ГОСТ 28776-90
МЕЖГОСУДАРСТВЕННЫЙ СТАНДАРТ
АВТОЗАХВАТЫ ДЛЯ КОНТЕЙНЕРОВ
СЕРИИ 3
КЛАССИФИКАЦИЯ,
ТЕХНИЧЕСКИЕ ТРЕБОВАНИЯ
И МЕТОДЫ ИСПЫТАНИЙ
|
|
Москва Стандартинформ 2005 |
МЕЖГОСУДАРСТВЕННЫЙ СТАНДАРТ
|
АВТОЗАХВАТЫ ДЛЯ КОНТЕЙНЕРОВ СЕРИИ 3 Классификация, технические требования и методы испытаний Automatic clamping devices for containers of 3 series. |
ГОСТ |
Дата введения 01.07.91
Настоящий стандарт распространяется на контейнерные автозахваты, которыми оснащаются подъемно-транспортные машины для перегрузки контейнеров серии 3 по ГОСТ 18477. Требования настоящего стандарта являются обязательными.
1. КЛАССИФИКАЦИЯ
1.1. В зависимости от степени универсальности автозахваты разделяют на:
1) для одного типа контейнера;
2) для всех типов контейнеров серии 3 (универсальный автозахват).
Примечание. Универсальный автозахват конструктивно может выполняться с раздвижной рамой, с убирающимися захватными органами и т. п.
1.2. По количеству одновременно застрапливаемых контейнеров автозахваты разделяют на:
1) для строповки одного контейнера;
2) для одновременной строповки нескольких контейнеров (групповой автозахват).
1.3. По типу привода автозахваты разделяют на:
1) с ручным приводом;
2) с силовым приводом (электрическим, гидравлическим и др.);
3) с циклическим действием механизма фиксации захватных органов в нерабочем или рабочем положении.
1.4. По способу наводки на контейнер автозахваты разделяют на:
1) с зонной наводкой - для наведения захватных органов в определенную достаточно большую зону на крыше контейнера;
2) с точечной наводкой - для установления захватных органов точно в рымные карманы контейнера;
3) с приспособлениями для наводки (упоры, козырьки, средства автоматической наводки);
4) без приспособлений для наводки.
1.5. По способу управления автозахваты разделяют на:
1) с дистанционным управлением (с пульта крановщика);
2) с программным управлением;
3) с автоматическим управлением.
2. ТЕХНИЧЕСКИЕ ТРЕБОВАНИЯ
2.1. Автозахват должен обеспечивать захват контейнеров серии 3, оборудованных подъемными устройствами в виде рымных узлов, расстояния между которыми соответствуют требованиям ГОСТ 18477.
2.2. Конструкция автозахвата должна обеспечивать:
1) доступ для осмотра, смазки и замены элементов;
2) возможность быстрой настройки его относительно рымных узлов контейнера;
3) надежное сцепление с рымными узлами контейнера;
4) отсоединение его от контейнера, стоящего на поверхности, без повреждения автозахвата или контейнера при выходе из строя механизма захвата или отклонения привода;
5) строповку плотно стоящих контейнеров с разностью по высоте их крыш до 300 мм;
6) строповку контейнеров, наклоненных под углом до 10° к горизонтали;
7) безотказную работу при высоте рыхлого снега до 300 мм, уплотненного слоя снега до 150 мм и наледи до 30 мм;
8) перегрузку загруженного до максимальной массы брутто контейнера при смещении его центра тяжести в продольном и поперечном направлениях на 1/10 от геометрического центра контейнера.
2.3. Конструкция автозахвата должна исключать самоотцепление контейнера в поднятом положении и при установке контейнера на любые опорные поверхности, а также возможность принудительной отстроповки крановщиком контейнера в поднятом положении.
2.4. Масса автозахвата с комплектующим оборудованием должна составлять не более 15 % номинальной грузоподъемности.
2.5. Грузоподъемность автозахвата должна соответствовать максимальной массе брутто контейнера, для которого автозахват предназначен, а универсального автозахвата - наибольшей максимальной массе брутто контейнера серии 3.
2.6. Габаритные размеры раздвижного автозахвата в поперечном и продольном направлениях не должны выходить за габаритные размеры контейнера типа 3А, а нераздвижного - за габариты соответствующего контейнера.
2.7. При наличии на автозахвате приспособлений для наводки конструкция приспособлений должна обеспечивать их установку в нерабочем положении в пределах габаритных размеров контейнеров.
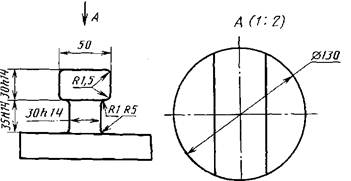
2.8. Автозахват должен иметь в центре рамы присоединительный узел для быстрого соединения с поворотным механизмом или с элементами подвески подъемно-транспортной машины.
Размеры присоединительного узла должны соответствовать приведенным на чертеже.
2.9. Оснащение автозахвата присоединительным узлом не должно исключать возможность его оборудования другими приспособлениями для соединения с грузоподъемным механизмом.
2.10. Выходной вал поворотного механизма или другой элемент подвески подъемно-транспортной машины должен иметь отверстие по форме присоединительного узла со свободной посадкой и фиксирующее приспособление (например свободно сидящее на валу кольцо).
