РОССИЙСКОЕ АКЦИОНЕРНОЕ ОБЩЕСТВО ЭНЕРГЕТИКИ
И ЭЛЕКТРИФИКАЦИИ «ЕЭС РОССИИ»
МЕТОДИЧЕСКИЕ УКАЗАНИЯ
ПО НАЛАДКЕ И ОБСЛУЖИВАНИЮ
ГИДРАВЛИЧЕСКИХ РЕГУЛЯТОРОВ
В СИСТЕМАХ ТЕПЛОСНАБЖЕНИЯ
РД 34.35.416-97
СЛУЖБА ПЕРЕДОВОГО ОПЫТА ОРГРЭС
Москва 1998
Разработано Открытым акционерным обществом «Фирма по наладке, совершенствованию технологии и эксплуатации электростанций и сетей ОРГРЭС»
Исполнители К. Н. САБУРОВ, Е. М. ШМЫРЕВ, А. Р. СИМОНОВ, Е. А. ЩУПЛОВА, Н. И. БАЛАШЕВА (цех теплофикации)
Утверждено Департаментом науки и техники РАО «ЕЭС России» 03.06.97 г.
Начальник А. П. БЕРСЕНЕВ
|
МЕТОДИЧЕСКИЕ
УКАЗАНИЯ |
РД 34.35.416-97 |
Вводятся в действие
с 01.06.1998 г.
Настоящие Методические указания устанавливают порядок наладки и обслуживания гидравлических регуляторов, применяемых при автоматизации объектов систем теплоснабжения, теплопотребления и источников тепловой энергии.
Настоящие Методические указания предназначены для предприятий тепловых сетей, электростанций и котельных, работающих на органическом топливе, а также прочих предприятий, производящих работы по эксплуатации и ремонту гидравлических регуляторов в системах теплоснабжения и входящих в РАО «ЕЭС России».
Настоящие Методические указания могут быть распространены на союзы, ассоциации, акционерные общества, предприятия других форм собственности, имеющие в своем составе тепловые сети, а также на проектные институты.
С выходом настоящих Методических указаний утрачивают силу «Методические указания по наладке и обслуживанию гидравлических регуляторов Союзтехэнерго (ОРГРЭС) в системах теплоснабжения» (М.: СПО Союзтехэнерго, 1987).
1. ОСНОВНЫЕ ПОЛОЖЕНИЯ
1.1. Гидравлическая автоматическая система регулирования (ГАСР) - такая автоматическая система регулирования, в которой в качестве рабочей среды и носителя энергии для работы элементов АСР используется жидкость. В частности, в системах теплоснабжения в ГАСР используется вода.
Под объектом регулирования (ОР) понимается участок объекта регулирования от клапана до точки измерения регулируемого параметра.
1.2. Различают регуляторы прямого (РПД) и непрямого действия (РНПД):
регулятор прямого действия для перемещения регулирующего органа использует энергию, поступающую только от чувствительного элемента;
регулятор непрямого действия для перемещения регулирующего органа использует энергию внешнего источника. Особенностью регуляторов в системах теплоснабжения является то, что для их работы используется внутренняя энергия (давление воды в трубопроводах).
Структурная схема замкнутой АСР с регулятором непрямого действия приведена на рис. 1.
В Методических указаниях приняты следующие обозначения технологических параметров:
Урег - регулируемый параметр;
Удоп - допустимое отклонение регулируемого параметра;
Хзад - заданное значение регулируемого параметра;
Хрег - регулирующее воздействие;
Хв - возмущающее воздействие;
Рх - командное воздействие;
![]() - импульс на
чувствительный элемент (плюсовой);
- импульс на
чувствительный элемент (плюсовой);
![]() - импульс на чувствительный
элемент (минусовой);
- импульс на чувствительный
элемент (минусовой);
рр - давление рабочей среды;
ро - давление рабочей среды в дренажных магистралях.
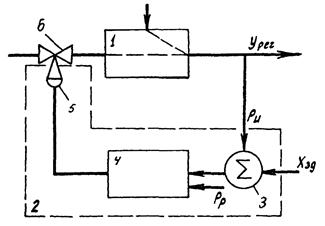
Рис. 1. Структурная схема замкнутой АСР с регулятором непрямого действия:
1 - объект регулирования; 2 - гидравлический регулятор; 3 - чувствительный элемент; 4 - усилительный элемент; 5 - исполнительный механизм; 6 - регулирующий орган
1.3. Факторы, вызывающие отклонение регулируемого параметра от его заданного значения и нарушающие равновесие в АСР, называются возмущающими воздействиями.
Внешним возмущающим воздействием (возмущением) называется воздействие на АСР внешней среды (например, воздействие нагрузки).
Внутренним возмущением называется воздействие одной части АСР на другую (например, изменение положения регулирующего органа или задатчика).
1.4. В процессе наладки необходимо знать статические и динамические характеристики АСР:
зависимость Урег = f (Хрег) выходной величины от входной в установившемся состоянии называется статической характеристикой;
зависимость, связывающая выходной сигнал с входным Урег (t) = f [Xрег (t)] в переходном режиме, возникающем при изменении входного сигнала, называется динамической характеристикой.
Статические свойства гидравлических регуляторов характеризуют следующие параметры:
KV - пропускная способность РО;
t, P, DР - диапазоны настройки;
s - зона пропорциональности;
g - ширина петли гистерезиса;
x - зона нечувствительности.
1.5. При нанесении возмущающего воздействия в АСР наблюдается переход из одного установившегося состояния в другое. Такой процесс носит название переходного процесса.
1.6. Переходные процессы в замкнутой системе регулирования показаны на рис. 2. С изменением коэффициента усиления регулятора Kр изменяются и динамические свойства и характеристики замкнутой системы.
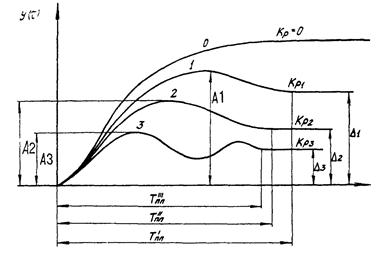
Рис. 2. Переходные процессы в замкнутой системе регулирования.
Если регулятор отключен или не работает, то коэффициент усиления Kр = 0. В этом случае при единичном ступенчатом изменении регулирующего воздействия регулируемая величина будет изменяться по кривой 0, которая точно соответствует разгонной характеристике объекта регулирования, зависящей от свойств объекта.
1.7. Перед включением регуляторов в режим автоматического регулирования его динамические характеристики должны быть настроены на динамические характеристики объекта регулирования.
Достигается настройка регулятора установкой коэффициента усиления Kр, который выбирается исходя из условия устойчивости системы и оптимальности переходного процесса.
В зависимости от выбранного коэффициента усиления Kр вид переходного процесса существенно меняется.
На рис. 2 возможные варианты переходных процессов в замкнутой системе, показанные кривыми 1 и 2, называются апериодическими, а переходный процесс, показанный кривой 3, периодическим или колебательным.
Основными показателями качества переходного процесса являются:
статическая ошибка регулирования - D;
динамическая ошибка - А1;
длительность переходного процесса - Тпп;
степень затухания периодического процесса - y.
С изменением коэффициента усиления Kр показатели качества переходного процесса меняются по-разному. С увеличением Kр динамическая ошибка и степень затухания уменьшаются, длительность переходного процесса сначала уменьшается, а затем снова начинает увеличиваться.
1.8. В АСР различают три вида переходных процессов (рис. 3) - устойчивый (а, г), на границе устойчивости (б) и неустойчивый (в).
К устойчивым относятся апериодические и затухающие колебательные переходные процессы (рис. 4)
К неустойчивым можно отнести колебательные переходные процессы с увеличивающейся амплитудой колебаний, а также системы, находящиеся на границе устойчивости, характеризующиеся постоянными незатухающими колебаниями регулируемого параметра.

Рис. 3. Колебательные переходные процессы в АСР:
а - устойчивый; б - на границе устойчивости; в - неустойчивый; г - при позиционном регулировании.
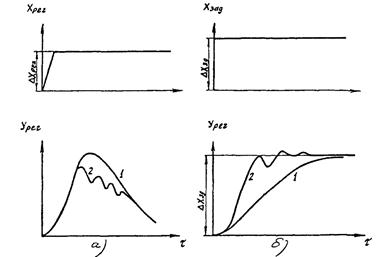
Рис. 4. Апериодические переходные процессы в АСР:
а - при воздействии регулирующим органом; б - при воздействии задатчиком; 1 - апериодический переходный процесс; 2 - колебательный процесс с апериодической составляющей
1.9. Степень затухания периодического процесса определяется как отношение разницы между первым максимумом А1 и вторым максимумом А2 к первому максимуму А1, т.е.:
![]() (1)
(1)
С изменением коэффициента усиления регулятора Kр степень затухания может меняться от 0 до 1.
Степень затухания y = 0, когда система находится на границе устойчивости, и y = 1 для апериодических переходных процессов.
1.10. Для оценки качества настройки АСР необходимо учитывать еще два показателя:
время регулирования tp - промежуток времени от начала переходного процесса до момента, когда Урег < x;
максимальное отклонение регулируемого параметра Аi при скачкообразном изменении нагрузки на 10 %.
При окончании переходного процесса регулируемая величина всегда будет отличаться от исходной на некоторое значение, называемое статической ошибкой, которое является органической неустранимой особенностью регуляторов с пропорциональным законом регулирования. Наличие статической ошибки объясняется тем, что перемещение регулирующего органа возможно только за счет отклонения регулируемой величины.
1.11. В рассматриваемых гидравлических РНПД значение коэффициента усиления Kр определяется расходом регулирующей среды, подаваемой на исполнительный механизм.
При этом на расход среды одновременно оказывают влияние следующие основные факторы:
характеристика регулирующего устройства;
характеристика исполнительного механизма;
характеристика источника рабочей среды;
наличие дополнительных усилителей в схеме регулятора.
Кроме того, на значение Kр оказывает влияние ряд второстепенных факторов, таких, как:
гидравлические характеристики соединительных линий;
взаимное расположение элементов регулятора.
1.12. Анализ конструктивных особенностей регулирующих приборов и исполнительных механизмов, а также опыта наладки регуляторов показывает, что рассматриваемые гидравлические РНПД, построенные на основе регулирующих приборов РД-3А и РД-3М, реализуют пропорциональный закон регулирования, который характеризуется тем, что значение перемещения регулирующего органа (РО) пропорционально отклонению регулируемого параметра от заданного значения и может быть выражено зависимостью
![]() (2)
(2)
где Хр - перемещение РО;
Kр - коэффициент усиления регулятора;
Узад - регулируемый параметр;
Хр - заданное значение регулируемого параметра.
1.13. Наибольшее применение в системах теплоснабжения находят гидравлические регуляторы системы ОРГРЭС, построенные по схеме РНПД с применением гидравлических регулирующих приборов РД-3М или выпускавшихся ранее приборов РД-3А, регулирующих клапанов РК-1М и РК-2 (на Dу = 50 и 80 мм, Ру = 1,6 МПа) или РК-1 (на Dy = 150 ÷ 1000 мм, Ру = 1,6 МПа и Ру = 2,5 МПа) и импульсных клапанов ИК-25 (на Dy = 25 мм, Ру = 1,6 МПа). Все упомянутые клапаны оснащены мембранными исполнительными механизмами (МИМ).
Для регулирования температуры используются регуляторы ПТ-1-1, ТМП, которые работают в комплекте с клапанами РК-1М, РК-2 и регуляторами РТ-ГВ, УРРД-М, ИК-25.
Описание конструкции приборов и клапанов и их технические характеристики приведены в приложениях 1 - 5.
1.14. По характеру информации о ходе технологического процесса гидравлические регуляторы относятся к системам по отклонению, которые формируют регулирующее воздействие по сравнению измеренного и заданного значений регулируемой величины.
1.15. По характеру заданного воздействия гидравлические регуляторы представляют собой стабилизирующие регуляторы, поддерживающие регулируемую величину на стационарном уровне.
1.16. По характеру регулирующего воздействия гидравлические регуляторы могут иметь как аналоговое исполнение, при котором выходной сигнал может принимать любое значение из заданного диапазона, так и релейное, при котором выходной сигнал может принимать два дискретных значения
2. ОБЛАСТЬ ПРИМЕНЕНИЯ ГИДРАВЛИЧЕСКИХ РЕГУЛЯТОРОВ
2.1. Гидравлические регуляторы наиболее полно отвечают требованиям и условиям эксплуатации систем централизованного теплоснабжения, которые используют в качестве теплоносителя воду.
Характерной особенностью системы теплоснабжения как объекта автоматизации является то, что в них требуется массовое применение наиболее простых и надежных регуляторов для поддержания в оборудовании источников тепла, сетевых трубопроводах тепловых сетей и системах теплопотребления заданных значений давления, перепадов давлений, расхода, уровня и температуры теплоносителя. При этом регулирование указанных характеристик происходит в системах с расходом теплоносителя от 0,5 до 10000 м3/ч и более.
Необходимо также надежно защищать оборудование тепловых сетей и источников тепла от повышенного давления и гидравлических ударов, осуществлять быструю и плотную рассечку тепловых магистралей на гидравлически изолированные зоны в случае прекращения циркуляции и перехода к статическому режиму.
2.2. Предпочтительное применение гидравлических регуляторов определяется тем, что они позволяют обеспечить:
надежную работу в помещениях с высокой влажностью и температурой (тепловых камерах, центральных тепловых пунктах - ЦТП, индивидуальных тепловых пунктах - ИТП с подмешивающими и подкачивающими насосами);
независимость работы автоматики от внешнего источника энергии;
достижение любой необходимой скорости перемещения РО и создания повышенных усилий для обеспечения его герметичности при закрытии;
использование регулирующих клапанов условным диаметром от 50 до 1000 мм при однотипном комплекте регулирующих приборов;
изменение при наладке и эксплуатации скорости перемещения РО (в отличие от исполнительных устройств с электроприводами, имеющими постоянную скорость).
3. РЕКОМЕНДАЦИИ ПО ВЫБОРУ РЕГУЛЯТОРОВ
3.1. Выбор регулятора осуществляется в зависимости от сложности и ответственности объекта регулирования и требований к точности поддержания значений регулируемых параметров.
3.2. Регуляторы прямого действия (приложения 6 - 9) просты по устройству, надежны, имеют меньшую стоимость по сравнению с регуляторами РНПД того же назначения, работают без потерь рабочей среды. Вместе с тем они обладают невысокой чувствительностью, развивают незначительные перестановочные усилия для управления РО и не изготавливаются на условные диаметры более 100 мм.
Регуляторы прямого действия (РР, РД и др.) применяются в тех случаях, когда чувствительный элемент развивает достаточное усилие для непосредственного перемещения РО. Это, как правило, имеет место в АСР тепловых пунктов потребителей тепловой энергии.
3.3. Регуляторы непрямого действия (например, РД-3М с РК-1) применяются в тех случаях, когда требуется получить высокую точность поддержания регулируемого параметра и обеспечить большие перестановочные усилия РО регулирующих клапанов больших условных диаметров, применяемых на магистральных трубопроводах, подкачивающих насосных станциях (ПНС), устройствах технологической защиты и др.
3.4. По способу реализуемых законов регулирования гидравлические регуляторы подразделяются на позиционные и пропорциональные.
Позиционные регуляторы работают по принципу «открыто - закрыто». При их наладке необходимо соблюдать условие: DУmax ≤ DУдоп, т.е. максимальное отклонение регулируемого параметра от среднего заданного значения, на которое настроен регулятор, не должно превышать допустимых значений параметра. Для обеспечения этого условия пропускная способность Kv РО при его открытии должна превышать максимально возможное возмущение по нагрузке.
Позиционные регуляторы могут применять для регулирования температуры в системах горячего водоснабжения (рис. 5). Применение их осуществляется, как правило, в комплекте с регулирующими клапанами с условными диаметрами не более 80 мм.
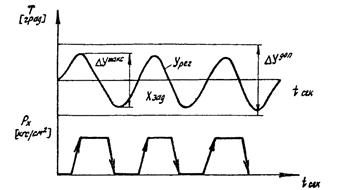
Рис. 5. График процесса регулирования температуры ГВС регулятором ПТ-1
При более жестких требованиях к АСР, например при нежелательности автоколебательных режимов, возникающих в АСР с позиционным регулятором, целесообразно применять пропорциональные регуляторы (П-регуляторы) прямого или непрямого действия.
Особенностью П-регулятора является наличие статической ошибки регулирования.
При недостаточной реакции регулятора на внутренние и внешние возмущения в АСР используются гидроускорители (рис. 6) - перепускные клапаны ИК-25 или другого типа; в этом случае увеличиваются скорость регулирования и коэффициент усиления регулятора Kp и уменьшается статическая ошибка.
Значение Kр подбирается с помощью дросселей, устанавливаемых на линии Рх после гидроускорителя и линии Рр до гидроускорителя.
Предварительный расчет диаметра дросселей проводится для схем АСР, в которых предусмотрены дополнительные усилители - клапаны ИК-25 или другого типа.
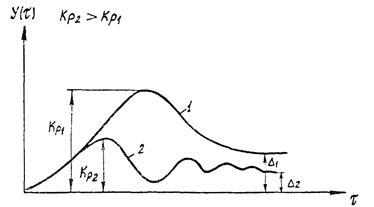
Рис. 6. Переходный процесс в замкнутой системе регулирования с гидравлическим регулятором:
1 - без гидроускорителя; 2 - с гидроускорителем ИК-25
Расчет диаметров дросселей других элементов АСР необходим при проектировании и наладке АСР, как правило, на насосных станциях тепловых сетей, где имеются устройства технологической защиты. В этом случае с помощью дросселей задается скорость и очередность закрытия клапанов на подающем и обратном трубопроводах.
В общем случае при срабатывании устройства защиты с помощью дросселей должно быть обеспечено заданное время перемещения РО. Диаметр дросселя управляющего клапанка регулирующих приборов (например, РД-3М и РД-3А) заранее не рассчитывается и подбирается во время наладочных работ
При наладке АСР применение дросселей обеспечивает получение значения Kр, которое обеспечивает получение требуемого закона регулирования (переходного процесса) и не вызывает возникновения в трубопроводах и оборудовании волновых процессов с недопустимыми амплитудами колебаний давления.
3.6. Проходное сечение РО клапана F (мм2) во время работы можно определить по формуле
![]() (3)
(3)
где G - расход среды через регулирующий клапан, кг/ч;
a - коэффициент пропускной способности клапана (например, для клапанов РК-1 a = 0,5);
r - плотность воды при рабочей температуре, кг/м3;
DР - перепад давлений на РО клапана, кгс/см2.
При расчетах можно принимать DР как перепад давлений на клапане в целом.
По площади проходного сечения определяется ход РО клапана на открытие X.
Для плоских тарельчатых затворов без профилированных окон максимальный ход затвора на открытие можно определять по упрощенной формуле
![]() (4)
(4)
где d - диаметр отверстия седла.
Если полученный ход РО меньше максимального значения хода РО рассматриваемого клапана, то он находится в регулирующем режиме.
По приведенным формулам необходимо рассчитать значения ходов всех клапанов АСР при номинальном расходе среды на каждом клапане.
По значению хода и полному объему гидропривода можно определить объем воды, который необходимо подать в гидропривод для закрытия РО каждого клапана из его рабочего положения.
Секундный расход воды в управляющих линиях АСР qх, который подается в гидропривод для перемещения РО на определенный ход за определенное время, определяется требуемой скоростью перемещения РО клапана, удельным объемом гидропривода на 1 мм хода gх и значением хода на закрытие.
