ГОСТ 26.201.1-94
(МЭК 552-77)
МЕЖГОСУДАРСТВЕННЫЙ СТАНДАРТ
СИСТЕМА КАМАК
ОРГАНИЗАЦИЯ МНОГОКРЕЙТОВЫХ СИСТЕМ
ТРЕБОВАНИЯ К МАГИСТРАЛИ ВЕТВИ И
КРЕЙТ-КОНТРОЛЛЕРУ КАМАК ТИПА А1
МЕЖГОСУДАРСТВЕННЫЙ СОВЕТ
ПО СТАНДАРТИЗАЦИИ, МЕТРОЛОГИИ И СЕРТИФИКАЦИИ
Минск
ПРЕДИСЛОВИЕ
1 РАЗРАБОТАН МТК 233 «Измерительная аппаратура для основных электрических величин»
ВНЕСЕН Госстандартом Российской Федерации
2 ПРИНЯТ Межгосударственным Советом по стандартизации, метрологии и сертификации (протокол № 6-94 от 21 октября 1994 г.)
За принятие проголосовали:
|
Наименование государства |
Наименование национального органа по стандартизации |
|
Азербайджанская Республика |
Азгосстандарт |
|
Республика Армения |
Армгосстандарт |
|
Республика Беларусь |
Белстандарт |
|
Республика Грузия |
Грузстандарт |
|
Республика Казахстан |
Госстандарт Республики Казахстан |
|
Кыргызская Республика |
Кыргызстандарт |
|
Республика: Молдова |
Молдовастандарт |
|
Российская Федерация |
Госстандарт России |
|
Республика Узбекистан |
Узгосстандарт |
|
Украина |
Госстандарт Украины |
3 Постановлением Комитета Российской Федерации по стандартизации, метрологии и сертификации от 14.09.95 № 474 государственный стандарт ГОСТ 26.201.1-94 введен в действие непосредственного в качестве государственного стандарта Российской Федерации с 1 июля 1996 г.
Настоящий стандарт содержит полный аутентичный текст международного стандарта МЭК 552-77 «Система КАМАК. Организация многокрейтовых систем. Требования к магистрали ветви и крейт-контроллеру КАМАК типа А1»
4 ВЗАМЕН ГОСТ 26.201.1-84
ГОСТ
26.201.1-94
(МЭК 552-77)
МЕЖГОСУДАРСТВЕННЫЙ СТАНДАРТ
Система камак
ОРГАНИЗАЦИЯ МНОГОКРЕЙТОВЫХ СИСТЕМ
Требования к магистрали ветви и крейт-контроллеру КАМАК типа А1
САМАС. Organization of multi-crate
systems.
Specification of the Branch-highway and CAMAC crate controller type A1
Дата введения 1996-07-01
1 ВВОДНАЯ ЧАСТЬ
1.1 Общие положения
Консультативный комитет по электронике и дальней связи (АСЕТ) рекомендовал, чтобы Технический комитет № 45 был ответственен за введение стандартов МЭК - Международной электротехнической комиссии, - определяющих стандартный интерфейс КАМАК.
Характеристики КАМАК, определенные в документе EUR ATOM EUR 4100е (1972 г.), являются предметом ГОСТ 27080 Модульная система приборов для обработки данных. Система КАМАК.
Настоящий стандарт устанавливает дополнительные характеристики КАМАК согласно документу EUR ATOM EUR 4600е (1972 г.).
1.2 Назначение
ГОСТ 27080 устанавливает основные характеристики модульной системы контрольно-измерительной аппаратуры КАМАК, обеспечивающей стыковку преобразователей и приборов с цифровыми контроллерами и электронно-вычислительными машинами (далее - ЭВМ). Основой системы взаимной связи между модулями и контроллером в пределах одного каркаса (крейта) является стандартная магистраль крейта КАМАК. Многократные системы могут быть построены как одна или несколько структур, называемые ветвями, в которых магистраль ветви (MB) обеспечивает средства взаимной связи между драйвером MB (далее - драйвером) и крейт-контроллерами (не более семи).
Настоящим стандартом установлены сигналы, временные соотношения и логическая организация взаимодействия крейт-контроллеров и драйверов, подключаемых в MB через 132-контактный разъем.
В приложении А определены характеристики крейт-контроллера, которые обеспечивают аппаратную и программную совместимость. Приложение может рассматриваться либо как формальное определение стандартного крейт-контроллера КАМАК типа A1 (CCA1), либо как общие рекомендации, обуславливающие единообразие крейт-контроллеров.
1.3 Область применения
Стандарт распространяется главным образом на ядерное приборостроение, но может быть также использован в других областях, в которых требуются модульные электронные блоки для приема и преобразования сигналов ввода/вывода с целью цифровой обработки данных, обычно ассоциируемой с аппаратурой вида контроллера, ЭВМ, либо иного автоматического устройства обработки данных.
Для аппаратуры контроля и системы управления реактора могут также использоваться другие многокрейтовые системы.
а) Стандарт распространяется на системы, образованные крейтами КАМАК или крейтами, совместимыми с КАМАК, содержащими модули и контроллер, который соединен с MB, обеспечивающий бит-параллельную передачу данных.
Последующие стандарты МЭК могут распространяться, например, на магистраль с последовательной передачей битов или байтов.
б) Стандарт применим к последовательным передачам бит-параллельных слов, разрядностью слова не более 24 битов, между драйвером и крейтами (числом до семи).
в) Технические характеристики и внутренние структуры крейт-контроллеров и драйверов и физическая природа самой магистрали ветви не являются предметом регламентации данным стандартом, за исключением случаев, когда они влияют на совместимость частей системы с крейт-контроллером типа А1.
Для того, чтобы констатировать соответствие техническим требованиям магистрали ветви КАМАК, любое оборудование или система должны соответствовать всем обязательным положениям стандарта, за исключением приложения А. Любое оборудование, сконструированное в виде вставных блоков КАМАК, должно соответствовать всем обязательным положениям ГОСТ 27080.
Для того, чтобы констатировать соответствие техническим требованиям крейт-контроллера КАМАК типа А1, оборудование должно соответствовать всем обязательным положениям приложения А настоящего стандарта.
Необязательно, чтобы оборудование, соединенное с MB, полностью соответствовало настоящим техническим требованиям или чтобы оно было сконструировано в виде вставных блоков КАМАК. Однако необходимо, чтобы все подключаемые к MB устройства не изменяли характеристик MB и крейт-контроллеров, установленных данным стандартом.
1.4 Нормативные ссылки
В настоящем стандарте использованы ссылки на следующие стандарты:
ГОСТ 26.201.2-94 Система КАМАК. Последовательная магистраль интерфейсной системы
ГОСТ 27080-93 КАМАК. Модульная система технических средств для обработки данных
2 ФОРМА ВЫРАЖЕНИЯ ТРЕБОВАНИЙ
Настоящий стандарт рекомендуется использовать совместно с ГОСТ 27080 как дополняющий последний. Никакая часть данного стандарта не заменяет или модифицирует ГОСТ 27080.
Положения, которые определяют обязательные правила, взяты в рамки и обычно сопровождаются глаголом «должен» (must).
Глагол «рекомендуется» (should) применяют для указания предпочтительного использования, которому нужно следовать, если нет достаточных причин поступать иначе.
Слово «может» (may) означает допустимость тех или иных положений и оставляет свободу выбора.
Характеристика (параметр), определяемый как «резервный», не должна использоваться до тех пор, пока ее назначение не будет конкретна регламентировано.
Слово «свободный» указывает на отсутствие в определенных границах ограничения в использовании частной характеристики.
3 ВЕТВЬ
Многокрейтовая система КАМАК состоит из одной или нескольких ветвей, каждая из которых имеет свою магистраль ветви, являющуюся средством связи между драйвером и крейт-контроллерами. Во время каждой операции на ветви драйвер может сообщаться максимум с семью крейт-контроллерами.
Все драйверы, а также крейт-контроллеры имеют стандартное сопряжение-порт*, с помощью которого они соединяются с магистралью ветви. Каждый порт состоит из 132-контактного соединителя (для 65 сигнальных линий и соответствующих им обратных линий связи плюс экран кабеля) с определенным назначением каждого контакта. Каждый крейт-контроллер имеет два идентичных соединенных внутри порта, что позволяет MB иметь конфигурацию в виде цепочки (черт. 1). Возможны иные конфигурации, например конфигурация (черт. 2), в которой драйвер расположен не на конце MB и некоторые крейты соединяются с MB через один порт.
* «Сопряжение-порт» означает «вход или выход цепи».
В дополнение к своему системному режиму работы (on-line) крейт-контроллеры имеют автономный режим работы (off-line), который позволяет им оставаться физически подключенными к MB и в то же время игнорировать (но и не мешать) все операции в MB. В случае необходимости драйвер может опознать адреса крейтов, которые соответствуют крейт-контроллерам, находящимся в системном режиме работы.
Основным режимом работы MB является Командный режим. Драйвер, который обычно связан с системным контроллером или ЭВМ, вырабатывает команду во время каждой операции на MB. Эта команда включает указание адреса крейтом для выбора одного или нескольких крейт-контроллеров. Каждый адресуемый крейт-контроллер принимает команду с MB и генерирует соответствующую команду на магистрали крейта (МК) (номер станции, субадреса и функцию). Во время операции «Чтение» сигналы данных генерируются модулем на шины чтения МК, передаются на шины MB посредством крейт-контроллера и принимаются драйвером. Во время операции «Запись» драйвер генерирует сигналы данных на MB, затем они передаются с помощью крейт-контроллера и принимаются выбранным модулем. Во время других командных операций не происходит передачи данных чтения или записи через MB.
