсации их инерционности при регулировании подачи топлива;
- регулирование нагрузки в пределах регулировочного диапазона должно обеспечиваться за счет воздействия на регулирующие органы подачи топлива без изменения количества находящихся в работе топливоподающих устройств (цитаделей, горелок);
-
для обеспечения необходимой приемистости энергоблока в аварийных режимах при
открытии клапанов турбины на 30 % полного хода с одновременным воздействием на
органы управления нагрузки котла показатель приемистости  -
(где Δ N и Δ Nуст - текущее и
-
(где Δ N и Δ Nуст - текущее и
установившееся отклонение мощности энергоблока; t - время от момента подачи сигнала на открытие клапанов) в зависимости от времени должен изменяться следующим образом:
|
t с |
1 |
5 |
30 |
90 |
150 |
|
П |
0,2 |
0,35 |
0,5 |
0,6 (0,5) |
0,7 (0,6) |
Примечание. В скобках указаны значения для пылеугольных котлов;
- динамические свойства энергоблока, связанные с поддержанием давления пара перед турбиной за счет воздействия на органы управления нагрузкой котла и клапаны турбины, должны быть таковы, чтобы при одновременном скачкообразном воздействии на оба указанных регулирующих органа на значение, соответствующее изменению нагрузки блока на 10 %, максимальное отклонение давления пара не превышало допустимые пределы, установленные для энергоблока по условиям надежности;
- в диапазоне регулируемых нагрузок в нормальном (не аварийном) режиме эксплуатации энергоблоки должны допускать изменение мощности без ограничения скорости в пределах ± 7 % номинального значения для энергоблоков сверхкритического давления и ± 10 % для энергоблоков докритического давления. Сверх этих пределов скорость изменения нагрузки энергоблока в том же направлении ограничена значением 0,3 %/мин для энергоблоков сверхкритического давления и 0,5 %/мин для энергоблоков докритического давления;
- для плановых изменений нагрузки (2 - 3 раза в сутки) в диапазоне регулируемых нагрузок энергоблоки должны допускать изменение мощности на ± 20 % номинальной мощности для энергоблоков сверхкритического давления и на ± 25 % для энергоблоков докритического давления, со скоростью до 4 %/мин для энергоблоков с газомазутными котлами и до 2 %/мин для энергоблоков с пылеугольными котлами.
При дальнейшем изменении нагрузки в том же направлении должно допускаться изменение мощности со скоростью не менее 0,7 %/мин для энергоблоков сверхкритического давления и 1 %/мин для энергоблоков докритического давления.
2.2. Основные требования к регулирующим органам:
- диапазоны регулирования должны выбираться с запасом в обоих направлениях по отношению к диапазону, определяемому из условий статических режимов, для обеспечения необходимого динамического перерегулирования.
Эти запасы, в частности, должны составлять: по расходу топлива - по 10 % в обоих направлениях; по тяге и дутью - по 5 % в обоих направлениях; по расходу питательной воды - 5 % в направлении максимума и 10 % в направлении минимума; по температуре пара промперегрева - 10 - 15 °С при номинальной нагрузке. Максимальный расход воды на охладители свежего пара должен в два раза превышать расчетное (статическое) значение.
Регулировочные характеристики питательных насосов в моноблочных установках с прямоточными котлами должны обеспечивать возможность регулирования общего расхода питательной воды во всем диапазоне регулирования при использовании регулирующих питательных клапанов на потоках для распределения расходов воды по потокам при минимальном дросселировании;
- регулирующие органы в пределах регулировочного диапазона должны иметь, как правило, линейные характеристики с различием между крутизной в разных точках характеристики, не превышающим 1,5.
Для тех участков регулирования, динамические свойства которых зависят от положения регулирующего органа, должны предусматриваться криволинейные характеристики, компенсирующие влияние изменяющейся динамики объекта автоматического регулирования;
- в целях упрощения системы регулирования характеристики отдельных регулирующих органов должны по возможности выбираться с учетом использования этих органов для автоматического регулирования в пусковых режимах;
- перестановочные усилия для привода регулирующих органов должны быть примерно одинаковыми в обоих направлениях;
- пропуск регулирующих органов в закрытом положении должен быть минимальным и должен сохраняться практически неизменный в течение всего межремонтного периода. Допустимое значение пропуска при закрытом регулирующем органе определяется техническими требованиями конкретных контуров регулирования.
2.3. Исполнительные механизмы для привода регулирующих органов должны быть предназначены для работы при:
- температуре окружающего воздуха от - 30 до + 50 °С;
- относительной влажности до 98 % при температуре 35 °С;
- вибрации с частотой до 25 Гц и амплитудой 1 мм:
- наличии в окружающей среде пыли и брызг воды.
Питание исполнительных механизмов должно осуществляться переменным током напряжением 380/220 В частотой 50 ± 1 Гц или 415/240 В частотой 60 ± 1 Гц. Допустимые отклонения напряжения питания от + 10 до – 15 %.