Например, для клапана РК-1 на условный диаметр 700 мм значение qx = 0,4 м3 на 1 мм хода.
![]() (5)
(5)
3.7. Составляется баланс основных усилий в приводе регулирующего клапана
Qпр = Qп + Qг, (6)
где Qпр - усилие развиваемое гидроприводом;
Qn - усилие на затворе от перепада давлений;
Qг - усилие от рычага с грузом или от возвратной пружины, приведенное к оси штока.
По значению усилия привода и эффективной площади мембраны привода определяется значение командного сигнала Рх.
![]() (7)
(7)
На основании опыта эксплуатации клапанов РК-1 можно сказать, что в течение всего хода гидропривода на закрытие давление Рх в гидроприводе меняется весьма незначительно и можно принять его постоянным, равным рассчитанному.
3.8. В случае, когда в АСР входят дополнительные усилители, определяется диаметр дросселя (мм), необходимого для перемещения РО клапана за определенное время на определенный ход:
 (8)
(8)
где рр - давление в источнике рабочей воды, м вод. ст.;
Рх - давление, м вод. ст.;
qх - удельный расход, м3/ч.
Следует учитывать, что при значительном увеличении коэффициента усиления регулятора Kр, значение которого прямо пропорционально зависит от диаметра дросселя, переходный процесс в АСР приобретает колебательный неустойчивый характер.
3.9. Конструктивная характеристика всех исполнительных органов, используемых в системах теплоснабжения, выполняется пропорциональной в функции «ход штока - расход».
Реальная расходная характеристика РО зависит от соотношения сопротивления РО и сопротивления всей системы.
Расход теплоносителя через регулирующий клапан при полном открытии проходного сечения РО можно определить по формуле
 (9)
(9)
где Р1 - давление в подающей линии;
Р2 - давление в обратной линии;
SАБ - сопротивление абонентской установки;
SK - сопротивление РО.
При прикрытии, уменьшении проходного сечения РО расход в системе уменьшится и составит
 (10)
(10)
где ![]() - новое сопротивление
РО.
- новое сопротивление
РО.
На основании расчетов и опытных данных можно построить график изменения относительного расхода теплоносителя Q1/Q от степени открытия проходного сечения РО и влияния на относительный расход соотношения сопротивления местной системы и сопротивления РО SАБ/SK.
На рис. 7 приведены зависимости относительного расхода теплоносителя, проходящего через РО при различных значениях отношения пропускной способности РО KVУ к пропускной способности трубопровода KVT
![]() (11)
(11)
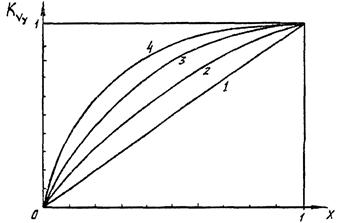
Рис. 7. График расходной характеристики РО
В случае, когда РО рассчитан на расход, близкий к требуемому, причем значение n близко к 1, расходная характеристика будет близка к расчетной расходной характеристике РО (линия 1 на рис. 7). При увеличении значения коэффициента п, что наблюдается, когда сопротивление системы SАБ превышает сопротивление SK, вид реальной расходной характеристики будет меняться так, как показано на рис. 7 линиями 2 - 4. При некоторых значениях коэффициента n РО оказывает влияние на расход только в начале своего хода на открытие, а расходная характеристика РО имеет очень неблагоприятный вид, что затрудняет процесс регулирования или вообще делает его невозможным. Приемлемая для АСР расходная характеристика РО показана линиями 1 и 2. Для получения расходной характеристики РО, приближающейся к линии 1, необходимо, чтобы сопротивление РО было значительно больше сопротивления системы.
В этом случае, если принять сопротивление системы бесконечно малым по сравнению с сопротивлением РО, получим соотношение
 (12)
(12)
Из этого соотношения видно, что изменение расхода среды Q, проходящей через РО, зависит только от изменения сопротивления РО клапана, т. е имеет вид, близкий к конструктивной характеристике РО клапана, показанной линией 1.
На основании соотношения можно сделать вывод, что для получения приемлемой реальной расходной характеристики РО следует:
исполнительные устройства - регулирующие клапаны выбирать с повышенным гидравлическим сопротивлением, чтобы погасить в них ее избыточное давление;
если сопротивление РО неизвестно, выбирать регулирующие клапаны по условной пропускной способности клапана и расходу теплоносителя в системе, а не по условному диаметру трубопровода.
4. ЛАБОРАТОРНАЯ ПРОВЕРКА РЕГУЛИРУЮЩИХ ПРИБОРОВ
4.1. Гидравлические управляющие приборы АСР перед установкой на объект рекомендуется проверять в лаборатории с целью определения их исправности.
Лабораторная проверка включает в себя:
наружный осмотр;
проверку на плотность;
снятие статических характеристик;
настройку на рабочий параметр
4.2. Лабораторная проверка приборов должна проводиться на специальном стенде. Стенд должен быть оборудован унифицированной разводкой рабочей воды для разных типов приборов давлением не менее 0,2 МПа, а также иметь источник импульсного давления, подаваемого на чувствительный элемент (ЧЭ), не менее верхнего предела настройки проверяемого прибора.
Пример стенда для лабораторной проверки регулирующих приборов РД-3А, РД-3М, ПТ-1 (ТМП, ПРТ-1) приведен на рис. 8.
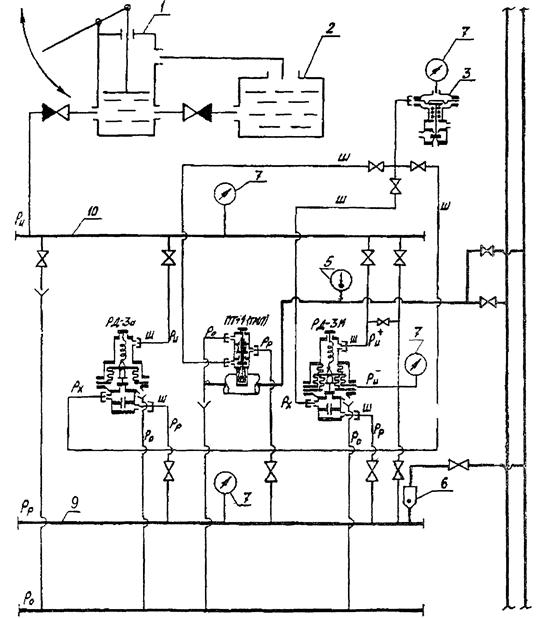
Рис. 8. Стенд для лабораторной проверки гидравлических регуляторов:
1 - импульсный насос, 2 - аккумуляторный бачок, 3 - клапан ИК-25; 4 - стойка с регуляторами (РД-3М, РД-3А, ТМП) (на схеме не показан); 5 - термометр; 6 - фильтр; 7 - манометр; 8 - вентиль 1/2"; 9 - коллектор рабочей воды (Æ 1", L = 700 мм); 10 - импульсный коллектор (Æ 2", L = 700 мм); Ш - шланг резиновый с кордом (dн = 20 мм, dв = 10 мм)
4.3. Во время наружного осмотра производится очистка наружных поверхностей приборов от грязи, промывка водой внутренних поверхностей, а также устранение повреждений окраски.
4.4. При проверке на плотность приборов РД-3А и РД-3М следует придерживаться такой последовательности операций:
заполните прибор водой, для чего залейте водой плюсовую камеру ЧЭ через штуцер до тех пор, пока из плюсовой линии не потечет вода без пузырьков воздуха; таким же образом заполните минусовую камеру;
подсоедините плюсовую и минусовую камеру к импульсному коллектору и создайте одновременно в обоих камерах прибора испытательное давление, не более 1,6 МПа;
убедитесь в том, что в течение 5 мин. отсутствуют течи в местах соединений и нет заметного уменьшения давления;
снимите давление с прибора;
подайте в плюсовую камеру прибора давление, равное верхнему пределу настройки проверяемого прибора;
проверьте герметичность сильфона (нарушение герметичности обнаруживается по потоку воды, вытекающему из минусовой сильфонной камеры) через штуцер слива;
проверка на плотность других типов регулирующих приборов (преобразователей) проводится по техническому описанию (ТО) на прибор.
4.5. Статическая характеристика прибора - это зависимость командного давления Рх от изменения измеряемого параметра Ри. Должны быть определены характеристики прямого и обратного хода.
Характеристика прямого хода определяется при изменении измеряемого параметра Ри в пределах диапазона настройки от минимального значения до максимального, к каждой промежуточной точке необходимо приближаться со стороны меньших значений параметра.
Характеристика обратного хода определяется при изменении параметра Ри от максимального значения до минимального, к каждой промежуточной точке нужно приближаться со стороны больших значений параметров. Характеристика обратного хода определяется от конечной точки характеристики прямого хода.
Характеристика прибора позволяет:
судить о люфтах, заедании золотника клапанка;
определить крутизну характеристики, ширину петли гистерезиса, зону пропорциональности, зону нечувствительности.
При определении характеристики водой заполняется плюсовая камера и в нее подается импульсное давление.
Характеристика прибора определяется следующим образом:
измеряется значение параметра Ри, задаваемое прибору через определенные, желательно равные интервалы, в пределах диапазона настройки прибора (порядка 8 интервалов); в промежуточных точках записываются значения командного давления Рх. По полученным значениям строится статическая характеристика регулятора Рх = f (Ри).
Аналогично строится характеристика для регуляторов температуры ТМП, ПТ-1 и др.
Пример статической характеристики регулирующего прибора РД-3А показан на рис. 9.
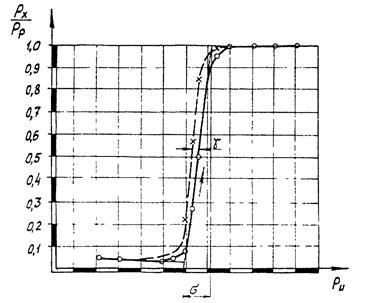
Рис. 9. Статическая характеристика регулирующего прибора РД-3А
4.6. Для настройки прибора РД-3М
(РД-3А) на рабочий параметр при одноимпульсном регулировании необходимо
регулируемый параметр (Ри) подать на ЧЭ прибора через штуцер ![]() . При
двухимпульсном регулировании по перепаду давлений - большее (плюсовое) давление
подается через штуцер
. При
двухимпульсном регулировании по перепаду давлений - большее (плюсовое) давление
подается через штуцер ![]() , а меньшее (минусовое) - через штуцер
, а меньшее (минусовое) - через штуцер ![]() .
.
Для защиты сильфонного блока от перегрузки на стенде между импульсными линиями должен быть установлен уравнительный вентиль. После заполнения импульсных камер закрывают уравнительный вентиль. Перепад устанавливают, открывая игольчатый клапан на минусовой линии и сбрасывая избыток давления в дренажную линию.
Настройка на рабочий параметр других типов приборов производится по техническому описанию на прибор
5. ТЕХНИЧЕСКИЕ ТРЕБОВАНИЯ ПРИ МОНТАЖЕ ГИДРАВЛИЧЕСКИХ РЕГУЛЯТОРОВ И ИХ ЭЛЕМЕНТОВ
5.1. Монтаж средств и приборов АСР должен производиться в соответствии с рабочими чертежами проектов, выполненных согласно отраслевым нормам.
5.2. Гидравлические соединительные линии к приборам и исполнительным устройствам и средствам автоматизации делятся на:
питающие линии, по которым рабочая среда подводится к регулирующим приборам;
командные линии, по которым передаются команды (сигналы) к исполнительным устройствам;
сливные линии, по которым рабочая среда сливается (сбрасывается) в дренаж или в обратный трубопровод при бессливных схемах;
импульсные линии, по которым передаются сигналы от контрольных точек объекта регулирования к регулирующим приборам.
5.3. Трубы для монтажа гидравлических соединительных линий должны применяться в соответствии с проектом.
В общем случае рекомендуется применять стальные водогазопроводные оцинкованные трубы обыкновенные и легкие по ГОСТ 3262-75:
для прокладки импульсных линий трубы с условным проходом 8; 10 и 15 мм;
для прокладки питающих командных линий трубы с условным проходом 15 мм;
для прокладки сливных линий трубы с условным проходом 15; 20 и 25 мм (25 мм при прокладке общей дренажной линии от нескольких регулирующих приборов);
для прокладки питающих и командных линий от дополнительных усилителей (клапанов ИК-25) трубы с условным проходом 25 мм.
5.4. Гидравлические соединительные линии должны прокладываться в соответствии с проектом по кратчайшим расстояниям, вдоль стен, перекрытий и трубопроводов, в местах, доступных для монтажа и обслуживания, с минимальным количеством поворотов.
5.5. Дренажные (сливные) линии и коллекторы следует прокладывать с уклоном 1:10.
5.6. Все гидравлические соединительные линии должны иметь маркировку. Маркировка наносится на бирки в точном соответствии с маркировкой по проекту.
5.7. Гидравлические соединительные линии следует прокладывать в помещениях с температурой не ниже 5 °С.
Следует принять меры против замерзания воды в дренажных коллекторах и на выходе из них.
5.8. В точках отбора сигналов на соединительных линиях устанавливаются запорные вентили. На командных линиях следует устанавливать шаровые или пробковые краны. Места врезки соединительных линий в трубопроводы должны находиться в местах, где исключается завоздушивание этих линий, а также попадание большого количества загрязнений.
5.9. Соединительные линии после проведения монтажных работ следует проверить на плотность и прочность методом опрессовки пробным давлением 1,25 рабочего в системе (МПа), но не менее чем
рр = рр + 0,3. (13)
Перед проведением опрессовки все линии следует подвергнуть промывке водой и внешнему осмотру с целью обнаружения дефектов монтажа.
5.10. Размещение элементов ГАСР при монтаже и их взаимное расположение должны производиться в соответствии с проектом и положениями, изложенными в данном разделе.
Монтаж элементов гидравлических регуляторов должен обеспечивать свободный доступ к приборам, запорным устройствам и элементам настройки.
5.11. Монтаж гидравлических регулирующих приборов должен производиться с учетом влияния гидростатического давления воды в соединительных линиях на работу и настройку регуляторов.
Высота расположения регулирующего прибора (м) по сравнению с расположением ИМ исполнительного устройства не должна превышать значения определяемого по формуле
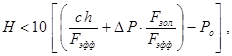 (14)
(14)
где 10 - коэффициент, учитывающий размерность;
с - жесткость возвратной пружины, кгс/мм;
h - предварительное натяжение возвратной пружины, мм;
DР - перепад давлений на полностью открытом РО исполнительного устройства, кгс/см2;
Fзол - неразгруженная площадь РО исполнительного устройства, см2;
Fэфф - эффективная площадь мембраны исполнительного механизма (ИМ), см2;
Рo - давление рабочей среды в дренажных магистралях, кгс/см2 (обычно равно 0,005 - 0,01 МПа).
В общем случае рекомендуется располагать гидравлические приборы и соединительные линии на уровне расположения ИМ клапана, отклоняясь от этого уровня не более чем на 0,5 м.
При монтаже ГАСР, содержащих клапаны РК-1 условным диаметром 1000 мм, которые имеют два привода, один из которых располагается над корпусом, а другой под корпусом клапана, элементы АСР следует располагать по оси трубопровода с допустимым отклонением вверх на 1 м.
5.12. Крепить регулирующие приборы и другие элементы ГАСР следует с помощью предусмотренных элементов крепления.
Клапаны ИК-25 и вентили крепятся на соединительных линиях.
5.13. При монтаже для удобства наладки и обслуживания элементов регуляторов, сокращения длины соединительных линий и уменьшения количества стыков рекомендуется группировать эти элементы в одном месте, как можно ближе один к другому.
5.14. Расстояние по горизонтали между регулирующими приборами и исполнительными устройствами следует принимать не более 20 м.
5.15. При монтаже регуляторов перепада давлений между импульсными линиями, подведенными к ЧЭ прибора, следует предусматривать уравнительный вентиль.
5.16. При выборе источника рабочей среды для гидравлических РНПД необходимо учитывать следующие факторы:
источник рабочей среды должен обеспечивать надежное снабжение регулятора водой с давлением от 0,2 до 1,0 МПа и температурой от 5 до 70 °С и незначительное отклонение рабочего давления независимо от режима работы регулятора. Допускается использовать источники с температурой рабочей воды выше 70 °С, но при этом следует охлаждать рабочую воду до требуемой температуры с помощью специальных теплообменников;
рабочая вода не должна содержать органических, минеральных и прочих примесей;
рабочая вода не должна содержать химических примесей, выделяющихся при контакте с элементами приборов и соединительных линий.
5.17. Штуцеры регулирующих приборов стыкуются с соединительными линиями с помощью гибких медных трубок длиной 500 мм, входящих в комплект поставки приборов, при этом для подсоединения к линиям, выполненным из газоводопроводных труб, используются специальные переходники с резьбами труб ½" на М 16 × 1,5 или на М 20 × 1,5.
Штуцеры регулирующих приборов имеют резьбу М 16 × 1,5 и М 20 × 1,5.
6. МЕТОДИКА НАЛАДКИ ГИДРАВЛИЧЕСКИХ РЕГУЛЯТОРОВ
6.1. Объем работы при настройке регуляторов зависит от сложности АСР и делится на четыре этапа:
подготовка к наладке;
настройка АСР на заданный параметр;
включение и отключение регулятора;
испытание регулятора.
6.2. При выполнении подготовительных работ перед наладкой следует:
ознакомиться со схемой соединений по технической документации и по месту;
ознакомиться с особенностями работы оборудования (условиями пуска и останова, поведением оборудования при переменных режимах, действием защит, основными возмущениями, влияющими на работу оборудования);
ознакомиться с заданными для объекта параметрами настройки регуляторов;
проверить регуляторы в лаборатории в соответствии с разд. 4 настоящих Методических указаний и заводскими инструкциями;
проверить правильность сборки регулирующего клапана, регулирующего прибора или регулятора (прямого действия), установить оптимальный ход усилительного элемента (УЭ) регуляторов РД-3А, РД-3М, проверить соответствие сборки УЭ схеме включения регулятора (см. приложения 4 - 9);
подобрать диаметр дросселя постоянного сечения. Диаметр дросселя постоянного сечения УЭ подбирается при наладке регулятора опытным путем, исходя из следующих соображений: чем больше диаметр дросселя, тем выше скорость регулирования. Но увеличение диаметра дросселя может привести к тому, что клапан будет открываться недостаточно быстро. Оптимальное значение диаметра дросселя постоянного сечения определяется в зависимости от давления рабочей среды и должно быть выбрано таким, чтобы скорость регулирования как при закрытии, так и при открытии регулирующего клапана при равных возмущениях была одинакова;
определить характеристики регуляторов;
проверить исполнительные механизмы (ИМ) и РО;
определить характеристики РО (для вновь устанавливаемых РО);
продуть и опрессовать импульсные линии, проверить наличие давления рабочей среды (для регуляторов непрямого действия). По техническим данным среднесуточный эксплуатационный расход рабочей среды у приборов с дроссельным УЭ равен 30 кг/ч, с дискретным - 10 кг/ч. В схемах регулирования может предусматриваться сброс рабочей среды в дренаж (сливная схема) или возврат его в точку с пониженным давлением Ро того же объекта регулирования (бессливная схема). Сливная схема по сравнению с бессливной более проста и надежна в эксплуатации. Бессливная схема применяется, как правило, при отсутствии дренажных устройств и при дефиците рабочей среды. Следует учитывать, что осуществление бессливного варианта схемы возможно при наличии достаточного перепада давлений (не менее 0,2 МПа) между точками отбора рабочей среды и ее возврата от регулирующих приборов в трубопровод и исполнительного устройства с МИМ двустороннего действия;
проверить соответствие монтажа соединительных линий проекту;
определить статические характеристики OP;
определить динамические характеристики ОР (для новых АСР);
наладить систему измерений для автоматической записи параметров.
