МИНИСТЕРСТВО ЭНЕРГЕТИКИ И ЭЛЕКТРИФИКАЦИИ СССР
ГЛАВНОЕ НАУЧНО-ТЕХНИЧЕСКОЕ УПРАВЛЕНИЕ ЭНЕРГЕТИКИ И ЭЛЕКТРИФИКАЦИИ
ПРОИЗВОДСТВЕННОЕ
ОБЪЕДИНЕНИЕ ПО НАЛАДКЕ, СОВЕРШЕНСТВОВАНИЮ ТЕХНОЛОГИИ
И ЭКСПЛУАТАЦИИ ЭЛЕКТРОСТАНЦИЙ И СЕТЕЙ «СОЮЗТЕХЭНЕРГО»
МЕТОДИЧЕСКИЕ УКАЗАНИЯ
ПО НАЛАДКЕ
РЕГУЛЯТОРОВ ПИТАНИЯ
БАРАБАННЫХ ПАРОВЫХ КОТЛОВ
МУ 34-70-135-85
СО 34.26.726
СЛУЖБА ПЕРЕДОВОГО ОПЫТА ПО «СОЮЗТЕХЭНЕРГО»
Москва 1987
РАЗРАБОТАНО предприятием «Сибтехэнерго» Производственного объединения по наладке, совершенствованию технологии и эксплуатации электростанций и сетей «Союзтехэнерго»
ИСПОЛНИТЕЛИ С.И. НОВИКОВ, Л.В. НОВИКОВА
УТВЕРЖДЕНО Производственным объединением по наладке, совершенствованию технологии и эксплуатации электростанций и сетей «Союзтехэнерго» 27.12.85 г.
Главный инженер К.В. ШАХСУВАРОВ
|
МЕТОДИЧЕСКИЕ УКАЗАНИЯ ПО НАЛАДКЕ РЕГУЛЯТОРОВ ПИТАНИЯ БАРАБАННЫХ ПАРОВЫХ КОТЛОВ |
МУ 34-70-135-85 |
Срок действия установлен
с 01.10.86 г.
до 01.10.96 г.
Настоящие Методические указания регламентируют состав и содержание работ по наладке регуляторов питания барабанных паровых котлов.
Методические указания содержат принципиальные положения по наладке автоматических систем регулирования (АСР) питания барабанных паровых котлов конкретные рекомендации по построению АСР питания на современных средствах авторегулирования, применяемых на тепловых электростанциях Минэнерго СССР. Даны указания по расчету статической и динамической настройки регуляторов с использованием расчетных и экспериментальных характеристик объекта регулирования, аналитических и практических методов настроек.
Методические указания предназначены для наладочного и эксплуатационного персонала предприятий Минэнерго СССР, занимающегося наладкой и эксплуатацией барабанных паровых котлов энергоблоков и энергоустановок с поперечными связями.
С выпуском настоящих Методических указаний отменяются «Рекомендации по наладке и эксплуатации регуляторов питания барабанных котлов» (М.: СЦНТИ ОРГРЭС, 1972).
1. ОБЩИЕ ПОЛОЖЕНИЯ
1.1. Особенности барабанного котла как объекта регулирования уровня
Пароводяной тракт барабанного котла разделен на водяную и паровую части. Технологический процесс котла требует постоянного соблюдения баланса генерируемого (уходящего от котла) пара и подаваемой в котел питательной воды. Показателем соответствия расхода питательной воды нагрузке котла (расходу пара котлом) является уровень в барабане котла.
Как снижение, так и повышение уровня в барабане котла за определенные пределы угрожает серьезными нарушениями технологического процесса и повреждениями основного оборудования энергоустановки. Такими пределами являются уставка защиты при понижении уровня в барабане и уставка I ступени защиты при повышении уровня в барабане.
Понижение уровня в барабане котла опасно возможностью опрокидывания циркуляции и пережога экранных труб топочных поверхностей нагрева котла. Уставка защиты при понижении уровня в барабане обычно равна минус (100 + 200) мм от среднего уровня, а при оборудовании барабанов специальными устройствами (жалюзийными решетками над всеми опускными трубами) - минус 200 мм.
Повышение уровня в барабане котла опасно возможностью заброса воды в пароперегревательную часть котла и турбину.
Защита при повышении уровня в барабане имеет две ступени: I ступень (аварийный слив), воздействующую при достижении уровня +125 мм от среднего уровня на открытие задвижки на линии слива воды из барабана, и II ступень, воздействующую при достижении уровня +200 мм от среднего уровня на отключение котла, турбины и энергоблока в целом.
Средний уровень в барабане обычно расположен на 150 - 175 мм ниже геометрической оси барабана.
Уставки защиты задаются заводами-изготовителями основного оборудования, и без проведения специальных испытаний и согласования результатов с заводами изменение уставок недопустимо, поэтому в настоящих МУ приведены ориентировочные значения уставок защит по уровню.
Для поддержания соответствия расхода питательной воды расходу пара котлы оснащаются АСР питания.
Для разработки и наладки АСР питания необходимо знать характер изменений уровня в барабане при разного рода возмущениях (изменении расхода пара котлом, питательной воды, топлива и др.).
Для целей наладки динамические свойства уровня в барабане достаточно полно описываются переходной характеристикой или кривой разгона (при значениях возмущений, отличных от единицы) при возмущении расходом питательной воды.
Кривая разгона по уровню при возмущении расходом питательной воды характеризуется отсутствием самовыравнивания, наличием запаздывания τ и скоростью разгона Е (рис. 1.1).
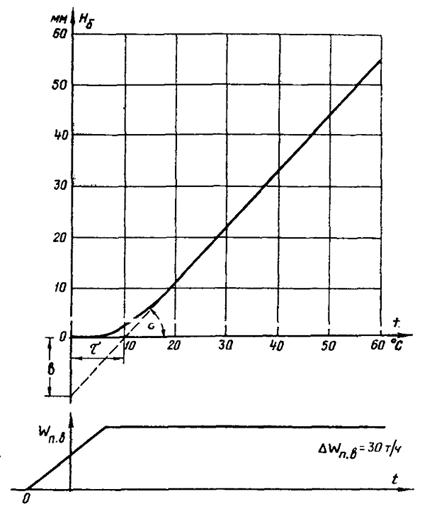
Рис. 1.1. Кривая разгона по уровню в барабане котла БКЗ-320-13,8 при возмущении расходом питательной воды
Так как АСР питания должна включаться при первой же растопке котла, когда динамические характеристики объекта регулирования еще неизвестны, необходимо аналитически определить параметры динамической характеристики по уровню в барабане по конструктивным данным котла. Из опыта наладки АСР питания известно, что τ составляет 10 - 40 с в зависимости от давления в барабане. Ниже приведены усредненные значения запаздывания для наиболее широко используемых в отечественной энергетике котлов.
|
Пределы изменения давления в барабане, МПа |
7 - 8 |
9 - 12 |
14 - 16 |
|
Запаздывание переходной характеристики по уровню в барабане, с |
30 - 40 |
20 - 25 |
10 - 12 |
Аналитически определить скорость разгона можно с помощью выражения
![]() (1.1)
(1.1)
где Е - скорость разгона, мм · ч/(т · с);
Fз.и - площадь зеркала испарения в барабане при нормальном уровне, м2;
ρп, ρв - плотность воды и пара при максимальном давлении в барабане соответственно, кг/м3.
Данные для расчета скорости разгона по уровню в барабане берут из паспорта и тепловых расчетов котла.
Для определения кривой разгона в условиях работы котла необходимо установить стационарный режим (при неизменных расходах питательной воды, пара, воздуха и топлива, отсутствии переключений и др.), выдержать этот режим в течение 10 - 15 мин., подготовить устройства регистрации уровня в барабане (вторичный прибор со скоростью протяжки ленты не менее 320 мм/ч). Для первичных измерительных преобразователей естественного сигнала рекомендуется использовать специальную приставку [1] ко вторичному прибору для изменения амплитуды и положения кривой на ленте, для преобразователей унифицированного сигнала целесообразно использовать блоки, имеющие устройства изменения сигнала (БСГ системы АКЭСР, БОС системы АКЭСР-2 и др.).
Необходимо поднять уровень в барабане до +50 мм, выдержать его стабильным в течение 3 - 5 мин. и уменьшить расход питательной воды на 15 - 20 % номинального расхода. Запись изменения уровня следует вести до установления постоянной скорости изменения уровня, контролируя положение уровня в пределах уставки защиты при снижении уровня («пуск»).
Для достоверного определения параметров кривой разгона необходимо снимать не менее 6 - 8 кривых разгона при возмущениях одного знака, что позволяет провести статистическую обработку данных. Простейшая обработка кривых разгона при возмущениях одного знака заключается в отбрасывании кривых разгона с самыми благоприятными и самыми неблагоприятными характеристиками.
Под благоприятными характеристиками понимают малое запаздывание и малую скорость разгона. Оставшиеся кривые разгона усредняют, получая Еср и τср для одного знака возмущения.
Параметры настройки регулирующих устройств предпочтительнее выбирать по Еср и τср, полученных при положительных знаках возмущений, так как возмущения этого знака выше на 10 - 20 %.
Так как время хода регулирующего клапана соизмеримо со временем запаздывания, необходимо сместить начало отсчета на 1/2 времени хода клапана.
Скорость разгона определяется наклоном касательной к части кривой изменения уровня с постоянной скоростью. Время запаздывания определяется отрезком времени от начала отсчета до точки пересечения касательной с осью времени.
Скорость разгона определяется следующим соотношением:
![]() (1.2)
(1.2)
где в - отрезок на оси Нб, отсекаемый наклонной частью кривой, мм;
ΔWп.в - возмущение расходом питательной воды, т/ч;
t - запаздывание, с.
При невозможности получить постоянную скорость в пределах уставки защиты рекомендуется определить импульсную разгонную характеристику по уровню с помощью возмущения расходом питательной воды, имеющего форму прямоугольного импульса.
При определении импульсных характеристик по уровню в барабане рекомендуется наносить возмущения расходом питательной воды 15 - 20 % номинального продолжительностью не менее времени запаздывания.