Исполнительные механизмы должны иметь следующие основные характеристики:
- время полного хода выбирается из нормального ряда в диапазоне от 25 до 160 с:
- люфт не более 1 %
- выбег выходного вала при сопутствующей нагрузке 50 % номинальной не более 0,5 % при времени полного хода до 40 с и не более 0,25 % при времени полного хода 63 с и более.
3. ТРЕБОВАНИЯ К
ОБЪЕМУ И КАЧЕСТВУ
АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ
3.1. Основными задачами САР энергоблока являются (см. рис 1) регулирование:
- мощности энергоблока в соответствии с требованиями энергосистемы;
- внутриблочных технологических процессов и параметров, обеспечивающее надежную и экономичную работу энергоблока в регулировочном диапазоне нагрузок;
- в пусковых режимах.
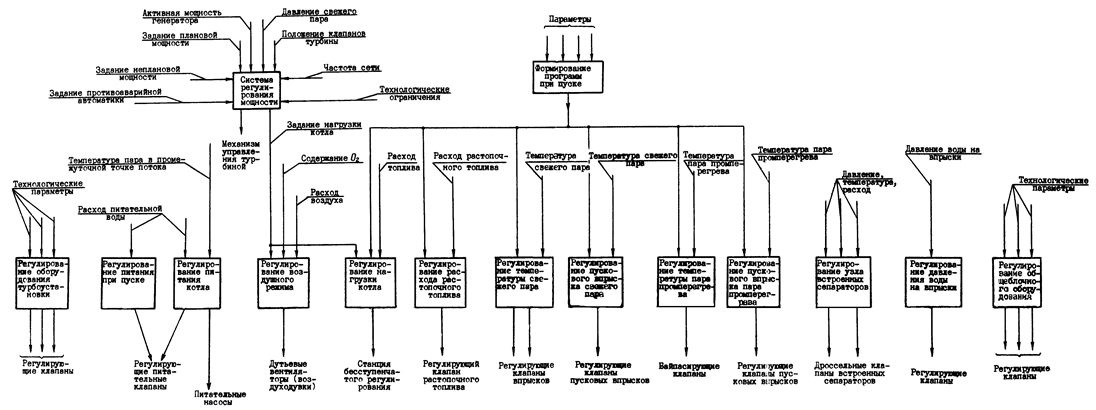
Рис 1. Обобщенная структурная схема АР энергоблока с прямоточным котлом
3.2. Автоматическое регулирование мощности является наиболее сложной и многообразной задачей в системе регулирования энергоблока.
Это обусловлено, о одной стороны, энергосистемными требованиями к маневренным характеристикам энергоблока, определяющими качество отработки энергоблоком изменение мощности при изменении задания, а также необходимостью взаимодействия с энергосис-темными устройствами противоаварийной автоматики, с другой - необходимостью учета при регулировании мощности внутриблочных требований по поддержанию давления пара перед турбиной или положения клапанов турбины при работе на скользящем давлении, появлением технологических ограничений, препятствующих требуемым изменениям мощности в широких пределах (ограничений по расходу топлива или воздуха, исчерпанием диапазонов регулирования и др.), действием технологических защит при возникновении аварийных ситуаций и др.
В соответствии с указанными требованиями система АР мощности должна обеспечить:
- изменение активной мощности до заданного значения о заданной скоростью (плановые изменения мощности))
- изменение активной мощности в соответствии с изменением задания, носящим случайный характер (неплановые изменения мощности) ;
- изменение активной мощности при отклонении частоты в сети за заданные пределы в соответствии с установленной статической характеристикой "частота - мощность;
- взаимодействие с устройствами противоаварийной автоматики в переход на послеаварийный уровень мощности, задаваемый противоаварийной автоматикой;
- поддержание заданных значений давления свежего пара перед турбиной или положения регулирующих клапанов турбины с разрешением дозированных динамических отклонений указанных параметров в целях повышения приемистости энергоблока;
- предотвращение понижения давления свежего пара перед турбиной ниже минимально допустимого уровня;
- предотвращение недопустимых термических напряжений в деталях турбины за счет соответствующего ограничения темпа изменения мощности энергоблока;
- минимальное рассогласование между заданным в фактическим значением мощности в случае возникновения технологических ограничений с сохранением при этом основных технологических параметров энергоблока в допустимых пределах;
- перевод энергоблока на заданное значение нагрузки при действии внутриблочных (технологических) защит.
В процессе выполнения перечисленных функций система АР мощности должна воздействовать на мощность турбины, устанавливать задание регуляторам нагрузки котла, осуществлять обработку аналоговой и дискретной информации, поступающей от устройств противоаварийной автоматики, регуляторов котла и турбины, и в случае необходимости изменять свою структуру.
3.3. Регулирование внутриблочных технологических процессов обеспечивается значительным количеством автоматических регуляторов.
В зависимости от мощности энергоблока, планируемых режимов его работы, вида сжигаемого топлива, особенностей тепловой схемы и оборудования, принятых способов регулирования и других факторов количество контуров регулирования на разных энергоблоках колеблется от 50 до 100.
С позиций АР на энергоблоке могут быть выделены следующие основные участки регулирования:
- подачи топлива в котел;
- газовоздушного режима котла;
- подачи питательной вода;
- температуры свежего пара;
- температуры пара промперегрева
- параметров вспомогательного оборудования турбоустановки;
- параметров общеблочного вспомогательного оборудования.