6.3. Настройка АСР на заданный параметр сводится к регулировке натяжения компенсационной пружины управляющего прибора с таким расчетом, чтобы регулируемый параметр установился равным заданному значению. Особенности наладки разных типов регуляторов приведены в приложениях 1 - 9.
6.4. Включение и отключение регулятора. Автоматическая система регулирования включается при работе технологического оборудования с постоянной нагрузкой при параметрах, равных или близких к номинальным для данной системы.
Проверяется правильность реакции регулятора на отклонения регулируемого параметра. Отклонения регулируемого параметра не должны выходить за допустимые пределы.
При включении (отключении) регулятора должно учитываться взаимное влияние автоматических регуляторов. Порядок их включения не должен нарушать режим работы технологического оборудования. Например, в схеме автоматизации насосной станции сначала включается защита от повышения давления (МСУ), затем устройство рассечки тепловой сети на гидравлически изолированные зоны, далее регуляторы давления «После себя», «До себя», «Подпитка теплосети».
В случае сомнения в правильности действия АСР необходимо проверить их работу. Для этого перевести АСР в положение «Ручное управление», нанести возмущение, переместив РО в сторону «Больше» («Меньше») на 10 - 15 % полного диапазона регулирующего воздействия.
После этого АСР переводится в режим автоматического регулирования. Нормально действующая АСР должна возвратить регулируемый параметр к заданному значению.
6.5. Испытания ГАСР проводятся в соответствии с «Методическими указаниями по проведению приемо-сдаточных испытаний гидравлической системы автоматического регулирования в системах теплоснабжения: РД 34.35.415-97» (М.: СПО ОРГРЭС, 1998).
Испытанием ГАСР завершаются наладочные работы. По результатам испытаний принимается решение о соответствии работы ГАСР предъявляемым требованиям, а также могут быть приняты решения о корректировке настройки регуляторов и проведении повторных испытаний.
Испытания ГАСР должны проводиться:
для объектов, вводимых в строй после монтажа или реконструкции, перед включением в работу после ее наладки;
для эксплуатируемых объектов - перед вводом в эксплуатацию ГАСР после изменения параметров настройки регуляторов, после восстановительного ремонта или замены элементов ГАСР, после аварий или технологических отказов в системе теплоснабжения, происшедших по причине неправильной работы элементов ГАСР, но не реже одного раза за отопительный сезон.
Объем работы при испытаниях зависит от сложности АСР и технологических особенностей оборудования.
Гидравлические регуляторы испытываются при типовых и характерных возмущениях (внутренних - РО и внешних - задатчиком) с оценкой качества переходных процессов.
Гидравлические регуляторы должны испытываться при следующих условиях:
оборудование находится в режиме, на который рассчитывался испытываемый регулятор;
испытываемый регулятор находится в работе и поддерживает заданное значение регулируемой величины;
регулируемый диапазон достаточен для устранения наносимых во время испытаний возмущений;
при работе на оборудовании нескольких регуляторов, связанных между собой технологическим процессом (рассечка на гидравлически изолированные зоны), в первую очередь налаживаются и испытываются регуляторы, которые устраняют возмущения, возникающие вследствие работы других регуляторов;
при включенных устройствах технологической защиты, предупреждающих о возникновении аварии в случае неправильной работы испытываемого регулятора (устройство защиты от повышенного давления, рассечка тепловой сети на зоны).
После окончания испытаний обрабатываются диаграммы самопишущих приборов в целях выявления наиболее сильных реакций оборудования на отдельные возмущения и характера устранения этих реакций регуляторами.
Опробование срабатывания рассечки и быстродействующих сбросных устройств (БСУ) производится два раза в год: после окончания отопительного сезона (в целях выявления дефектов элементов устройств защиты) и перед началом отопительного сезона (в целях определения работоспособности, правильности настройки и необходимой скорости срабатывания с задействованием всех электрических блокировок).
Дата испытаний должна заноситься в график опробования технологических защит и блокировок, а результаты испытаний - в оперативный журнал.
7. ТЕХНИЧЕСКОЕ ОБСЛУЖИВАНИЕ РЕГУЛЯТОРОВ
7.1. Регуляторы и устройства технологической защиты должны обслуживаться специально обученным персоналом в соответствии с местной инструкцией, составленной применительно к данному объекту регулирования.
7.2. Во время эксплуатации необходимо контролировать работу регуляторов, используя для этой цели самопишущие и показывающие штатные приборы.
7.3. Нормальная работа регуляторов характеризуется следующими признаками:
регулируемый параметр поддерживается в пределах зоны пропорциональности и нечувствительности;
давление рабочей среды (рр) находится в установленных пределах;
командное давление (Рх) находится в пределах, обусловливаемых характеристиками регулирующего клапана и объекта регулирования. Значение этого давления должно находиться в пределах 0,05 - 0,5 МПа (0,5 - 5,0 кгс/см2);
из сливных штуцеров регулирующих приборов с дроссельными УЭ всегда должен наблюдаться сброс рабочей среды, а с дискретным УЭ - периодически.
7.4. При периодическом осмотре, проводимом не реже одного раза в неделю, необходимо:
проверять стабильность и качество поддержания регулируемого параметра, используя самопишущие и показывающие приборы;
проверять отсутствие протечек через сальники и соединительные линии.
7.5. При профилактической проверке, проводимой один раз в месяц, необходимо:
продуть соединительные (импульсные) линии, промыть фильтр и отстойник, прочистить дроссель и движущиеся части УЭ от солевых и механических отложений;
подтянуть сальниковые уплотнения регулирующих клапанов и приборов, а в случае необходимости заменить набивку сальников;
проверить движущиеся части ИМ изменением командного давления с помощью регулирующих приборов или натяжением настроечной пружины для РПД, обеспечив перемещение РО на 1/4 рабочего хода, при этом РО должен перемещаться плавно, без рывков. (При данной проверке регулируемый параметр не должен превышать предельные значения. Для выполнения этого условия рабочий ход РО может быть уменьшен);
проверить герметичность импульсных линий, соединений и элементов регуляторов.
7.6. Планово-предупредительную проверку всех узлов и деталей следует проводить один раз в год (с полной разборкой приборов и исполнительных устройств).
8. ОСНОВНЫЕ ХАРАКТЕРИСТИКИ РЕГУЛЯТОРОВ
8.1. В рассматриваемых РНПД в качестве регулирующего устройства используются регуляторы давления РД-3А и РД-3М.
Несмотря на некоторые различия в конструктивном исполнении, оба прибора имеют одинаковые элементы конструкции, принцип работы и технические характеристики.
8.2. Основной частью ЧЭ являются разделительные сильфоны и один измерительный сильфон, который воспринимает давление или перепад давлений. Совместно с настроечным элементом - пружиной сильфоны образуют систему, реагирующую на изменение регулируемого параметра перемещением донышка измерительного сильфона.
Перемещение (мм) зависит от суммарной жесткости системы сильфонов и настроечной пружины и может быть определено по формуле
![]() (15)
(15)
где DР - отклонение регулируемого параметра, МПа;
Fэфф - эффективная площадь измерительного сильфона, мм2;
![]() - эффективная площадь
разделительного сильфона, мм2;
- эффективная площадь
разделительного сильфона, мм2;
Сс - суммарная жесткость разделительного и измерительного сильфонов, кгс/мм;
Спр - жесткость пружины настроечного элемента, кгс/мм.
Жесткость сильфонов и эффективная площадь принимаются для соответствующих сильфонов по ГОСТ 21482-76 и ГОСТ 22388-77.
В конструкции приборов отсутствуют элементы регулировки жесткости системы, сильфонов ЧЭ.
8.3. Основной частью настроечного элемента (задатчика) является пружина. В приборах РД-3А и РД-3М используется цилиндрическая винтовая пружина растяжения из проволоки круглого сечения. В конструкции предусмотрены элементы, позволяющие изменять жесткость настроечной пружины путем изменения количества рабочих витков пружины.
Жесткость пружины (кгс/мм) может быть определена исходя из приближенного уравнения
![]() (16)
(16)
где s - модуль сдвига, для стали s = 8000 кгс/мм2;
d - диаметр проволоки, мм;
D - средний диаметр навивки пружины, мм;
n - число рабочих витков.
8.4. В регуляторах РД-3А и РД-3М в качестве УЭ используются специальные управляющие клапанки золотникового типа. Типовые клапанки обоих приборов включают в себя одинаковые базовые элементы (см. приложения 1 и 2), используя которые можно осуществить сборку клапанка в нормально-открытом, нормально-закрытом и двухсопловом вариантах.
Конструкция клапанка позволяет в широких пределах изменять его пропускную способность, изменяя тем самым и коэффициент усиления прибора. Основным способом изменения пропускной способности является изменение диаметра отверстия дросселя клапанка. При наладке диаметр отверстия дросселя устанавливается от 0,2 до 0,5 мм, что обеспечивает изменение площади проходного сечения и пропускной способности в шесть раз. Не следует устанавливать диаметр отверстия дросселя клапанка менее 0,2 мм во избежание засорения отверстия примесями, содержащимися в воде.
Пропускную способность клапанка (кг/ч) можно определить по формуле
![]() (17)
(17)
где a - коэффициент пропускной способности клапанка, на основании опытных данных принимается равным 0,51;
F - площадь проходного сечения, мм2;
pр - давление в источнике рабочей среды, кгс/см2;
Рх - командное воздействие (давление в исполнительном механизме), кгс/см2;
r - плотность воды, кг/м3.
Если пропускная способность дросселя незначительна по сравнению с пропускной способностью клапанка, то это означает, что клапанок работает в релейном режиме «открыт - закрыт» со сравнительно небольшим расходом, значение которого определяется диаметром дросселя и перепадом давления на клапанке.
В прибор РД-3А может быть установлен специальный клапанок А4 конструкции ОРГРЭС, не имеющий дросселя и работающий в релейном режиме. Клапанок А4 имеет значительно большую пропускную способность по сравнению с типовым клапанком. Расходная характеристика клапанка А4 показана кривой 1 на рис. 10.
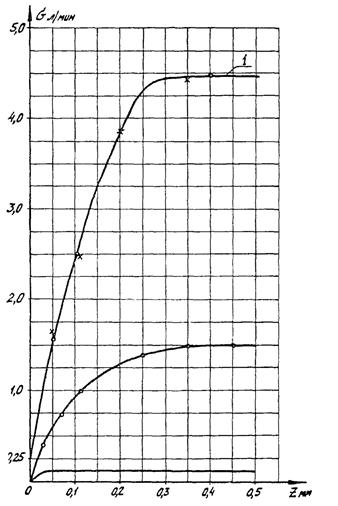
Рис. 10. Расходная характеристика клапанка усилительного элемента регуляторов РД-3А и РД-3М
Рабочие характеристики типового клапанка с дросселем позволяют применять их во всех типах регуляторов и устройствах защиты, описание которых дано в разд. 9.
В качестве исполнительных устройств в регуляторах могут применяться клапаны РК-1 с условными диаметрами от 50 до 1000 мм, которые в настоящее время выпускаются промышленностью.
Следует учитывать, что для клапанов с условными диаметрами 700 и 1000 мм пропускная способность типовых клапанков часто бывает недостаточной для обеспечения качественного регулирования. Для увеличения расхода управляющей среды в этих случаях следует применять схемы регуляторов с дополнительными усилителями или использовать клапанки А4.
8.5. В рассматриваемых РНПД в качестве исполнительного устройства используются регулирующие клапаны РК-1, оснащенные МИМ.
Основным преимуществом МИМ является простота устройства и изготовления, отсутствие трущихся поверхностей, возможность надежной работы при значительном загрязнении рабочей среды и деталей привода.
Недостатком привода МИМ является небольшой ход. Увеличить ход можно за счет применения формованных мембран или увеличения размеров всего привода.
Основными элементами МИМ являются чаши привода, мембрана и жесткий центр.
Мембрана привода может быть формованной пли плоской. В связи со сложностью изготовления формованных мембран они применяются только для приводов небольшого размера с диаметром заделки 200 - 250 мм.
Основным типом мембран на практике являются плоские мембраны, изготавливаемые из резинового листа с 1 - 2 тканевыми прокладками. Допускается изготавливать мембраны из транспортерной ленты толщиной 3 - 10 мм в зависимости от диаметра привода, однако такие мембраны имеют повышенную жесткость и в начальный период эксплуатации не обеспечивают требуемого хода.
Плоские мембраны следует устанавливать между фланцами чаш привода так, чтобы она имела предварительный напуск. Вытяжку заготовки мембраны для получения напуска и разметку отверстий можно выполнять по верхней или нижней чаше, нагрузив середину мембраны каким-либо грузом.
Усилие, развиваемое приводом, может быть определено по формуле
![]() (18)
(18)
Эффективная площадь мембраны МИМ может быть определена по формуле
![]() (19)
(19)
где dз - диаметр заделки мембраны по внутреннему диаметру фланцев чаш привода, см;
dц - диаметр жесткого центра привода, см.
Эта формула может применяться для приближенных расчетов привода.
Для более точных расчетов усилие, развиваемое приводом, следует определять по формуле
![]() (20)
(20)
где j - коэффициент эффективности привода при нулевом прогибе мембраны. Для плоских мембран различных толщин от 3 до 5 мм и диаметром заделки от 100 до 300 мм как с тканевыми прокладками, так и без прокладок, при соотношении dц/dз = 0,8 j = 0,78. Это значение действительно для давлений от 1 до 8 кгс/см2;
С - коэффициент неравномерности, учитывающий изменения эффективной площади в зависимости от прогиба мембраны;
DР - перепад давлений на мембране, кгс/см2;
F - площадь мембраны по диаметру заделки, см2.
Коэффициент С для мембран, установленных с напуском, при толщине 5 - 7 мм, наличии одной тканевой прокладки, значении хода (-0,8dз), давлении до 12 кгс/см2 может быть определен по формуле
 (21)
(21)
Здесь значение хода h принимается отрицательным, когда мембрана находится в нижнем положении, и положительным, когда мембрана занимает верхнее положение.
Расчет мембраны на прочность может быть выполнен по формуле
![]() (22)
(22)
где Рх - давление управляющей среды, кгс/см2;
Fк - кольцевая площадь мембраны, см2;
b - толщина мембраны, см;
[t] - допустимое напряжение на срез. В расчетах можно принимать:
при b = 5 мм [t] = 24 кгс/см2;
b = 7 мм [t] = 21 кгс/см2.
Ход мембраны h может быть принят не более 0,16 dз для плоских мембран и от 0,2 до 0,25 dз для формованных мембран.
9. ПРИНЦИП ДЕЙСТВИЯ И СХЕМЫ ВКЛЮЧЕНИЯ РЕГУЛЯТОРОВ
9.1. В данном разделе рассматривается принцип действия и схемы включения регуляторов АСР тепловых сетей на базе гидравлических регуляторов конструкции ОРГРЭС, источником энергии для которых является вода из тепловой сети или водопровода.
На основе гидравлических регулирующих приборов (см. п. 1.6) могут быть построены регуляторы, выполняющие следующие функции:
регулятор давления «После себя» - для поддержания постоянства давления в объекте регулирования (трубопроводе) после РО исполнительного устройства (ИУ);
регулятор давления «До себя» - для поддержания постоянства давления в объекте регулирования (трубопроводе) до РО исполнительного устройства;
регулятор перепада давлений (расхода) - для поддержания постоянной разности давлений, измеренной либо между подающим и обратным трубопроводами, либо на диафрагме или насосах;
регулятор температуры для закрытых и открытых (регулятор РТ - ГВ) систем горячего водоснабжения.
Кроме того, на основе основных гидравлических регуляторов могут быть построены другие специализированные АСР, обеспечивающие выполнение определенных технологических функций, и устройства технологической защиты тепловых сетей и потребителей при аварийном нарушении заданных режимов работы, сопровождающихся возникновением недопустимых значений регулируемого параметра.
Среди этих АСР можно выделить:
устройства технологической защиты (рассечка магистралей тепловых сетей на изолированные зоны; быстродействующие сбросные устройства различной конструкции для защиты оборудования источников тепла и тепловых сетей от повышения давления сверх допустимого при нестационарных переходных гидравлических режимах);
регуляторы подпитки (для поддержания постоянства давления в обратном трубопроводе);
регуляторы уровня (для поддержания постоянства уровня в открытых и закрытых емкостях).
9.2. Регулятор давления «После себя» (рис. 11) состоит из прибора П (РД-3М) с клапанком, собранным по схеме н. о. и регулирующего клапана К (РК-1).

Рис. 11. Принципиальная схема регулятора давления «После себя»
Регулируемая величина - давление
среды из точки ![]() поступает по импульсной линии на ЧЭ
прибора - сильфон сильфонной камеры, где создает усилие, пропорциональное
поступает по импульсной линии на ЧЭ
прибора - сильфон сильфонной камеры, где создает усилие, пропорциональное ![]() и эффективной
площади сильфона.
и эффективной
площади сильфона.
В то же время на сильфон в противоположном направлении действует усилие от пружины настроечного элемента (задатчика).
При векторном сложении этих усилий на ЧЭ возникает результирующее усилие, которое изменяется синхронно изменению регулируемой величины и может быть скомпенсировано изменением усилия пружины задатчика, т.е. ее растяжением или сжатием. Причем перемещение донышка сильфона ЧЭ пропорционально возникшей разнице усилий на сильфоне, которая в свою очередь пропорциональна изменению регулируемого параметра или рассогласованию по регулируемому параметру.
Перемещение донышка сильфона передается на золотник УЭ управляющего клапанка, который работает по принципу «сопло - заслонка».
Таким образом конструкция регулирующего прибора РД-3М обеспечивает трансформирование изменения регулируемого параметра в пропорциональное перемещение золотника управляющего клапанка, который в свою очередь формирует командное воздействие Рх, по фазе соответствующее изменению регулируемого параметра.
Золотник нормально открытого
клапанка при увеличении давления ![]() закрывает линию слива рабочей среды в
дренаж. Вследствие этого командное воздействие Рх, поступающее
на ИМ клапана, увеличивается, и ИМ перемещает РО, уменьшая проходное сечение
клапана К, что приводит к уменьшению давление после клапана.
закрывает линию слива рабочей среды в
дренаж. Вследствие этого командное воздействие Рх, поступающее
на ИМ клапана, увеличивается, и ИМ перемещает РО, уменьшая проходное сечение
клапана К, что приводит к уменьшению давление после клапана.
Другой регулятор давления «После себя» (рис. 12) состоит из прибора П (РД-3А или РД-3М) с управляющим клапанком, собранным по схеме н. з., двух импульсных клапанов У1 и У2 (ИК-25) и клапана К (Dy 1000 мм).
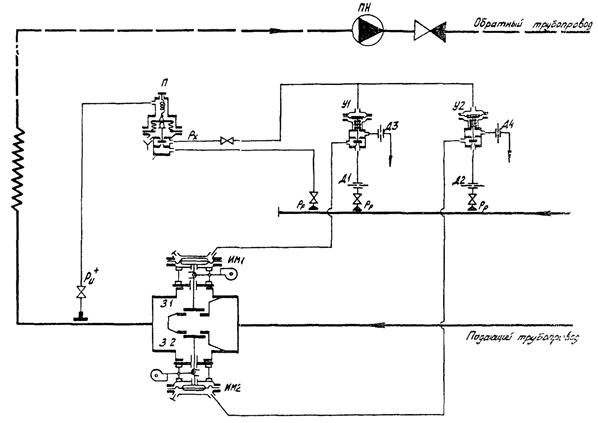
Рис. 12. Принципиальная схема регулятора давления «После себя» с клапаном Dy 1000 мм
Работает регулятор следующим образом:
при увеличении, например,
давления ![]() в
обратном трубопроводе свыше заданного управляющий клапанок прибора П
увеличивает объем слива рабочей среды, уменьшая тем самым командное воздействие
Рх, которое подводится на гидроприводы клапанов У1 и У2.