Обрабатывается импульсная кривая разгона путем построения вспомогательной кривой разгона, начиная с момента нанесения возмущения обратного знака (реакция объекта регулирования на задний фронт импульса), и суммирования ее ординат с ординатами импульсной кривой разгона. Вспомогательная кривая строится путем переноса точек с импульсной кривой разгона на интервале времени, равном длине импульса возмущения. Операция суммирования повторяется до установления постоянной скорости разгона суммарной кривой. Этапы обработки импульсной кривой разгона показаны на рис. 1.2.
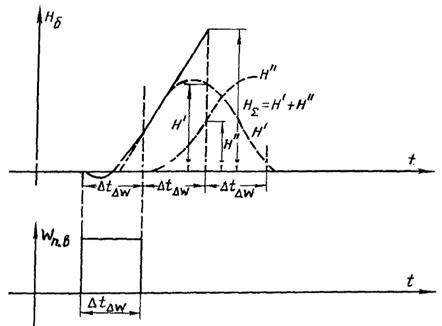
Рис. 1.2. Обработка кривой разгона при импульсном возмущении
1.2. Типовая схема АСР питания
Наладка АСР питания барабанных паровых котлов осуществляется в пределах диапазона регулирования нагрузок котла (от минимальной до максимальной). Максимальная нагрузка у всех котлов одинакова (номинальная 100 %), минимальная зависит от вида сжигаемого топлива (у газомазутных котлов 30 % номинальной), от вида шлакоудаления для пылеугольных котлов (шлакоудаление твердое 60 %, жидкое 70 - 75 %, в зависимости от предельной низшей нагрузки по условиям выхода жидкого шлака), от конструктивных особенностей котла (в этом случае регулируемый диапазон определяется заводом-изготовителем или наладочной организацией) [2].
Для работы в пределах диапазона регулирования нагрузок котла классической является АСР питания с вводом трех сигналов: по расходам питательной воды, пара и уровню воды в барабане (рис. 1.3). Схема удовлетворяет предъявляемым требованиям к поддержанию уровня на газомазутных и пылеугольных котлах.
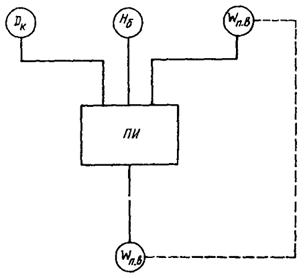
Рис. 1.3. Структурная схема типовой трехимпульсной АСР питания
В трехимпульсной АСР питания можно выделить два контура регулирования. Первый, внутренний, образован участком подвода питательной воды к барабану от места установки регулирующего питательного клапана (РПК) до места установки сужающего устройства для измерения расхода воды, в состав объекта регулирования этого контура включается и сам датчик расхода воды. Регулируемым параметром контура является расход питательной воды, регулирующим воздействием является перемещение РПК, изменяющее степень дросселирования потока и, тем самым, расход питательной воды. Регулятор этого контура включает регулирующий прибор и исполнительный механизм с регулирующим органом.
Объект регулирования этого контура характеризуется свойством самовыравнивания и имеет весьма малые запаздывания и постоянную времени, что не позволяет полностью использовать ПИ-закон регулирования из-за нарушения условия скользящего режима. Существенную роль при этом играют даже допустимые по условиям всей АСР питания нелинейности (люфты, выбеги и др.), поэтому настройка регулятора сводится к настройке его как П-регулятора.
Контур выполняет задачу стабилизации расхода питательной воды и является быстродействующим.
Второй, внешний, контур состоит из питательного трубопровода, экономайзера, барабана с комплексом его устройств, опускных труб, подъемных обогреваемых экранов. Входным параметром контура является расход питательной воды (от места установки РПК), выходным - уровень в барабане. Первый из этих параметров является регулирующим воздействием, второй - регулируемым параметром.
Объект регулирования имеет значительные массы металла и воды, чем и объясняется его большая аккумулирующая способность. Большое влияние на поведение уровня при возмущениях оказывает тип экономайзера (кипящий или некипящий). При экономайзере некипящего типа более резко проявляется «набухание» при возмущении расходом питательной воды. К объекту относится также и датчик уровня в барабане котла.
Внешний контур - инерционный, характеризуется большой длительностью переходных процессов. Для него регулятором является совокупность регулирующего прибора и цепи обратной связи по расходу воды.
Эквивалентный регулятор внешнего контура зависит только от коэффициентов усиления входящих в него звеньев и работает по П-закону регулирования с одним параметром настройки - коэффициентом усиления.
В качестве устройства ввода возмущения в АСР питания используется цепь, состоящая из датчика расхода пара и делителя его сигнала (органа масштабирования). Датчик расхода пара близок к пропорциональному звену (как и датчик расхода питательной воды). Следовательно, устройство ввода возмущения является пропорциональным звеном.
При изменении расхода пара быстродействующий контур приводит расход воды в соответствие с расходом пара и обеспечивает постоянство уровня в барабане котла. Возмущения, влияющие на уровень в барабане непосредственно, отрабатываются П-регулятором внешнего контура при появлении сигнала по отклонению уровня от заданного. К таким возмущениям относятся возмущения по топливу, тепловосприятию, появление расходов пара и воды, не учитываемых соответствующими датчиками (непрерывной продувки и др.).
Система отличается простотой, достаточно высокой устойчивостью к изменению нагрузки в пределах диапазона регулирования котла, удовлетворительной точностью.
Возмущения - нагрузкой (расходом пара) отрабатываются первым контуром, выходом которого является расход питательной воды. Возмущения расходом питательной воды отрабатываются с высоким быстродействием, так как участок от места измерения расхода питательной воды до места установки регулирующего органа имеет благоприятную динамическую характеристику (малое запаздывание: 1 - 3 с, малую постоянную времени: 5 - 10 с). Таким образом, наличие ввода по возмущению расходом пара позволяет изменить расход питательной воды, не допуская изменения уровня в барабане, так как динамическая характеристика по уровню имеет запаздывание.
Использование трехимпульсной схемы регулирования питания для работы в пусковых режимах затруднительно из-за:
больших статических погрешностей измерения уровня, расходов воды и пара при нерасчетных параметрах;
неустойчивой работы на низких нагрузках вследствие значительного изменения динамических характеристик в контуре ввода возмущения и в контуре регулирования уровня;
изменения перепада давлений на РПК в широких пределах в процессе пуска.
1.3. Элементы АСР питания и их расчет
Автоматическая система регулирования питания барабанного котла включает следующие типовые элементы:
устройства измерения параметров технологического процесса;
регулирующие устройства;
коммутирующую и управляющую аппаратуру;
исполнительные механизмы;
регулирующие органы.
Устройства измерения параметров технологического процесса включают измерительные сужающие устройства на линиях расхода пара и питательной воды, измерительное устройство уровня в барабане и соответствующие измерительные преобразователи.
Переход на единую систему использования унифицированного сигнала упростил получение сигналов по расходу пара и питательной воды, так как АСР питания стала одним из потребителей унифицированного сигнала, получаемого с использованием защитных элементов (в аппаратуре АКЭСР, «Каскад» - защитное устройство ВОI, в аппаратуре АКЭСР-2 - защитное устройство ЗУ04 и др.). Сужающие устройства рассчитываются согласно [3]. В качестве первичных измерительных преобразователей расхода используют дифманометры-расходомеры [4] по ГОСТ 18140-72, чаще всего с предельными перепадами (0,4; 0,63; 1,0; 1,6 кгс/см2), причем больший перепад, как правило используют для измерения расходов питательной воды. Нижний предел измерения дифманометров по [3] равен 30 % номинального значения. Чаще всего используют дифманометры ДМЭ, ДМЭР на соответствующий перепад давлений; из выпускаемых в последнее время преобразователей наиболее полно этим требованиям отвечают преобразователи системы «Сапфир».
Измерение уровня в барабане осуществляется с помощью гидростатических приборов. В качестве первичного измерительного устройства используют в последнее время только сосуды с частично обогреваемой плюсовой линией, которые хорошо работают в широком диапазоне изменения давлений при уровне, близком к среднему положению. На рис. 1.4 и 1.5 показаны сосуды конструкции Барнаульского котельного завода и Южтехэнерго. При изготовлении уравнительных сосудов в эксплуатационных условиях место врезки плюсовой соединительной (импульсной) линии (размер h1) выбирают применительно к конкретному котлу из условия равенства перепадов давлений при различных нагрузках котла (например, при номинальном и минимальном давлениях в барабане котла);
![]() (1.3)
(1.3)
где h3, h4 - размеры уравнительного сосуда по его эскизу, м;
γв, γп, γс - соответственно плотность воды, пара и конденсата во внутренней трубке уравнительного сосуда при номинальном и минимальном давлениях, т/м3.
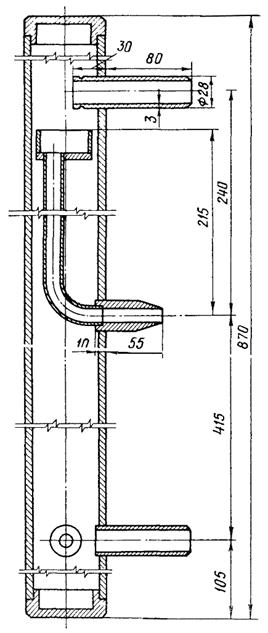
Рис. 1.4. Уравнительный сосуд конструкции Барнаульского котельного завода
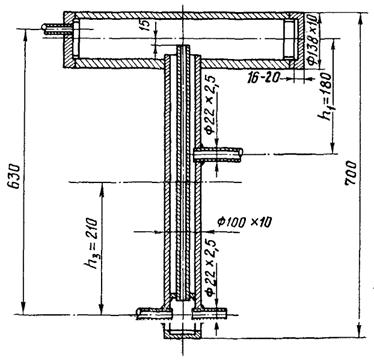
Рис. 1.5. Уравнительный сосуд конструкции Южтехэнерго
При расчетах используется в качестве характеристики уравнительного сосуда с частично обогреваемой плюсовой линией коэффициент передачи уравнительного сосуда Кс (мм/мм), который определяется по эмпирической формуле Кс = 0,97 - 0,0009Dк.ср. (Dк.ср - средняя нагрузка диапазона регулирования котла, т/ч). Эти уравнительные сосуды обеспечивают минимальные погрешности измерения уровня в интервале 0,1 - 15,5 МПа. Для преобразования перепада уровня в электрический сигнал применяются дифманометры-уровнемеры ДМЭ с верхним пределом измерения 6,3 кПа (630 мм вод. ст.). Имеющиеся функциональные возможности современной регулирующей аппаратуры позволяют относительно легко сформировать поправку по давлению, однако усложнение структуры системы питания котла должно быть обосновано.