2.11. Допускается оборудование автозахвата дополнительными устройствами для ручной строповки (например цепями с крюками).
2.12. Дистанционное управление силовым приводом автозахвата должно осуществляться с пульта управления, расположенного в кабине подъемно-транспортной машины.
Управление автозахватом с ручным приводом должно осуществляться дистанционно с поверхности контейнерных площадок, например, при помощи троса или цепи.
2.13. При оборудовании автозахвата силовым приводом должно быть обеспечено его механическое отключение после окончания операции захвата, а также исключение перегрузок элементов привода, например, путем установки муфты предельного момента.
2.14. Перенастройка раздвижных автозахватов с одного типа контейнера на другой должна осуществляться дистанционно с пульта управления автозахватом.
2.15. Автозахват должен быть оснащен сигнализацией, видимой с рабочего места в кабине подъемно-транспортной машины, подтверждающей надежный захват контейнера за все подъемные устройства.
2.16. У автозахватов с силовым приводом все подвижные части провода должны быть защищены кожухом.
2.17. Автозахват с силовым приводом должен быть оборудован блокировкой, исключающей подъем контейнера, застропленного не за все подъемные устройства.
2.18. Заварка и заделка дефектов захватных элементов не допускается.
2.19. Поверхности автозахвата должны быть защищены от коррозии.
2.20. Захватные органы и приспособления для наводки должны быть окрашены согласно требованиям ГОСТ 12.2.058.
3. КОМПЛЕКТНОСТЬ
Автозахват должен поставляться с технической документацией, содержащей инструкцию по обслуживанию и текущему ремонту, каталог запасных частей, журнал учета работы и технического состояния подъемного устройства и с документацией, устанавливающей предельные значения параметров безопасной эксплуатации автозахвата (механический износ, прогибы несущих элементов и др.).
4. ПРАВИЛА ПРИЕМКИ
Каждый автозахват должен подвергаться приемочному контролю, который должен включать:
1) испытания на прочность (статические и динамические);
2) осмотр с целью выявления внешних дефектов изготовления;
3) проверку работоспособности;
4) проверку соответствия размеров чертежу, утвержденному в установленном порядке;
5) контроль комплектности документации.
5. МЕТОДЫ ИСПЫТАНИЙ
5.1. До начала статических и динамических испытаний следует проводить проверку работоспособности механизмов автозахвата подключением к источнику питания и реверсивным включением привода механизмов автозахвата, как находящегося в подвешенном состоянии, так и стоящего на плоскости. Одновременно должна проверяться работа сигнализации и блокировки.
5.2. Проверку работоспособности устройства безопасности, блокировки и сигнализации следует проводить путем подключения сигнального приспособления к электрической схеме этих устройств.
5.3. Статические испытания автозахвата следует проводить с контейнером, действительная масса брутто которого на 25 % больше номинальной грузоподъемности автозахвата. Для этого контейнер, застропленный автозахватом, поднимают на высоту 100-200 мм и удерживают в этом положении не менее 10 мин. Испытание выполняют 3 раза.
5.4. Динамические испытания автозахвата следует проводить с контейнером, действительная масса брутто которого на 10 % больше номинальной грузоподъемности автозахвата.
Подъемно-транспортная машина с контейнером, застропленным автозахватом, выполняет перемещения в горизонтальной плоскости при максимальной скорости 50 м/мин, без набега на конечный выключатель. Испытание выполняют 3 раза.
При следующем испытании контейнер, застропленный автозахватом, поднимают грузоподъемным устройством на высоту 2 м и удерживают в этом положении 10 мин. Затем опускают контейнер с торможением на высоте 1 м с общим тормозным путем в пределах 0,1-0,3 м. Испытание выполняют 3 раза. Затем опускают контейнер при скорости 20 м/мин.
5.5. По окончании статических и динамических испытаний все детали и механизмы автозахвата должны быть исправными.
6. МАРКИРОВКА
На одной из поверхностей автозахвата в хорошо обозреваемом месте должна быть прикреплена коррозионно-стойкая табличка, содержащая следующие данные:
1) наименование или товарный знак предприятия-изготовителя;
2) порядковый номер автозахвата по системе нумерации предприятия-изготовителя;
3) номинальную грузоподъемность, т;
4) собственную массу, т;
5) месяц и год выпуска;
6) обозначение настоящего стандарта.
Место, способ нанесения и размеры знаков маркировки должны обеспечивать сохранность ее в течение всего срока службы автозахвата.
ИНФОРМАЦИОННЫЕ ДАННЫЕ
1. РАЗРАБОТАН И ВНЕСЕН Министерством путей сообщения СССР
2. УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Постановлением Государственного комитета СССР по управлению качеством продукции и стандартам от 06.12.90 № 3072
3. Стандарт полностью соответствует СТ СЭВ 6869-89
4. ВВВДЕН ВПЕРВЫЕ
5. ССЫЛОЧНЫЕ НОРМАТИВНО-ТЕХНИЧЕСКИЕ ДОКУМЕНТЫ
|
Обозначение НТД, на который дана ссылка |
Номер пункта |
|
2.20 |
|
|
Вводная часть; 2.1 |
6. ПЕРЕИЗДАНИЕ. Апрель 2005 г.