Вследствие уменьшения командного воздействия Рх клапаны У1 и
У2 переключаются на подачу рабочей среды в ИМ1 и ИМ2 клапана, что вызывает
увеличение давления Рх1. В результате затворы З1 и
З2 перемещаются на закрытие, проходное сечение клапана уменьшается, что
вызывает уменьшение давления
в
обратном трубопроводе свыше заданного управляющий клапанок прибора П
увеличивает объем слива рабочей среды, уменьшая тем самым командное воздействие
Рх, которое подводится на гидроприводы клапанов У1 и У2.
Вследствие уменьшения командного воздействия Рх клапаны У1 и
У2 переключаются на подачу рабочей среды в ИМ1 и ИМ2 клапана, что вызывает
увеличение давления Рх1. В результате затворы З1 и
З2 перемещаются на закрытие, проходное сечение клапана уменьшается, что
вызывает уменьшение давления ![]() в трубопроводе до заданного значения.
в трубопроводе до заданного значения.
При уменьшении давления ![]() в
трубопроводе по сравнению с заданным действие регулятора противоположно
описанному выше и вызывает увеличение давления в трубопроводе после клапана.
в
трубопроводе по сравнению с заданным действие регулятора противоположно
описанному выше и вызывает увеличение давления в трубопроводе после клапана.
9.3. Вновь разработанный регулирующий клапан РК-1 Dy 1000 мм, Ру = 2,5 МПа имеет условную пропускную способность, значительно превышающую пропускную способность клапана РК-1 на условный диаметр 700 мм, и конструкцию, в значительной степени унифицированную с этим клапаном, что обеспечивает полную совместимость с элементами регуляторов АСР тепловых сетей.
Клапан предназначен для работы в гидравлических регуляторах давления «До себя» и «После себя», перепада давлений, а также устройствах защиты.
Построение и работа гидравлических регуляторов, в состав которых в качестве исполнительного устройства входит этот клапан, а также их наладка в целом не отличаются от работы и наладки регуляторов, в состав которых входят клапаны РК-1 меньшего диаметра.
Особенностью конструкции клапана РК-1 Dy 1000 мм является наличие двух исполнительных механизмов и двух независимых регулирующих органов, причем работа двух исполнительных механизмов принципиально не отличается от работы одного привода других клапанов РК-1.
Из-за наличия двух приводов, один из которых располагается над клапаном, а другой под ним, появляется разница гидростатических давлений в ИМ. Влияние разницы гидростатического давления может быть усилено или уменьшено в зависимости от отметки расположения приборов АСР по отношению к нижнему и верхнему ИМ. Расстояние между верхним и нижним ИМ составляет 3 м, следовательно, разница давлений в них может достигать 0,03 МПа.
При проектировании и монтаже регуляторов влияние разницы давлений в ИМ должно быть по возможности ослаблено, что достигается расположением приборов ГАСР на отметке оси трубопровода. В этом случае в нижнем ИМ будет наблюдаться постоянное избыточное гидростатическое давление 0,015 МПа. Наличие этого давления в нижнем приводе не оказывает отрицательного влияния на работу регуляторов и проявляется в запаздывании открытия нижнего затвора по сравнению с верхним. Напротив, последовательное открытие затворов оказывает положительное влияние на протекание переходных гидравлических процессов, сглаживая возникающие при этом всплески давления в сети.
Влияние гидростатического давления в нижнем ИМ невелико, но должно учитываться при проектировании объектов тепловых сетей и выборе мест расположения приборов, входящих в состав регулятора. Расположение приборов на 3 - 4 м выше оси трубопровода может вызвать существенные нарушения в работе регуляторов.
Другим следствием наличия двух приводов является необходимость повышенного расхода рабочей среды для работы регуляторов. Увеличение расхода рабочей среды достигается введением в схемы регуляторов дополнительных усилителей - импульсных клапанов ИК-25. Клапаны этого типа имеют условную пропускную способность Kv - 6 т/ч, что значительно превышает требуемый для работы регуляторов расход рабочей среды.
Требуемая скорость регулирования обеспечивается установкой дроссельных шайб на линиях командного воздействия. Диаметр дроссельных шайб рассчитывается в соответствии с п. 3.5.
Клапан в заводском варианте поставки не может использоваться в бессливных схемах ГАСР, так как не имеет сальника на нижней чаше привода. При необходимости применения бессливных схем клапан может быть легко модернизирован путем установки унифицированного сальника с сальником клапана Dу 700 мм.
9.4. Регулятор давления «До себя» (рис. 13) состоит из прибора П (РД-3М) с клапанком, собранным по схеме н. з., и регулирующего клапана К (РК-1).
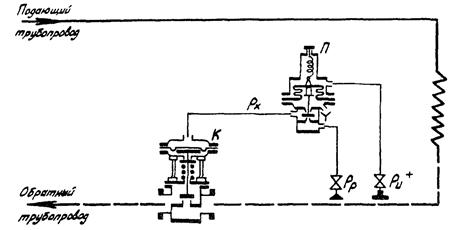
Рис. 13. Принципиальная схема регулятора давления «До себя»
Работа регулятора в целом
аналогична работе регулятора давления «После себя». Перемещение донышка
сильфона при изменении регулируемого параметра ![]() передается на золотник клапанка
и трансформируется в пропорциональное изменение командного воздействия Рх,
но при этом увеличение
передается на золотник клапанка
и трансформируется в пропорциональное изменение командного воздействия Рх,
но при этом увеличение ![]() приводит к увеличению слива рабочей среды
в дренаж и уменьшению управляющего воздействия Рх, и,
напротив, при уменьшении
приводит к увеличению слива рабочей среды
в дренаж и уменьшению управляющего воздействия Рх, и,
напротив, при уменьшении ![]() управляющее воздействие Рх
увеличивается, т.е. УЭ прибора формирует управляющее воздействие Рх
в противофазе по отношению к регулируемой величине.
управляющее воздействие Рх
увеличивается, т.е. УЭ прибора формирует управляющее воздействие Рх
в противофазе по отношению к регулируемой величине.
Вследствие такой работы УЭ
прибора РД-3М при увеличении ![]() происходит перемещение РО клапана К на
открытие, а при уменьшении
происходит перемещение РО клапана К на
открытие, а при уменьшении ![]() происходит перемещение на закрытие.
происходит перемещение на закрытие.
Регулятор давления «До себя» (рис. 14) состоит из прибора П (РД-3А или РД-3М), двух импульсных клапанов У1 и У2 (ИК-25) и регулирующего клапана К (Dy 1000 мм). В приборе П установлен управляющий клапанок, собранный по схеме н. о. Клапан К имеет два гидропривода ИМ1 и ИМ2 и два затвора З1 и З2.
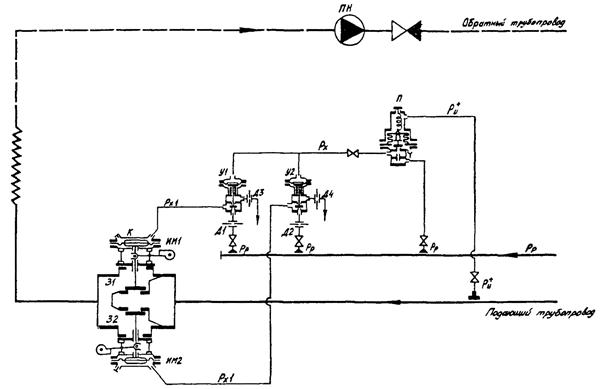
Рис. 14. Принципиальная схема регулятора давления «До себя» с клапаном Dv 1000 мм
Давление регулируемой среды ![]() поступает на
прибор П, который трансформирует изменение давления
поступает на
прибор П, который трансформирует изменение давления ![]() в переменное командное
давление Рх, которое подводится на ИМ клапанов У1 и У2.
Клапаны У1 и У2 необходимы в связи с большим суммарным объемом ИМ клапана Dy 1000 мм. Расход рабочей среды через управляющий
клапанок прибора П не может обеспечить требуемой скорости перемещения РО
клапана. Требуемая скорость перемещения РО обеспечивается установкой
дроссельных шайб Д1, Д2, Д3 и Д4. Диаметр шайб определяется расчетным путем при
наладке регуляторов.
в переменное командное
давление Рх, которое подводится на ИМ клапанов У1 и У2.
Клапаны У1 и У2 необходимы в связи с большим суммарным объемом ИМ клапана Dy 1000 мм. Расход рабочей среды через управляющий
клапанок прибора П не может обеспечить требуемой скорости перемещения РО
клапана. Требуемая скорость перемещения РО обеспечивается установкой
дроссельных шайб Д1, Д2, Д3 и Д4. Диаметр шайб определяется расчетным путем при
наладке регуляторов.
Работает регулятор следующим
образом: при повышении, например, давления ![]() в обратном трубопроводе свыше
заданного, управляющий клапанок прибора П уменьшает объем слива рабочей среды,
увеличивая тем самым командное воздействие Рх, которое
подводится на ИМ клапанов У1 и У2. Вследствие увеличения командного воздействия
Рх клапаны У1 и У2 переключаются на сброс рабочей
среды из ИМ1 и ИМ2 клапана, что вызывает уменьшение давления Рх1.
В результате затворы З1 и З2 перемещаются на открытие, проходное сечение
клапана увеличивается, что обеспечивает уменьшение давления
в обратном трубопроводе свыше
заданного, управляющий клапанок прибора П уменьшает объем слива рабочей среды,
увеличивая тем самым командное воздействие Рх, которое
подводится на ИМ клапанов У1 и У2. Вследствие увеличения командного воздействия
Рх клапаны У1 и У2 переключаются на сброс рабочей
среды из ИМ1 и ИМ2 клапана, что вызывает уменьшение давления Рх1.
В результате затворы З1 и З2 перемещаются на открытие, проходное сечение
клапана увеличивается, что обеспечивает уменьшение давления ![]() в трубопроводе до
заданного значения.
в трубопроводе до
заданного значения.
При уменьшении давления ![]() в
трубопроводе ниже заданного действие регулятора противоположно описанному выше
и вызывает увеличение давления в трубопроводах до клапана.
в
трубопроводе ниже заданного действие регулятора противоположно описанному выше
и вызывает увеличение давления в трубопроводах до клапана.
9.5. Регулятор давления «После себя» с устройством защиты по останову насосов (рис. 15) предназначен для поддержания давления в трубопроводе после клапана и плотного перекрытия прохода регулируемой среды при аварийном останове насосов и прекращении циркуляции в сети.
Регулятор давления состоит из прибора П1 (РД-3А или РД-3М) и двух перепускных клапанов У1 и У2 (ИК-25). Работает регулятор так же, как описано в п. 9.2, но в данном случае командное воздействие от прибора П1 к ИМ1 и ИМ2 клапана К проходит через перепускные клапаны У3 и У4.

Рис. 15. Принципиальная схема регулятора давления «После себя» с устройством защиты по останову насосов
Устройство защиты обеспечивает быстрое закрытие клапана при нарушении гидравлического режима в сети, что имеет место при аварийном останове перекачивающих насосов. Прибор П2 устройства защиты при нормальном рабочем гидравлическом режиме создает командное воздействие Рх2, поступающее на ИМ клапанов У3 и У4. При этом клапаны переключаются, обеспечивая герметичное перекрытие прохода рабочей среды из источника и открытие линии командного воздействия на гидроприводы ИМ1 и ИМ2 командного воздействия, поступающего от клапанов У1 и У2 и по фазе совпадающего с командным сигналом, вырабатываемым прибором П1.
При аварийном останове насосов давление Рх2 быстро увеличивается; при превышении предела настройки прибора П2 его управляющий клапанок переключается на сброс давления из гидроприводов клапанов У3 и У4. Клапаны переключаются, обеспечивая перекрытие линии командного воздействия от клапанов У1 и У2 и подачу рабочей среды с большим расходом из источника через клапаны У3 и У4 в приводы ИМ1 и ИМ2, что позволяет быстро и плотно закрыть затворы клапана З1 и З2, предотвращая повышение давления на стороне всасывания насосов выше допустимого.
При пуске насосов и понижении давления на стороне всасывания насосов Рх2 прибор П2 отключает устройство защиты. При этом включается в работу регулятор давления (РС-1 Dy 1000 мм), а рабочая среда будет сливаться из гидроприводов ИМ1 и ИМ2 через дроссели Д3 и Д4, что обеспечит за счет медленного открытия затворов З1 и З2 плавный переход к нормальному режиму.
9.6. Регулятор перепада давлений (расхода) (рис. 16) состоит из прибора П с клапанком, собранным по схеме н. о., и регулирующего клапана К (РК-1).
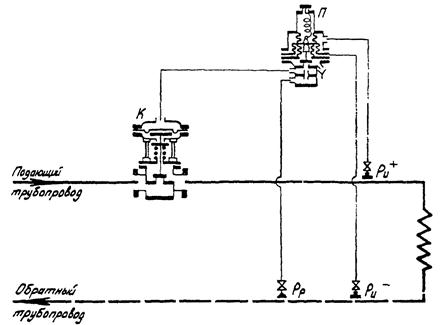
Рис. 16. Принципиальная схема регулятора перепада давлений
Отличием от описанных выше
регуляторов является то, что на ЧЭ прибора подводится давление ![]() и
и ![]() из двух точек
канала регулирования, а на донышке сильфона происходит векторное сложение трех
сил.
из двух точек
канала регулирования, а на донышке сильфона происходит векторное сложение трех
сил.
При этом действие сил на донышко
сильфона от давлений ![]() и
и ![]() может быть заменено действием их
разницы, т.е. регулируемым параметром для регулятора является перепад давлений
между двумя точками канала регулирования.
может быть заменено действием их
разницы, т.е. регулируемым параметром для регулятора является перепад давлений
между двумя точками канала регулирования.
В остальном регулятор работает так же, как регулятор давления «После себя».
9.7. Регуляторы температуры используются для автоматизации подогревателей ГВС, различного рода теплообменников, калориферов и др.
В качестве регулирующих приборов используются датчики температуры (преобразователи) ТМП (выпуск прекращен), ПТ-1-1, ПТ-1-2 и ПРТ-1. Преобразователи являются чувствительно-усилительными элементами гидравлических регуляторов температуры непрямого действия и применяются для закрытых систем ГВС, в качестве исполнительных механизмов к ним применяются регулирующие клапаны РК-1М, РК-2, УРРД-М и ИК-25 на Dу от 25 до 100 мм. Схема подключения приведена на рис. 17.
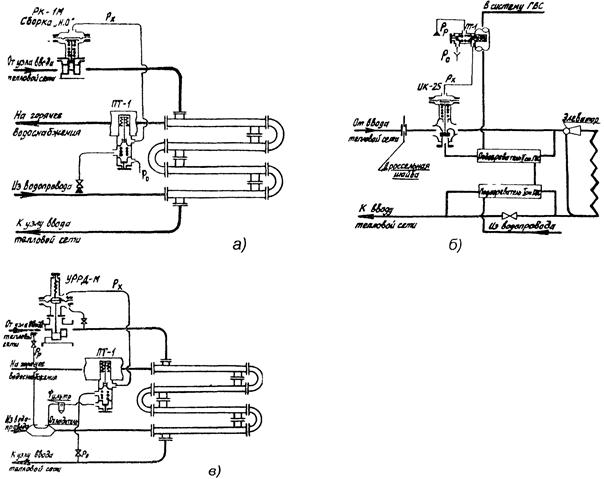
Рис. 17. Схемы включения преобразователей температуры в систему ГВС:
а - сливная; б - бессливная; в - с последовательным включением подогревателей ГВС с помощью приборов ПТ-1 и ИК-25
Для автоматизации открытых систем ГВС промышленностью выпускается регулятор РТ-ГВ (рис. 18).
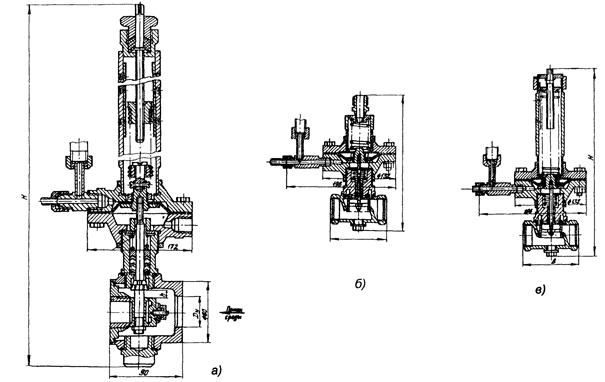
Рис. 18. Регулятор РТ-ГВ:
а - исполнительное устройство Dу 50 и 80 мм, б - исполнительное устройство Dу 20, 25; 32; 40 мм; в - устройство защиты Dу 20; 25; 32; 40 мм
Схема подключения РТ-ГВ показана на рис. 19.
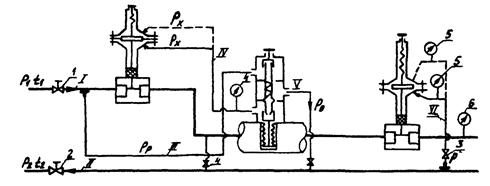
Рис. 19. Схема подключения РТ-ГВ (бессливная)
Для автоматического регулирования температуры в системах централизованного горячего водоснабжения отдельных зданий предназначен регулятор РТЦВГ.
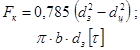
9.8. На рис. 20 приведена принципиальная схема АСР насосной станции на обратной магистрали тепловой сети. Профиль местности - понижающийся от источника тепловой энергии.
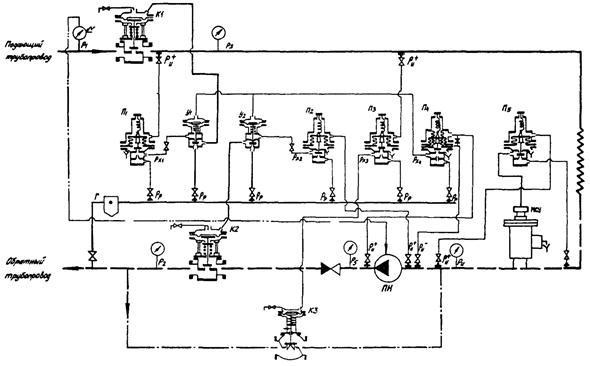
Рис. 20. Принципиальная схема автоматики и защиты насосной станции
Насосная станция оснащена следующими регуляторами:
давления «После себя» для стабилизации давления в подающей магистрали второй зоны (элементы П1 и К1);
давления «До себя» для стабилизации давления в обратной магистрата на стороне всасывания насосов (элементы П2 и К2);
давления «После себя» (подпитки) для поддержания давления в обратной магистрали при останове насосов, прекращении циркуляции и рассечке сети на изолированные зоны (элементы П3 и К3);
а также устройствами защиты:
УЗ4 для предотвращения повышения давления в зоне 2 (рис. 21) при останове подкачивающих насосов и прекращении циркуляции путем рассечки сети на две зоны (элементы П4, У1, У2, К1 и К2);
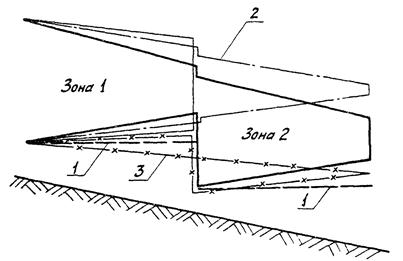
Рис. 21. Пьезометрический график тепловой сети
УЗ5 (быстродействующее предохранительное устройство) для предотвращения повышения давления в обратной магистрали сверх допустимого при отключении перекачивающих насосов или при прочих аварийных нарушениях режима работы тепловой сети, сопровождающихся быстрым повышением давления сверх допустимого, в том числе имеющего волновой характер;
УЗ6 (электроконтактный манометр ЭКМ1) для отключения перекачивающих насосов при понижении давления в обратной магистрали при понижении давления в подающей магистрали.