В качестве регулирующей аппаратуры используются приборы РПИБ, «Контур», «Каскад», АКЭСР, «Каскад-2», АКЭСР-2, РС-29 и др. Часть этих приборов (РПИБ) снята с производства или снимается (АКЭСР). Основные сведения по аппаратуре приведены в [5 - 7].
В приложении I приведены схемы реализации АСР питания барабанных котлов для нескольких новых видов аппаратуры регулирования.
В АСР питания используется различная по исполнению коммутирующая аппаратура: контактная (МКР-0, ПМЕ и др.) и бесконтактная (на магнитных усилителях УМД, тиристорных усилителях У22, У23, У101, симисторах ПБР-2-3, ПБР-ЗА).
Возможно использование симистора ПБР-ЗА в качестве бесконтактного пускателя электропривода соответствующей мощности [8].
В качестве исполнительных механизмов в АСР питания используют встроенный электропривод Чеховского завода энергетического машиностроения (ЧЗЭМ) (мощность двигателей 1,0 - 2,8 кВт), реже МЭО и МЭП Чебоксарского завода электрических исполнительных механизмов (ЧЗЭИМ) (мощность двигателей 0,27 - 0,4 кВт) и МЗТА.
Исполнительные механизмы дополняются указателями выхода (положения), позволяющими оценить степень открытия РПК.
Для встроенного электропривода характерны большие люфты и недопустимый выбег. Для ликвидации люфтов используют противолюфтовые вставки. Для устранения выбегов применяют электротормозы (электрические конденсаторы емкостью 150 - 300 мкФ с рабочим напряжением 600 В).
При монтаже и наладке встроенного электропривода проверяется соответствие выбранного типа встроенного электропривода и типа коробки конечных выключателей.
При выборе и проверке электропривода рекомендуется пользоваться таблицей применимости, выпускаемой заводом-изготовителем арматуры.
Характеристикой электропривода, используемой при наладке АСР питания, является время сервомотора, т.е. время непрерывного хода клапана от закрытого до открытого положения.
На электростанциях применяются золотниковые, скальчатые поворотные, шиберные, дисковые самоуплотняющиеся регулирующие клапаны.
Золотниковые и поворотные клапаны широко применяются на электростанциях с поперечными связями; они проще в изготовлении и ремонте, а приводом их служат исполнительные механизмы МЗТА и ЧЗЭИМ. Наиболее широко распространены шиберные регулирующие клапаны ЧЗЭМ с профилем в шибере и в седле [10]. Особенностью работы регулирующих питательных клапанов является переменный перепад давлений на клапане (от 1 до 8 МПа), что приводит к большому эрозионному износу, значительным усилиям на штоке.
Надежная работа шиберных клапанов питания гарантируется заводом-изготовителем при перепадах не выше 3,0 МПа. Серийно выпускаемые клапаны обладают конструктивными недостатками, низкой ремонтопригодностью и малым межремонтным периодом. Для их привода используют встроенный электропривод, не имеющий тормозных устройств.
Дисковый самоуплотняющийся клапан ПП «Белэнергоремналадка» (рис. 1.6) обеспечивает питание котла при любых нагрузках, работает с перепадами от 2 - 3 до 7 - 8 МПа, обладает хорошей ремонтопригодностью и повышенным межремонтным периодом, управляется приводом типа МЭО, имеющим тормозное устройство [10]; максимальный расход питательной воды через клапан около 500 т/ч.
Для основных регулирующих питательных клапанов применяются клапаны Dу 225, 250 и 275 мм; для байпасных Dу 100 мм, реже 60 мм.
Для обеспечения надежной работы АСР питания производится расчет питательного клапана, включающий определение расходной и конструктивной характеристик клапана [11]. Пример расчета регулирующего клапана дан в приложении 2.
Экспериментальное определение расходной характеристики РПК рекомендуется проводить в следующем порядке:
- при стационарном режиме работы и нагрузке котла, близкой к нижнему пределу диапазона регулирования, устанавливается уровень ниже уставки I ступени защиты при повышении уровня (аварийного слива) на 20 - 30 мм;
- закрывается РПК с остановами на 5 - 6 с через каждые 10 (20) % хода по указателю положения с фиксированием его положения и расхода питательной воды;
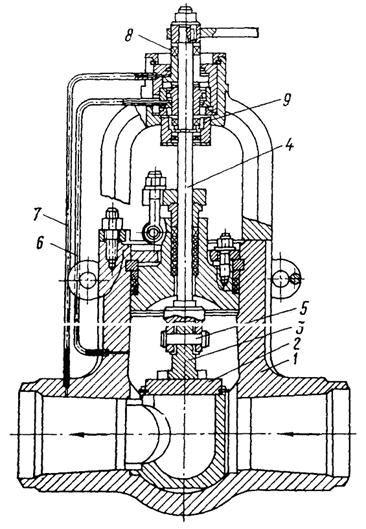
Рис. 1.6. Регулирующий питательный клапан конструкции ПП «Белэнергоремналадка»:
1 - корпус клапана; 2 - седло; 3 - золотник; 4 - шпиндель; 5 - панель; 6, 7 - соединительная трубка; 8 - подшипник; 9 - втулка рычага
- снимается зависимость расхода питательной воды от положения РПК; при открытии РПК фиксируется максимальный расход;
- определяется начальный пропуск при закрытом РПК и нагрузке котла, обеспечиваемой байпасным РПК. Открывается байпасный РПК, закрывается основной РПК, отмечается расход питательной воды, закрывается запорная задвижка перед основным РПК и записывается расход питательной воды. Начальный пропуск равен разности отмеченных расходов питательной воды. При двухпоточном питании котла аналогично проверяется начальный пропуск РПК;
- определяется скорость регулирования. По расходной характеристике определяется участок, соответствующий требованиям к РПК, с фиксированием на данном участке времени хода РПК (берется среднее значение между временем на закрытие и временем на открытие).
![]() (1.4)
(1.4)
где Sp - скорость регулирования, т/(ч · с);
Wп.в - приращение расхода питательной воды на найденном участке, т/ч;
Тср.см - среднее время хода на заданном участке, с.
Приведенная последовательность операций по определению характеристик РПК не учитывает зависимости гидравлической характеристики сети от нагрузки. Полученная скорость регулирования РПК используется при реализации параметров динамической настройки регулирующих устройств АСР.
1.4. Требования к АСР питания, ее элементам и их монтажу
Автоматическая система регулирования питания барабанных котлов при работе в регулируемом диапазоне нагрузок должна обеспечить поддержание уровня в следующих пределах [2]:
- в стационарном режиме (при отсутствии резких возмущений нагрузкой) максимально допустимые отклонения уровня не должны превышать ± 20 мм;
- при скачкообразном возмущении нагрузкой на 10 % (исходная нагрузка - номинальная) максимально допустимые отклонения уровня не должны превышать ± 50 мм;
- в нормальном стационарном режиме работы котла число включений не должно превышать шести в минуту.
Требования к точности поддержания уровня в барабане котлов в пусковых режимах могут быть ограничены уставками сигнализации (± 50 мм).
В аварийных режимах со сбросом нагрузки ограничиваются требованиями удержания уровня в пределах уставок предельных технологических защит по повышению (понижению) уровня в барабане.
Опыт наладки АСР питания барабанных котлов [13] показывает возможность достижения достаточно высокого качества регулирования: в стационарных режимах до ± 5 мм; при 20 %-ных возмущениях - до ± 10 мм; при сбросах нагрузки - до ± 50 мм.
К исполнительным механизмам и регулирующим органам предъявляются следующие требования [12]:
- начальный пропуск должен быть минимальным (практически нулевым по прибору расхода воды);
- люфт не должен превышать 2 - 3 % номинального расхода;
- крутизна расходной характеристики во всем диапазоне не должна изменяться более чем в два раза;
- максимальный расход через регулирующий орган должен составлять 1,1 - 1,2 номинального;
- время выбега не должно превышать 0,3 суммарной длительности включений регулятора при работе в пульсирующем режиме.
Требования к монтажу уравнительных сосудов сводятся к следующему:
- место врезки в барабан должно быть определено с учетом изменения положения зеркала испарения в наиболее характерных режимах (по нагрузке полутопок, от сочетания работающих горелок и мельниц). Рекомендуется использовать среднее по расположению заборное устройство для АСР питания и регистрирующего прибора;
- штоки запорных вентилей Dу 20 мм на соединительных линиях от барабана к сосуду должны быть в горизонтальном положении;
- соединительные линии на уровне штуцеров сосуда должны иметь горизонтальные неизолированные участки длиной не менее 800 мм для охлаждения до температуры окружающей среды;
- при установке стойки крепления сосуда необходимо выдержать зазор для перемещения сосуда совместно с барабаном при его нагреве;
- радиус гиба соединительной трубы диаметром 28´3 мм к барабану должен быть не менее 150 мм, соединительной трубы диаметром 16´2 мм к дифманометру - не менее 100 мм;
- верхняя соединительная труба к барабану не должна теплоизолироваться для обеспечения заполнения конденсатом плюсовой камеры сосуда; она должна иметь после вентиля уклон в сторону сосуда;
- нижняя соединительная труба к барабану должна иметь уклон;
- при растопке соединительные линии не следует продувать, а после заполнения барабана надо произвести продувку сосуда;
- часть заборного устройства до выхода плюсовой линии не должна изолироваться, остальная часть должна тщательно изолироваться.
2. РАСЧЕТ СТАТИЧЕСКОЙ НАСТРОЙКИ АВТОМАТИЧЕСКОЙ СИСТЕМЫ РЕГУЛИРОВАНИЯ ПИТАНИЯ
Исходными данными для расчета параметров статической настройки (ПСН) являются:
технологические требования к точности поддержания уровня в барабане;
данные лабораторной проверки преобразователей сигнала по уровню;
данные лабораторной проверки регулирующего прибора (или паспортные данные).
На рис. 2.1 показана структурная схема АСР питания с указанием ПСН.