Регулирование подачи топлива определяющее нагрузку котла, осуществляется в соответствии с заданием, поступающим от системы регулирования мощности, и должно обеспечить поддержание заданной мощности энергоблока.
Регулятор топлива устанавливает подачу топлива в котел, воздействуя в зависимости от вида сжигаемого топлива на регулирующие клапаны (газ, мазут) или станции бесступенчатого регулирования питателей пыли или сырого угля.
На котлах с молотковыми и среднеходными мельницами регулятор топлива в некоторых случаях управляет подачей топлива не непосредственно, а через индивидуальные регуляторы загрузки мельниц. Последние, воздействуя на соответствующие питатели сырого топлива, поддерживают задаваемую регулятором топлива загрузку мельниц; в случае необходимости эти регуляторы позволяют перераспределить нагрузку между отдельными мельницами.
Регулирование газовоздушного режима котла включает в себя автоматическое регулирование подачи воздуха в котел и разрежения в верхней части топки (последнее - на котлах с уравновешенной тягой).
Подача воздуха в котел устанавливается регулятором в соответствии с нагрузкой котла, обеспечивая оптимизацию процесса сжигания топлива. Расход воздуха регулируется воздействием на направляющие аппараты дутьевых вентиляторов (или на частоту вращения турбовоздуходувок), и его значение автоматически корректируется по содержанию свободного кислорода в дымовых газах. Разрежение в топке поддерживается регулятором разрежения, воздействующим на направляющие аппараты дымососов.
Задачи регулирования подачи питательной воды для барабанных и прямоточных котлов существенно различны.
На барабанных котлах АР питания осуществляется трехимпульсным регулятором уровня в барабане котла, воспринимающим сигналы по расходам пара, воды, уровню и воздействующим на регулирующий клапан на линии подачи воды в котел.
Основной задачей АР питания прямоточных котлов является поддержание заданного состояния среды (обычно температуры) в промежуточном сечении водопарового тракта котла на каждом из потоков. Кроме того, при регулировании питания должны решаться и дополнительные задачи: распределение расхода между потоками, минимальное дросселирование потоков в регулирующих питательных клапанах и др. Необходимый расход питательной воды на прямоточных котлах устанавливается регулятором питания путем изменения подачи питательных насосов с обеспечением заданного соотношения между их подачами, а распределение расходов по потокам водопарового тракта производится регулирующими питательными клапанами котла, одна из которых находится в положении полного открытия для снижения потерь на дросселирование.
Регулирование температуры свежего пара на каждом из потоков ведется двумя или тремя регуляторами (в зависимости от количества пароохладителей) путем изменения расхода воды, поступающей в соответствующий пароохладитель. Регуляторы выполняются по двухконтурной схеме с опережающим сигналом по температуре пара за впрыском. Кроме того, для обеспечения необходимого диапазона регулирования регулятор, стоящий ближе к выходу из котла, в случае необходимости корректирует в требуемом направлении заданное значение температуры регулятору, стоящему перед вам.
Регулирование температуры пара промперегрева также выполняется по двухконтурной схеме с воздействием на соответствующие регулирующие органы.
Неблагоприятная динамика объекта приводит нередко к необходимости применения ПИД-закона регулирования и использования дополнительных опережающих сигналов по возмущениям.
Регулятор аварийного впрыска настраивается на поддержание температуры несколько большей, чем номинальная; в связи с этим он находится в режиме ожидания и вступает в работу только при повышении температуры пара промперегрева выше установленного значения.
Регулирование параметров вспомогательного оборудования турбоустановки (давления пара, поступающего на лабиринтовые уплотнения турбины; уровня в конденсаторе и регенеративных подогревателях, температуры масла за маслоохладителями) обеспечивается простыми регуляторами, воздействующими на соответствующие регулирующие клапаны. При этом регуляторы уровня, как правило, выполняются статическими (с жесткой обратной связью по положению регулирующего органа).
Регулирование параметров общеблочного вспомогательного оборудования (давления и уровня в деаэраторе, давления и температуры редукционно-охладительных установок, испарительных установок и др.) обеспечивается регуляторами, отличающимися в большинстве случаев простой структурой, а их количество определяется конкретной тепловой схемой энергоблока.
3.4. Автоматическое регулирование в пусковых режимах носит специфический характер, что обусловлено необходимостью выполнения в процессе пуска не только регулирования аналоговых технологических параметров (расхода, давления, температуры и др.), но и выполнением ряда дискретных операций для обеспечения нормального функционирования автоматических регуляторов в условиях изменяющихся характеристик объектов управления, возникновения технологических ограничений, изменения состава работающего оборудования и др.
Таким образом, решение задач регулирования в пусковых режимах требует применения комбинированных аналого-дискретных систем.
Характерными особенностями режимов пуска, оказывающими влияние на структуру системы автоматизации пусковых режимов, являются:
- изменение в процессе пуска технологических схем;
- необходимость перехода с одних регулирующих органов на другие;
- существенные изменения условий работы регулирующих органов в процессе пуска;
- значительные изменения статических и динамических характеристик регулируемых участков.