В данной тепловой сети возможны следующие нарушения гидравлического режима:
при отключении только подкачивающих насосов на обратной магистрали давление у потребителей в зоне 2 может превысить допустимое значение (линия 2 на рис. 21). Кроме того, при достаточно большой протяженности магистрали (5 - 8 км) в концевой части обратного трубопровода перед насосами вероятно возникновение инерционного повышения давления, носящего волновой характер (гидроудар);
при отключении только сетевых насосов на источнике тепла может произойти опрокидывание циркуляции в зоне 1 (линия 3 на рис. 21);
при отключении всех насосов статическое давление в зоне 2 может превысить допустимое значение (линия 1 на рис. 21) и также возможно возникновение гидроударов в обратной магистрали.
При нормальном режиме работы сети включены сетевые насосы на источнике тепла и подкачивающие насосы на обратной магистрали.
Из схемы видно, что в устройство защиты УЗ4 входят два прибора П4 (РД-3М), регулирующие клапаны К1 и К2 (РК-1) и перепускные клапаны У1 и У2 (ИК-25).
Давление Ри3 и Ри2 поступает на ЧЭ прибора П4 устройства защиты УЗ4, который воспринимает и контролирует перепад этих давлений.
Усилие от этого перепада превышает усилие настроечной пружины прибора П4. Вследствие этого золотник нормально открытого клапанка прибора перекрывает слив рабочей среды в дренаж и открывает поступление ее на ИМ импульсных клапанов У1 и У2. При этом затворы клапанов У1 и У2 находятся в нижнем положении (нижнее проходное сечение клапанов закрыто, верхнее открыто).
Устройство защиты срабатывает
при останове подкачивающего насоса. Давление при этом в точке ![]() повышается,
что приводит к переключению собранного по схеме н. о. управляющего клапанка
прибора П4 на сброс давления из ИМ клапанов У1 и У2. Импульсные клапаны ИК-25 при
этом переключаются, герметично перекрывая линию Рх от
приборов П1 и П2 и открывая подачу с большим расходом из источника рабочей
среды в ИМ клапанов К1 и К2. Вследствие этого РО полностью перекрывает
проходное сечение клапанов, обеспечивая рассечку подающей и обратной
магистралей.
повышается,
что приводит к переключению собранного по схеме н. о. управляющего клапанка
прибора П4 на сброс давления из ИМ клапанов У1 и У2. Импульсные клапаны ИК-25 при
этом переключаются, герметично перекрывая линию Рх от
приборов П1 и П2 и открывая подачу с большим расходом из источника рабочей
среды в ИМ клапанов К1 и К2. Вследствие этого РО полностью перекрывает
проходное сечение клапанов, обеспечивая рассечку подающей и обратной
магистралей.
В то же время регуляторы «До себя» и «После себя» находятся в режиме регулирования и выполняют функцию стабилизации давления в точках Ри1 и Ри2.
Например, при увеличении давления Ри1 поступает воздействие на сильфон ЧЭ прибора П1, создавая усилие, превышающее усилие пружины задатчика. Вследствие этого золотник нормально открытого клапанка прибора перекроет слив рабочей среды в дренаж и откроет поступление командного воздействия с давлением Рр через клапан У1 на ИМ клапана К1. Поступление среды в ИМ клапана К1 вызовет перемещение затвора клапана в сторону уменьшения проходного сечения РО и понижения давления Ри1 после клапана К1.
При уменьшении давления Ри1 откроется сброс среды из ИМ клапана К1 через клапанок прибора П1. Под действием перепада давлений на затворе клапана К1 и рычага с грузом произойдет перемещение затвора в сторону увеличения проходного сечения РО и увеличения давления в точке Ри1.
Таким образом регулятор давления «После себя» выполняет стабилизирующую функцию.
Регулятор давления «До себя» выполняет функцию стабилизации давления в обратной магистрали до насосов.
При нарушении нормального режима работы - отключение подкачивающих насосов давление в нижней зоне сети до насосов начнет быстро повышаться, а перепад давлений Ри3 и Ри2 уменьшится до нуля. Вследствие уменьшения перепада давлений нарушится баланс сил на ЧЭ прибора П4, а управляющий клапанок, собранный по схеме н. о., откроет сброс среды из ИМ клапанов У1 и У2 в дренаж. Клапаны У1 и У2 переключатся на подачу в ИМ клапанов К1 и К2 рабочей среды с большим расходом, а командные линии от приборов П1 и П2 окажутся перекрытыми. Клапаны У1 и К2 со скоростью, определяемой проходным сечением дросселей Д1 и Д2, закроются, обеспечивая плотную рассечку сети на две изолированные зоны. Скорость закрытия клапанов должна быть рассчитана таким образом, чтобы не вызвать в системе гидравлических ударов и обеспечить более раннее (на 10 - 15 с) закрытие клапана на подающей линии.
При отключении подкачивающих насосов в обратной магистрали наблюдается инерционное движение жидкости, которое вызывает быстрое повышение давления в зоне перед остановившимися насосами. В некоторых случаях это повышение давления имеет характер гидроудара и сопровождается быстрым (за 0,1 - 0,5 с) повышением давления до значения, намного превышающего допустимое для данной сети. Значение и скорость повышения давления могут быть определены расчетным путем.
Для защиты
сети от повышения давления, носящего характер гидроудара, необходимо
использовать мембранные сбросные устройства (МСУ) конструкции АО «Фирма
ОРГРЭС», характеристика которых приведена в таблице. Работает УЗ5 следующим
образом: давление ![]() поступает на ЧЭ прибора П5 при давлении в
магистрали, меньшем давления срабатывания МСУ, рабочее давление поступает через
прибор на гидропривод МСУ и удерживает его в закрытом положении. При быстром
повышении давления прибор П5 сбрасывает давление из гидропривода МСУ, что
обеспечивает его быстрое открытие. Сброс среды из обратной магистрали
препятствует возникновению гидроудара в сети при останове насосов. После
понижения давления прибор П5 переключается на подачу давления в гидропривод
МСУ, и сброс среды прекращается. Давление срабатывания МСУ должно быть больше
статического давления в сети.
поступает на ЧЭ прибора П5 при давлении в
магистрали, меньшем давления срабатывания МСУ, рабочее давление поступает через
прибор на гидропривод МСУ и удерживает его в закрытом положении. При быстром
повышении давления прибор П5 сбрасывает давление из гидропривода МСУ, что
обеспечивает его быстрое открытие. Сброс среды из обратной магистрали
препятствует возникновению гидроудара в сети при останове насосов. После
понижения давления прибор П5 переключается на подачу давления в гидропривод
МСУ, и сброс среды прекращается. Давление срабатывания МСУ должно быть больше
статического давления в сети.
|
Наименование |
Диаметр условного прохода Dy, мм |
Пропускная способность KV, м3/ч |
Условное давление регулируемой среды, МПа |
Температура регулируемой среды, °С |
Проходное сечение F, см2 |
Вид привода |
Назначение устройств |
|
МСУ-80 |
70 |
95 |
1,0 |
+ 80 |
38 |
МИМ |
Защита местных систем отопления |
|
МСУ-300 |
300 |
500 |
1,0 |
+ 80 |
226 |
МИМ |
Защита источников тепла, трубопроводов тепловых сетей, потребителей тепла |
После рассечки сети на две зоны в работу включаются регуляторы подпитки, обеспечивающие поддержание требуемых значений статического давления отдельно, в верхней и нижней зонах. Регуляторы подпитки работают как регуляторы давления «После себя». Регулятор подпитки верхней зоны размещается на источнике тепла и на схеме не показан, регулятор подпитки нижней зоны обеспечивает перепуск воды из верхней зоны в нижнюю.
При пуске сети после включения подкачивающих насосов возникает перепад давлений между точками Ри3 и Ри2. Этот перепад воспринимается ЧЭ прибора П4, а управляющий клапанок, собранный по схеме н. о., прекращает сброс среды и открывает поступление ее на ИМ клапанов У4 и У2. Клапаны переключаются, прерывают прямую подачу среды и открывают импульсные линии командного воздействия на ИМ клапанов К1 и К2 от приборов П1 и П2.
Регуляторы давления «До себя» и «После себя» включаются в работу и выводят клапаны К1 и К2 в режим регулирования.
Приложение 1
РЕГУЛИРУЮЩИЕ КЛАПАНЫ РК-1 (ИК-25)
1. Назначение и конструкция
Регулирующий клапан РК-1 (ИК-25) с односедельным неразгруженным РО и МИМ является исполнительным устройством гидравлических регуляторов непрямого действия.
В комплекте с регулирующими приборами РД-3М, РД-3А, ПТ-1, ТМП и другими клапаны составляют регуляторы, обеспечивающие поддержание заданных значений различных технологических параметров неагрессивных жидкостей и газообразных сред на объектах систем теплоснабжения и теплопотребления, а также защиту этих объектов при нарушении гидравлического режима.
Клапан ИК-25 может применяться как ускоритель в схемах регулирования давления и устройствах технологической защиты (рассечка) тепловых сетей для увеличения скорости срабатывания клапанов РК-1 с большим условным проходом, а также как разделительное трехходовое исполнительное устройство.
Технические данные регулирующих клапанов РК-1 на условные диаметры от 25 до 1000 мм приведены в таблице.
|
Тип |
Условный проход Dу, мм |
Условное давление регулируемой среды Ру, МПа |
Давление рабочей среды Рр, МПа |
Температура, °С |
Пропускная способность KV, м3/ч |
Относительная протечка, %, KV |
Ход S, мм |
Масса, кг |
|
|
регулируемой среды |
рабочей среды |
||||||||
|
ИК-25 |
25 |
1,6 |
1,0 |
180 |
70 |
6 ± 2 |
0 |
7 |
11,5 |
|
РК-1М |
50 |
1,6 |
0,2 - 1,0 |
180 |
70 |
25 ± 2,5 |
0,4 |
14 ± 1 |
13,0 |
|
РК-1М |
80 |
1,6 |
0,2 - 1,0 |
180 |
70 |
60 ± 6 |
0,4 |
18 ± 1 |
15,0 |
|
РК-2 |
50 |
1,6 |
0,2 - 1,0 |
180 |
70 |
25 ± 2,5 |
1,0 |
- |
25 ± 1,0 |
|
РК-2 |
80 |
1,6 |
0,2 - 1,0 |
180 |
70 |
60 ± 6,0 |
1,0 |
- |
40 ± 1,0 |
|
РК-1 |
150 |
1,6 |
0,2 - 1,0 |
180 |
70 |
250 |
0,01 |
31 ± 2 |
240 ± 10 |
|
РК-1 |
200 |
1,6 |
0,2 - 1,0 |
180 |
70 |
400 |
0,01 |
44 ± 3 |
345 ± 10 |
|
РК-1 |
250 |
1,6 |
0,2 - 1,0 |
180 |
70 |
600 |
0,01 |
50 ± 3 |
395 ± 10 |
|
РК-1 |
300 |
1,6 |
0,2 - 1,0 |
180 |
70 |
900 |
0,01 |
60 ± 3 |
890 ± 10 |
|
РК-1 |
400 |
1,6 |
0,2 - 1,0 |
180 |
70 |
1600 |
0,01 |
74 ± 3 |
1140 ± 20 |
|
РК-1 |
500 |
1,6 |
0,2 - 1,0 |
180 |
70 |
2500 |
0,005 |
86 ± 3 |
1700 ± 20 |
|
РК-1 |
600 |
1,6 |
0,2 - 1,0 |
180 |
70 |
3600 |
0,005 |
106 ± 3 |
2000 ± 20 |
|
РК-1 |
700 |
1,6 |
0,2 - 1,0 |
180 |
70 |
4900 |
0,005 |
130 ± 3 |
3200 ± 20 |
|
РК-1 |
700 |
2,5 |
0,2 - 1,0 |
180 |
70 |
,4900 |
0,005 |
130 ± 3 |
3800 ± 20 |
|
РК-1 |
1000 |
2,5 |
0,2 - 1,0 |
180 |
70 |
10000 |
0,005 |
130 ± 3 |
4752 ± 20 |
Принцип действия клапанов заключается в изменении расхода проходящей через него среды при изменении проходного сечения за счет перемещения затвора относительно седла в зависимости от изменения командного давления, поступающего на МИМ, которым они все оснащены от регулирующих гидравлических приборов.
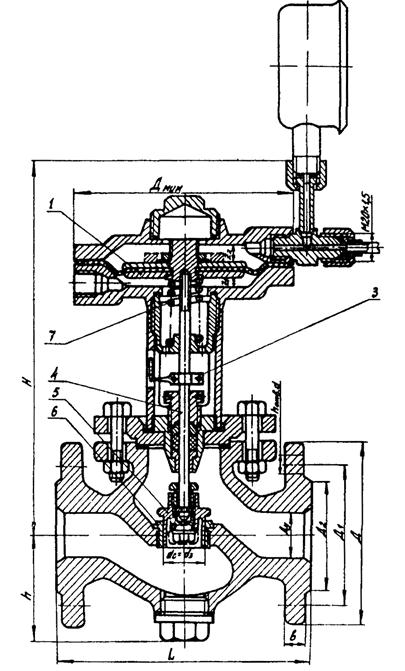
Рис. 1П1. Регулирующий клапан РК-2 Dy 50 ÷ 80 мм
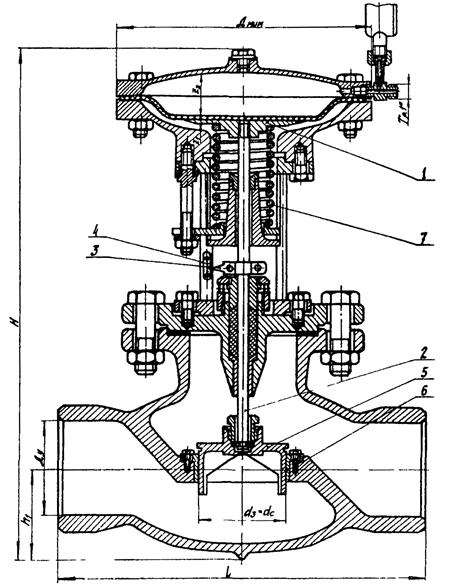
Рис. 1П2. Регулирующий клапан РК-1 Dy 150 ÷ 350 мм
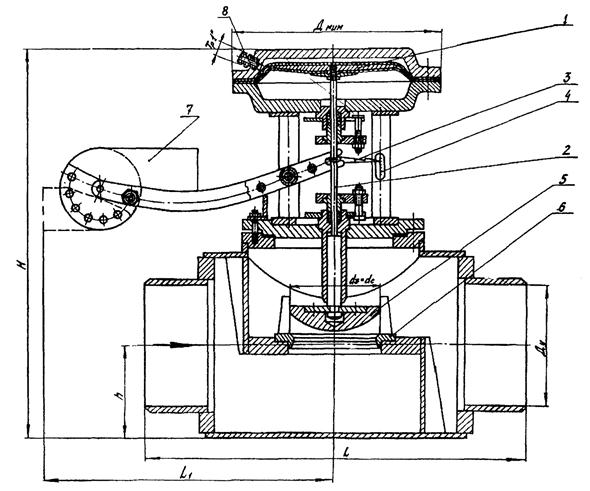
Рис. 1П3. Регулирующий клапан РК-1 Dy 400 - 700 мм:
1 - головка, 2 - пружинка; 3 - направляющая втулка с отверстиями для слива; 4 - клапанок; 5 - верхнее сопло, 6 - нижнее сопло; 7 - корпус; 8 - дроссель постоянного сечения
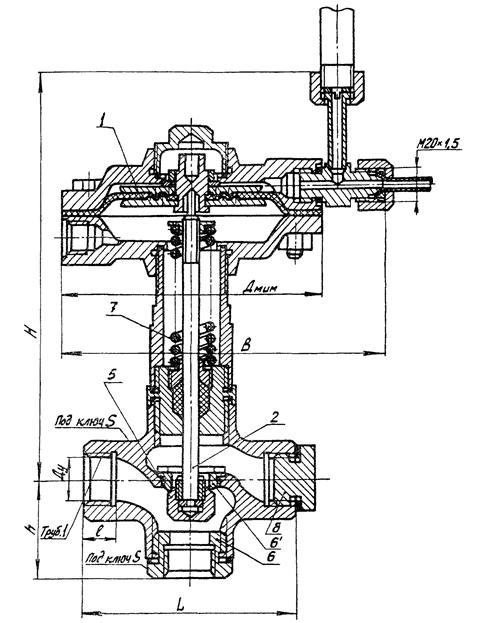
Рис. 1П4. Импульсный клапан ИК-25 Dу 25 мм
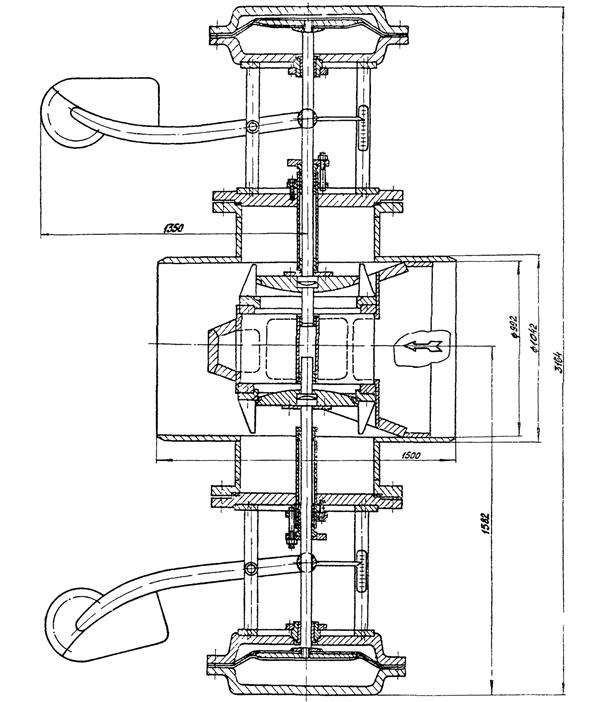
Рис. 1П5. Регулирующий клапан РК-1 Dy 1000 мм
По конструктивному исполнению основных узлов (корпуса, МИМ и РО) клапаны подразделяются:
по конструкции корпуса - на литье (рис. 1П1, 1П2, 1П4) и сварные (рис. 1П3, 1П5);
по материалу корпуса - на чугунные (СЧ 18) (см. рис. 1П1, 1П4) и стальные литые (25 Л) - см. рис. 1П2, стальные сварные из стали 20 и Ст. 3;
по присоединению к трубопроводу - на приварные (см. рис. 1П2 - 1П4), фланцевые по ГОСТ 12820-80 и муфтовые;
по возможности организации воздействия командного давления Рх - на одностороннего (см. рис. 1П1, 1П2, 1П4) и двустороннего (см. рис. 1П3) действия;
по противодействующему усилию - на пружинные (см. рис. 1П1, 1П2, 1П4) и грузовые (см. рис. 1П3, 1П5);
по схеме сборки РО - на закрывающие - нормально открытые (н. о.) и открывающие - нормально закрытые (н. з.).