Цепочная конфигурация многокрейтовой системы КАМАК на основе магистрали ветви
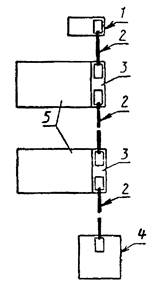
1 - устройство согласования; 2 - магистраль ветви; 3 - крейт-контроллер; 4 - драйвер ветви и устройство согласования; 5 - один из семи крейтов
Черт. 1
Пример конфигурации многокрейтовой системы КАМАК на основе магистрали ветви

1 - крейт-контроллер; 2 - магистраль ветви; 3 - драйвер ветви без устройства согласования; 4 - устройство согласования; 5 - один из семи крейтов
Черт. 2
Магистраль ветви имеет две возможности по «обработке требований», которые позволяют драйверу реагировать на L-сигналы запроса от модулей. При одноуровневой обработке требований, при которой лишь фиксируется наличие требований без их идентификации, крейт-контроллеры передают сигналы запроса как один общий сигнал «запрос MB». При многоуровневом сборе требований, позволяющем драйверу идентифицировать 24 различных требования, имеется режим работы MB для сортировки запросов L. При этом драйвер вырабатывает требование сортировки L (в общем случае в результате приема сигнала «Запрос MB») и каждый подключенный к линии крейт-контроллер реагирует посредством формулирования выбора или перегруппировки своих L-сигналов запроса в форме слова запросов GL, состоящего из 24 бит. Слова запросов GL-заявок всех крейтов передаются по MB к драйверу MB.
В магистрали ветви во время выполнения командных операций шины данных используются для передачи информации в обоих направлениях между крейт-контроллерами и драйвером MB. Эти шины используют также для передачи маски требований из слов запросов GL в режиме работы по обработке требований.
Передачи через MB в любом режиме обеспечиваются сигналами синхронизации взаимного обмена, которые автоматически определяют время каждой операции в MB таким образом, чтобы оно соответствовало реальным задержкам передачи и характеристикам применяемых контроллеров.
Начало обмена осуществляется только по сигналу «Общее управление», который передается через MB на МК.
4 ИСПОЛЬЗОВАНИЕ ШИН В МАГИСТРАЛИ ВЕТВИ
Каждая шина MB должна использоваться в соответствии с обязательными требованиями, рассмотренными детально в следующих разделах. В табл. 1 приводятся названия, стандартные обозначения и источники сигналов.
Обозначение отдельных шин порта MB, соответствующих по функциям таким же шинам МК, дается с добавлением буквы В перед обозначением шины, например шина функции в МК обозначается F, а для порта MB - BF.
Таблица 1 - Шины сигналов в портах MB
|
Обозначение |
Генерируют |
Число линии сигнала |
Использование |
||
|
Команда |
Адрес крейта |
BCR1 - BCR7 |
Драйвер |
7 |
Каждая шина указывает один крейт MB |
|
Номер станции |
BN 1, 2, 4, 8, 16 |
Драйвер |
5 |
Номер станции в двоичном коде |
|
|
Субадрес |
ВА 1, 2, 4, 8 |
Драйвер |
4 |
Аналогично шинам А на МК |
|
|
функция |
BF 1, 2, 4, 8, 16 |
Драйвер |
5 |
Аналогично шинам F на МК |
|
|
Данные |
Чтение |
BRW1 - BRW24 |
Драйвер (W) или крейт-контроллер (R, GL) |
24 |
Для данных чтение/запись и слов запросов (GL) |
|
Запись |
|||||
|
Состояния |
Ответ |
BQ |
Крейт-контроллер |
1 |
Аналогично шине Q на МК |
|
Команда принята |
ВХ |
Крейт-контроллер |
1 |
Аналогично шине X на МК |
|
|
Синхронизация |
Сигнал синхронизации А |
ВТА |
Драйвер |
1 |
Указывает на наличие команды |
|
Сигнал синхронизации В |
ВТВ1 - ВТВ7 |
Крейт-контроллер |
7 |
Каждая шина указывает на наличие данных и т.д., переданных крейт-контроллером |
|
|
Сбор требований |
Запрос MB |
BD |
Крейт-контроллер |
1 |
Указывает на наличие требования на обслуживание |
|
Запрос на GL (отсортированные запросы) |
Драйвер |
1 |
Запрос на операцию в режиме GL |
||
|
Общее управление |
Пуск |
BZ |
Драйвер |
1 |
Аналогично шине Z на МК |
|
Резервные |
- |
BV6 и BV7 |
Драйвер |
2 |
Для будущих потребителей |
|
Свободные |
- |
BV1 и BV5 |
- |
5 |
Для нестандартизованных требований |
Индивидуальная спаренная линия возврата предусмотрена для каждой сигнальной линии. Две линии предусмотрены для соединения с экраном кабеля MB, если он имеется.
4.1 Команда
Сигналы команды используют для управления операциями в командном режиме, во время которого сигнал на линии BG (см. 4.4.2) должен быть в состоянии «0». Эти сигналы передаются драйвером по шинам BCR, BN, ВА и BF в порт магистрали ветви.
4.1.1 Адреса крейтов (BCR1 - BCR7)
Семь крейт-контроллеров, которые могут быть адресованы в течение любой операции MB, должны быть соединены каждый только со своими индивидуальными линиями BCR (хотя во всех портах MB имеются 7 линий BCR).
Каждый крейт-контроллер должен иметь средства для выбора соответствующей линии BCR (обозначенной BCRi), например с использованием переключателя или монтируемой перемычки. Присвоение шин BCR крейтам не обязательно связано с физическим расположением крейтов по ветви. Драйверу MB разрешается посылать одновременно сигналы в более чем одну линию BCR с целью выбора нескольких крейтов для одной операции.
Рекомендуется предусмотреть в крейт-контроллере средство защиты от помех в выбранной шине BCR, например интегрирование сигналов BCR на выходе или интегрирование сигналов, полученных от сигнала BCR при внутрисхемных передачах.
Каждый крейт-контроллер (см. 4.3) соединен не только с одной из шин BCR, но также с одной из семи соответствующих шин ВТВ.
Магистраль ветви не сможет функционировать, если более чем один подключенный крейт-контроллер соединен с одной и той же шиной BCR. Предлагается способ, который позволит избежать такой ситуации (см. 5.4).
4.1.2 Номер станции (BN 1, 2, 4, 8, 16)
Сигналы этих пяти линий указывают на номер станции в двоичном коде, который должен использоваться в одном или нескольких адресованных крейтах; они декодируются в крейт-контроллере.
В крейт-контроллере используют 32 кода согласно табл. 2.
Таблица 2 - Коды номеров станций, используемые в крейт-контроллерах
|
Применение |
В, S1 и S2 |
Примечание |
|
|
(0) |
Резервный |
- |
- |
|
(1) - (23) |
Адресация к соответствующей нормальной станции |
Да |
К нормальным станциям, занятым крейт-контроллерами, адресации не должно быть |
|
(24) |
Адресация к нормальной, предварительно выбранной станции |
Да |
- |
|
(26) |
Адресация ко всем нормальным станциям |
Да |
- |
|
(28) |
Адресация только к крейт-контроллеру |
- |
- |
|
(30) |
Адресация только к крейт-контроллеру |
Нет |
Нет операции на МК |
|
(25, 27, 29, 31) |
Резерв |
- |
- |
По меньшей мере одна из нормальных станций занята крейт-контроллером и имеются коды номеров станций для индивидуального обозначения оставшихся 23 нормальных станций. Кроме того, имеются коды, позволяющие адресоваться одновременно ко всем нормальным станциям или станциям, указанным в «регистре номеров станций» (SNR).
Два других кода номеров станции позволяют адресоваться к контроллеру и к возможным дополнительным модулям в крейте.
4.1.3 Субадрес (ВА 1, 2, 4, 8)
Сигналы этих четырех шин должны передаваться в шины субадресов МК (А 1, 2, 4, 8) через крейт-контроллер, который во время приема команд находится в системном режиме работы.
4.1.4 Функция (BF 1, 2, 4, 8, 16)
Сигналы этих пяти шин должны передаваться в шины функций МК крейта (F 1, 2, 4, 8, 16) через крейт-контроллер, который во время приема команд находится в системном режиме работы.
4.2 Данные и состояние
4.2.1 Чтение и запись (BRW1 - BRW24)
Эти 24 шины должны использоваться при операциях чтения во время приема команд для передачи данных драйверу с адресованного крейт-контроллера, т.е. на BRW1, с соответствующей шины R1 МК и т.д. Они должны также использоваться при операциях записи во время приема команд для передачи данных драйвера на крейт-контроллеры, т.е. с BRW1 на соответствующую шину W1 МК и т.д.
В режиме обработки требований GL они используются для передачи драйверу соответствующих требований со всех крейт-контроллеров, находящихся в системном режиме работы.
Формирование сигналов с состоянием «1» на этих шинах осуществляется драйвером во время команд записи и находящимся в системном режиме работы крейт-контроллерами в режиме обработки GL требований или при выполнении команд чтения.
4.2.2 Ответ (BQ)
Во время приема команд, как и в МК, каждый подключенный и адресованный крейт-контроллер должен передавать сигнал BQ, соответствующий сигналу Q в МК (BQ = Q). Во время командного цикла, при котором определяется состояние крейт-контроллера, последний должен вырабатывать соответствующий его состоянию ответ по шине BQ, а в МК при этом никаких операций не выполняется. Во всех остальных случаях крейт-контроллер должен передавать BQ = 0. Сигнал в шине BQ, принимаемый драйвером, является результатом логической комбинации или сигналов всех крейт-контроллеров.
4.2.3 Команда принята (ВХ)
Во время приема команд в совокупности с операцией в МК каждый крейт-контроллер, который находится в системном режиме работы, должен передавать сигнал ВХ, соответствующий сигналу X в МК (ВХ = X). Во время всех остальных командных операций при приеме команды крейт-контроллер должен передавать ВХ = 1, если нет приема команды ВХ = 0.
Сигнал по шине ВХ, принимаемый драйвером, является результатом комбинации ИЛИ сигналов всех крейт-контроллеров.
4.2.4 Ответ ВХ, принимаемый ДВ на команду обработки GL-требований по запросу BG.
Генерация ВХ полностью определяется для операций командного режима (4.23 и А.8) для крейт-контроллера А1. GL-операции обычно являются мультиадресными. В этих случаях сигнал ВХ, принимаемый ДВ, не служит точным указанием того, что все крейты выполнили операцию. Следовательно, принимаемый командный ответ ВХ на GL-запрос BG не определенный.
В данной ситуации при GL-операции рекомендуется следующее:
1 При адресации к крейт-контроллеру типа А1 ему следует генерировать ВХ = 0.
2 Во время GL-операции драйвер ветви не должен реагировать на состояние линии ВХ.