Особенностью АР при пуске является также необходимость программного изменения заданных значений для ряда регулируемых параметров. При этом программы могут быть заданы либо в виде заранее определенных зависимостей от некоторых исходных тепловых состояний энергоблока и времени, либо формироваться на базе математических моделей с использованием непосредственных измерений параметров текущего теплового состояния оборудования энергоблока.
В обоих случаях возникновение технологических ограничений должно сопровождаться приостановок реализации программы и стабилизацией регулируемых параметров на достигнутом уровне.
В процессе пуска на энергоблоках с прямоточными котлами системой пусковой автоматики должны решаться следующие основные задачи:
- увеличение тепловой нагрузки котла по заданной программе; при этом на котлах, работающих на твердом топливе, должно быть предусмотрено регулирование растопочного и основного топлива и автоматической переход на основное топливо на соответствующих этапах пуска;
- регулирование тягодутьевого режима в соответствии с режимом увеличения тепловой нагрузки котла;
- поддержание растопочного расхода питательной воды в каждом из водопаровых трактов котла до выхода на прямоточный режим и регулирование заданного соотношения "топливо - вода" на последующих этапах пуска;
- подъем температуры свежего пара и пара промперегрева по заданным программам;
- поддержание заданного давления среды перед встроенными задвижками в котле до их открытия;
- регулирование сброса среды из встроенных сепараторов с минимальным количеством пара в сбрасываемой среде вплоть до выхода на прямоточный режим;
- поддержание номинального давления свежего пара перед турбиной после открытия встроенных задвижек до окончания процесса пуска;
- регулирование давления воды, подаваемой на впрыски.
На энергоблоках с барабанными котлами задачи АР при пуске такие же, как и на прямоточных котлах (за исключением регулирования, связанного с узлом встроенных сепараторов).
По-иному ведется на барабанных котлах регулирование подачи питательной воды в котел, которая устанавливается пусковым регулятором уровня, учитывающим изменения давления в барабане и связанное с этим изменение плотности воды; по другим критериям формируются на барабанных котлах и программы повышения нагрузки и параметров пара.
Регулирование в процессе пуска осуществляется как штатными (работающими в нормальных режимах), так и специальными пусковыми регуляторами, которые отключаются по окончании соответствующих этапов пускаю Кроме того, в систему автоматики пуска входят устройства, формирующие программы изменения параметров и дискретные команды, необходимые для нормальной работы автоматики в пусковых режимах.
3.5. Качество АР при решении перечисленных выше задач АР энергоблока должно удовлетворять ряду общих требований, а также требованиям, регламентированным техническими условиями на соответствующее оборудование, нормативными и другими документами.
Общим требованием ко всем контурам АР является их устойчивая работа (отсутствие автоколебаний) в пределах регулировочного диапазона, а для пусковых регуляторов - в пусковых режимах.
Для регуляторов с импульсным (релейным) выходом частота включений должна быть ограничена и при неизменном значении заданной нагрузки в среднем не должна превышать 6 включений в минуту.
В качестве показателей качества АР отдельных параметров принимаются:
- максимальное отклонение регулируемого параметра под влиянием случайно действующих эксплуатационных возмущений при неизменном значении заданной нагрузки σэ макс;
-
максимальное отклонение регулируемого параметра σмакс и
интегральный квадратичный критерий ![]() при скачкообразном изменении
заданного значения нагрузки на 10 %.
при скачкообразном изменении
заданного значения нагрузки на 10 %.
Показатели качества регулирования основных общеблочных параметров - мощности турбогенератора, давления свежего пара перед турбиной (в режиме постоянного давления) или положения регулирующих клапанов турбины (в режиме скользящего давления) - в пределах регулировочного диапазона должны быть не хуже значений, приведенных в табл.1.
|
Параметр |
σ э макс, % |
σ макс, % |
I1 (%)2∙c |
Примечание |
|
Активная мощность турбогенератора |
± 3 |
- |
1500 |
При участии энергоблока в регулировании энергосистемных параметров |
|
- |
12000 |
При стабилизации давления пара перед турбиной |
||
|
Давление свежего пара перед турбиной |
± 2 |
- |
1000 |
Для энергоблоков с барабанными котлами |
|
- |
2000 |
Для энергоблоков с прямоточными котлами |
||
|
Положение регулирующих клапанов турбины |
± 2 |
± 5 |
2000 |
В режиме скользящего давления |
Показатели качества регулирования основных параметров котла в пределах регулировочного диапазона нагрузок от 70 до 100 % должны быть не более значений, приведенных в табл.2.