Изменение ПСН осуществляют:
органами масштабирования сигнала по уровню и изменения зоны нечувствительности (определяют точность поддержания уровня);
органами изменения задания и коррекции (определяют заданное положение уровня в барабане);
органами изменения задания (определяют диапазон и цену деления задатчика);
изменением полярности подключения концов сигнальной обмотки измерительных преобразователей.
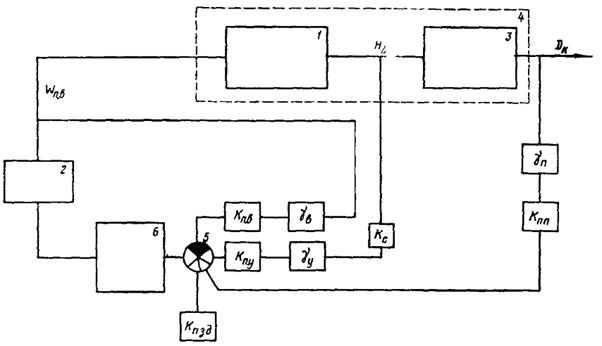
Рис. 2.1. Структурная схема АСР для расчета ПСН
1 - водяная часть барабана; 2 - трубопровод питательной воды; 3 - паровая часть барабана; 4 - модель барабана как объект регулирования; 5 - узел сравнения; 6 - регулирующий прибор
Аппаратурная реализация органов ПСН зависит от используемой аппаратуры регулирования; ее диапазоны приведены в таблице.
2.1. Расчет ПСН регуляторов питания с унифицированным сигналом
2.1.1. Из опыта наладки и эксплуатации АСР питания барабанных котлов рекомендуется выбирать точность поддержания уровня в барабане примерно ± 5 мм. Положение органа масштабирования по уровню можно определить, исходя из требуемой точности
![]() (2.1)
(2.1)
где Ку - коэффициент передачи сигнала по уровню;
ΔХ - приращение сигнала по уровню в пределах требуемой точности уровня в барабане;
Δ - зона нечувствительности регулирующего прибора.
|
Используемая аппаратура |
Зона нечувствительности, % |
Диапазон корректора, % |
Диапазон задатчика, % |
Диапазон изменения постоянной времени демпоирования, с |
Диапазон изменения коэффициента передачи или скорости связи |
Диапазон изменения времени интегрирования, с |
Диапазон длительности импульса, с |
Контроль рассогласования (гнезда) |
|
|
РПИБ |
И-Ш-62 |
- |
- |
- |
0,5 - 13 |
- |
- |
- |
Д-Е ≈ В-Г = |
|
РПИ |
120 - 900 мВ |
- |
- |
- |
0,8 - 20 мВ/с |
5 - 2000 |
0,1 - 0,5 |
- |
|
|
АКЭСР |
БКР |
- |
- |
РЗДО-100 |
0 - 21 |
- |
- |
- |
Г - Г0 |
|
РБИ |
0,2 - 2,0 |
- |
0 - 20 |
0,2 - 2,5 %/с |
5 - 500; |
0,1 - 1,0 |
Г0 - Г3 |
||
|
20 - 2000 |
|||||||||
|
«КАСКАД» |
ИО4 |
- |
Грубо ± 100 |
Дискретно ± 5 или ± 20; плавно 0 - 1 |
- |
- |
- |
- |
А-Б |
|
Точно ± 5 |
|||||||||
|
Р21 |
0,2 - 1,6 |
- |
- |
0 - 9 |
0,1 - 2,5 %/с |
5 - 510; 20 - 2000 |
0,2 - 1,0 |
||
|
АКЭСР-2 |
РП-У |
0,2 - 2,0 |
5 |
Внутренний 0 - 5 мА; внешний 5 |
0 - 30 |
0,5 - 5 с/(%) |
5 - 500; 20 - 2000 |
0,1 - 1,0 |
У1-0 |
|
«КАСКАД-2» |
Р27 Р27,1 |
0,2 - 2,0 |
± 100 |
Внешний 0 - 100 |
0 - 10 |
0,3 - 10,0 с/(%) |
5 - 500; 20 - 2000 |
0,08 - 0,5 |
- |
|
«КОНТУР» |
025,1 |
0,5 - 5 |
± 100 |
± 20 |
0 - 10 |
0,32 - 12,6 с/(%) |
5 - 500 |
0,1 - 1,0 |
Е-0.Т |
Коэффициент передачи сигнала по уровню определяется как
Ку = γуКсКп.уКс.у, (2.2)
где γу - крутизна характеристики измерительного преобразователя по уровню;
Кс - коэффициент передачи уравнительного сосуда;
Кп.у - коэффициент масштабирования по уровню;
Кс.у - коэффициент передачи согласующего устройства.
Подставив значение Ку из (2.2) в выражение (2.1), получим:
γуКсКп.уКс.уΔHб = Δ. (2.3)
Откуда
![]() (2.4)
(2.4)
Величина Δ может изменяться в достаточно широких пределах с помощью ручки органа настройки зоны нечувствительности регулирующего прибора. Изменением зоны нечувствительности регулирующего прибора гасится пульсация сигналов, подаваемых на вход регулирующего прибора. На практике чаще всего коэффициент масштабирования по уровню принимают равным 1.
Тогда положение органа настройки зоны нечувствительности может быть определено следующим образом:
Δ = γуКсКсуΔHб. (2.5)
Если в ходе наладочных работ по АСР питания изменятся коэффициент масштабирования сигнала по уровню или зона нечувствительности, необходимо уточнить соответственно расчет параметров статической настройки.
2.1.2. Внешний (или внутренний) задатчик является средством оперативного управления АСР питания, которое позволяет дежурному персоналу технологического цеха изменить поддерживаемое регулятором питания значение уровня. Задатчик должен быть отградуирован в единицах регулируемой величины (мм). Диапазон изменения уровня следует определить, исходя из возможных значений поддерживаемого уровня. Рекомендуется принять диапазон изменения уровня в пределах уставок сигнализации уровня, т.е. ± 50 мм или H'1 + H'2 = 100 мм.
При этом сигнал от измерительного преобразователя уровня должен быть скомпенсирован сигналом от задатчика:
αI = γуКсКпуКсу(H'1 + H'2), (2.6)
где I - диапазон изменения сигнала от внешнего (или внутреннего) задатчика;
H'1, H'2 - уставки сигнализации по уровню.
Цена деления (мм/%) внешнего задатчика равна
![]()
2.1.3. Выбор нужного направления действия регулятора следует начинать с сигнала по уровню: при повышении уровня регулятор должен срабатывать в сторону «Меньше». Необходимое направление работы регулятора достигается переброской концов сигнальной обмотки преобразователя (на регулирующем приборе). Направление действия регулятора по расходу питательной воды определяется таким образом, чтобы при увеличении расхода регулятор работает на «Меньше», а регулятора по расходу пара - при увеличении расхода регулятор работает на «Больше».
2.1.4. При выставленных коэффициентах масштабирования сигналов преобразователей задатчика установка заданного уровня достигается с помощью корректора.
2.2. Расчет ПСН регуляторов питания с естественным сигналом
2.2.1. Последовательность расчета ПСН регуляторов питания с естественным сигналом аналогична приведенной в разд. 2.1., особенностью расчета является сравнение напряжений от измерительных преобразователей в узле напряжения и сложность совмещения нелинейных (квадратичных) характеристик преобразователей. При обработке характеристик с естественным сигналом необходимо проводить линеаризацию характеристик в диапазоне регулирования котла. Рекомендуется проводить линеаризацию по методу секущей (рис. 2.2). Секущая проводится таким образом, чтобы ошибка на концах диапазона и в его середине была бы одинакова по значению, но разного знака:
![]()
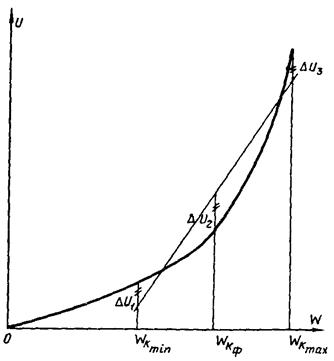
Рис. 2.2. Линеаризация характеристики измерительного преобразователя по методу секущей
По наклону секущей определяется крутизна характеристики преобразователя расхода воды и расхода пара, используемые в дальнейших расчетах.
2.2.2. Органами настройки, определяющими точность поддержания уровня, являются потенциометр «Нечувствительность» («Зона»). При изменении положения органа настройки от минимума к максимуму увеличивается зона нечувствительности регулятора, что ведет к снижению точности поддержания уровня, а уменьшение зоны нечувствительности ведет к повышению износа клапана и привода из-за увеличения числа срабатываний (допустимое число срабатываний при стационарном режиме 5 - 6 в минуту).
Выбор положения органа масштабирования или коэффициента передачи по регулируемому параметру осуществляется по уровню в барабане котла.
Положение органа масштабирования может быть выбрано из простого алгебраического уравнения, описывающего условия равновесия регулирующего прибора: сигнал на входе от преобразователя при изменении параметра на допустимое по требованию технологии значение должен быть равен зоне нечувствительности:
 (2.7)
(2.7)
где αчув.у - искомое положение органа масштабирования или коэффициент передачи (дел., доли един.);
αчув.(max) - максимальное число делений органа масштабирования; в аппаратуре РПИБ оно равно 10, коэффициент передачи в ГСП - 1,0;
γу - крутизна характеристики преобразователя, определенная при лабораторной проверке аппаратуры или экспериментально при αчув.у = 10 дел., мВ/мм;
Ки.б - коэффициент усиления измерительного или согласующего блока, мВ/мВ (мВ/мА);
ΔНб - нечувствительность по уровню в барабане котла, мм; задается по условиям технологии.
Отсюда
 (2.8)
(2.8)
2.2.3. При выборе положения органа изменения задания задатчик должен быть проградуирован в единицах регулируемой величины (мм). Диапазон изменения регулируемой величины определяется допустимыми изменениями уровня, т.е. уставками сигнализации (от понижения уровня H'1 и повышения уровня H'2), при этом напряжение от датчика по уровню изменяется на значение
 (2.9)
(2.9)
Это напряжение должно быть компенсировано напряжением от задатчика
 (2.10)
(2.10)
где αчув.зд - искомое положение ручки «Чувствительность задатчика»;
Uзд.max - суммарное изменение напряжения на гнездах Д - Е (Е-ОТ) при повороте задатчика от 0 до 100 %.