4.2.5 Блокировка сигналов X и ВХ «Команда принята» (дополнительная информация).
Интерфейсы ЭВМ системы КАМАК либо крейт-контроллера, либо драйвера ветви, которые обеспечивают контроль ответом X и ВХ принятой команды, должны также иметь режим работы, когда ответ X = 0 (ВХ = 0) не является конечным результатом автоматического прекращения работы системы. Этот режим необходим для того, чтобы обеспечить «нормальную» работу системы, имеющей вставные блоки, которые не генерируют и не передают сигналы в ответ на принятую команду. Такие вставные блоки не всегда соответствуют сигналу X = 0. При передаче блоков данных в режиме адресного сканирования комбинация Q = 0, X = 0 не должна являться конечным результатом автоматического прекращения работы системы.
4.3 Синхронизация линии (ВТА, ВТВ1 - ВТВ7)
Синхронизация всех операций в режиме команд или в режиме в MB управляется синхроимпульсами. Драйвер вызывает начало операций, передавая сигнал в общую линию ВТА, затем каждый адресованный крейт-контроллер отвечает передачей сигнала в индивидуальную линию ВТВ. В каждом порте MB имеется семь линий ВТВ, каждый крейт-контроллер использует линию ВТВ, соответствующую шине BCRi, посредством которой он адресован. Каждый подключенный крейт-контроллер должен генерировать ВТВ = 1, если он не адресован. Драйвер (и другие крейт-контроллеры) может выделить среди линий ВТВ линию, которая соответствует неподключенным или отсутствующим крейтам (ВТВ = 0) (см. 5.4).
Драйвер генерирует ВТА = 1, указывая, что он будет передавать команду или запрос GL в порт, и поддерживает их до тех пор, пока не получит информацию BRW или BQ. Каждый крейт-контроллер генерирует ВТВi во время установления им данных или информации BQ во время операции в ветви.
Сигналы синхронизации должны передаваться через схемы, реализующие комбинацию ИЛИ, и характеризоваться временем нарастания фронта от 10 до 90 % уровня в интервале (100 ± 50) нс.
Рекомендуется, чтобы крейт-контроллер имел средство защиты от помех в линии ВТА; например, интегрирование сигнала ВТА на его входе или внутрисхемное интегрирование сигнала, производного от сигнала ВТА. Более полно синхронизация описана в разделе 5.
4.4 Обработка требований
В основном сигналы заявок (L), передаваемые модулями, расположенными в какой-либо части MB, требуют генерирования команды или последовательности соответствующих команд. Поэтому MB имеет два способа передачи запросов на обслуживание, один из которых связан с сигналом запроса MB, а другой - с сигналом на считывание отсортированных запросов GL.
4.4.1 Запрос MB (BG).
Каждый крейт-контроллер может генерировать сигнал запроса, являющийся результатом логической комбинации отсортированных сигналов МК, переданных в общую шину запросов MB (BD) через внутреннюю схему ИЛИ. Так как не имеется ограничений, касающихся моментов, в которые сигнал BD может быть изменен, время нарастания фронта от 10 до 90 % уровня должно лежать в интервале (100 ± 50) нс. Задержка между моментом, в который сигнал L достигает стабильного состояния «1» или «0» на управляющей станции крейт-контроллера, и моментом, в который сигнал BD достигает стабильного состояния, соответствующего «1» или «0» в порте MB того же контроллера, не должно превышать 400 нс.
Максимальная задержка может частично вызываться крейт-контроллером или другим блоком, участвующим в генерировании сигналов L (например блок сортировки заявок на обслуживание, соединенных с крейт-контроллером типа А1). Это максимальное запаздывание, вызываемое крейт-контроллером типа А1, определено в А9.2.
Драйвер начинает операции в режиме GL путем генерирования сигнала на чтение запросов (BG), сопровождаемого адресными сигналами BCR, предназначенными для всех подключенных крейтов. Каждый адресованный крейт-контроллер передает 24-разрядное слово GL в шины BRW и драйвер читает комбинацию ИЛИ этих слов. В каждом крейт-контроллере L-сигналы МК сортируются с целью привязки соответствующих L-сигналов с определенными позициями разрядов слова GL.
4.4.2 Сортировка запросов (BG)
Сортировка может быть организована таким образом, что драйвер будет читать слово, указывающее крейты, которые требуют обслуживания или действия (таких, как прерывание программы или автономные передачи). При сортировке с целью установления приоритетов в требованиях обслуживания модулей рекомендуется, чтобы запрос в шине BRW (n + 1) имел приоритет над запросом в шине BRW (n).
Крейт-контроллер типа А1 предусматривает дополнительное средство доступа к информации, касающейся сигналов L-заявки (см. А.9.4 и табл. 9).
4.5 Общее управление
Сигнал пуска ветви (BZ) передается драйвером и обладает абсолютным приоритетом относительно других сигналов ветви. В совокупности с BZ сигналы синхронизации на MB не используют.
Для того, чтобы в крейт-контроллерах могли устраняться помехи небольшой длительности, драйвер должен поддерживать BZ = 1 в течение не менее 10 мкс. В следующие 5 мкс после снятия с BZ не должна начинаться какая-либо операция, связанная с приемом команд или режимом GL.
4.5.1 Пуск ветви (BZ)
Крейт-контроллер, получив сигнал «Пуск» ветви (BZ), минимальная длительность которого (3 ± 1) мкс, должен передавать сигнал пуска (Z) в МК в сопровождении сигнала «Занято» (В) и сигнала стробирование (S2), как указано в ГОСТ 27080. Генерирование сигнала S1 в дополнение к сигналам В и S2 не является обязательным, и модули с МК не должны рассчитывать на его наличие.
Все крейт-контроллеры должны включать средства генерирования сигналов установки на ноль (С) и запрета (I) в МК.
4.5.2 Пуск МК (Z), сброс (С), запрет (I).
На MB не имеется шин для сигналов общего управления С и I. Желательно, чтобы крейт-контроллер генерировал сигналы Z и С, мог установить и сбрасывать сигнал запрета I на МК при выполнении командных операций на MB, как это указано в табл. 9.
Крейт-контроллер может также передавать сигналы общего управления по МК в ответ на сигналы с его передней панели, если только это явно не запрещено (как в случае крейт-контроллера типа А1).
4.6 Резервные и свободные шины (ВV1 - BV7)
Сигнальные и возвратные линии ВV1 - BV7 имеются на всех портах ветви. Там, где имеются несколько портов, как, например, в крейт-контроллере, эти линии должны быть соединены через соответствующие контакты (см. также А1.1). Сигнальные и возвратные линии BV6 и BV7 резервируются для будущих требований и не должны использоваться без специального назначения. Любое назначение проводится в порядке BV7, BV6.
Сигнальные и возвратные линии BV1 - BV5 являются свободными линиями и имеют все возможное применение. Однако их использование должно подчиняться требованиям стандарта. При этом сигналы этих линий должны соответствовать разделу 7 (например, эти линии нельзя использовать для сигналов с другими характеристиками или для обеспечения энергопитания).
Любой асинхронный по отношению к операции ветви сигнал должен генерироваться от источника, который определяет время установления сигнала в соответствии с 4.3 и 4.4.1. Следует заметить, что линии BV согласовываются на одном конце шины (предпочтительнее на обоих концах), как определено в 7.3 и табл. 8.
Для линий BV1 - BV5 не определены условия использования и могут возникнуть несоответствия между элементами системы, по разному использующими эти линии. При правильно установленных условиях использования этих линий подобные несоответствия могут быть ограничены.
5 ОПЕРАЦИИ НА МАГИСТРАЛИ ВЕТВИ
Все передачи информации (чтение и запись данных, ответ Q, прием команд X и чтение GL) через порт MB организованы в командах MB. Синхронизация каждой операции команды управляется сигналами обращения ВТА и ВТВ1 - ВТВ7 и может быть разделена на четыре фазы, как это указано в табл. 3, 4 и на черт. 3, 4.
Таблица 3 - Последовательность операций командного цикла

Таблица 4 - Временная диаграмма при выполнении операции сортировки L-заявок

Последовательность событий во время операции чтения на магистрали ветви

Черт. 3
Последовательность событий во время операции запись на магистрали ветви

Черт. 4
В течение фазы 1 драйвер передает в порт один или несколько адресов крейта, являющихся частью команды (с данными записи, если команда этого требует) и сопровождающих запрос на чтение GL. После задержки, объясняемой перекосом сигналов, драйвер устанавливает ВТА = 1 для начала следующей фазы.
Во время фазы 2 каждый адресованный крейт-контроллер отвечает на сигнал ВТА - 1 или исполнением в МК операции согласно команде и выставлению в порт сигналов Q, X и всех данных чтения, или как результат сортировки L-заявок (GL). Затем он устанавливает ВТВi = 0 на индивидуальной шине ВТВ. Драйвер начинает следующую фазу только после получения от всех адресованных контроллеров сигналов BTBi = 0.
Во время фазы 3 драйвер обеспечивает задержку для компенсации перекосов сигналов и затем принимает сигналы Q, X и данные чтения или отсортированные L-заявки. После этого драйвер устанавливает ВТА = 0 и начинается следующая фаза.
В течение фазы 4 каждый адресованный крейт-контроллер в ответ на ВТА = 0 или заканчивает операцию на MB и снимает сигналы Q, X и данные чтения в порт, или снимает отсортированные L-заявки. Затем он устанавливает ВТВi = 1 на индивидуальной шине ВТВ.
Драйвер заканчивает фазу 4 после получения ВТВi = 1 от всех адресованных крейт-контроллеров; он готов начать другую операцию в MB немедленно (в этом случае новая команда или новые данные записи, или новый запрос на чтение L-заявок имеет место) или позже (в этом случае имеющиеся сигналы снимаются).
Шины ВТВ, которые отходят от отключенных или отсутствующих крейт-контроллеров, находятся в состоянии «0» в течение всей операции, шины, соответствующие неадресованным, но подключенным крейт-контроллерам, находятся в состоянии «1».
Синхронизация четырех фаз осуществляется автоматически во время передачи по MB, во время приема передачи крейт-контроллерам и т.д. при помощи сигналов взаимного обращения.
Синхронизация операций в режиме приема команд рассмотрена в 5.1. Синхронизация операций в режиме GL рассмотрена в 5.2.