|
Параметр |
σ э макс |
σ макс |
I1 |
|
Уровень в барабане котла |
± 20 мм |
± 50 мм |
- |
|
Температура свежего пара на выходе из котла |
± 6 °С |
± 8 °С |
5000 (°С)2∙с |
|
Температура пара промперегрева на выходе из котла |
± 6 °С |
± 10 °С |
10000 (°С)2∙с |
|
Содержание свободного кислорода в дымовых газах: |
|
|
|
|
для котлов, работающих на мазуте с малыми избытками воздуха |
± 0,2 % |
± 0,3 % |
10 (%)2∙с |
|
для котлов, работающих без поддержания малых избытков воздуха |
± 0,5 % |
± 1 % |
200 (%)2∙с |
|
Разрежение в верхней части топки котла |
± 20 Па (2 кгс/м2) |
±30 Па (3 кгс/м2) |
- |
Максимальные отклонения (σэ.макс) основных регулируемых параметров вспомогательных систем турбоустановки в регулировочном диапазоне нагрузок не должны превышать:
- давления пара в коллекторе лабиринтовых уплотнений турбины ± 5 кПа (0,05 кгс/см2);
- уровня воды в конденсаторе турбины ± 150 мм;
- уровня конденсата греющего пара в регенеративных подогревателях ± 150 мм;
- давления в деаэраторе ±20 КПа (0,2 кгс/см2);
- уровня воды в деаэраторе ± 200 мм.
В пусковых режимах максимальные отклонения параметров по отношению к заданным по программам пуска должны быть:
- расхода питательной воды по каждому из водопаровых потоков не более ± 10 % заданного:
- температуры свежего и пара промперегрева - не более ± 20°С.
4. ТРЕБОВАНИЯ К
ТЕХНИЧЕСКИМ СРЕДСТВАМ
АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ
4.1. Реализация перечисленных выше задач АР должна осуществляться с помощью комплекса технических средств, обеспечивающих формирование команд управления регулирующими органами в соответствии с заданной структурой системы АР и значением измеренных технологических параметров объектов управления.
4.2. Система АР может выполняться:
- на базе набора приборов (блоков, модулей), входящих в комплект аппаратуры, предназначенной специально для решения задач АР;
- на базе средств микропроцессорной техники (микро-ЭВМ, микропрограммируемых контроллеров);
- в виде комбинированной системы, состоящей из средств микропроцессорной техники и из отдельных блоков аппаратуры АР.
4.3. Ввод в систему АР информации о значениях технологических параметров и положении регулирующих органов, как правило, должен осуществляться от общепромышленных первичных и измерительных преобразователей с унифицированным выходным сигналом следующих параметров:
а) выходной сигнал - унифицированный сигнал постоянного тока с полным диапазоном изменения в пределах 0-5 мА; 0-20 мА; 4-20 мА; 0-10 В и с уровнем пульсаций не более 0,5 %;
б) сопротивление нагрузки:
- не более 2,5 к0м для выходного сигнала 0-5 мА;
- не более 1,0 к0м для выходного сигнала 0-20 и 4-20 мА;
- не менее 2,0 к0м для выходного сигнала 0-10 В;
в) основная погрешность ± 0,5, ± 1,0 или ± 1,5 %. Выбор типа первичного преобразователя определяется необходимой точностью поддержания регулируемого параметра;
г) время вхождения выходного сигнала в зону допускаемой основной погрешности (быстродействие) при скачкообразном изменении входного сигнала на 100 % не должно превышать 1,5 с. Указанное время не учитывает инерционности собственно измерителя (термоэлектрического преобразователя, устройств газового анализа и др.), которая определяется конструкцией конкретных технических средств и должна быть по возможности минимальной;
д)
питание должно осуществляться от сети переменного тока напряжением (![]() ) В с
частотой 50 ±1 Гц;
) В с
частотой 50 ±1 Гц;
е) выходные цепи гальванически отделены от цепей питания и входных цепей;
ж) работа при температуре окружающей среды от 5 до 60 °С, относительной влажности 30-80 % и не более 98 % при температуре до 35 °С, атмосферном давлении от 84 до 106 кПа (от 630 до 800 мм рт. ст.) и вибрации частотой до 25 Гц и амплитудой до 0,1 мм;
з) показатели надежности:
- вероятность безотказной работы за 2000 ч не менее 0,98;
- среднее время восстановления не более 1,5 ч;
- средний срок службы не менее 10 лет.
4.4. Комплект блоков (модулей) АР должен включать в себя устройства для статического и динамического преобразования поступающих в них сигналов, позволяющие:
- принять информацию от первичных и измерительных преобразователей, связанных с объектами управлениями от других блоков системы;
- произвести необходимую статическую и динамическую обработку поступивших сигналов с помощью одного или нескольких соединенных между собой блоков;
- выдать команды (сигналы) на исполнительные механизмы и устройства индикации в соответствии с принятой структурой системы АР;
- изменять параметры статической и динамической настройки и структуру системы при изменении соответствующих дискретных и (или) аналоговых входных сигналов;
- позволять оператору-технологу энергоблока производить ручное (дистанционное) изменение заданных значений регулируемых параметров и отключение (включение) каждого из регуляторов и осуществлять ручное (дистанционное) управление исполнительными механизмами отключенных регуляторов.