Следовательно,
 (2.11)
(2.11)
или
 (2.12)
(2.12)
Цена деления (мм/%) задатчика при этом будет равна
![]()
Нормальное положение задатчика - 50 %, сигнал от него равен 0.
В качестве заключительного этапа расчета ПСН можно рекомендовать проверку в лабораторных условиях весь комплект аппаратуры АСР питания в сборе и уточнение положений органов настроек.
3. РАСЧЕТ ДИНАМИЧЕСКОЙ НАСТРОЙКИ АВТОМАТИЧЕСКОЙ СИСТЕМЫ РЕГУЛИРОВАНИЯ ПИТАНИЯ
3.1. Исходными данными для расчета параметров динамической настройки (ПДН) служат:
параметры динамической характеристики по уровню в барабане при возмущении расходом питательной воды (время запаздывания и скорость разгона);
параметры динамической характеристики по расходу питательной воды при возмущении положением РПК (время запаздывания, постоянная времени, коэффициент усиления);
параметры пульсаций сигналов (амплитуда и период).
Изменение ПДН осуществляют органами:
масштабирования сигналов по расходу питательной воды и пара (определяют точность ввода режимного фактора);
изменения коэффициента передачи и времени интегрирования регулирующего прибора (определяют требуемое качество регулирования);
изменения постоянной времени демпфера (определяет степень сглаживания пульсаций сигналов).
Предварительно должен быть выполнен расчет ПСН регулирующих устройств АСР питания.
Расчетные методы определения ПДН дают приближенные результаты, которые могут быть использованы как предварительные и требуют уточнения экспериментальным путем.
На рис. 3.1 показана упрощенная структурная схема АСР питания для расчета ПДН, которая позволяет уточнить параметры настройки регулирующих устройств.
Для внутреннего контура, выходом которого является собственно регулирующий прибор с его параметрами настройки - коэффициентом передачи (скоростью связи) и временем интегрирования, последовательно с регулирующим прибором включены измерительные устройства расхода питательной воды с органом масштабирования этого сигнала. Коэффициент передачи эквивалентного регулятора внутреннего контура, включающего собственно регулирующий прибор и измерительные устройства расхода питательной воды, можно записать в виде:
где K'p - коэффициент передачи собственно регулирующего прибора;
γв - крутизна характеристики измерительного преобразователя расхода питательной воды;
Кп.в - коэффициент масштабирования по расходу питательной воды;
Кс.у - коэффициент передачи согласующего устройства.
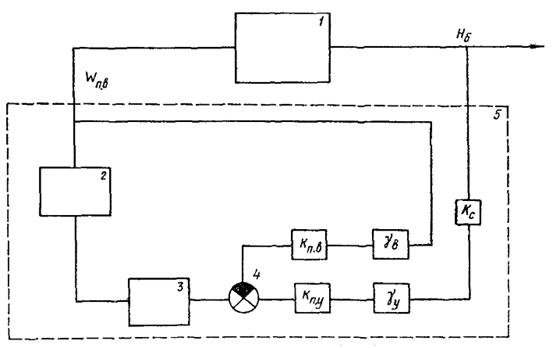
Рис. 3.1. Структурная схема АСР для расчета ПДН:
1 - барабан; 2 - трубопровод питательной воды; 3 - регулирующий прибор; 4 - узел сравнения; 5 - эквивалентный регулятор по уровню в барабане
Динамика этого контура во многом определяется настройкой устройства демпфирования пульсаций сигналов.
Для внешнего контура, выходом которого является уровень в барабане, регулирующим устройством является последовательное соединение измерительных устройств уровня и внутреннего контура, в котором регулирующий прибор охвачен малоинерционной обратной связью по расходу воды.
С учетом последовательного соединения канала измерения уровня, коэффициент передачи которого пропорционален крутизне характеристики преобразователя и положению органа масштабирования сигнала по уровню, коэффициент передачи регулятора внешнего контура можно записать как
Из сравнения выражений (3.1) и (3.2) следует, что коэффициент передачи сигнала по расходу питательной воды входит в состав коэффициента передачи эквивалентных регуляторов внутреннего и внешнего контуров.
При определении ПДН следует вести расчет настройки:
- демпфирующих устройств;
- внешнего инерционного контура (по уровню);
- внутреннего быстродействующего контура (по расходу питательной воды);
- устройства ввода режимного фактора по расходу пара.
3.2. В связи со значительными пульсациями сигналов необходимо учитывать следующие рекомендации по настройке демпфера [14].
При известных периодах пульсаций сигналов по расходам пара, питательной воды и уровня выбирается наибольший период. Демпфер может ослабить пульсации с периодом Т в
![]()
Принимая, что амплитуда пульсаций должна быть снижена после демпфера до 0,3 ΔНб, постоянная времени демпфера равна
![]() (3.3)
(3.3)
где А, Т - амплитуда и период пульсаций.
3.3. При расчете внешнего инерционного контура для определения коэффициента передачи используют параметры динамической характеристики объекта по уровню при возмущении расходом питательной воды:
![]() (3.4)
(3.4)
где В - коэффициент, связанный со степенью колебательности:
В = 1,0 при ψ = 0,7 ¸ 0,8;
В = 0,8 при ψ = 0,9 ¸ 0,95.
Приравнивая (3.2) к (3.4), получим
![]() (3.5)
(3.5)
откуда положение органа масштабирования сигнала по расходу питательной воды:
Для регулирующих приборов с естественным сигналом используют крутизну линеаризованной характеристики измерительного преобразователя сигнала по расходу питательной воды; например, для РПИБ выражение (3.6) принимает вид
![]() (3.7)
(3.7)
3.4. При расчете внутреннего быстродействующего контура АСР питания должны быть выбраны положения органов изменения коэффициента передачи и времени интегрирования регулирующего прибора.
Выбор параметров настройки регулирующего прибора производят по кривой разгона по расходу питательной воды при изменении положения регулирующего клапана.
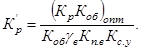
По кривой разгона по расходу питательной воды определяют
запаздывание τоб, постоянную времени Тоб
и коэффициентом усиления Коб. По номограмме рис. 3.2 по отношению ![]() определяются комплексы
(КрКоб)опт и
определяются комплексы
(КрКоб)опт и  .
.
По этим комплексам определяют коэффициент передачи регулятора
![]() (3.8)
(3.8)
и время интегрирования
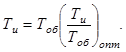 (3.9)
(3.9)
Используя (3.1) и (3.6), из выражения (3.8) можно найти коэффициент передачи собственно регулирующего прибора
 (3.10)
(3.10)
Учитывая сложность получения кривой разгона в условиях быстропротекающих процессов, на практике часто прибегают к экспериментально методу настройки (см. разд. 4) или используют эмпирические формулы, например [14]:
![]() (3.11)
(3.11)
![]() (3.12)
(3.12)
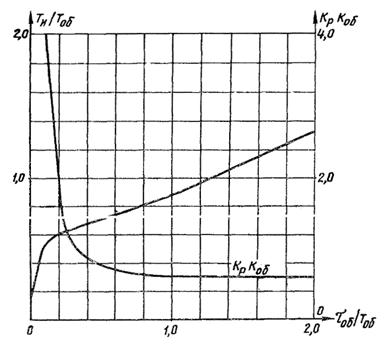
Рис. 3.2. Номограммы для расчета динамических параметров настроек
Для реализации коэффициента передачи регулятора (если нет такого органа настройки на регулирующем приборе) используют ручку «Скорость связи», применяя соотношение
 (3.13)
(3.13)
где Sp - скорость регулирования регулирующего органа.
При 2,5 < Uс.в < 0,2 расчет необходимо повторить при новом значении Кп.в.
Наиболее сложна реализация ПДН на аппаратуре РПИБ; производится она
следующим образом: для реализации требуемого времени интегрирования (изодрома)
находится значение ![]() (Сз - емкость обратной
связи по данным лабораторной проверки или паспортным данным регулирующего
прибора РПИ, равная 10 или 20 мкФ). Для реализации
требуемого коэффициента усиления регулятора используется соотношение между
скоростью обратной связи Uо.с, К'p и скоростью регулирования Sp
(Сз - емкость обратной
связи по данным лабораторной проверки или паспортным данным регулирующего
прибора РПИ, равная 10 или 20 мкФ). Для реализации
требуемого коэффициента усиления регулятора используется соотношение между
скоростью обратной связи Uо.с, К'p и скоростью регулирования Sp

Скорость регулирования определяется по соотношению

где Σпуп - линейный диапазон работы регулирующего органа, % УП;
tперем - время перемещения регулирующего органа в линейном диапазоне его работы, с.
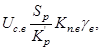
Реализация Uo.c для РПИБ осуществляется по графику Uo.c = f(R13, αcc) (рис 3.3) изменением R13 - регулировка «Грубо» и изменением αсс - «Плавно». Следует иметь в виду нелинейность зависимости от Uo.c от R13, αcc.
Если в процессе наладки внешнего контура изменяется положение органа масштабирования сигнала расхода воды, необходимо скорректировать настройку регулятора внутреннего контура и наоборот. Результаты расчета дают лишь исходные данные по ПДН, требующие экспериментального уточнения.
3.5. Для расчета устройства ввода возмущения сигнал от измерительного преобразователя расхода пара должен быть скомпенсирован сигналом от измерительного преобразователя расхода воды для всего диапазона регулирования котла:
![]() (3.14)
(3.14)
где γв, γп - крутизна характеристики измерительного преобразователя расхода воды и пара соответственно;
Кпп - коэффициент масштабирования сигнала по расходу пара;
ΔDк.рег - диапазон регулирования паропроизводительности котла.