В действительности различные сигналы команды и данных в MB отличаются разными перекосами, этот вопрос рассмотрен в 5.3.
Операции на MB не будут успешно выполняться, если драйвер или адресованные крейт-контроллеры не отвечают на сигналы обращения в необходимой последовательности. Поэтому желательно, чтобы драйверы были снабжены таймером для констатации того, что операция выполняется за определенное время и что соответствующее действие при этом было закончено. При принятии мер предосторожности с целью исключения неполных операций вследствие адресации к отключенным или отсутствующим крейт-контроллерам можно использовать метод опознания этих крейтов, описанный в 5.4.
Соотношения между операцией на MB и операцией на МК в адресованных крейтах должно удовлетворять требованиям, изложенным в табл. 3 и в ГОСТ 27080.
Временные соотношения между сигналами стробирования (S1 и S2) в МК и сигналами обращения (ВТА и ВТВ) в КС подробно определены для крейт-контроллера типа А1 (см. А.7). Для других типов крейт-контроллеров временные соотношения будут зависеть, например, от наличия регистров данных и команды.
5.1 Командная операция
Последовательность операций в командном цикле представлена в табл. 3.
Далее детально рассматриваются четыре фазы операции чтения и отличия ее от других типов операций. Один или несколько крейтов могут быть адресованы каждой операции.
5.1.1 Операция чтения: фаза 1
Последовательность операции чтения (кода функции от 0 до 7) приведена на черт. 3.
Фаза 1 имеет отношение к операциям в драйвере, который выставляет полную команду (BCR, BN, ВА, BF (0 - 7) в свой порт, а затем после задержки, компенсирующий перекос (см. 5.3), устанавливает ВТА = 1, после чего начинается фаза 2.
5.1.2 Операция чтения: фаза 2
После задержки в цепи передачи и времени установления сигнала на MB каждый крейт-контроллер получает сигналы команды и затем, после того как они установятся, сигнал ВТА = 1. Фаза 2 имеет отношение к операциям во всех адресованных крейт-контроллерах.
Каждый адресованный крейт-контроллер (BCRi = 1) отвечает на ВТА = 1, начиная синхронизацию операции на МК. Операция на МК начинается сигналом ВТА после его интегрирования согласно рекомендациям 4.3 (см. черт. 3).
В момент t0 этой операции (см. черт. 9 ГОСТ 27080) должны генерироваться сигнал занятости (В) на МК и сигналы команд.
Рекомендуется, чтобы сигналы В и N (полученные путем дешифрации сигналов BN) генерировались в момент получения крейт-контроллером сигнала ВТА = 1, хотя сигналы А и F (которые воспроизводят соответствующие сигналы ВА и BF) могут генерироваться раньше при получении ВА и BF (см. черт. 3 и 4).
Адресованный блок отвечает на команду, передавая сигналы QX и другие данные чтения, которые устанавливаются на МК в момент t3 (см. черт. 9 ГОСТ 27080). Эти сигналы воспроизводятся крейт-контроллером на шинах BRW, BQ и ВХ и в порте в течение фазы 3. Если команда адресуется регистру крейт-контроллера, данные чтения и информация Q не должны передаваться через МК. После того, как крейт-контроллер выставляет сигнал BRW, BQ и ВХ, он генерирует ВТВi = 0.
Драйвер начинает фазу 3 через
некоторое время после получения сигнала ВТВ = 0 от всех адресованных крейтов.
На черт. 3 представлены сигнал ВТВi = 0, поступающий от крейта, а также
сигнал ВТВ от других адресованных крейтов. Драйвер ожидает последний сигнал
ВТВ. Например, он может регистрировать условие: (![]() 1 +
1 + ![]() 1) × (
1) × (![]() 2 +
2 + ![]() 2) ... (
2) ... (![]() 7 +
7 + ![]() 7) = 1.
7) = 1.
Для каждого неадресованного
крейта ![]() =
1 и, следовательно, состояние
=
1 и, следовательно, состояние ![]() не принимается во внимание. Для каждого
адресованного крейта
не принимается во внимание. Для каждого
адресованного крейта ![]() = 0, следовательно, условие
удовлетворяется, только если
= 0, следовательно, условие
удовлетворяется, только если ![]() = 1.
= 1.
5.1.3 Операция чтения: фаза 3
Во время фазы 3 драйвер обеспечивает задержку для учета перекоса и затем предпринимает все необходимые действия для принятия информации шин BRW, BQ и ВХ. После получения этой информации драйвер генерирует ВТА = 0, после чего начинается фаза 4.
5.1.4 Операция чтения: фаза 4
Каждый адресованный крейт-контроллер получает ВТА = 0 через некоторое время и с этого момента может изменять свои выходные сигналы в шинах BRW, BQ и ВХ. Во время фазы 4 крейт-контроллер выполняет любое другое действие, необходимое для того, чтобы закончить операцию на МК.
Результатом этого может быть изменение сигналов чтения и ответа Q (указано прерывистой линией на черт. 3) вследствие операций, выполненных в ответ на сигнал стробирования S2 в адресованных блоках.
В конце операции в КС (t9) крейт-контроллер снимает сигналы В и N. Он устанавливает на ноль выходы шин BRW, BQ и ВХ. Он может выполнить это немедленно после окончания операции на МК в момент t9 (черт. 3), если между МК и шинами MB срабатывают вентильные схемы. Это обязательное требование для крейт-контроллера типа А1. В ином случае он может снимать сигналы BRW и BQ через 400 нс после момента t12, в который заканчивается операция на МК, принимая во внимание тот факт, что адресованные модули снимают свои сигналы в шинах R и Q при получении сигнала N = 0.
В обоих случаях крейт-контроллер генерирует сигнал BTBi = 1 при установке на ноль всех выходных сигналов в шинах BRW и ВХ на MB, В и N на МК.
Драйвер заканчивает фазу 4
через некоторое время после получения ВТВ = 1 от всех адресованных крейтов. В
этих целях он может, например, регистрировать условие: (![]() 1 + ВТВ1) × (
1 + ВТВ1) × (![]() 2 + ВТВ2) ... (
2 + ВТВ2) ... (![]() 7 + ВТВ7) = 1.
7 + ВТВ7) = 1.
Для каждого неадресованного
крейта ![]() =
1 состояние BTBi не принимается во внимание. Для каждого
адресованного крейта
=
1 состояние BTBi не принимается во внимание. Для каждого
адресованного крейта ![]() = 0 условие удовлетворяется, если ВТВi = 1. С этого момента драйвер может
установить на ноль сигналы команды и начать новую операцию в режиме приема
команд или в режиме GL. Крайний случай (см. черт. 3) возникает тогда, когда фаза 1 по
следующей операции следует немедленно так, что драйвер снимает сигналы команды
одной операции, одновременно
устанавливая сигналы команды или сигналы GL следующей операции.
= 0 условие удовлетворяется, если ВТВi = 1. С этого момента драйвер может
установить на ноль сигналы команды и начать новую операцию в режиме приема
команд или в режиме GL. Крайний случай (см. черт. 3) возникает тогда, когда фаза 1 по
следующей операции следует немедленно так, что драйвер снимает сигналы команды
одной операции, одновременно
устанавливая сигналы команды или сигналы GL следующей операции.
5.1.5 Операция записи
Временнáя диаграмма операции записи (коды функции 16 - 23) приведена на черт. 4. Она подобна диаграмме операции чтения за исключением того, что сигналы, соответствующие данным записи, генерируются драйвером одновременно с сигналами команды. Сигнал ВТВi = 1, поступающий от крейт-контроллера в течение фазы 4, обозначает, кроме того, что данные записи приняты.
5.1.6 Другие операции команды
Операции с кодами функций 8 - 15 и 24 - 31, которые не используют шины записи и чтения МК, используют шины Q и BQ. Их временнáя диаграмма подобна диаграмме операций чтения, приведенной выше. Сигнал Q на МК может быть изменен во время этих операций (см. 5.4.3 ГОСТ 27080), т. к. сигнал BQ также может быть изменен в любой момент.
5.2 Операции сортировки L-заявок
Операция в режиме «Сортировка» эквивалентна операции «Чтение», адресованной в несколько крейтов, в которой команда заменена сигналом запроса отсортированных заявок (BG = 1), сопровождаемым сигналами адресов всех подключенных крейт-контроллеров. Сигналы номера станции субадресов и функции не используются во время этой операции и не принимаются во внимание крейт-контроллерами. Выполнение режима GL обычно начинается сигналом запроса в MB BD = 1. Последовательность этой операции приведена в табл. 4.
Во время выполнения режима GL драйвер генерирует группу сигналов BCR таким образом, что BCRi = 0 в шинах, соответствующих отключенным или отсутствующим крейт-контроллерам, и BCRi = 1 в шинах, соответствующих подключенным крейт-контроллерам. Сигналы BCR сопровождаются сигналом BG = 1.
Рекомендуется добиться того, чтобы драйвер определял состояние крейт-контроллеров по состоянию шин ВТВ (5.4).
После того, как драйвер устанавливает сигналы BCR и сигнал чтения отсортированных заявок, он передает сигнал ВТА = 1. В ответ на сигналы BG, BCRi и ВТА каждый подключенный крейт-контроллер генерирует свое слово GL при помощи внутренней схемы ИЛИ в шинах BRW в порт MB, не генерируя сигналы МК: В, S1 или S2.
Процесс формирования слова GL не обязательно происходит в крейт-контроллере, он может реализоваться в другом блоке, например, в блоке заявок, соединенном с крейт-контроллером типа А1 (А.1.9). Сигналы L канала каркаса могут быть изменены в какой-то момент и вследствие этого могут также меняться сигналы BRW.
Каждый адресованный крейт-контроллер генерирует сигнал BTBi = 0 после того, как он передаст отсортированные заявки GL в шины BRW. Задержка в установлении информации GL имеет две причины. Во-первых, если сигнал L, поступающий от модуля, был снят в МК предыдущей операцией в командном режиме, может иметь место задержка, достигающая 400 нс, до повторного установления сигнала L в крейт-контроллере. Во-вторых, крейт-контроллер типа А1, определенный в приложении А, требует отдельного блока для сортировки заявок L. Это может вызвать дополнительные запаздывания вследствие формирования сигналов L в блоке сортировки заявок и запроса на отсортированные заявки в крейт-контроллере.