В состав блоков (модулей) должны входить следующие блоки;
- регулирующий с непрерывным (аналоговым) выходным сигналом, реализующий П -, ПИ- и ПИД - законы регулирования;
- регулирующий с импульсным (трехпозиционным) выходным сигналом, реализующий ПИ- и ПИД - законы регулирования совместно с исполнительным механизмом с постоянной скоростью;
- динамического преобразования входного сигнала по заданному настройкой закону;
- интегрирования аналогового или импульсных сигналов;
- алгебраических операций;
- нелинейных преобразований;
- выделения экстремального сигнала;
- аналого-релейного преобразования.
Блоки (модули) имеют следующие параметры:
а) входы блоков, на которые поступает непрерывный (аналоговый) сигнал, должны быть рассчитаны на прием унифицированного сигнала по п. 4.3, а и иметь следующие значения входного сопротивления блоков:
- не более 250 Ом для входного сигнала 0-5 мА;
- не более 80 Ом для входного сигнала 0-20 и 4-20 мА;
- не менее 10 кОм для входного сигнала 0-10 В;
б) выходной сигнал блоков с непрерывным (аналоговым) выходом должен быть унифицированным сигналом с характеристиками по пп. 4.3, а и 4.3, б;
в) входы блоков, рассчитанные на прием дискретных сигналов, должны принимать сигналы в виде замыкания "сухих" контактов и (или) напряжения постоянного тока 24 В;
г) дискретные и импульсные выходные сигналы блоков могут выдаваться в вида:
- замыкания "сухих" контактов;
- замыкания бесконтактного ключа, гальванически отделенного от входных цепей;
- изменения выходного напряжения постоянного тока от 2,4 до 24 В.
Основные характеристики регулирующих блоков:
- диапазон изменения (настройки) коэффициента передачи 0,3-100 (в блоке с импульсным выходом - для времени полного хода исполнительного механизма 100 с);
- диапазон изменения постоянной времени дифференцирования 1-600 с;
- диапазон изменения постоянной времени интегрирования 1-1200 с;
- возможность демпфирования входного сигнала с диапазоном настройки постоянной времени демпфера 0-20 с;
- автоподстройка коэффициента передачи и (или) постоянной времени интегрирования при изменении соответствующих унифицированных входных сигналов или ступенчатое (не менее трех ступеней) изменение этих значений при замыкании "сухих" контактов, подключенных к соответствующим входам;
- диапазон настройки как верхнего, так и нижнего уровней ограничения выходного сигнала в регулирующем блоке с аналоговым выходом 0-100 %;
- диапазон настройки зоны нечувствительности 0,2-2 %;
- диапазон настройки длительности интегральных импульсов в регулирующем блоке с импульсным выходом 0,1-1 с.
Блок динамического преобразования должен осуществлять преобразование входного сигнала по одному из следующих законов, устанавливаемых при настройке: интегральному, дифференциальному, апериодическому, пропорциональному, интегро-дифференциальному.
Основные характеристики блока:
- входной и выходной сигналы согласно пп. 4.4, а и 4.4, б;
- диапазон настройки коэффициента пропорциональности 0,1-10;
- диапазон настройки постоянных времени 1-1000 с;
- возможность интегрирования и апериодического преобразования импульсного входного сигнала напряжением ± 24 В постоянного тока;
- возможность дополнительного демпфирования входного сигнала с диапазоном настройки постоянной времени демпфера 0-20 с;
- автоподстройка коэффициента пропорциональности и (или) постоянной времени при изменении соответствующих унифицированных входных сигналов или ступенчатое (не менее трех ступеней) изменение этих значений при замыкании "сухих" контактов, подключенных к соответствующим входам.
Блок интегрирования аналогового или импульсных входных сигналов должен обеспечивать интегральное преобразование указанных сигналов с сохранением информации при перерывах питания и восстановлением выходного сигнала при восстановлении питания.
Основные характеристики блока:
- входной и выходной сигналы согласно пп. 4.4, а и 4.4, б также импульсный входной сигнал ± 24 В постоянного тока;
- диапазон настройки постоянной времени интегрирования 5-2000 с;
- изменение выходного сигнала после перерывов питания не более 0,5 % номинального диапазона;
- возможность ограничения верхнего и нижнего уровней выходного сигнала с диапазоном настройки 0-100 %;
- возможность быстрого (не более 1 с) изменения выходного сигнала в любом из направлений при замыкании "сухих" контактов, подключенных к соответствующим входам.
Блоки алгебраических операций должны включать в себя блок алгебраического суммирования с масштабированием каждого из входных сигналов и блок для выполнения одной из следующих операций, устанавливаемых при настройке: умножение двух сигналов, деление двух сигналов, извлечение квадратного корня.
Основные характеристики блоков:
- входные в выходные сигналы согласно п. 4.4, а и 4.4, б;
- количество входов в блоке суммирования до четырех с гальваническим разделением один от другого и от остальных цепей, а также дополнительный вход от внутреннего источника (корректора);
- погрешность преобразования гальванического разделения и вычислительных операций не более 0,2 %;
- диапазон изменения масштаба при масштабировании входных сигналов 0-100 %.
Блок нелинейных преобразований должен обеспечить возможность кусочно-линейной аппроксимация не менее чем на шести участках произвольной нелинейной функции одной переменной (одного входного унифицированного сигнала).