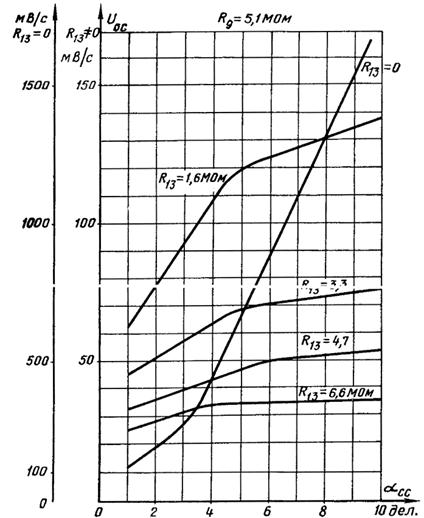
Рис. 3.3. Графики реализации расчетного коэффициента передачи регуляторов аппаратуры РПИБ
Коэффициент масштабирования сигнала по расходу пара равен
![]() (3.15)
(3.15)
что обеспечивает требуемую точность ввода возмущения по нагрузке.
Для регулирующих приборов с естественным сигналом используют крутизну линеаризованных характеристик преобразователей расхода питательной воды и пара.
Из условия компенсации напряжения преобразователя расхода пара при изменении нагрузки напряжением от преобразователя расхода питательной воды
ΔUп = ΔUв
или более подробно
 (3.16)
(3.16)
где ![]() ,
, ![]() -
крутизна линеаризованной в регулируемом диапазоне котла характеристики
преобразователя расхода пара и воды соответственно.
-
крутизна линеаризованной в регулируемом диапазоне котла характеристики
преобразователя расхода пара и воды соответственно.
При наличии двух (или нескольких) паропроводов съема пара 1 однопоточном питании это обстоятельство должно быть учтено уменьшением коэффициента преобразователя расхода пара в два раза (или в несколько раз по числу параллельных паропроводов).
Из условия материального баланса положение органа масштабирования расхода пара может быть определено следующим соотношением:
![]() (3.17)
(3.17)
Примеры расчета настройки АСР питания приведены в приложении 3.
4. ЭКСПЕРИМЕНТАЛЬНЫЙ МЕТОД НАСТРОЙКИ АВТОМАТИЧЕСКОЙ СИСТЕМЫ РЕГУЛИРОВАНИЯ ПИТАНИЯ
4.1. Экспериментальный метод предполагает завершенность всех монтажных работ по элементам АСР (установка и подключение первичных преобразователей, регулирующей аппаратуры), настройку схемы привода, органов контроля положения РПК, схемы защиты и сигнализации.
Подготовительные операции по настройке АСР должны быть завершены: подано напряжение питания на регулирующую аппаратуру; проверены и включены указатели уровня в барабане (произведена их сверка); установлено номинальное давление в барабане, котел работает в диапазоне регулирования нагрузок. Настройку рекомендуется вести в следующем порядке:
- проверка крутизны характеристик преобразователей и их фазировка;
- расчет ПСН;
- определение ПДН внутреннего контура;
- настройка внешнего контура;
- настройка устройства ввода по возмущению.
4.2. Для проверки крутизны характеристики на гнезда контроля сигнала рассогласования подключают вольтметр с высоким входным сопротивлением. Выводят в нулевое положение органы масштабирования сигналов, подаваемых на регулирующий прибор, затем вводят полностью орган масштабирования по расходу питательной воды. Для ликвидации пульсаций сигнала по расходу питательной воды постепенно вводят орган изменения постоянной времени демпфирования, добиваясь ликвидации пульсации сигнала.
Изменяя расход питательной воды на 5 - 10 % номинального, фиксируют приращение сигнала по расходу питательной воды; их отношение определяет крутизну характеристики преобразователя расхода питательной воды. Фазировка (направление воздействия) регулирующего прибора - при увеличении расхода воды воздействие должно быть направлено на уменьшение степени открытия РПК (светится индикатор работы регулирующего прибора «Меньше»). При неправильной фазировке следует поменять сигнальные концы от преобразователя. Записывается найденное значение крутизны преобразователя и положение демпфера.
Таким же образом проводится проверка преобразователя расхода пара: вводится орган масштабирования по расходу пара, остальные выводятся. Изменением положения демпфера добиваются ликвидации пульсаций. Наносится возмущение расходом пара, определяется по отношению приращений крутизна характеристики преобразователя и его фазировка (при увеличении расхода пара светится индикатор «Больше»). Записывается положение демпфера.
Проверка преобразователя уровня (в комплекте с уравнительным сосудом) проводится аналогично. Фиксируются крутизна характеристики преобразователя уровня, фазировка его подключения (при повышении уровня светится индикатор «Меньше») и положение демпфера.
4.3. Расчет ПСН регулирующего прибора производится по найденным значениям крутизны характеристик преобразователей и данным регулирующего прибора по методике, приведенной в разд. 2. Положение демпфера выбирается наибольшее; не рекомендуется время демпфирования больше 6 - 8 с.
4.4. Настройка внутреннего контура производится экспериментально в следующем порядке:
4.4.1. Выставляются расчетные положения органов масштабирования сигналов преобразователей (кроме уровня), демпфера, балансируется регулирующий прибор (по индикаторам или по прибору на гнездах измерения сигнала рассогласования). Положение органа изменения времени интегрирования регулирующего прибора выбирается соответствующим Ти = Тдемп. Устанавливается коэффициент передачи регулирующего прибора
![]()
или скорость связи
![]()
4.4.2. Определяется оптимальное значение коэффициента передачи регулирующего прибора (скорость связи). С этой целью проверяется цена деления задатчика, для чего переключатель рода работы переводится в положение «Автоматическое» и наносится серия из 3 - 5 небольших возмущений задатчика. Отмечаются установившиеся расходы воды и положения задатчика при средней из опытов цене деления.
Для проверки настройки внутреннего контура наносится возмущение задатчиком (нанести возмущение расходом питательной воды и проверить отработку этого возмущения не удается из-за высокого быстродействия контура) соответствующее 15 - 20 % номинального расхода.
После двух-трех включений регулирующего прибора переключатель рода работы переводится в положение «Дистанционное». Возможны три вида переходных процессов:
- новое значение расхода воды превышает значение, соответствующее новому положению задатчика, следовательно, коэффициент передачи регулирующего прибора велик (скорость связи мала);
- новое значение расхода воды ниже значения соответствующего новому положению задатчика, т.е. коэффициент передачи регулирующего прибора мал (скорость связи велика). В этих случаях необходимо соответственно скорректировать коэффициент передачи (скорость связи) и повторить опыт; коэффициент передачи достиг оптимального значения, следовательно, достигнуто равенство заданного и установленного регулирующим прибором расхода воды.
4.4.3. Определяется оптимальное время интегрирования. После установки оптимального коэффициента передачи регулирующего прибора наносится возмущение задатчиком (15 - 20 % номинального расхода воды) и наблюдаются последующие за третьим включения. Возможны три случая:
- четвертое включение по направлению совпадает с третьим, следовательно, время интегрирования меньше оптимального и его следует увеличить;
- четвертое включение по знаку противоположно третьему, т.е. время интегрирования больше оптимального и его следует уменьшить;
- четвертое включение отсутствует, т.е. время интегрирования оптимальное.
После корректировки опыты необходимо повторить.
4.4.4. Необходимо уточнить положение ручки «Время импульса» исходя из следующего критерия: при спокойной работе оборудования число включений регулятора в минуту не должно превышать 5 - 6.
Изменение в сторону «Меньше» положения ручки ведет к дроблению импульсов, уменьшению длительности включений, что, в свою очередь, повышает устойчивость регулирующего прибора, однако увеличивает износ коммутирующей аппаратуры, электропривода, регулирующего органа. Обычно tимп = 0,3 + 0,7 с.
4.5. Настройка внешнего контура производится при нагрузке котла, близкой к минимальной (выше на 10 %) в следующем порядке:
- вводится орган масштабирования сигнала по уровню в расчетное положение. Переключатель рода работ переводится в положение «Автоматическое» после предварительной проверки отсутствия сигнала на входе регулирующего прибора;
- наблюдается спокойный режим работы регулятора по стабилизации расхода питательной воды (должно быть не более 5 - 6 включений регулятора в минуту);
- переключатель рода работы переводится в положение «Дистанционное», наносится возмущение расходом питательной воды и ведется наблюдение за уровнем в барабане котла по штатному прибору. После появления отклонения уровня переключатель рода работы переводится в положение «Автоматическое» и наблюдается отработка возмущения по штатному прибору. Оптимальным переходным процессом считается процесс со степенью затухания Ψ = 0,9 ¸ 0,95 и небольшим отклонением уровня от прежнего стабилизированного значения (статическая погрешность должна быть менее 3 - 5 мм).
Если степень затухания меньше заданной, т.е. Ψ £ 0,8, следует изменить в сторону «Меньше» положение органа масштабирования сигнала по уровню в барабане котла и с помощью последовательных опытов определить оптимальное положение этой ручки.
Если переходный процесс по уровню окажется затянутым (апериодический затянутый), следует изменить в сторону «Меньше» положение органа масштабирования сигнала по расходу воды. Однако следует иметь в виду, что при этом изменяется настройка коэффициента передачи регулятора внутреннего контура (контура стабилизации по расходу питательной воды). Для сохранения оптимальной настройки внутреннего контура необходимо соответственно уменьшить скорость связи (следует вернуться к проверке оптимальности его настройки).
После получения оптимального переходного процесса наладка внешнего контура считается законченной.
4.6. Настройка устройства ввода по возмущению (по расходу пара) сводится к определению положения органа масштабирования сигнала по расходу пара. Устанавливается расчетное положение органа масштабирования по расходу пара. Возмущение наносится расходом пара. Изменению расхода пара должно соответствовать точно такое же изменение расхода питательной воды. При несоответствии расходов пара и воды изменяется положение органа масштабирования по расходу пара.
Заключительным этапом проверки оптимальности настройки питания являются испытания АСР.
5. ОФОРМЛЕНИЕ РЕЗУЛЬТАТОВ НАЛАДКИ И ИСПЫТАНИЙ РЕГУЛЯТОРОВ ПИТАНИЯ
5.1. Завершающим этапом наладки регуляторов питания являются испытания АСР. Существуют три вида испытаний: наладочные, приемо-сдаточные, эксплуатационные.
Общим условием проведения всех видов испытания является наличие программы, согласованной с технологическим (котельным или котлотурбинным) цехом, ЦТАИ и утвержденной главным инженером электростанции.
5.2. Наладочные испытания проводятся для:
- определения расходной характеристики РПК и динамической характеристики его исполнительного механизма (скорости регулирования);
- определения динамической характеристики объекта регулирования;
- настройки АСР экспериментальным методом.