После того, как драйвер получает сигнал ВТВi = 0 от всех адресованных крейтов, он обеспечивает задержку, компенсирующую индивидуальные запаздывания, перед принятием слова GL, поступающего от шин BRW. После этого он генерирует ВТА = 0.
При получении сигнала ВТА = 0 крейт-контроллер снимает информацию GL в шинах BRW и генерирует сигнал ВТВi = 1. Операция заканчивается после того, как драйвер получает сигнал BTBi = 1 от всех адресованных крейт-контроллеров. Тогда он может снять сигнал BG и сигналы адресов крейтов.
5.3 Различные задержки (перекосы)
Запаздывания сигналов ВТА и ВТВ учитываются в целях обеспечения синхронизации при операциях ветви. Однако различные задержки могут иметь место между ВТА и каждым разрядом команды и данных записи, полученных крейт-контроллером, а также между ВТВ и каждым разрядом сигналов BRW, BQ и ВХ, полученных драйвером. Чтобы все сигналы команды были установлены в крейт-контроллере до получения сигнала ВТА, драйвер должен обеспечить соответствующую задержку до генерирования сигнала ВТА = 1. Он должен также задержать внутренние операции в ответ на сигнал ВТВ = 0, чтобы обеспечить предварительную установку всех данных и сигналов BQ и ВХ.
Эта коррекция запаздывания может быть фиксированной для учета максимально возможного времени запаздывания в установлении уровня сигналов или изменяемой для более точного соответствия в каждом конкретном случае. Дополнительная компенсация этих перекосов допустима на любом другом участке MB.
5.4 Идентификация подключенных крейт-контроллеров
В период между концом фазы 4 одной операции на MB и началом фазы 2 следующей операции драйвер получает сигнал ВТВi = 1 от крейт-контроллеров и сигнал BTBi = 0 от отсутствующих или отключенных крейт-контроллеров. Состояние шин ВТВ может выбираться драйвером в начале каждой операции для идентификации подключенных крейт-контроллеров.
Рекомендуется, чтобы драйвер идентифицировал подключенные крейт-контроллеры таким образом, чтобы в начале каждой операции GL были удовлетворены требования 5.2, которые предусматривают генерирование сигналов адресов всех подключенных крейт-контроллеров. Следовательно, драйвер генерирует сигнал BCRi = 1, если ВТВi = 1.
Драйвер может также идентифицировать подключенные крейт-контроллеры до начала любой операции во время приема и сравнивать их с адресами крейтов, указанных в команде. Это позволяет выполнять быстро операции, которые не были бы выполнены до конца вследствие адресации к отсутствующему или отключенному крейту; не дожидаться таймаута, который начинается только после выполнения операций (см. раздел 5). Этот способ идентификации подключенных крейт-контроллеров может использоваться для исключения возможности существования двух подключенных крейт-контроллеров с одним номером (см. 4.1.1). Для этого каждый крейт-контроллер может проверить, выполнено ли условие (ВТВi + BCRi) = 0. В этом случае он остается отключенным, если подключен крейт-контроллер с тем же адресом, независимо от того, адресован он (BCRi = 1) или нет (ВТВi = 1).
6 СОЕДИНИТЕЛИ
Порты MB снабжены 132-контактными соединителями. В табл. 5 приведен соединитель, удовлетворяющий требованиям данного стандарта. Розетка этого соединителя закреплена на драйвере ветви, крейт-контроллера и оконченном устройстве, она имеет 132 гнездовых контакта. Кабель снабжен съемным соединителем-вилкой со 132 контактными штырями.
Таблица 5 - Стандартный соединитель MB
Соединитель, отвечающий требованиям, представлен в ГОСТ 26.201.2.
Расположение контактов, основные размеры розетки и вилки представлены на черт. 5 и 6.
Порты MB (размещение соединителей на крейт-контроллере)

1 - розетка без фиксатора; 2 - вилка с фиксатором; 3 - кожух вилки; 4 - контакт 1; вид Б см. на черт. 6
Черт. 5
Порты MB: расположение контактов (вид спереди на неподвижную часть соединителя)
Вид Б
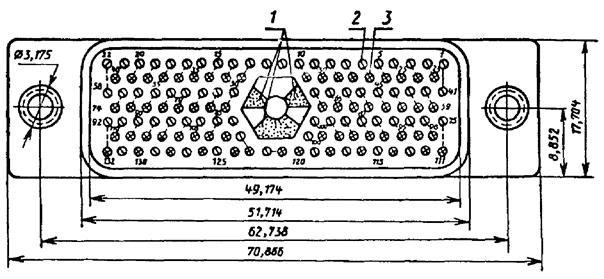
1 - проекция направляющих выступов; 2 - контакт, соответствующий обратной линии; 3 - контакт сигнальной линии
Черт. 6
Распределение сигнальных шин и шин возврата представлено в табл. 6 и 7, где даны обозначения сигналов и номера контактов.
Таблица 6 - Назначение контактов в портах: группировка по сигналам
|
Обратный контакт |
Сигнал |
|||
|
32 |
13 |
BCR1 |
|
Адрес крейта |
|
33 |
14 |
BCR2 |
||
|
34 |
15 |
BCR3 |
||
|
35 |
16 |
BCR4 |
||
|
67 |
50 |
BCR5 |
||
|
68 |
51 |
BCR6 |
||
|
69 |
52 |
BCR7 |
||
|
36 |
17 |
BN1 |
|
Адрес станции |
|
37 |
18 |
BN2 |
||
|
38 |
19 |
BN4 |
||
|
39 |
20 |
BN8 |
||
|
40 |
21 |
BN16 |
||
|
41 |
1 |
ВА1 |
|
Субадрес |
|
23 |
2 |
ВА2 |
||
|
24 |
3 |
ВА4 |
||
|
25 |
4 |
ВА8 |
||
|
70 |
53 |
BF1 |
|
Код функции |
|
71 |
54 |
BF2 |
||
|
72 |
55 |
BF4 |
||
|
73 |
56 |
BF8 |
||
|
74 |
57 |
BF16 |
||
|
93 |
76 |
BKW1 |
|
Линии чтение/запись |
|
94 |
77 |
BRW2 |
||
|
95 |
78 |
BRW3 |
||
|
96 |
79 |
BRW4 |
||
|
97 |
80 |
BRW5 |
||
|
98 |
81 |
BRW6 |
||
|
99 |
82 |
BRW7 |
||
|
100 |
83 |
BRW8 |
||
|
103 |
84 |
BRW9 |
||
|
104 |
85 |
BRW10 |
||
|
105 |
86 |
BRW11 |
||
|
106 |
87 |
BRW12 |
||
|
107 |
88 |
BRW13 |
|
Линии чтение/запись |
|
108 |
89 |
BRW14 |
||
|
109 |
90 |
BRW15 |
||
|
110 |
91 |
BRW16 |
||
|
112 |
113 |
BRW17 |
||
|
114 |
115 |
BRW18 |
||
|
116 |
117 |
BRW19 |
||
|
118 |
119 |
BRW20 |
||
|
124 |
125 |
BRW21 |
||
|
126 |
127 |
BRW22 |
||
|
128 |
129 |
BRW23 |
||
|
130 |
131 |
BRW24 |
||
|
61 |
44 |
BQ |
Ответ |
|
|
63 |
46 |
ВТА |
|
Синхронизация |
|
31 |
10 |
ВТВ1 |
||
|
11 |
12 |
ВТВ2 |
||
|
58 |
22 |
ВТВ3 |
||
|
132 |
92 |
ВТВ4 |
||
|
123 |
102 |
ВТВ5 |
||
|
120 |
101 |
ВТВ6 |
||
|
121 |
122 |
ВТВ7 |
||
|
60 |
43 |
BD |
|
Запрос сортировки |
|
59 |
42 |
BG |
||
|
62 |
45 |
BZ |
Пуск |
|
|
26 |
5 |
BV1 |
|
Свободные линии |
|
27 |
6 |
BV2 |
||
|
28 |
7 |
ВV3 |
||
|
29 |
8 |
BV4 |
||
|
39 |
9 |
BV5 |
||
|
64 |
47 |
BV6 |
|
Резервные линии |
|
65 |
48 |
BV7 |
||
|
66 |
49 |
ВХ |
||
|
111 |
75 |
BSC |
Экран кабеля |
|
Таблица 7 - Назначение контактов в портах MB: распределение по номерам
|
Сигнал |
|
|
1 |
ВА1 (R) |
|
2 |
ВА2 (R) |
|
3 |
ВА4 (R) |
|
4 |
ВА8 (R) |
|
5 |
BV1 (R) |
|
6 |
BV2 (R) |
|
7 |
ВV3 (R) |
|
8 |
BV4 (R) |
|
9 |
BV5 (R) |
|
10 |
ВТВ1 (R) |
|
11 |
ВТВ2 |
|
12 |
ВТВ2 (R) |
|
13 |
BCR1 (R) |
|
14 |
BCR2 (R) |
|
15 |
BCR3 (R) |
|
16 |
BCR4 (R) |
|
17 |
BN1 (R) |
|
18 |
BN2 (R) |
|
19 |
BN4 (R) |
|
20 |
BN8 (R) |
|
21 |
BN16 (R) |
|
22 |
ВТВ3 (R) |
|
23 |
ВА2 |
|
24 |
ВА4 |
|
25 |
ВА8 |
|
26 |
BV1 |
|
27 |
BV2 |
|
28 |
ВV3 |
|
29 |
BV4 |
|
30 |
BV5 |
|
31 |
ВТВ1 |
|
32 |
BCR1 |
|
33 |
BCR2 |
|
34 |
BCR3 |
|
35 |
BCR4 |
|
36 |
BN1 |
|
37 |
BN2 |
|
38 |
BN4 |
|
39 |
BN8 |
|
40 |
BN16 |
|
41 |
ВА1 |
|
42 |
BG (R) |
|
43 |
BD (R) |
|
44 |
BQ (R) |
|
45 |
BZ (R) |
|
46 |
ВТА (R) |
|
47 |
BV6 (R) |
|
48 |
BV7 (R) |
|
49 |
ВХ (R) |
|
50 |
BCR5 (R) |
|
51 |
BCR6 (R) |
|
52 |
BCR7 (R) |
|
53 |
BF1 (R) |
|
54 |
BF2 (R) |
|
55 |
BF4 (R) |
|
56 |
BF8 (R) |
|
57 |
BF16 (R) |
|
58 |
ВТВ3 |
|
59 |
BG |
|
60 |
BD |
|
61 |
BQ |
|
62 |
BZ |
|
63 |
ВТА |
|
64 |
BV6 |
|
65 |
BV7 |
|
66 |
BX |
|
67 |
BCR5 |
|
68 |
BCR6 |
|
69 |
BCR7 |
|
70 |
BF1 |
|
71 |
BF2 |
|
72 |
BF4 |
|
73 |
BF8 |
|
74 |
BF16 |
|
75 |
BSC (R) |
|
76 |
BRW1 (R) |
|
77 |
BRW2 (R) |
|
78 |
BRW3 (R) |
|
79 |
BRW4 (R) |
|
80 |
BRW5 (R) |
|
81 |
BRW6 (R) |
|
82 |
BRW7 (R) |
|
83 |
BRW8 (R) |
|
84 |
BRW9 (R) |
|
85 |
BRW10 (R) |
|
86 |
BRW11 (R) |
|
87 |
BRW12 (R) |
|
88 |
BRW13 (R) |
|
89 |
BRW14 (R) |
|
90 |
BRW15 (R) |
|
91 |
BRW16 (R) |
|
92 |
ВТВ4 (R) |
|
93 |
BRW1 |
|
94 |
BRW2 |
|
95 |
BRW3 |
|
96 |
BRW4 |
|
97 |
BRW5 |
|
98 |
BRW6 |
|
99 |
BRW7 |
|
100 |
BRW8 |
|
101 |
ВТВ6 (R) |
|
102 |
ВТВ5 (R) |
|
103 |
BRW9 |
|
104 |
BRW10 |
|
105 |
BRW11 |
|
106 |
BRW12 |
|
107 |
BRW13 |
|
108 |
BRW14 |
|
109 |
BRW15 |
|
110 |
BRW16 |
|
111 |
BSC |
|
112 |
BRW17 |
|
113 |
BRW17 (R) |
|
114 |
BRW18 |
|
115 |
BRW18 (R) |
|
116 |
BRW19 |
|
117 |
BRW19 (R) |
|
118 |
BRW20 |
|
119 |
BRW20 (R) |
|
120 |
ВТВ6 |
|
121 |
ВТВ7 |
|
122 |
ВТВ7 (R) |
|
123 |
ВТВ5 |
|
124 |
BRW21 |
|
125 |
BRW21 (R) |
|
126 |
BRW22 |
|
127 |
BRW22 (R) |
|
128 |
BRW23 |
|
129 |
BRW23 (R) |
|
130 |
BRW24 |
|
131 |
BRW24 (R) |
|
132 |
ВТВ4 |
Примечание - BRW1 (R) является шиной возврата, соответствующей шине BRW1.