Коэффициент передачи нелинейного элемента должен устанавливаться в диапазоне от - 10 до + 10, а точки излома характеристики в диапазоне от 0 до 100 %.
Блок выделения экстремального сигнала должен обеспечивать выделение максимального или минимального из четырех входных унифицированных сигналов.
Блок аналого-релейного преобразования должен обеспечить выдачу дискретного (релейного) сигнала, когда разность между двумя входными унифицированными сигналами становится равной или большей нуля.
Основные характеристики блока:
- входные сигналы в соответствии с пп.4.4, а и 4.4, б, выходной сигнал - по п. 4.4, г;
- диапазон изменения порога срабатывания 0-100 %;
- диапазон изменения зоны возврата 0,1-5 %;
- погрешность срабатывания не более 0,5 %;
- возможность демпфирования одного из входных сигналов с диапазоном настройки постоянной времени демпфера 0-20 с.
Комплект аппаратуры АР должен включать ряд дополнительных устройств, устанавливаемых на щите управления энергоблока и предназначенных для связи оператора-технолога с системой АР.
В состав этих устройств должны входить:
- задатчики для ручного (дистанционного) изменения заданного значения регулируемых параметров;
- задатчик для ручной установки унифицированного сигнала с параметрами по п. 4.3, а и погрешностью не более 0,5 %;
- устройство для ручного (дистанционного) управления нагрузкой и безударного переключения с ручного на автоматический режим регулирования блока с аналоговым выходом;
- устройство для ручного (дистанционного) включения и отключения регулирующего блока с импульсным выходом и дистанционного управления исполнительным механизмом;
- индикаторы-указатели положения регулирующего органа (исполнительного механизма) и значения рассогласования регулируемого параметра и задания.
Питание
блоков и устройств АР должно осуществляться от сети переменного тока
напряжением (![]() ) В с частотой 50 ± 1 Гц.
) В с частотой 50 ± 1 Гц.
Блоки (модули) комплекта аппаратуры АР должны устанавливаться на щитовых панелях или в шкафах, размещаемых в помещениях средств управления энергоблоком, и должны сохранять свои характеристики при температуре окружающей среды от 5 до 50 °С, относительной влажности от 30 до 80 %, атмосферном давлении от 84 до 106 кПа (от 630 до 800 мм рт. ст.), отсутствии в помещении примесей агрессивных газов и паров, вибрации с частотой до 25 Гц и амплитудой до 0,1 мм.
Показатели надежности и долговечности для каждого из блоков АР:
- вероятность безотказной работы за 2000 ч не менее 0,97-0,99 (в зависимости от технической сложности блока);
- среднее время восстановления для каждого блока (модуля) не более 1 ч;
- средний срок службы не менее 10 лет.
Выполнение общих источников питания для группы блоков (модулей) не должно приводить к заметному снижению надежности системы по сравнению с применением индивидуальных источников питания в каждом из блоков.
4.5. Средства микропроцессорной техники (СМПТ), используемые для решения задач АР, относятся к цифровым программируемым вычислительным устройствам повышенной надежности, осуществляющим многоканальное АР технологических процессов энергоблока.
Для связи технических средств с объектами управления и оператором-технологом в состав СМПТ должно входить устройство связи с объектом (УСО), в функции которого входит:
- прием и выдача унифицированных аналоговых сигналов с параметрами по пп. 4.4, а и 4.4, б;
- аналого-пифровое (АЦП) и цифро-аналоговое (ЦАП) преобразование;
- прием и выдача дискретных (бинарных) сигналов с параметрами по пп. 4.4, в и 4.4, г;
- дискретно-цифровое (ДЦП) и цифро-дискретное (ЦДП) преобразование;
- цифро-импульсное (ЦИП) преобразование (для управления исполнительными механизмами постоянной скорости);
- гальваническое отделение входных аналоговых сигналов один от другого и от остальных цепей и выходных аналоговых сигналов один от другого и от остальных цепей;
- гальваническое отделение групп дискретных сигналов одна от другой и от остальных цепей как на входе, так и на выходе.
Функциональные возможности СМПТ должны быть достаточны для реализации сложных систем регулирования (многоконтурных и многосвязных) с изменением при необходимости их структуры, с безударным включением регуляторов, автоматическим изменением параметров статической и динамической настройки, возможностью запрета изменения выходного сигнала в одном или обоих направлениях, выполнением логических операций, связанных с адаптацией системы регулирования к изменяющейся динамике технологических процессов.
Библиотека алгоритмов (программных модулей) должна обеспечивать возможность реализации:
- П-, ПИ- и ПИД - законов регулирования с аналоговым выходным сигналом;
- П-, ПИ- и ПИД - законов регулирования в сочетании с исполнительными механизмами постоянной скорости с импульсным выходным сигналом;
- динамического преобразования по стандартным для систем регулирования законам (демпфирования, дифференцирования, интегрирования, ПД- преобразования, слежения и др.);
- алгебраических операций (суммирования, масштабирования, умножения, деления, извлечения квадратного корня);
- нелинейных преобразований (селектирования максимального или минимального сигнала из нескольких, ограничения, кусочно-линейного и аналого-дискретного преобразования);
- формирования изменения сигнала во времени по заданному закону (программный задатчик);
- стандартных логических операций (И, ИЛИ, память, выдержка времени, счет импульсов).