5.3. Приемо-сдаточные испытания проводятся при сдаче АСР наладочной организацией заказчику, а на действующих электростанциях - при сдаче ЦТАИ технологическому цеху. В состав приемо-сдаточных испытаний, согласно [12], включают:
- проверку предупредительной сигнализации и защиты при повышении уровня до уставки I ступени (аварийный слив);
- определение расходной характеристики РПК;
- проверку качества отработки АСР питания возмущений расходом питательной воды, частичным сбросом и набором нагрузки, полным сбросом нагрузки.
Приемо-сдаточные испытания проводятся в полном объеме только на головном образце данной серии котлов, а также в случае реконструкций котла, приводящих к изменению динамических свойств по уровню; в частичном объеме (кроме полного сброса нагрузки) - после ввода котла в эксплуатацию из монтажа и после каждого капитального ремонта котла.
- проверку технического состояния РПК по диаграммам записей уровня в барабане котла, расходов пара и питательной воды (1 раз в сутки);
- проверку плотности регулирующих клапанов (1 раз в месяц);
- поконтурную проверку работоспособности АСР (при появлении сомнений в работоспособности) с нанесением характерных возмущений;
- испытания без полного сброса нагрузки, проводимые регулярно 1 раз в год или после ремонтов, связанных с заменой элементов или перенастройкой регулятора.
Характерными возмущениями являются:
при проверке работы внутреннего контура - возмущение задатчиком (наблюдается точность отработки заданного изменения расхода питательной воды и характер работы регулятора - число и направление срабатываний регулятора) или дистанционным изменением положения РПК и быстрой установкой ключа управления в положение «Автоматическое» (в этом случае возмущение и все последующие действия должны производиться быстро, чтобы обеспечить прохождение первого включения регулятора полностью, возмущение должно быть относительно небольшим - около 20 т/ч - или наноситься задатчиком);
при проверке работы внешнего контура - перевод АСР на дистанционное управление и нанесение возмущения расходом питательной воды с выдержкой времени до появления отклонения уровня в барабане, при котором ключ управления устанавливается в положение «Автоматическое» и наблюдается отработка возмущения; нанесение возмущения, не проходящего через контур стабилизации расхода питательной воды, например изменением уровня в барабане путем кратковременного открытия аварийного слива, и наблюдение за поведением уровня. Возможна оценка поведения АСР при возмущении нагрузкой (для электростанций с поперечными связями - нагрузкой соседнего котла для энергоблока - возмущение клапанами турбины).
5.5. Состав и содержание работ по эксплуатации АСР питания регламентируются руководящими и нормативно-техническими документами [12], [13].
В состав основных работ по проверке работоспособности АСР питания включаются эксплуатационные испытания по п. 5.4. В состав работ по эксплуатации АСР питания включается ведение технической документации, что позволяет иметь необходимые данные для расчетов настроек АСР, использовать оптимальные параметры настроек АСР при последующей наладке однотипного оборудования, при замене отдельных элементов АСР (первичных измерительных преобразователей, регулирующей аппаратуры, РПК, привода), вести контроль за состоянием аппаратуры, повысить культуру производства, обеспечить правильную организацию эксплуатации.
В состав технической документации по наладке, испытаниям и сдаче АСР питания целесообразно включать:
- протоколы лабораторной проверки регулирующей аппаратуры (первичных измерительных преобразователей; регулирующего блока, блока согласования и гальванической развязки);
- экспериментальные данные по элементам АСР (характеристики объекта регулирования, характеристики регулирующего органа - расходную характеристику, время перемещения);
- протоколы испытаний АСР (приемо-сдаточных и эксплуатационных без сбросов нагрузки);
- сведения о допустимых пределах работы АСР (уставки защиты, сигнализации, условия включения в работу и отключения АСР);
- результаты наладки АСР (результаты статической и динамической настроек АСР);
- исполнительные схемы (принципиальную или принципиально-монтажную схемы АСР);
- эскизы элементов АСР (уравнительного сосуда, проходного сечения регулирующего органа);
- сведения о замене элементов АСР.
Приложение 1
ПРИМЕРЫ РЕАЛИЗАЦИИ СХЕМ АВТОМАТИЧЕСКОЙ СИСТЕМЫ РЕГУЛИРОВАНИЯ ПИТАНИЯ
Многообразие регулирующей аппаратуры вызывает некоторые трудности при реализации АСР питания. Ниже приводятся три схемы АСР питания на аппаратуре «Контур», «Каскад», АКЭСР-2.
1. Аппаратура «Контур» (рис. III.1).
В качестве измерительных преобразователей использованы дифференциальные манометры с естественным сигналом ППДМ-23014. Регулирующий прибор - Р25.1.1 со встроенным задатчиком и станцией управления, коммутирующей прибор ПБР-2-3, исполнительный механизм МЭО-25/25-0,2.
2. Аппаратура «Каскад» (рис. III.2).
Преобразователи с унифицированным выходом ДМЭ, ДМЭР. В качестве согласующего блока применен измерительный блок И04, регулирующий прибор Р21, внешнее задающее устройство ЗУП. Регулирующий прибор через блок управления релейного регулятора Б21 управляет тиристорным усилителем У22 и встроенным электроприводом.
В первом и втором примере реализована трехимпульсная схема АСР питания.
3. Аппаратура АКЭСР-2 (рис. III.3).
Измерительные преобразователи ДМЭ, ДМЭР; регулирующий прибор РП-4У через блок ручного управления БРУ-42 управляет тиристорным усилителем У-22 и исполнительным механизмом совместно с клапаном. Особенностью схемы является включение блока суммирования и демпфирования БСД, что связано с необходимостью учета расхода питательной воды, отбираемой после измерительной шайбы на впрыски и сброс в деаэратор. Внешнее задающее устройство РЗД-12 подключено к регулирующему прибору. Для упрощения другие потребители унифицированного сигнала от измерительных преобразователей не показаны, дано лишь одно защитное устройство ЗУ04.
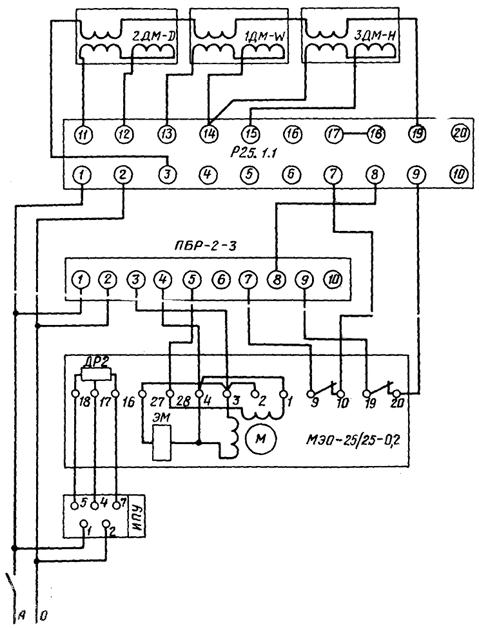
Рис. III.1. Реализация АСР питания на аппаратуре «Контур»
Рис. III.2. Реализация АСР питания на аппаратуре «Каскад»
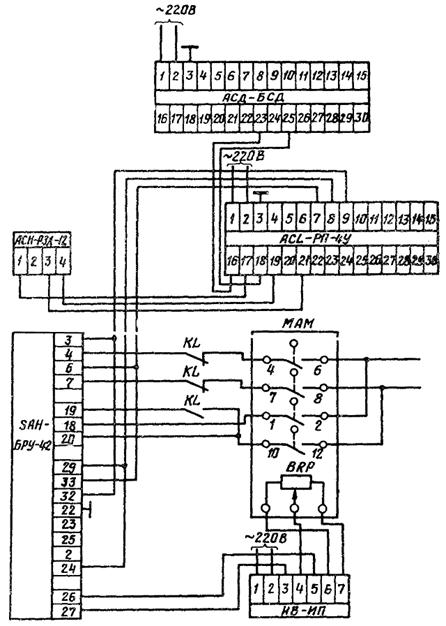
Рис. III.3. Реализация АСР питания на аппаратуре АКЭСР-2
Приложение 2
РАСЧЕТ ХАРАКТЕРИСТИК ОСНОВНОГО РЕГУЛИРУЮЩЕГО ПИТАТЕЛЬНОГО КЛАПАНА КОТЛА БКЗ-820-13,8
1. Предварительно выбирается РПК шиберного типа Dy 250 мм. Расчет максимального проходного сечения РПК приведен в табл. П2.1.
2. В связи c тем, что расчет РПК ведется для создаваемого котла, для которого тип питательного насоса выбран ориентировочно и характеристика сети подлежит уточнению в процессе проектирования, следует выполненные расчеты считать предварительными.
3. В основу расчета положены рекомендации по методам определения пропускной способности и выбора оптимальной расходной характеристики РПК [11].
4. Принятая расчетная схема показана на рис. П2.1. Котел работает с турбиной по блочной схеме.
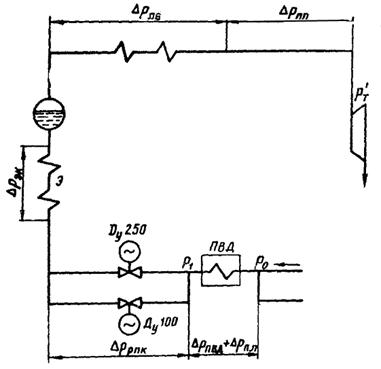
Рис. П2.1. Схема для расчета РПК
5. Оптимальной для РПК барабанных котлов считается линейная расходная характеристика.
6. График изменения перепада давлений на РПК показан на рис. П2.2.
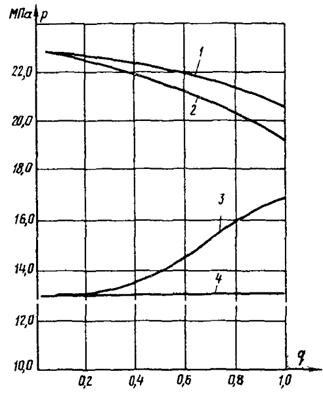
Рис. П2.2. График изменения перепада давлений на РПК в зависимости от нагрузки барабанного котла БКЗ-820-13,8:
1 - напорная характеристика насоса; 2 - изменение давления Р1 перед РПК; 3 - изменение давления Р2 за РПК; 4 - давление перед турбиной Р'т
7. Результаты расчета пропускной и конструктивной характеристик РПК приведены в табл. П.2.2 и на рис. П2.3.