Две неплавающие розетки должны быть установлены на передней панели каждого крейт-контроллера, их контакты должны быть соединены таким образом, чтобы обеспечить непрерывность связи линий MB через крейт-контроллер. Имеет большое значение правильная ориентация этих розеток. Контакт 1 должен находиться вверху у верхней розетки и внизу у нижней розетки (см. черт. 5).
Драйверы должны быть снабжены по меньшей мере одной неплавающей розеткой. Если они не имеют согласующих нагрузок для шин (см. 7.3), то они должны быть оснащены двумя розетками.
Дополнительные соединители могут быть установлены на драйверах и крейт-контроллерах, если это не запрещено (например в случае крейт-контроллера типа А1).
6.1 Соединение с экраном кабеля магистрали ветви
Контакты BSC и BSC (R) могут использоваться для подсоединения к экранам проводов порта (если они есть), а также к экрану кабеля MB. Эти два контакта обычно включены параллельно и не используются для сигналов MB.
В устройствах согласования магистрали ветви (см. 7.3) контакты BSC и BSC (R) должны быть заземлены. Во всех других устройствах должна быть предусмотрена возможность заземления этих контактов.
7 ТРЕБОВАНИЯ К СИГНАЛАМ В ПОРТАХ МАГИСТРАЛИ ВЕТВИ
Параметры входных и выходных сигналов в портах всех устройств, подключенных в MB, должны соответствовать значениям, представленным в табл. 8.
Таблица 8 - Нормы и сигналы в портах MB
|
Логическое состояние |
Абсолютные пределы |
Рекомендуемые значения |
|
|
Входы |
|||
|
а) Напряжение на входе блока |
0 |
От +2,4 до +5,5 В |
|
|
1 |
От 0 до +1,2 В (1) |
- |
|
|
б) Максимальный входной ток: |
± 0,3 мА* (2) |
||
|
втекающий (+) |
0 |
± 0,3 мА |
|
|
вытекающий ( - ) |
1 |
+ 1,6 мА (± 0,3 мА для крейт-контроллера типа А1) |
|
|
Выходы |
|||
|
в) Напряжение на выходе блока |
1 |
От 0 до + 0,5 В |
От 0 до + 0,3 В |
|
г) Минимальная токовая способность (3) |
1 |
127 мА |
133 мА |
|
Окончательная нагрузка |
|||
|
д) Выходное напряжение в разомкнутой цепи |
0 |
+ 4,5 В макс. |
+ 4,1 В предпочтительно* |
|
е) Ток короткого замыкания |
1 |
50 мА макс. |
|
|
ж) Импеданс |
100 Ом предпочтительно* |
||
|
Канал стойки |
|||
|
з) Характеристический импеданс |
70 Ом мин. |
100 Ом макс.* |
Примечания
1 Напряжения, превышающие TTL, обеспечивают более высокую помехоустойчивость с учетом линейных потерь и отражений, вызываемых рассогласованием.
2 Более слабые входные токи дают меньше отражения. Приемники с высоким входным импедансом могут передавать ток в шину или «отводить» ток шины.
3 Возможность отвода тока дается уравнением
![]()
где V0 = 4,5 В - максимальное напряжение при разомкнутой цепи;
![]()
Z = 70 Ом - минимальный характеристический импеданс;
VЕ = 1,6 мА - максимальный входной ток для нижнего уровня напряжения ТТ;
4 Рекомендуемые значения, отмеченные знаком «*», относятся к ряду расчетных значений предпочтительной схемы согласования.
Кроме того, в табл. 8 представлены рекомендуемые значения для некоторых входных и выходных параметров. Значение, рекомендуемое для входного тока в более узком диапазоне, чем номинальное значение, обуславливает группу практических значений для рекомендуемой согласующей цепи.
Требования к сигналам предполагают, что MB обеспечивает в каждом порту условия витой пары проводов с характеристическим импедансом, равным или больше 70 Ом (см. примечание к табл. 8).
Вставной блок рассматривается относительно отдельной шины или как вход (принимаемый сигнал MB), или как выход (генерирующий сигналы в MB), или как согласующее устройство (переводящее сигнальные шины в состояние «0» и приводящие их в соответствие с характеристическим импедансом). В некоторых случаях блок может выполнять несколько функций из числа указанных.
Например, шины BRW соединены со входами и выходами крейт-контроллеров и драйверов и могут быть соединены с нагрузочными согласующими цепями драйверов. Подобные устройства должны удовлетворять условиям табл. 8, которые соответствуют любой ситуации на MB.
Любая емкостная нагрузка в сигнальных шинах для нормального функционирования выходов или нагрузка для частичного интегрирования сигнала на входах (см. 4.3, 4.4.1 и А.7) должны иметь импеданс выше по сравнению с характеристическим импедансом MB и должны учитывать время нарастания сигналов на MB.
7.1 Входы
Все входы, на которые поступают сигналы из портов, должны принимать уровни напряжения (приведены в подпункте а табл. 8) и не должны создавать ток нагрузки, значение которого выше значений, указанных в подпункте б табл. 8.
Указанные входные токи нагрузки относятся к полному току, передаваемому блоком в каждую сигнальную шину в порте MB. Блок принимает сигналы шины, включающие воздействие всех выходных схем, соединенных с этой же шиной. Максимально с каждой шиной может быть соединено восемь модулей (крейтов).
Абсолютное значение тока нагрузки соответствует классическим схемам ТТЛ, но для всех блоков рекомендуется меньшее значение и это является обязательным для крейт-контроллера типа А1 (см. A.3).
7.2 Выходы
Все выходы, передающие сигналы через порты MB, должны быть источниками электрических сигналов, позволяющими реализовать функции «монтажная ИЛИ».
В состоянии «1» эти источники должны передавать сигналы, напряжение которых лежит в диапазоне, указанном в подпункте в табл. 8, и должны быть рассчитаны на ток, согласно подпункту г табл. 8, чтобы нормально взаимодействовать в динамическом режиме с восемью входами (см. 7.1) и двумя оконечными согласующими нагрузками (см. 7.3). Сигналы BD, ВТА и ВТВ должны передаваться источниками, которые обеспечивают требуемое время нарастания (см. 4.3 и 4.4.1). Кроме того, разрешено генерирование других сигналов с заданным временем нарастания.
Если драйвер включает одну цепь согласования, его нагрузочные возможности по току как порта могут быть соответственно уменьшены.
7.3 Оконечные согласующие нагрузки
Все 65 сигнальных шин должны заканчиваться на конце магистрали ветви схемой, которая передает в каждую шину ток, соответствующий по значению и направлению состоянию «0», и обеспечивает соответствующий импеданс согласования для ограничения отражений. Все шины возврата тока и экраны кабеля должны заземляться в этой точке. Ток, переданный при напряжении логической «1» в шину MB схемой согласования шины, не должен превышать ток короткого замыкания (см. подпункт е табл. 8).
Рекомендуется на все 65 сигнальных шин иметь две оконечные нагрузки MB. Предлагается реализовать нагрузку, используемую на каждом из концов MB, подсоединением ее к второму соединителю последнего крейт-контроллера или к второму соединителю драйвера, если он не имеет внутренних цепей согласования и расположен на конце магистрали ветви.
Если подобная оконечная нагрузка имеет место, она должна приводить к требуемому согласованию 65 сигнальных шин и заземлению шин возврата тока и экрана кабеля.