Основная схема сборки РО - н. о. Однако с учетом особенностей некоторых объектов регулирования (деаэрационные установки, подпиточные линии и др.) конструкция клапанов с условным диаметром от 50 до 250 мм, удовлетворяющих большинство объектов такого рода, предусматривает возможность сборки их по схеме н. з. при оговаривании в заказе. Клапаны с условным диаметром более 300 мм собираются только по схеме н. о.
2. Особенности наладки
Для приведения хода клапана в соответствие с техническими данными необходимо:
обеспечить минимальное значение зазора, равное Z1 = 1 ÷ 3 мм, путем выворачивания жесткого центра (см. рис. 1П1, 1П2) относительно штока (если зазор отсутствует, то нет полного перекрытия проходного сечения седла);
выставить стрелку шкалы на ноль при полном перекрытии затвором седла;
обеспечить Z2 = s, где s - высота окна или полный ход клапана.
Затяжку сальниковых уплотнений следует производить таким образом, чтобы обеспечивать герметичность вывода штока при сохранении плавности и легкости его хода при перемещении вручную.
Для обеспечения полного открытия регулирующего клапана при малых перепадах давлений на РО необходимо увеличить степень поджатия возвратной пружины или развернуть груз (см. рис. 1П3, 1П5) для увеличения плеча рычага.
После определения оптимального хода РО клапана, требуемого для поддержания заданного параметра при максимальной нагрузке, дальнейшее открытие РО требуется ограничить. Ограничение открытия обеспечивается установкой шайбы (см. рис. 1П1) или упора (см. рис. 1П4) и позволяет увеличить скорость отработки регулятором (в состав которого входит и клапан) внешних возмущений.
Клапан ИК-25 применяется как:
дополнительный ускоритель в схемах регулирования давления и автоматической защиты (рассечки) тепловых сетей для увеличения скорости перемещения РО клапанов с большим диаметром условного прохода (свыше 250 мм);
исполнительное устройство в гидравлических регуляторах давления, перепада давлений, расхода, уровня или температуры непрямого действия в комплекте с приборами РД-3М, ТМП и др.;
разделительное трехходовое исполнительное устройство.
При работе клапана ИК-25 в качестве исполнительного устройства регулируемая среда подводится к нижнему патрубку и отводится в боковой патрубок. Второй боковой патрубок заглушается пробкой 8 (см. рис. 1П4).
При работе клапана в качестве трехходового устройства, а также как ускорителя при монтаже задействуются все три патрубка в соответствии со схемой автоматизации.
Сопротивление  полностью
открытого клапана РК-1 подсчитывается по формуле
полностью
открытого клапана РК-1 подсчитывается по формуле

Ориентировочно диаметр условного прохода (мм) можно определить по следующим формулам:
для воды Dy =  ;
;
для пара Dy
= ![]() ;
;
для газа Dу
=  .
.
где G - максимальный расход воды или пара, т/ч;
DР - перепад давлений на РО (клапане), кгс/см2;
Gг - максимальный расход газа, м3/ч;
Р2 - абсолютное давление газа на выходе из РО, кгс/см2;
r - плотность пара или газа, кг/м3;
с - скорость пара (м/с) определяемая по формуле
![]()
где j - коэффициент скорости (j = 0,6 ÷ 0,7);
Н - адиабатический перепад (ккал/кг) при расширении пара от начальных значений давления и температуры перед клапаном до давления после него (перепад определяется по is - диаграмме).
Если давление пара за клапаном меньше критического, то в расчете следует принять критическую скорость.
Определенный расчетом по формуле диаметр клапана округляется в большую сторону до ближайшего стандартного значения.
Приложение 2
РЕГУЛИРУЮЩИЙ ПРИБОР РД-3А
1. Назначение
Гидравлический регулирующий прибор РД-3А предназначен для применения в качестве чувствительно-усилительного элемента гидравлических регуляторов непрямого действия.
2. Область применения
2.1. В комплекте с исполнительными устройствами - регулирующими клапанами, оснащенными МИМ, приборы составляют регуляторы давления, перепада давлений, расхода и уровня, которые могут быть применены для автоматизации объектов теплоснабжения и промышленных предприятий.
2.2 Прибор в комплекте с исполнительными устройствами - быстродействующими сбросными устройствами может выполнять указанные функции в устройствах технологической защиты объектов систем теплоснабжения при аварийном нарушении гидравлических режимов.
2.3. Прибор в настоящее время снят с производства и заменен на аналогичный по назначению и области применения регулятор давления РД-3М. Описание прибора РД-3М дано в приложении 3.
2.4. Прибор РД-3А выпускался в двух модификациях:
односильфонная сборка (рис. 2П1), предназначенная для регулирования давления в регуляторах «До себя» и «После себя», а также устройствах защиты;
трехсильфонная сборка (рис. 2П2), предназначенная для использования в регуляторах перепада давлений (расхода), а также давления и перепада давлений в бессливных схемах.
На рис. 2П3 и 2П4 приведены варианты сборки управляющего клапанка.
3. Устройство и принцип действия
3.1. Принцип работы прибора основан на преобразовании механического перемещения ЧЭ в соответствующее изменение командного воздействия - давления Рх. Это перемещение возникает при отклонении регулируемого параметра от заданного значения вследствие нарушения баланса между усилием настроечной пружины и усилием на донышке сильфона чувствительного элемента и пропорционально величине нарушения.
Приборы односильфонной и трехсильфонной сборки имеют одинаковый принцип работы. Отличие в работе приборов состоит в том, что на сильфон ЧЭ односильфонной сборки давление подводится с одной стороны, а на сильфон чувствительного элемента трехсильфонной сборки давление подводится с двух сторон, вследствие чего прибором воспринимается перепад этих давлений.
3.2. Основными узлами обоих приборов (см. рис. 2П1, 2П2) являются: чувствительный элемент (ЧЭ); усилительный элемент (УЭ); настроечный элемент (НЭ) и основание.
Основание, которое служит для крепления на нем узлов и деталей прибора, снабжено щитком, в котором имеются два отверстия для крепления прибора на месте монтажа. Кроме того, на щитке размещена дренажная воронка. В нижней части основания, внутри отстойника, находится УЭ - управляющий клапанок.
3.3. Управляющий клапанок работает по принципу «сопло - заслонка» и состоит из корпуса, дросселя постоянного сечения, фильтра, нижнего и верхнего сопл, клапанка, направляющей втулки с отверстиями для слива, пружинки и головки.
В зависимости от принятой схемы регулирования управляющий клапанок может собираться по одному из трех вариантов: А, Б и В.
Вариант А применяется в схемах регулирования давления «После себя» и перепада давлений.
Вариант Б применяется в схемах регулирования давления «До себя».
Для прибора РД-3А разработан клапанок типа А4 (рис. 33) с большим расходом регулирующей среды.
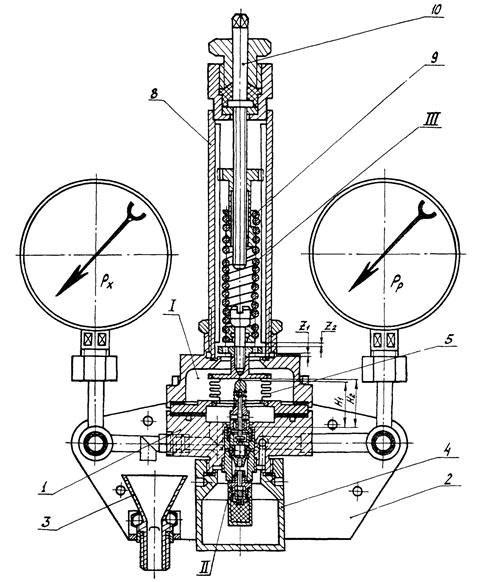
Рис. 2П1. Прибор РД-3А односильфонной сборки
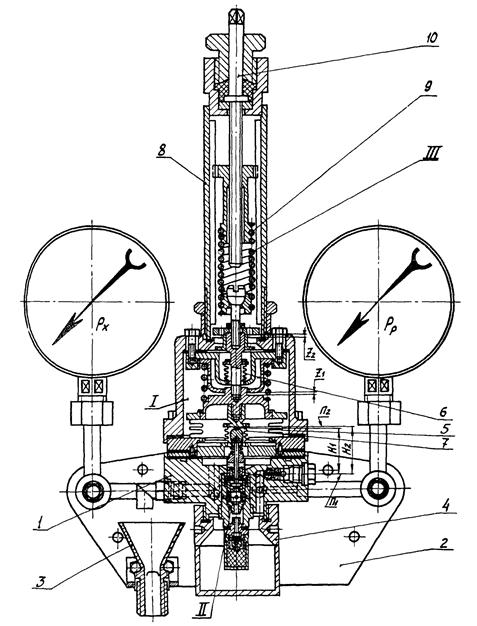
Рис. 2П2. Прибор РД-31 трехсильфонной сборки
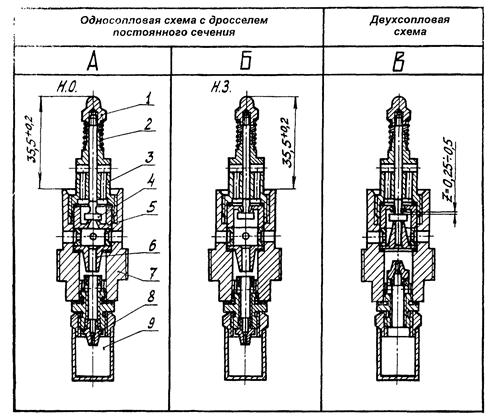
Рис. 2П3. Варианты сборки управляющего клапанка
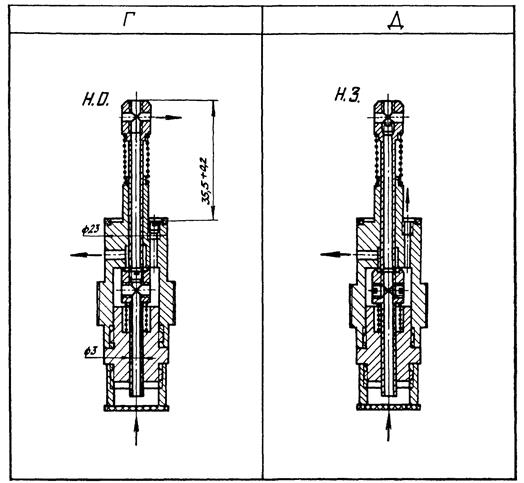
Рис. 2П4. Варианты сборки управляющего клапанка АЧ
Вариант В рекомендуется применять при работе прибора с регулирующими клапанами РК-1, оснащенными МИМ, при необходимости увеличения скорости перемещения РО (дроссель клапанка в работе не участвует).
3.4. Перед установкой клапанка в прибор после подключения импульсного давления Pи во избежание повреждения деталей клапанка с помощью настроечного винта должно быть выставлено расстояние Н2 = 36 мм между торцом расточки корпуса под клапанок и донышком сильфона.
3.5. Зазоры Z1 и Z2 между деталями обеспечивают перемещение подвижных элементов прибора и в то же время обеспечивают ограничение хода и защиту сильфонов от недопустимых значений ходов.
3.6. Чувствительный элемент трехсильфонной сборки состоит из измерительного и двух разделительных сильфонов.
Чувствительный элемент односильфонной сборки имеет только один измерительный сильфон.
3.7. Настроечный элемент состоит из стакана, внутри которого находится настроечная пружина, нижний конец которой соединен с ЧЭ, а верхний с настроечным винтом.
3.8. Расположение штуцеров показано на рис. 2П5, 2П6, где обозначено:
1 - подвод рабочей (управляющей) среды рр;
2 - отвод командного давления Рх;
3 - слив рабочей (управляющей) среды ро;
4 - подвод давления к ЧЭ (плюсовой) Ри;
5 - подвод давления к ЧЭ (минусовой) Ри;
6, 7 - подвод давления к камерам обратной связи Рос.
3.9. Давление регулируемого параметра может подводиться к прибору по трем вариантам:
при одноимпульсном регулировании через штуцер 4;
при двухимпульсном регулировании
(по перепаду давлений) большее давление (плюсовое) ![]() через штуцер 4, меньшее
давление (минусовое)
через штуцер 4, меньшее
давление (минусовое) ![]() через штуцер 5.
через штуцер 5.
3.10. Прибор трехсильфонной сборки может быть включен как по сливной, так и по бессливной схеме с возвратом рабочей среды в точку с пониженным давлением. Для бессливного включения необходимо иметь следующие условия:
разность давлений между источником рабочей среды рр и точкой возврата ро должна быть не менее 0,2 МПа;
исполнительный механизм должен быть двустороннего действия, например приводы клапанов УРРД и УРРД-М.
3.11. Ниже приводится перечень возможных неисправностей и методов их устранения.
|
Признак неисправности |
Причина неисправности |
Способ устранения |
|
1. При подаче импульсного давления наблюдается протечка в сливную воронку |
Разрыв сильфонов |
Разобрать прибор. Заменить сильфонный узел |
|
2. Отклонение регулируемого параметра не вызывает изменения командного давления Рх |
Разрыв измерительного сильфона. Поломка настроечной пружины |
Разобрать прибор. Заменить сильфонный узел или пружину |
|
3. Отсутствие слива в дренаж и командного давления при наличии рабочего |
Засорение дросселя или фильтра управляющего клапанка |
Извлечь управляющий клапанок, прочистить дроссель; промыть фильтр |
|
4. Отклонение регулируемого параметра не вызывает изменения командного давления |
Засорение импульсной линии или канала Ри. Заедание деталей клапанка. Попадание в клапанок посторонних предметов |
Продуть трубопроводы. Прочистить каналы прибора. Извлечь клапанок, очистить детали |
|
5. Отсутствуют командное давление Рх и слив в дренаж. При снятом отстойнике нет протока воды |
Засорение линии или канала рабочей среды |
Продуть трубопроводы, прочистить каналы прибора |
|
6. Разница в показаниях манометров командного давления на приборе и клапане |
Засорение линии командного давления |
Промыть линию потоком рабочей среды |
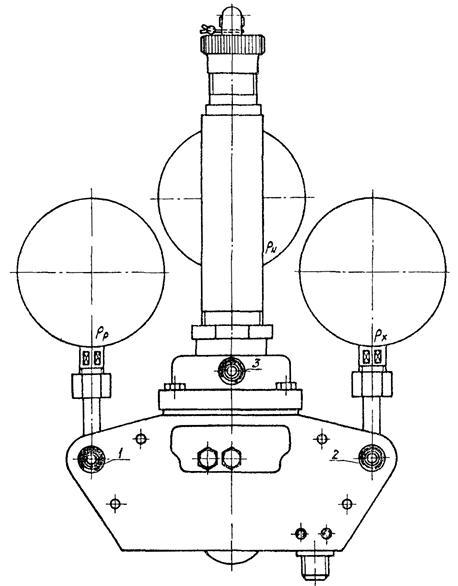
Рис. 2П5. Расположение штуцеров прибора односильфонной сборки:
1 - подвод рабочего агента Рр; 2 - отвод командного давления Рх; 3 - импульсной камеры
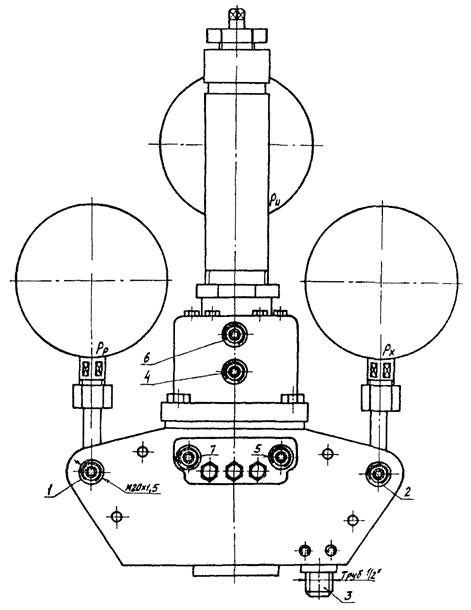
Рис. 2П6. Расположение штуцеров прибора трехсильфонной сборки:
1 - подвода рабочей среды Рр;
2 - отвода командного давления Рх; 3 - слива рабочей среды Ро;
4 - импульсной (плюсовой) камеры ![]() ; 5 - импульсной (минусовой камеры)
; 5 - импульсной (минусовой камеры) ![]() ; 6, 7
- камер обратной связи
; 6, 7
- камер обратной связи
Приложение 3
РЕГУЛЯТОР ДАВЛЕНИЯ РД-3М
1. Назначение
Регулятор давления РД-3М предназначен для применения в качестве чувствительно-усилительного элемента в гидравлических регуляторах непрямого действия.
2. Область применения
2.1. В комплекте с исполнительными устройствами - регулирующими клапанами, оснащенными МИМ, РД-3М составляют регуляторы давления, перепада давлений, расхода и уровня, применяемые для автоматизации объектов теплоснабжения и промышленных предприятий.
2.2. Регулятор РД-3М в комплекте с исполнительным устройством может использоваться в системах технологической защиты объектов систем теплоснабжения при аварийном нарушении гидравлических режимов.
Технические характеристики регуляторов приведены в приложении 10.
3. Устройство и принцип действия
3.1. Регулятор (рис. 3П1) состоит из следующих основных узлов: импульсной камеры; управляющего клапанка и настроечного элемента.
В импульсную камеру входит камера, внутри которой размещаются три сильфона (чувствительный, разделительный и обратной связи), жестко связанные между собой.
К импульсной камере крепятся управляющий клапанок и узел настройки. Узел настройки состоит из стакана, настроечного винта и пружины, соединенной тягой с донышком чувствительного сильфона.
Регулируемая и регулирующая среды подводятся к регулятору с помощью импульсных трубок, которые соединяются со штуцерами прибора. Штуцеры имеют следующие назначения:
1 - подвод рабочей (управляющей) среды рр - 2;
2 - отвод командного давления Рх - 1;
3 - слив рабочей среды ро;
4 - подвод давления к импульсной
(плюсовой), камере ![]() ;
;
5 - подвод давления к импульсной
(минусовой) камере ![]() ;
;
6 - подвод давления к штуцеру обратной связи Робр.
Штуцеры прибора имеют резьбу M16 × 1,5.
3.2. Регулируемый параметр может
подводиться по двум вариантам: при одноимпульсном регулировании (по давлению)
через штуцер 4; при двухимпульсном регулировании (по перепаду давлений) большее
(плюсовое) давление ![]() через штуцер 4, а меньшее (минусовое)
через штуцер 4, а меньшее (минусовое) ![]() через штуцер
5.
через штуцер
5.
3.3. В нижней части основания корпуса установлен управляющий клапанок рис. 3П2, который состоит из корпуса, дросселя постоянного сечения, фильтра, нижнего и верхнего сопл, клапанка, направляющей втулки с отверстиями для слива, пружинки и головки.
В зависимости от принятой схемы регулирования управляющий клапанок может собираться по одному из трех вариантов:
вариант А применяется в схемах регулирования давления «После себя» и перепада давлений;
вариант Б применяется в схемах регулирования давления «До себя»;
вариант В рекомендуется применять при работе прибора с регулирующими клапанами РК-1, оснащенными МИМ, при необходимости увеличения скорости перемещения РО (дроссель в работе не участвует)
С завода-изготовителя приборы поставляются с клапанком типа А.