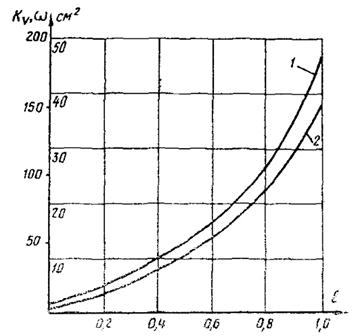
Рис. П2.3. Пропускная и конструктивная характеристики шиберного РПК котла БКЗ-820-13,8:
1 - пропускная характеристика; 2 - конструктивная характеристика
Таблица П.2.1
|
Параметр |
Обозначение, формула |
Значение |
|
Среда - питательная вода |
||
|
Расчетный расход воды, т/ч |
G |
800 |
|
Максимальный расход воды, т/ч |
Gmax = Gη; η = 1,1 |
880 |
|
Давление в напорном патрубке насоса при Сmax, МПа |
P0 |
20,5 |
|
Давление пара перед турбиной, МПа |
P'т |
13,0 |
|
Температура питательной воды, °С |
t1 (из теплового расчета) |
230 |
|
Плотность воды, т/м3 |
ρ |
0,84 |
|
Условный проход РПК, мм |
dy |
250 |
|
Условный проход трубопровода, мм |
Dy |
250 |
|
Сопротивление при Gmax, МПа: |
||
|
питательной линии |
ΔPп.лmax |
0,3 |
|
ПВД |
ΔPпвдmax |
1,1 |
|
экономайзера |
ΔPэкmax |
0,7 |
|
пароперегревателя |
|
2,0 |
|
паропровода от котла до турбины |
|
0,9 |
|
Перепад давлений на клапанах РПК при Gmax, МПа |
|
2,5 |
|
Площадь максимального проходного сечения, см2 |
|
40,12 |
|
Минимальный расход воды, т/ч |
Gmin |
44 |
|
Максимальный перепад давлений на клапанах РПК, МПа |
|
7,5 |
|
Перепад давлений на РПК, соответствующий началу кавитации, МПа |
Рнас = 2,8 |
|
|
Ркав = Кс(Р1 - Рнас) |
13,0 |
|
|
Кс = 0,82 |
||
|
Проверка на кавитацию |
|
Нет |
|
Выбранный типоразмер клапана |
Черт. ЧЗЭМ |
В-43 |
|
Исполнение |
7 |
Таблица П.2.2
|
Параметр |
Обозначение, формула |
Расход питательной воды, т/ч |
||||
|
880 |
660 |
440 |
220 |
44 |
||
|
Относительный расход |
|
1,0 |
0,75 |
0,50 |
0,25 |
0,05 |
|
Квадрат относительного расхода |
q2 |
1,0 |
0,56 |
0,25 |
0,06 |
0,0025 |
|
Относительный ход клапана |
l |
1,0 |
0,75 |
0,50 |
0,25 |
0,05 |
|
Давление в напорном патрубке насоса, МПа |
p0 |
20,5 |
21,5 |
22,0 |
22,5 |
22,8 |
|
Давление перед турбиной, МПа |
|
13,0 |
13 |
13 |
13 |
13 |
|
Сопротивление, МПа: |
||||||
|
ПВД |
ΔРПВД = ΔРПВДmaxq2 |
1,10 |
0,62 |
0,28 |
0,07 |
0,003 |
|
питательной линии |
ΔРпл = ΔРплmaxq2 |
0,30 |
0,17 |
0,07 |
0,02 |
0 |
|
экономайзера |
ΔРэк = ΔРэкmaxq2 |
0,70 |
0,39 |
0,18 |
0,04 |
0,0005 |
|
пароперегревателя |
ΔРпе = ΔРпеmaxq2 |
2,0 |
1,12 |
0,5 |
0,12 |
0,005 |
|
паропровода от котла до турбины |
ΔРпп = ΔРппmaxq2 |
0,90 |
0,50 |
0,23 |
0,05 |
0,0023 |
Приложение 3
ПРИМЕРЫ РАСЧЕТА НАСТРОЙКИ АСР ПИТАНИЯ
1. Расчет настройки регулятора питания котла ТПЕ-427
1.1. Исходные данные
Котел ТПЕ-427 (Dk = 500 т/ч; Pб = 15,2 МПа; tпе = 540 °С) работает на общую магистраль; аппаратура ГСП «Каскад» (регулирующий прибор Р21) и преобразователи:
уровня в барабане ДМЭ-630, коэффициент преобразования 0,0083 мА/мм;
расхода питательной воды ДМЭР-0,63, коэффициент преобразования 0,0095 мА/(т/ч);
расхода пара ДМЭР-2,5, коэффициент преобразования 0,017 мА/(т/ч).
Данные по регулирующей аппаратуре соответствуют заводским.
Кривая разгона определена на минимальной нагрузке τ = 13 с, Е = 0,031 мм · ч/(с · т).
Уставки сигнализации по уровню: ![]() = -50 мм и
= -50 мм и ![]() = 50 мм.
= 50 мм.
1.2. Расчет положения ручки «Чувствительность 1» (по уровню в барабане).
Диапазон допустимых изменений по уровню в барабане (сумма уставок сигнализации) составляет 100 мм.
Нечувствительность по уровню в барабане принята ± 5 мм.
Положение ручки «Чувствительность 1» по уровню
![]()
Принимаем Кпу = 1,0.
1.3. Расчет положения ручки «Чувствительность 2» (по расходу питательной воды)
Коэффициент усиления регулятора
![]()
Коэффициент передачи уравнительного сосуда
![]()
Положение ручки «Коэффициент передачи по параметру 2» (по расходу питательной воды)

1.4. Расчет положения ручки «Коэффициент передачи задающего параметра» (по расходу пара).
Положение ручки
![]()
1.5. Положение ручки «Коэффициент передачи задающего устройства»

где Кзд - диапазон действия задающего устройства; выбирается равным 40 %, принимаем Кп.зд = 0,25.
1.6. Настройка внутреннего контура
Настройка получена экспериментально Uсв = 1,8; tимп = 0,4; Ти = 13 с.
2. Расчет настройки регулятора питания котла ТП-158
2.1. Исходные данные
Котел ТП-158 (Dk = 230 т/ч; рб = 11,3 МПа; tпе = 540 °С) работает в блоке с турбиной К-90-55-3. Котел с жидким шлакоудалением, Dk.min = 145 т/ч и Dk.max = 220 т/ч.
Аппаратура регулирования РПИБ и преобразователи с дифференциально-трансформаторной связью: уровня в барабане - ДМ-630, коэффициент преобразования γу = 0,8 мВ/мм, уравнительный сосуд с частично обогреваемой плюсовой линией; расхода питательной воды ДМ-0,63, коэффициент преобразования 2,0 мВ/(т/ч); расхода пара ДМ-1,0, коэффициент преобразования 3,1 мВ/(т/ч), коэффициент усиления полупроводникового усилителя Киб = 59; зона нечувствительности: минимальная - 150 мВ; максимальная - 710 мВ; диапазон действия задатчика: 1635 мВ при αзд = 10; 19,4 мВ при αзд = 1,0.
При минимальной нагрузке котла снята разгонная характеристика с Е = 0,026 мм · ч/(с · т); τ = 20 с.
Пульсации ликвидированы по каждому параметру (пар, вода, уровень)
индивидуально, в дальнейшем использована минимальная зона нечувствительности.
Уставки сигнализации ![]() = -50 мм и
= -50 мм и ![]() = +50 мм.
= +50 мм.
2.2. Расчет положения ручки «Чувствительность 1» (по уровню воды в барабане).
Диапазоны допустимых изменений по уровню воды в барабане (сумма уставок сигнализации) составляет 100 мм нечувствительность ± 5 мм.
Положение ручки «Чувствительность 1»

2.3. Расчет положения ручки «Чувствительность 2» (по расходу воды)
Коэффициент усиления регулятора
![]()
Принято В = 1,0, т.е. Ψ = 0,8.
Статическая неравномерность регулирования по уровню при изменении нагрузки от максимальной до минимальной
![]()
Коэффициент передачи уравнительного сосуда
![]()
Положение ручки «Чувствительность 2»

![]()
2.4. Расчет положения ручки «Чувствительность 3» (по расходу пара)
![]()
2.5. Положение ручки «Чувствительность задатчика»
![]()
принимается 0,3 дел.
Цена деления задатчика
![]()
2.6. Настройка внутреннего контура проведена экспериментально: положение потенциометра «Скорость связи» αсс = 7,0 дел., R13 = 0; R9 = 1 МОм.
2.7. Проверка правильности расчета настройки регулятора питания проведена путем изменения нагрузки котла со 145 до 195 т/ч (соответственно 65 и 85 % номинальной нагрузки).
Проверка работоспособности АСР питания произведена резким сбросом нагрузки со 195 до 125 т/ч (95 и 56 %) и набросом со 125 до 215 т/ч.
Список литературы, на которую ссылаются в Методических указаниях
2. ОСТ 24.030.46.74. «Котлы паровые стационарные. Поставка». - М.: Стандарты, 1974. - 110 с.
5. ЭЛЕКТРОННЫЕ регулирующие приборы серии РПИБ. - М.: ЦНИИТЭМС, 1970. - 203 с.
6. ГоСУДАРСТВЕННАЯ система промышленных приборов и средств автоматизации. Т. 3. Устройства преобразования, обработки, отображения, хранения информации и выработки команд управления. Вып. 4. Электронная унифицированная система приборов автоматического регулирования «Каскад». - М.: ЦНИИТЭИ, 1974. - 55 с.
9. СПРАВОЧНИК по арматуре тепловых электростанций. - М.: Энергоиздат, 1981. - 304 с.
15. ТИПОВАЯ инструкция по эксплуатации средств ТАИ тепловых электростанций (ТИ 34-70-027-84). - М.: СПО Союзтехэнерго, 1984. - 34 с.
СОДЕРЖАНИЕ