Если все входы, соединенные с MB, обуславливают номинальный ток нагрузки (см. подпункт б табл. 8) и характеристический импеданс лежит в диапазоне от 70 до 100 Ом, рекомендуется предусмотреть схемы окончательных нагрузок, имеющие характеристики, которые указаны в подпунктах д и ж табл. 8, для получения оптимального быстродействия и помехоустойчивости. Если входы обуславливают максимальный ток нагрузки, необходимо предусмотреть схемы оконечных нагрузок, реализующие оптимальный вариант между быстродействием и помехоустойчивостью для конкретного рассматриваемого случая.
7.4 Условия при отключении питания
Крейт-контроллер не должен генерировать сигналы в состоянии «1» в портах MB, если он находится в автономном режиме работы и нормально обеспечивается питанием.
Рекомендуется, чтобы крейт-контроллер, работающий в автономном режиме при прерывании подачи питания, не мог воздействовать на функционирование MB. Это относится ко всем входным и выходным схемам, соединенным с портами для того, чтобы иметь возможность прерывания питания (например при техническом обслуживании и замене модулей), не нарушая работы всей системы.
ПРИЛОЖЕНИЕ А
ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ КРЕЙТ-КОНТРОЛЛЕРА КАМАК ТИПА А1
А.1 Крейт-контроллер КАМАК типа А1
Чтобы соответствовать спецификациям крейт-контроллера КАМАК типа А1, крейт-контроллер должен включать все обязательные устройства, определенные в этом приложении. Он не должен включать других устройств, которые могут отрицательно сказаться на взаимозаменяемости крейт-контроллера другим крейт-контроллером типа А1 как с точки зрения электроники, так и с точки зрения программирования. Он должен быть полностью взаимозаменяемым крейт-контроллером, имеющим структуру, как указано на черт. 7, хотя он не обязательно должен иметь идентичную структуру, внутренние сигналы (указанные без приставки В на черт. 7) или логические операторы.
А.2 Другие типы крейт-контроллеров
Рекомендуется, чтобы другие типы крейт-контроллеров были взаимозаменяемыми с крейт-контроллером типа А1 в том, что касается устройств, входящих в состав обоих крейтов, но не обязательно, чтобы другие типы крейт-контроллеров имели все устройства крейт-контроллера типа А1, они могут включать также другие устройства.
Крейт-контроллер должен удовлетворять всем обязательным спецификациям ГОСТ 27080 и спецификациям, определяющим MB КАМАК (см. 1 - 7 настоящего стандарта). Необходимо, чтобы входные соединения на уровне портов крейт-контроллеров типа А1 и MB отвечали спецификациям для минимального входного типа тока (± 0,3 мА), представленным в табл. 8.
Крейт-контроллер не должен занимать более трех станций в крейте. Рекомендуется, чтобы он занимал две станции, соединенные с МК, управляющую и смежную нормальную станции.
Кроме двух соединителей, расположенных на передней панели и предназначенных для соединения с магистралью ветви (см. А.4), крейт-контроллер должен иметь соединитель на задней панели для обеспечения связи с дополнительным блоком заявок (см. А.9).
На передней панели крейт-контроллера должны монтироваться все перечисленные ниже устройства и не должно быть никакого другого устройства, которое может сказаться на взаимозаменяемости. Разрешено добавление сигнальных указателей для контроля:
а) два соединителя для соединения с магистралью ветви (как указано в п. 6), ориентированных, согласно принятому направлению, с соответствующим подсоединением контактов;
б) средство индикации выбранного адреса крейта (пп. 1 - 7). Не должно быть свободного доступа для изменения адреса крейта со стороны передней панели;
в) средства для переключения системного и автономного режимов работы крейт-контроллера (см. А.10);
г) коаксиальный соединитель для входа сигнала запрета. Тип соединителя и характеристики сигнала указаны в ГОСТ 27080, пп. 4.2.5 и 7.2.1 соответственно;
д) две кнопки или два эквивалентных устройства управления для выдачи на МК сигналов запуска и возврата в исходное состояние (сброс). Эти устройства являются действующими только в автономном режиме работы и передняя панель или маркировка на ней должны указывать на это.
А.5 Сигналы на магистраль крейта
A.5.1 Сигналы данных
Если крейт-контроллер находится в системном режиме работы и адресован во время команды и чтения, сопровождаемой кодом номера станции, отличного от N (30), он должен передавать в 24 шины BRW сигналы чтения МК через выходные схемы, реализующие внутреннюю функцию ИЛИ.
Крейт-контроллер типа А1 должен иметь вентильные схемы между шинами R и шинами BRW, так, чтобы эта передача данных чтения осуществлялась только в том случае, если контроллер адресован и функционирует в системном режиме работы, например, если BCRi (BTA + BTBi) = 1. Во время операции записи, сопровождаемой кодом номера станции, отличным от N (30), он должен осуществить повторную передачу сигналов записи на МК с 24 шин BRW.
Рекомендуется снабдить все крейт-контроллеры вентильными схемами между шинами R и BRW и шинами BRW и W так, чтобы передачи данных были эффективными, только если крейт-контроллер адресован и работает в системном режиме. Эти схемы могут, кроме того, обуславливать соответственно эти передачи только в операции чтения (BF16 × BF8 ≠ 1). Крейт-контроллер может передавать сигналы записи МК во время какой-либо операции, но другие вставные блоки, соединенные с МК, могут рассчитывать на наличие этих сигналов только во время операций записи на магистрали крейта.

А.5.2 Сигналы во время команды
Рекомендуется, чтобы сигналы команды BN, ВА и BF, передаваемые по MB, были отсортированы в крейт-контроллере, например, посредством интегрирования или фиксации в момент перехода ВТА 0 → 1 для того, чтобы защитить соответствующие шины МК от воздействий переходных процессов на MB.
Сигналы субадреса и функции шин на ВА и BF должны передаваться крейт-контроллером в шины А и FKC во время всех операций в режиме приема команд, если крейт-контроллер адресован и работает в системном режиме.
В крейт-контроллере двойной ширины каждый код номера станции N (1) - N (3) должен декодироваться для формирования сигнала в соответствующую шину МК N1 - N23.
Операции команды, включающие код N (26), должны начинаться с генерирования сигналов во все шины МК N1 - N23. Операции команды, включающие код N (24), должны начинать генерирование сигналов в шины N1 - N23 соответственно содержимому регистра номеров станций (23 разряда) (SNR). Загрузка этого регистра осуществляется из шин BRW1 - BRW23 при помощи команды N (30).A (8).F (16). Разряд, загруженный BRW1, контролирует состояние N1 и т.д. Регистр не сбрасывается сигналом пуска в МК (Z).
Крейт-контроллер тройной ширины может иметь соответственно 22-разрядный регистр SNR, декодировать N (1) - N (22) и генерировать сигналы в шины N1 - N22.
А.5.3 Сигналы общего управления
Сигнал пуска МК (Z) должен генерироваться в ответ на команды N (28).A (8).F (26) и в ответ на сигнал пуска MB (см. п. 4.4.1). Он должен также генерироваться в ответ на ручную команду Пуск, но только при работе крейт-контроллера в отключенном режиме.
Сигнал сброса МК в исходное состояние (С) должен генерироваться в ответ на команду N (28).А (9).F (26). Он должен также генерироваться в ответ на ручную команду установки Сброс, но только при работе крейт-контроллера в автономном режиме.
Сигналы пуска (Z) и сброса (С) должны генерироваться согласно временнóй диаграмме (черт. 9 ГОСТ 27080). Они должны сопровождаться сигналами В и S2, синхронизированными согласно черт. 9 ГОСТ 27080. Временная диаграмма может включать сигнал S1, но не обязательно; вставные блоки, соединенные с МК, не обязательно должны иметь сигнал S1 для сопровождения сигнала Z и С.
Сигнал запрета на МК (1) должен генерироваться в то время, когда подключенный крейт-контроллер генерирует сигнал пуска на МК (Z) и достигать состояния «1» самое позднее в момент t3 (черт. 9 ГОСТ 27080). Если другие блоки генерируют сигнал пуска (сопровождаемый запретом), подключенный крейт-контроллер должен генерировать сигнал запрета в ответ на команду N (30).A (9).F (26). Во всех этих случаях сигнал запрета должен поддерживаться крейт-контроллером до сброса командой N (30).A (9).F (24). Он должен также генерироваться при наличии запрета с передней панели.
Команда N (30).A (9).F (27) должна формировать ответ Q = 1, когда шина запрета МК находится в состоянии «1».
А.5.4 Дополнительные контакты
Крейт-контроллер типа А1 не должен использовать дополнительные контакты соединителя МК станций, которые он занимает.
А.6 Передача запросов
А.6.1 Запрос на магистрали ветви
Сигнал запроса на MB (BD) с учетом следующих ниже условий должен быть результатом комбинации ИЛИ внешнего сигнала запроса, поступающего от контакта 48 разъема вставного модуля сортировки заявок LAM и внутреннего сигнала запроса, являющегося в свою очередь результатом комбинации ИЛИ 24 GL-сигналов полученных через соединитель блока сортировки LAM-заявок.
Генерирование сигнала запроса MB в шину BD должно блокироваться командой N (30).A (10).F (24) или сигналом (Z) МК, сопровождаемым сигналом S2. Оно должно разблокироваться командой N (30).А (10).F (26) Команда N (30).A (10).F (27) должна вызывать ответ BQ = 1, если генерирование запроса MB разблокировано. Команда N (30). A (11).F (27) должна вызывать ответ BQ = 1, если комбинация ИЛИ внутреннего и внешнего запросов находится в состоянии «1», даже если генерирование запроса блокируется.
Сигнал внутреннего запроса должен запрещаться, если внутренний сигнал запрета D, полученный от контакта 51 соединителя модуля сортировки заявок, находится в состоянии «1».
А.6.2 Сортировка заявок (GL)
В ответ на запрос чтения отсортированных заявок (BG = 1), сопровождаемый сигналом BCRi, крейт-контроллер должен генерировать сигнал операции GL на контакт I соединителя вставного модуля сортировки заявок. Он должен принимать сигналы GL1 - GL24 от соединителя модуля сортировки заявок и передавать их в шины (GL1 в BR1 и т.д.). Крейт-контроллер должен также принимать сигналы GL от соединителя модуля сортировки заявок и передавать их в шины BRW в ответ на операции в командном режиме, включающие команду N (30).А (0 - 7).F (0) (см. п. А.9.4).