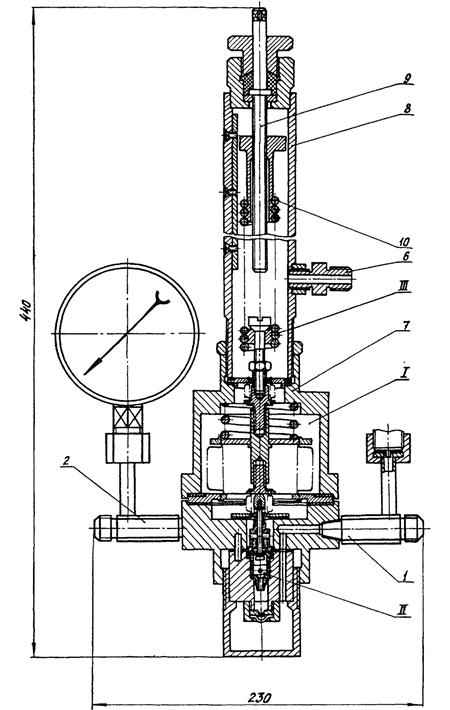
Рис. 3П1. Регулятор давления РД-3М
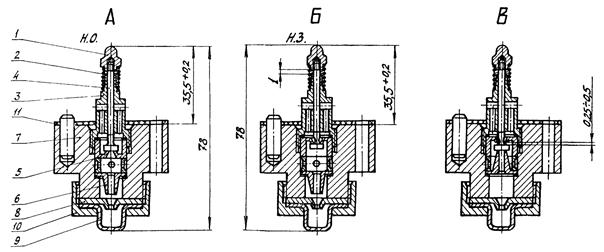
Рис. 3П2. Варианты сборки управляющего клапанка РД-3М
3.4. Принцип работы прибора основан на преобразовании механического перемещения ЧЭ в соответствующее изменение управляющего давления рабочей среды Рх. Эти перемещения возникают вследствие нарушения баланса усилия настроечной пружины и усилия на донышке сильфона ЧЭ при отклонении регулируемого параметра от заданного значения и пропорциональны значению отклонения.
3.5. Регулируемый параметр может подводиться к прибору по двум вариантам:
при одноимпульсном регулировании через штуцер 4;
при двухимпульсном регулировании
(по перепаду давлений) большее давление (плюсовое) ![]() через штуцер 4, меньшее
давление (минусовое)
через штуцер 4, меньшее
давление (минусовое) ![]() через штуцер 5.
через штуцер 5.
3.6. На стакане настроечного узла имеется штуцер для подключения (в случае необходимости) в процессе регулирования жесткой обратной связи. Для этого необходимо соединить между собой соединительной трубкой штуцеры 4 и 6. Степень обратной связи устанавливается при наладке.
3.7. Прибор может быть включен как по сливной, так и по бессливной схеме с возвратом рабочей среды в точку с пониженным давлением. Для бессливного включения необходимо иметь следующие условия:
разность давлений между источником рабочей среды рр и точкой возврата ро должна быть не менее 0,2 МПа;
исполнительный механизм должен быть двустороннего действия, например, приводы клапанов УРРД и УРРД-М.
4. Подготовка прибора к работе
Установка прибора и монтаж импульсных линий производится в соответствии с принятой монтажной схемой регулятора.
Прибор устанавливается в вертикальном положении, настроечной пружиной вверх, на кронштейне, прикрепленном к стенам или ограждениям площадок.
Соединение прибора с импульсными линиями осуществляется с помощью медных трубок длиной 500 мм, поставляемых с прибором.
5. Техническое обслуживание
5.1. Обслуживание прибора в процессе эксплуатации сводится к периодическим осмотрам прибора не реже одного раза в неделю. При этом проверяются стабильность и качество поддержания заданного значения регулируемого параметра с использованием для этой цели самопишущих и показывающих приборов.
5.2. Профилактические работы следует производить один раз в два-три месяца или чаще, что определяется в процессе эксплуатации. При этом необходимо:
очистить подводящие линии от загрязнений, шлама и солевых отложений методом продувки;
очистить внутренние каналы корпуса прибора от загрязнений и ржавчины;
очистить детали и фильтр управляющего клапанка от загрязнений;
проверить работоспособность прибора методом незначительного изменения настройки прибора с помощью настроечного узла. При этом должно наблюдаться некоторое перемещение РО исполнительного механизма.
5.3. Разборку и сборку прибора следует производить в соответствии с паспортом на регулятор давления РД-3М АЛШ 2.573.015 ПС, входящим в комплект поставки.
5.4. Ниже приводится перечень возможных неисправностей и методов их устранения.
|
Признак неисправности |
Причина неисправности |
Способ устранения |
|
1. При подаче импульсного давления наблюдается протечка из штуцера слива |
Разрыв сильфонов |
Разобрать прибор. Заменить сильфонный узел |
|
2. Отклонение регулируемого параметра не вызывает изменения командного давления Рх |
Разрыв измерительного сильфона. Поломка настроечной пружины. Засорение внутренних каналов |
Разобрать прибор. Заменить сильфонный узел или пружину. Прочистить каналы |
|
3. Отсутствие слива в дренаж и командного давления при наличии рабочего |
Засорение дросселя или фильтра управляющего клапанка |
Извлечь управляющий клапанок, прочистить дроссель; промыть фильтр |
|
4. Отклонение регулируемого параметра не вызывает изменения командного давления |
Засорение импульсной линии или канала Ри. Заедание деталей клапанка. Попадание в клапанок посторонних предметов |
Продуть трубопроводы. Прочистить каналы прибора. Извлечь клапанок, очистить детали |
|
5. Отсутствует командное давление Рх и слив в дренаж. При снятом отстойнике нет протока воды |
Засорение линии или канала рабочей среды |
Продуть трубопроводы, прочистить каналы прибора |
|
6. Разница в показаниях манометров командного давления на приборе и клапане |
Засорение линии командного давления |
Промыть линию потоком рабочей среды |
5.5. Пример записи при заказе и в технической документации регулятора давления с пределом настройки 1,6 МПа для исполнения УХЛ4: регулятор РД-3М-1,6 ТУ 25-0216.020-85; для исполнения 04 - регулятор РД-3М-1,6 04 ТУ 25.0216.020-85.
5.6. Наладку гидравлических систем автоматики на насосных станциях тепловых сетей и источниках тепловой энергии, построенных с применением РД-3М, РК-1 и других исполнительных устройств, описание которых дано в данных Методических указаниях, осуществляет цех теплофикации АО «Фирма ОРГРЭС».
Справки по телефону: 360-69-17 и 360-25-53.
Приложение 4
ТЕРМОРЕГУЛИРУЮЩИЙ ПРИБОР ПТ-1
1. Назначение и конструкция
Преобразователь температуры ПТ-1 - терморегулирующий малоинерционный прибор является чувствительно-усилительным элементом гидравлических регуляторов температуры непрямого действия. Выпускается взамен снятого с производства преобразователя ТМП.
Прибор ПТ-1 применяется для автоматизации закрытых систем горячего водоснабжения совместно с клапанами РК-1М, ИК-25, регулятором УРРД-М и другими подобными исполнительными устройствами, для автоматизации открытых систем горячего водоснабжения и смесительных установок, в качестве неотъемлемого узла регулятора температуры РТ-ГВ, для автоматизации различных технологических процессов.
Технические данные прибора ПТ-1 приведены в приложении 10. Прибор (рис. 4П1) работает следующим образом:
рабочий агент рр через один из штуцеров в зависимости от сборки затвора клапана подводится к преобразователю. Штырь одним концом соединен с толкателем сильфона, другим концом перекрывает центральное отверстие сопла, которое под действием пружины прижимается к седлу корпуса. При этом степень нагретости термобаллона соответствует заданному значению температуры, проток рабочего агента рр отсутствует, а командное давление Рх имеет какое-то промежуточное значение в пределах ро < Рх < рр.
При увеличении регулируемой температуры термобаллон, нагреваясь, перемещает штырь и сопло вверх, открывая проход рабочей среды рр к штуцеру, что приводит к изменению командного давления Рх.
Примечание. В зависимости от транспортного запаздывания греющей среды от РО до теплообменного аппарата, тепловой инерционности самого теплообменного аппарата и расхода нагреваемой среды регулирующий прибор ПТ-1 может работать в пропорциональном режиме регулирования или в двухпозиционном.
Аналог ПТ-1 под наименованием ПРТ-1 (рис. 4П2) выпускает АО «Теплоконтроль» (г. Сафонове).
2. Особенности наладки
Настройка на заданную температуру производится вращением колпачка. По стрелке к знаку «+» прибор настраивается на большую температуру, к знаку «-» на меньшую. Это происходит за счет выворачивания штыря из термобаллона и уменьшения зазора между фторопластовой прокладкой штыря и соплом.
При изменении регулируемой температуры сверх зоны пропорциональности необходимо проверить герметичность заполнения термобаллона.
Если (после предварительной разработки) при нажатии на штырь он утопает полностью или частично в термобаллоне, необходимо заново заполнить термобаллон термочувствительной жидкостью, например керосином или спиртом (заводской наполнитель - толуол) с помощью шприца, полностью удалив воздух, создавая постоянную вибрацию.
Прибор, монтируется на трубопроводе посредством бобышки, привариваемой к трубопроводу. Бобышка поставляется вместе с прибором.
Ниже даны варианты подсоединений линий (трубных проводок) к штуцерам в зависимости от схемы сборки ИУ (клапана), комплектующего с прибором.
|
Сборка затвора клапана |
Номер штуцера |
Вариант подсоединения |
||
|
1 |
2 |
3 |
||
|
Нормально-открыто (н. о.) |
рр |
Рх |
ро |
Прямой |
|
Нормально-закрыто (н. з.) |
ро |
Рх |
рр |
Обратный |
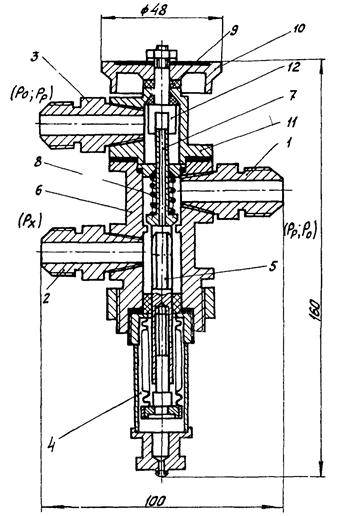
Рис. 4П1. Преобразователь температуры IIT-1
Рис. 4П2. Преобразователь температуры ПРТ-1
Приложение 5
РЕГУЛЯТОР УРРД-М
Универсальный регулятор расхода и давления модернизированный УРРД-М прямого действия предназначен для поддержания давления «До себя» и «После себя», перепада давлений или расхода.
Регулятор УРРД-М применяется как регулятор прямого действия при автоматизации абонентских вводов жилых, общественных и промышленных зданий. В комплекте с приборами РД-3А и др. применяется как исполнительное устройство гидравлических регуляторов давления, перепада давлений и расхода.
Технические данные регулятора приведены в приложении 10.
Регулятор устроен следующим образом (см. рисунок): в корпусе размещен РО, состоящий из подвижного и неподвижного седел и кольцевого разгруженного затвора. Сверху корпуса находится МИМ, состоящий из мембраны с жестким центром, зажатой между чашами, и стакана с настроечной пружиной. Один конец пружины соединен с настроечным винтом, а другой - с жестким центром мембраны. Затвор и жесткий центр соединены между собой штоком. В зависимости от схемы регулирования РО - кольцевой затвор может быть перенастроен по схеме н. о. или н. з.
Для этого необходимо отвернуть пробку и гайку и, вращая винт, переместить затвор в необходимое положение.
Принцип действия регулятора заключается в изменении расхода проходящей через него среды в зависимости от изменения значения регулируемого параметра.
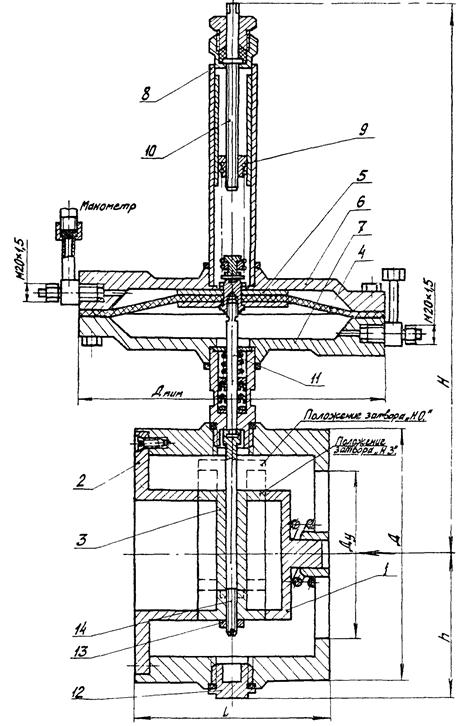
Рис. 5П. Регулятор давления, расхода прямого действия УРРД-М, Dу 80 мм
Приложение 6
РЕГУЛЯТОРЫ РАСХОДА И ДАВЛЕНИЯ ПРЯМОГО ДЕЙСТВИЯ РР (РД)
Регуляторы расхода и давления прямого действия РР (РД) - односедельные разгруженные применяют в качестве регуляторов перепада давлений (расхода) и давления «До себя» (подпора), а также в качестве регулирующих клапанов в схемах регулирования температуры воды на горячее водоснабжение (вместе с датчиком ТРБ-2) и в установках приточной вентиляции (вместе с датчиком ТРБ-В) для регулирования температуры воздуха.
Регулятор (рис. 6П1) состоит из корпуса с крышками, односедельного конусообразного клапана, соединенного при помощи штока с крышкой сильфона, и пружины, усилие которой создается натяжным приспособлением.
Регулятор разгруженный, давление Р2 до клапана действует в двух противоположных направлениях: на золотник клапана и на разгрузочный сильфон. Регулируемые параметры - давление Р2 в регуляторе РД или разность давлений Р2 - Рх в регуляторе РР - уравновешиваются пружиной настройки. При работе регулятора в качестве регулирующего клапана его перемещение зависит от командного давления Рх. При снижении давления Рх до нуля регулятор полностью закрывается, при увеличении Рх до Р1 регулятор полностью открывается. Степень закрытия и открытия клапана ограничена неподвижной 8 и подвижной 7 втулками. Регуляторы рассчитаны на условное давление порядка 1,6 МПа (16 кгс/см2) при температуре регулируемой среды до 150 °С.
Регулятор давления перед пуском в эксплуатацию должен быть налажен и отрегулирован на заданное давление. Наладку производят после наполнения и пуска системы отопления.
Перед наполнением должен быть принудительно поднят клапан РД путем вращения натяжного винта против часовой стрелки до предела, а также открыт регулятор расхода РР.
Схема отопительного ввода с регуляторами РР и РД показана на рис. 6П2.
Для наладки РД надо знать статическое давление отопительной системы, давление в обратном трубопроводе при работе тепловой сети и возможные колебания этого давления.
Наладку регулятора РД производят после включения циркуляции воды (необходимый расход воды устанавливают с помощью задвижек). Наладка сводится к регулировке натяжения пружины с таким расчетом, чтобы давление до регулятора при нормальном расходе воды установить равным заданному.
Для увеличения регулируемого давления необходимо увеличить натяжение пружины вращением натяжного винта по часовой стрелке, а для снижения регулируемого давления необходимо уменьшить натяжение пружины вращением натяжного винта против часовой стрелки.
В процессе эксплуатации регулятора РД необходимо периодически производить:
- проверку поддержания регулятором постоянного давления «До себя»;
- проверку плотности закрытия при выключении циркуляции воды в системе;
- проверку герметичности сильфона (нарушение герметичности обнаруживается по воде, вытекающей из сильфонной камеры). При появлении течи регулятор следует немедленно снять и отправить в ремонт.
До начала наладки регулятора расхода РР следует определить расчетную разность давлений перед элеватором, понимая под ней устойчивый перепад давлений, который может быть обеспечен в течение длительного периода эксплуатации.
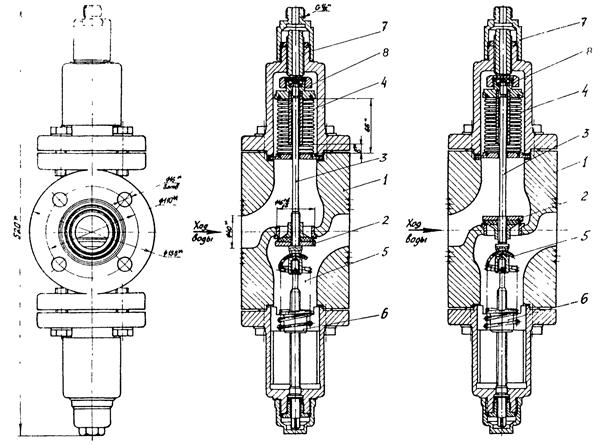
Рис. 6П1. Регулятор прямого действия РР и РД
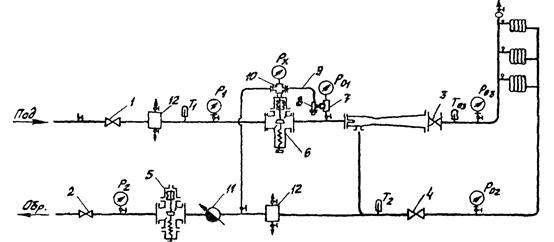
Рис. 6П2. Схема отопительного ввода с регуляторами РР и РД
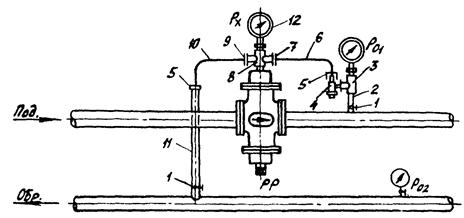
Рис. 6П3. Схема включения регулятора расхода РР
На основании значения этой разности выбирают схему присоединения импульсных трубок регулятора расхода, исходя из следующего:
- при расчетной разности давлений перед элеватором менее 2 кгс/см2 сильфонная камера регулятора РР присоединяется только к обратной трубе. В этом случае на импульсной трубке, соединяющей сильфонную камеру с подающей линией, ставится заглушка, а шайбы и фильтр не устанавливаются;
- при расчетной разности давлений перед элеватором более 2 кгс/см2 сильфонная камера регулятора РР соединяется с подающим и обратным трубопроводами в соотнесший с рис. 6П3.
Наладку регулятора расхода производят при полностью открытой задвижке на подающей трубе и при открытом вентиле на импульсной трубке.
Наладка регулятора расхода сводится к установлению заданного расхода воды путем постепенного натяжения пружины. Для уменьшения расхода воды маховик натяжного приспособления вращают против часовой стрелки, а для увеличения - по часовой.
До включения импульсного давления следует произвести продувку импульсных линий и фильтра-отстойника до полного осветления воды.
Наладка регулятора расхода сводится к установлению заданного расхода воды путем постепенного натяжения пружины. Для уменьшения расхода воды маховик натяжного приспособления вращают против часовой стрелки, а для увеличения - по часовой.
После настройки регулятора РР производят проверку качества его работы.
Для этого при полностью открытой задвижке на подающей трубе записывают давление перед регулятором Р1, после регулятора Ро1 и давление в обратной линии Ро2.
Затем прикрывают задвижку на подающей трубе до тех пор, пока разница давлений (Р1 - Ро2) не снизится до значения, которое было при полностью открытой задвижке.
При этом расход воды через регулятор РР должен снизиться не более, чем на 10 %.