Продолжительность цикла СМПТ должна составлять 0,25-2 с в зависимости от количества обрабатываемой информации и объема решаемых задач.
Диапазон изменения устанавливаемых при настройке статических и динамических параметров должен быть достаточным для реализации всех задач АР технологических процессов энергоблока и ориентировочно должен составить;
- масштабных коэффициентов (в том числе ограничения минимума и максимума, порога и гистерезиса аналого-релейного преобразования и др.) от - 100 до + 100 % с разрешающей способностью не хуже 0,1 %;
- коэффициентов передачи от - 10 до + 10 с разрешающей способностью не хуже 0,01;
- постоянных времени от 0,5 до 10000 о с возможностью установки как 0, так и ¥.
Автоматическое изменение параметров настройки (автоподстройка) должно осуществляться во всем предусмотренном для их изменения диапазоне.
Основная погрешность сквозного канала ("вход - выход") СМИТ должна быть не более 1 %.
Настройка СМПТ (задание алгоритмов работы, конфигурации контуров регулирования, параметров статической и динамической настройки и др.) должна производиться оператором-наладчиком с использованием понятий и параметров, принятых для настройки аппаратных средств АР, без необходимости использования методов и средств математического программирования.
В состав СМПТ должно входить устройство, обеспечивающее;
- настройку;
- оперативный контроль задаваемых параметров, алгоритмических моделей и связей;
- объективное протоколирование выполненной настройки.
Указанное устройство должно позволять производить настройку по месту установки СМПТ на объекте и исключать возможность несанкционированного изменения параметров настройки.
Заданные СМПТ при настройке алгоритмы, конфигурация, параметры должны сохраняться при полной потере внешнего питания в течение не менее 100 ч.
Должна быть предусмотрена возможность обмена информацией между двумя или несколькими микропроцессорами, выполняющими разные функции АР, а также возможность резервирования рабочего комплекта СМПТ аналогичным с обеспечением безударного перехода на резерв при отказах рабочего комплекта.
Связь оператора-технолога с СМПТ должна осуществляться с помощью устройств, перечисленных в п. 4.4, в объеме, аналогичном принятому для аппаратных средств АР.
Средства микропроцессорной техники должны обеспечить выполнение функций самодиагностики за счет разветвленной системы контроля, реализации тестовых программ и др.
Возникновение неисправности должно сопровождаться "замораживанием" (фиксацией на существующем уровне) всех выходных сигналов и выдачей обобщенного светозвукового сигнала об отказе на щит управления энергоблоком.
Непосредственно на СМПТ должна быть предусмотрена развернутая сигнализация, обеспечивающая идентификацию отказавшего модуля (блока).
Показатели надежности СМПТ должны определяться исходя из объема возлагаемых на них функций многоканального регулирования. При этом выполняемый одним микропроцессором объем функций АР должен быть таким, чтобы это не приводило к заметному снижению надежности по сравнению с применением аппаратных средств АР для выполнения тех же функций. Среднее время восстановления СМПТ должно быть не более 60 мин, а средний срок службы - не менее 10 лет.
Средства
микропроцессорной техники должны надежно работать при условиях окружающей среды
и электропитании по п. 4.4. Для повышения надежности питания
в качестве резервного источника питания СМПТ может использоваться блочная
аккумуляторная батарея напряжением (![]() ) В постоянного тока.
) В постоянного тока.
4.6. Комплект средств автоматического регулирования должен дополняться усилителями мощности, предназначенными для управления электродвигателями исполнительных механизмов постоянной скорости под воздействием импульсных команд от соответствующих регулирующих блоков, СМПТ или команд дистанционного управления.
Усилители при наличии на входе соответствующей команды должны обеспечивать бесконтактное включение в прямом и реверсивном направлении трехфазных электродвигателей 380/220 В мощностью до 5 кВт и их динамическое торможение в момент снятия управляющей команды.
Минимальная длительность импульса, отрабатываемого усилителями, не должна превышать 0,1 с.
Список использованной
литературы
1. ТРЕБОВАНИЯ к оборудованию энергетических блоков мощностью 300 мВт и выше, определяемые условиями их автоматизации. -М.: СПО ОРГРЭС. 1976.
2. ВСЕРЕЖИМНЫЙ комплекс средств автоматического регулирования/ Жирнов А.И., Алексеев В.Л., Захаров Ю.В. и др. - Теплоэнергетика, 1981, 10.
3. МИКРОПРОЦЕССОРНЫЕ контроллеры в системах автоматического регулирования/ Иордан Г. Г., Курносов Н.М., Козлов М.Г., Певзнер В.В. - Приборы и системы управления, 1981, № 2.
4. ГАВРИЛОВ Б.П., СЛАВИН А.А., ШАПИРО Ю.М. Новый комплекс аппаратуры автоматического регулирования "Каскад-2". - Теплоэнергетика, 1983, № 10.
ОГЛАВЛЕНИЕ