Основные технические характеристики регуляторов приведены в приложении 10.
Приложение 7
РЕГУЛЯТОРЫ ПРЯМОГО ДЕЙСТВИЯ 21ч 13нж, 21ч 14нж, 21ч 10нж, 21ч 12нж
Регулятор давления прямого действия (21ч 13нж, 21ч 14нж) предназначен для поддержания заданного давления в трубопроводах для жидких и газообразных неагрессивных сред с температурой рабочей среды от минус 15 до 200 °С условным давлением 1,6 МПа (16 кгс/см2); верхний предел настройки давления 1 МПа (10 кгс/см2).
Регулятор (рис. 7П1) состоит из двух основных узлов: регулятора-задатчика и исполнительного устройства.
Регулятор-задатчик состоит из: регулировочного винта, пружины, мембраны, клапана, пружины и крышки.
Исполнительное устройство состоит из стойки, пружины, поршня, клапана 1 и корпуса 1.
Зона А регулятора давления «После себя» сообщается импульсной трубкой с входной полостью корпуса:
Принцип работы регулятора давления «После себя» заключается в следующем. При работе на установившемся расходе подвижные части регулятора-задатчика и исполнительного устройства находятся в равновесии.
В зоне А поддерживается постоянное усилие на поршне, что и задает уровень давления в объекте регулирования.
При изменении расхода в объекте регулирования, например, уменьшении, давление в объекте регулирования повышается. Равновесие поршня нарушается, поршень с клапанами перемещается вверх.
Проход между клапанами и седлами корпуса уменьшается, уменьшается поступление рабочей среды в объект регулирования и при наступлении равенства расходов через объект регулирования и регулятор давления давление в объекте регулирования восстанавливается на заданном уровне.
Перемещение поршня изменяет усилие пружины, что в свою очередь перенастраивает регулятор-задатчик и компенсирует возможное отклонение заданного выходного давления, являющегося следствием изменения усилия пружины.
Регулятор выпускается также в исполнении «До себя».
Рычажный регулятор давления прямого действия (21ч 10нж, 21ч 12нж) предназначен для поддержания заданного давления в трубопроводах для жидких и газообразных неагрессивных сред с температурой рабочей среды от минус 15 до 300 °С и условным давлением 1,6 МПа (1,6 кгс/см2).
Регуляторы давления «До себя» и «После себя» (рис. 7П2) отличаются в основном конструкцией органа регулирования - двухседельного клапана и его положением. Подвижная часть рычажной системы имеет призменные опоры.
Регулятор работает следующим образом. При установившемся режиме за регулятором (или до него) поддерживается заданное давление и подвижная система находится в равновесии. С изменением регулируемого давления меняется сила, действующая на ЧЭ - мембрану, и под действием разности между этой силой, создаваемой массой груза, подвижная система регулятора перемещается в новое положение до тех пор, пока не восстановится равновесие.
Регулятор снабжен мембранной головкой и комплектом грузов на требуемый предел регулирования.
Технические данные регуляторов приведены в приложении 10.
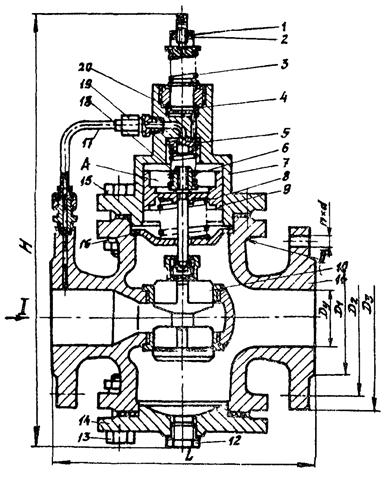
|
Обозначение |
Dу |
L |
Н |
D1 |
D2 |
D3 |
d |
n |
|
УФ63014-050 |
50 |
230 ± 3 |
400 |
102 |
125 |
160 |
18 |
4 |
|
УФ63014-080 |
80 |
310 ± 5 |
450 |
133 |
180 |
195 |
18 |
4 |
|
УФ63014-100 |
100 |
350 ± 5 |
495 |
158 |
180 |
215 |
18 |
8 |
|
УФ63014-150 |
150 |
480 ± 5 |
575 |
212 |
240 |
280 |
22 |
8 |
Рис. 7П1. Регулятор давления «После себя»

|
Размеры, мм |
Количество отверстий |
|||||||
|
Условный проход Dу |
Строительная длина |
Высота от оси H1 |
Общая высота Н |
Присоединительные фланцы |
||||
|
D |
D1 |
D2 |
d |
|||||
|
50 |
230 |
563 |
688 |
160 |
125 |
102 |
18 |
4 |
|
80 |
310 |
661 |
750 |
195 |
160 |
133 |
18 |
4 |
|
100 |
350 |
611 |
780 |
215 |
180 |
158 |
18 |
8 |
|
150 |
480 |
660 |
880 |
280 |
240 |
212 |
22 |
8 |
Рис. 7П2. Регулятор давления рычажный «После себя»
Приложение 8
РЕГУЛЯТОРЫ ТЕМПЕРАТУРЫ ПРЯМОГО ДЕЙСТВИЯ РТ-ДО (ДЗ)
Регуляторы температуры прямого действия РТ-ДО (ДЗ) предназначены для автоматического поддержания температуры регулируемой среды путем изменения расхода пара жидких или газообразных сред. Применяются в закрытых системах теплоснабжения для регулирования температуры воды на горячее водоснабжение.
Регулятор (рис. 8П1, 8П2) состоит из термосистемы и РО. Термосистема, внутренняя полость которой герметична, состоит из термобаллона, исполнительного органа и шкалы настройки. Регулирующий орган состоит из корпуса, закрепленного в корпусе седла, штока с клапаном и сильфона разгрузки.
Принцип действия регулятора основан на изменении объема жидкости в термобаллоне при изменении регулируемой температуры. Изменение объема жидкости вызывает перемещение штока исполнительного органа и связанного с ним штока с клапаном. Настройка регулятора на заданную температуру производится по шкале вращением винта настройки.
Для включения регулятора необходимо на шкале настройки установить значение регулируемой температуры и открыть вентиль перед регулятором. В дальнейшем регулятор будет автоматически поддерживать температуру. Настройка регулятора на заданную температуру производится по контрольному термометру. При настройке регулятора на температуру регулирования могут быть внесены поправки на отклонение температуры окружающей среды и температуры исполнительного органа от 20 °С. Температура, установленная по шкале настройки, будет соответствовать открытому положению клапана для регуляторов РТ-ДО и закрытому положению для регуляторов РТ-ДЗ. Основные технические характеристики приведены в приложении 10.
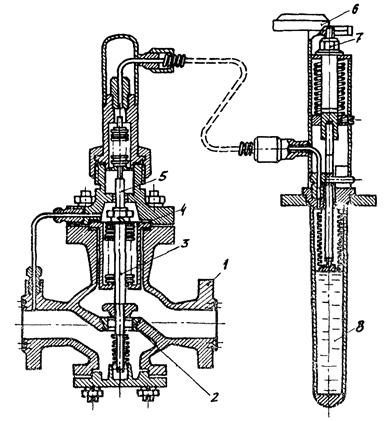
Рис. 8П1. Регулятор температуры прямого действия РТ-ДО (ДЗ)
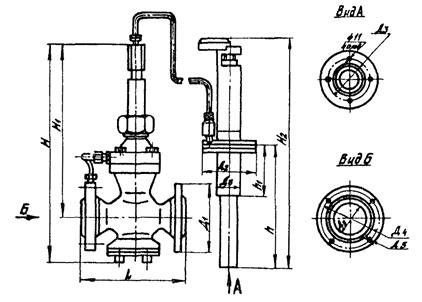
|
Диаметр условного прохода Dу, мм |
N, мм |
Н1, мм |
L, мм |
D1, мм |
D2, мм |
D3, мм |
D4, мм |
D5, мм |
D6, мм |
h1, мм |
h2, мм |
h, мм |
|
15 |
315 |
250 |
130 |
95 |
80 |
65 |
65 |
14 |
34 |
64 |
470 |
270 |
|
20 |
315 |
230 |
150 |
105 |
80 |
65 |
75 |
14 |
34 |
64 |
||
|
25 |
330 |
260 |
160 |
115 |
80 |
65 |
85 |
14 |
34 |
64 |
||
|
40 |
375 |
275 |
200 |
145 |
80 |
65 |
110 |
18 |
34 |
64 |
||
|
50 |
495 |
380 |
230 |
160 |
100 |
80 |
125 |
18 |
53 |
80 |
690 |
490 |
|
80 |
575 |
420 |
310 |
185 |
100 |
80 |
150 |
18 |
53 |
80 |
Рис. 8П2. Габаритные и присоединительные размеры регуляторов РТ
Приложение 9
РЕГУЛЯТОРЫ ТЕМПЕРАТУРЫ РТЦГВ
Регуляторы температуры РТЦГВ (см. рисунок) предназначены для автоматического регулирования температуры в системах централизованного горячего водоснабжения отдельных зданий и обслуживающих комплексов зданий различного назначения с количеством водопотребителей 1000 чел. и более при числе установленных водоразборных приборов 550 и более.
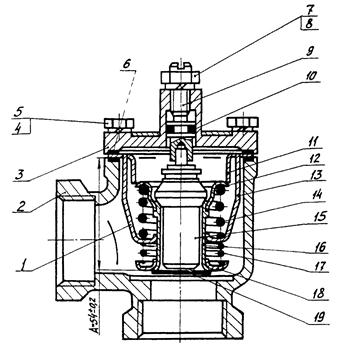
Рис. 9П. Регулятор РТЦГВ
Регулятор состоит из узла клапана 1, закрепленного между корпусом 2 и крышкой 3 болтами 4 и шайбами 5.
Для герметизации служат две прокладки 6. В узел клапана входят два клапана 12 и 18.
Поджатие рабочей пружины 14 обеспечивается за счет разворота и пайки скобы 13 к седлу 11. Поджатие пружины первого клапана 17 создается кернением заглушки 19 на гильзе 16. При этом должен быть выдержан размер А = (54 ± 0,2) мм.
С помощью винта 9, шайбы 8 и гайки 7 в узле клапана крепится датчик температуры ТД6М с твердым наполнителем 15. В винте вмонтировано уплотнительное кольцо 10. Стенка корпуса 2 является седлом для второго клапана 18.
Принцип действия основан на использовании эффекта изменения объема термочувствительного наполнителя датчика температуры при изменении температуры регулируемой среды (горячей воды в циркуляционном трубопроводе горячего водоснабжения).
Повышение температуры регулируемой среды вызывает увеличение объема термочувствительного наполнителя (воска), что вызывает увеличение длины штока датчика. Шток датчика, упираясь в неподвижный винт 9, вызывает перемещение узла клапана, что уменьшает проходное сечение регулятора.
При понижении температуры регулируемой среды объем термочувствительного наполнителя датчика уменьшается. Это вызывает перемещение под действием пружины 14 узла клапана к исходному положению. При этом увеличивается проходное сечение регулятора.
Регуляторы обеспечивают интенсивность циркуляции в отдельных стояках в зависимости от температуры среды в них, что способствует выравниванию температуры и стабилизации на заданном уровне.
Перед включением в работу необходимо убедиться в правильности монтажа и проверить на герметичность гидравлическим давлением, равным максимальному в системе, но не более 1 МПа (10 кгс/см2), места соединения с трубопроводом.
Регуляторы поставляются отрегулированными и настроенными на заданную температуру фиксированной настройки.
Дополнительная настройка запрещается.
Основные технические характеристики регуляторов приведены в приложении 10.
Приложение 10
ТЕХНИЧЕСКИЕ ДАННЫЕ РЕГУЛЯТОРОВ
1. Регулирующие приборы непрямого действия
|
Тип прибора |
Регулируемый параметр |
Условное давление регулируемой среды, МПа |
Температура, °С |
Расход рабочей среды, воды, м3/ч |
Пределы настройки |
Зона пропорциональности |
Зона нечувствительности |
Масса, кг |
|
|
регулируемой среды |
рабочей среды |
||||||||
|
РД-3А: |
|||||||||
|
Односильфонная сборка |
Вода, пар, воздух |
1,6 |
180 |
От 5 до 70 |
0,03 |
0,6 - 1,6 0,16 - 0,6 0,06 - 0,25 0,01 - 0,16 |
4 - 25 % верхнего предела настройки - для давления, 40 - 250 мм вод. ст. - для уровня |
0,6 - 2,5 % верхнего предела настройки - для давления, до 10 мм вод. ст. - для уровня |
11 |
|
Трехсильфонная сборка |
То же |
1,6 |
180 |
От 5 до 70 |
0,03 |
0,6 - 1,6 0,16 - 0,6 0,06 - 0,25 0,01 - 0,16 |
14 |
||
|
РД-3М |
То же |
2,5 |
180 |
От 5 до 70 |
0,03 |
0,01 - 0,1 0,06 - 0,25 0,1 - 0,6 0,4 - 1,6 1,6 - 2,5 |
До 25 % верхнего предела настройки - для давления, до 250 мм вод. ст. - для уровня |
До 2,5 % верхнего предела настройки - для давления, 10 мм вод. ст. - для уровня |
10,4 |
|
ПТ-1-1 |
Вода |
1,6 |
90 |
От 5 до 70 |
0,1 |
10 - 90 °С |
До 6 °С |
0,6 °С |
1,3 |
|
ПТ-1-2 |
- » - |
1,6 |
160 |
От 5 до 70 |
0,1 |
80 - 160 °С |
До 6 °С |
0,6 °С |
1,3 |
|
ПРТ-1 |
- » - |
1,6 |
От 10 до 160 |
От 5 до 70 |
0,1 |
10 - 90 °С 80 - 160 °С |
До 6 °С |
0,6 °С |
1,3 |
|
РТ-ГВ (регулятор температуры горячего водоснабжения в комплекте с ПТ-1-1 или ПТ-1-2) |
- » - |
1,6 |
От 10 до 160 |
От 5 до 70 |
0,1 |
10 - 90 °С 80 - 160 °С |
До 6 °С |
0,6 °С |
От 6,0 до 18,5 |
|
Примечание. Прибор ПРГ (аналог РД-3М) намечен к производству на Полтавском турбомеханическом заводе. Технические характеристики прибора те же, что у прибора РД-3А и РД-3М. Возможна установка на прибор ПРГ устройства для дистанционного задания регулируемого параметра. |
|||||||||
2. Регуляторы прямого действия
|
Тип регулятора |
Регулируемый параметр |
Диаметр условного прохода Dу, мм |
Условная пропускная способность Кv, м3/ч |
Условное давление регулируемой среды, МПа |
Температура регулируемой среды, °С |
Пределы настройки |
Зона пропорциональности |
Зона нечувствительности |
Масса, кг |
|
УРРД-2 |
Вода |
50 80 |
25 ± 2,5 60 ± 6,0 |
1,6 |
От 30 до 180 |
0,01 - 0,04 0,04 - 0,16 0,16 - 0,6 |
2,5 % верхнего предела настройки |
25 ± 1 10 ± 1 |
|
|
УРРД-М |
- » - |
25 50 80 |
6 25 60 |
1,6 |
От 30 до 180 |
0,01 - 0,04 0,04 - 0,16 0,16 - 0,6 |
20 - 40 % верхнего предела настройки |
2,5 % верхнего предела настройки |
От 16 до 21 |
|
РР-10 |
- » - |
40 |
4 |
1,0 |
150 |
- |
- |
- |
- |
|
РР-50 |
- » - |
50 |
4 - 8 |
1,0 |
150 |
- |
- |
- |
- |
|
РР-80 |
- » - |
80 |
8 - 25 |
1,0 |
150 |
- |
- |
- |
- |
|
РР-100 |
- » - |
100 |
25 - 40 |
1,0 |
150 |
- |
- |
- |
- |
|
РД-50 |
- » - |
50 |
До 12 |
1,0 |
150 |
- |
- |
- |
- |
|
РД-80 |
- » - |
80 |
До 40 |
1,0 |
150 |
- |
- |
- |
- |
|
РД-32 |
- » - |
32 |
10 |
1,6 |
160 |
0,025 - 0,1 0,063 - 0,25 |
20 % верхнего предела настройки |
2,5 % верхнего предела настройки |
35 |
|
21ч 13нж, 21ч 14нж |
Жидкие, газообразные неагрессивные среды |
50 80 100 150 |
25 63 100 250 |
1,6 |
От - 15 до + 200 |
0,08 - 1,0 |
16 % верхнего предела настройки |
- |
26 |
|
21ч 10нж, 21ч 12нж |
То же |
50 80 100 150 |
25 63 100 250 |
1,6 |
От - 15 до + 300 |
0,015 - 0,95 |
- |
- |
82 |
|
РТ-ДО (ДЗ) |
Вода |
15 20 25 40 50 80 |
2,5 4,0 6,5 16,0 25,0 60,0 |
1,6 |
От 0 до 180 |
От 0 - 40 °С до 140 - 180 °С |
10 °С |
1 °С |
- |
|
РТЦГВ |
- » - |
20 25 |
4 6 |
1,0 |
50, 60, 75 °С |
10 °С |
3 °С |
2,7 |
3. Перечень заводов-изготовителей
|
Средства автоматизации |
Наименование завода |
Адрес |
|
РР-40, РР-50, РР-80, РР-100, РД-50, РД-80 |
АОЗТ «САТЭКС» |
127018, г. Москва, ул. Полковая, д. 3/4 Телефон: 289-85-19, 289-73-74 |
|
РД-3М, УРРД-2, УРРД-М, ИК-25, РК-1М, РТ-ГВ, ПТ-1-1, ПТ-1-2 |
Акционерное общество открытого типа Улан-Удэнский завод «ТЕПЛОПРИБОР» |
670045, г. Улан-Удэ, ул. Трактовая, 1. Телетайп: 219133 «Заря» Телефон: (301-22) 2-28-62, 2-60-85, 2-68-72, 2-61-30, 2-67-18 |
|
РД-32, ПРТ-1, РТ-ДО (ДЗ), РТЦГВ |
Акционерное общество «Тепло-контроль» |
215700,
Смоленская об., г. Сафоново. Факс: 4-24-80 |
|
21ч 13нж, 21ч 14нж, 21ч 10нж, 21ч 12нж |
Бугульминский механический завод |
423200, Татарстан, г. Бугульма. Телефон: (8-843-14) 5-36-14, 5-36-67, 5-17-65 |
|
PK-l, Dy 150 - 700 мм, РК-1, Dy 1000 мм |
Полтавский турбомеханический завод |
314601, г Полтава, ул. Зеньковская, 6. Телефон 1-39-49 Факс: 7-24-66 |
СПИСОК ИСПОЛЬЗОВАННОЙ ЛИТЕРАТУРЫ
1. СНиП III-34-74. Правила производства и приемки работ. Системы автоматизации. М.: Стройиздат, 1976.
2. Инструкция по эксплуатации тепловых сетей. М.: Энергия, 1972.
3. Манюк В. И., Каплинский Я. И. Справочник по наладке и эксплуатации тепловых сетей. М.: Стройиздат, 1982.
4. Правила техники безопасности при эксплуатации тепломеханического оборудования электростанций и тепловых сетей. М.: Энергоатомиздат, 1985.
5. Заводские инструкции по эксплуатации гидравлических регуляторов.
6. Правила технической эксплуатации электрических станций и сетей. М.: СПО ОРГРЭС, 1996.
7. Расчет регулирующих клапанов. М.: Обзор. Информэнерго. 1973.
8. Справочник по арматуре тепловых электростанций. М.: Энергоиздат, 1981.
СОДЕРЖАНИЕ