В обоих случаях информация GL должна быть передана от соединителя модуля сортировки заявок в шину BRW с возможно меньшей задержкой, и сигналы не должны появляться в шинах чтения (R) КК.
А.6.3 Подключение к источнику тока смещения шин GL и L
Источники тока смещения (см. табл. 6 ГОСТ 27080) должны быть подключены ко всем шинам GL в крейт-контроллере и не должны подключаться к шинам L, что позволяет реализовать обработку заявок путем комбинирования сигналов L в схемах ИЛИ.
А.7 Требование к синхронизации
Во время операций в режиме приема команд, сопровождаемых командами номеров станции, отличных от N (30), крейт-контроллер генерирует сигналы стробирования S1 и S2 на МК согласно временной диаграммы, связанной с временнóй диаграммой сигналов ВТА и ВТВ ветви, как указано в А.7.1.
Во время операции в командном режиме, сопровождаемой кодом номера станции N (30), сигналы S1, S2 или сигнал занятости В не генерируется в шины МК (см. А.7.3).
При операциях в режиме GL сигналы стробирования S1 и S2 и занятости В не генерируются, и временная диаграмма должна учитывать задержки, вызываемые соединениями с блоком сортировки внешних заявок МК. Эти требования определены в А.7.2 и А.9.3.
Внутренний синхронизирующий генератор крейт-контроллера должен быть защищен от помех в шинах ВТА и BCR.
Метод защиты (см. черт. 7) заключается в корректировке сигналов, поступающих из шин ВТА и BCR, выбранных посредством интегрирования при постоянной времени (100 ± 50) нс. Другой метод заключается в формировании внутреннего сигнала (ТА) для управления синхронизирующим генератором. Переход сигналов ВТА и ВСR регистрируется крейт-контроллером после задержки, вызываемой схемой защиты от помех (см. черт. 3 и 4).
А7.1. Операции во время приема команд при наличии S1, S2 и В на МК
Следующая временная диаграмма должна соблюдаться при ответе крейт-контроллером на прием команды MB, которая требует выполнения операции на МК, сопровождаемой сигналами S1, S2 и В. В настоящем разделе моменты t0, t3, t5 и т.д. обозначают соответствующие точки временнóй диаграммы (черт. 9 ГОСТ 27080).
Во время фазы 2 после операций драйвера в течение фазы 1 крейт-контроллер регистрирует сигнал ВТА = 1, сопровождаемый сигналами BG = 0, BCRi = 1 и соответствующими сигналами команды. Он должен генерировать сигналы N и В, начинающими операцию на МК в момент t0.
В момент t3, который наступает через (400+200-0) нс после момента t0, крейт-контроллер начинает переход 0 → 1 сигнала стробирования S1 и переход 1 → 0 сигнала BTBi во временнόй диаграмме MB. В момент t5, наступающий через (200+100-0) нс после момента t3 должен начинаться переход 1 → 0 сигнала стробирования S1.
Во время фазы 4 крейт-контроллер начинает переход 0 → 1 сигнала стробирования S2 в момент t6, в который он регистрирует ВТА = 0 или в который интервал t5 - t6 достигает (100+100-0) нс, если этот момент является более поздним.
В момент t8, который следует через (200+100-0) нс после момента t6, должен начинаться переход 1 → 0 сигнала S2.
В момент t9, который следует через (100+100-0) нс после t8, крейт-контроллер должен начать переход 1 → 0 сигналов N и ВКК и должен отключить шины Q и RKK от мин BQ и BRW КС. Затем крейт-контроллер должен начать переход 0 → 1 сигнала BTBi.
А.7.2 Операции в режиме GL
Крейт-контроллер должен соблюдать следующую временную диаграмму при операции GL, когда ВG = 1 и BCRi = 1. Во время фазы 2 он должен начинать переход 1 → 0 сигнала MB и BTBi менее чем через (400+200-0) нс после регистрации сигнала ВТА = 1. Одновременно он должен передавать на выход BRW информацию GL, которую он получает от блока сортировки заявок (см. А.9.3). Во время фазы 4 крейт-контроллер должен снять информацию GL на выходах BRW при нормальной задержке после регистрации сигнала ВТА = 0 и начинать переход 0 → 1 сигнала BTBi.
А.7.3 Операции во время приема команд без сигналов S1, S2 и В на магистрали крейта
Командные операции с кодом номера станции N (30) имеют отношение к внутренним устройствам крейт-контроллера и чтению информации GL, полученной через соединитель блока сортировки заявок. Крейт-контроллер не должен генерировать сигналы S1, S2, В или R на магистрали крейта.
Временная диаграмма этих операций должна отвечать тем же требованиям, которые предъявляются к операциям в командном режиме (см. А.7.1), с той разницей, что сигналы S1, S2 и В не передаются в шины МК, хотя внутренние эквивалентные сигналы могут иметь место.
А.8 Команды, выполняемые крейт-контроллером типа А1
Крейт-контроллер типа А1 должен распознавать и выполнять команды, представленные в табл. 9, и не должен использовать другие команды. Он должен генерировать сигнал ВХ = 1, если он адресован одной из этих команд. Пять кодов функции F (0, 16, 24, 26, 27) должны полностью дешифроваться в крейт-контроллере.
Крейт-контроллер должен генерировать сигнал BQ = 1 в ответ на любую команду чтения или записи в его регистрах или блоке сортировки заявок. В крейт-контроллере типа А1 двумя командами, к которым это относится, являются: N (30).А (0 - 7).F (0) и N (30).А (8).F (16).
Таблица 9 - Команды, выполняемые крейт-контроллером КАМАК типа А1
|
Команда |
Ответ |
|||
|
N |
А |
F |
||
|
Генерирует Z на МК |
28 |
8 |
26 |
BQ = 0 |
|
Генерирует С на МК |
28 |
9 |
26 |
BQ = 0 |
|
Читает GL |
30 |
0 - 7 |
0 |
BQ = 1 |
|
Загружает SNR |
30 |
8 |
16 |
BQ = 1 |
|
Сброс I с МК |
30 |
9 |
24 |
BQ = 0 |
|
Устанавливает I на МК |
30 |
9 |
26 |
BQ = 0 |
|
Проверка наличия I |
30 |
9 |
27 |
BQ = 1, если I = 1 |
|
Закрывает выход ВД |
30 |
10 |
24 |
BQ = 0 |
|
Отпирает выход ВД |
30 |
10 |
26 |
BQ = 0 |
|
Проверяет открыт ли выход |
30 |
10 |
27 |
BQ = 1, если ВД открыт |
|
Контролирует наличие запросов |
30 |
11 |
27 |
BQ = 1, если имеются запросы |
А.9 Соединитель модуля сортировки заявок LAM
Задний соединитель, предназначенный для возможной связи с отдельным модулем сортировки заявок, должен быть двойной плотности с 52-штырьковыми контактами неплавающего исполнения. В документе EUR4600e приводится в качестве примера соединитель, удовлетворяющий этим требованиям. Этот соединитель должен монтироваться с задней стороны крейт-контроллера над соединителем МК в пространстве, свободном для доступа (см. черт. 3 ГОСТ 27080), контакт I должен находиться внизу. 52 контакта определены согласно табл. 10.
Таблица 10 - Назначение контактов заднего соединителя крейт-контроллера A1
|
Назначение |
Номер контакта |
Назначение |
|
|
1 |
Сигнал «Обработка требований» |
2 |
L1 |
|
3 |
GL1 |
4 |
L2 |
|
5 |
GL2 |
6 |
L3 |
|
7 |
GL3 |
8 |
L4 |
|
9 |
GL4 |
10 |
L5 |
|
11 |
GL5 |
12 |
L6 |
|
13 |
GL6 |
14 |
L7 |
|
15 |
GL7 |
16 |
L8 |
|
17 |
GL8 |
18 |
L9 |
|
19 |
GL9 |
20 |
L10 |
|
21 |
GL10 |
22 |
L11 |
|
23 |
GL11 |
24 |
L12 |
|
25 |
GL12 |
26 |
L13 |
|
27 |
GL13 |
28 |
L14 |
|
29 |
GL14 |
30 |
L15 |
|
31 |
GL15 |
32 |
L16 |
|
33 |
GL16 |
34 |
L17 |
|
35 |
GL17 |
38 |
L19 |
|
37 |
GL18 |
40 |
L20 |
|
39 |
GL19 |
42 |
L21 |
|
41 |
GL20 |
44 |
L22 |
|
43 |
GL21 |
46 |
L23 |
|
45 |
GL22 |
48 |
Сигнал «Внешний» |
|
47 |
GL23 |
50 |
Контроллер адресован |
|
49 |
GL24 |
52 |
0 В |
|
51 |
Сигнал «Запрет внутреннего D» |
Модуль сортировки заявок LAM получает сигналы L от крейт-контроллера через соединитель этого модуля. Он генерирует сигналы (GL) и, возможно, внешний сигнал запроса. Он может содержать вентильные схемы, регистры маски и т.д. для обработки сигналов L или может использовать только пассивные внутренние соединения между контактами соединителя модуля сортировки заявок. Он может взаимодействовать с крейт-контроллером различным образом:
а) запрос в MB: крейт-контроллер типа А1 генерирует сигнал запроса на MB (BD) на основании сигналов GL (и, возможно, внешний сигнал D), которые он получает через соединитель модуля сортировки L-сигналов;
б) операция GL: крейт-контроллер передает сигнал наличия операции GL на контакт I для того, чтобы сообщить, что он запрашивает сигналы GL.
Если модуль сортировки заявок отвечает на этот сигнал, он должен отвечать требованиям синхронизации, изложенным в п. А.9.3, согласно временной диаграмме;
в) операция в режиме приема команд: в ответ на команды, содержащие N (28) или N (30), крейт-контроллер передает на контакт 50 сигнал «Контроллер адресован». Это позволяет считать модуль сортировки заявок отдельной частью крейт-контроллера, который может быть адресован независимо от положения в крейте. Наличие сигнала «Занят» (В) на МК отличает операции с N (28) от операций с N (30). Сигнал «Контроллер адресован» с А (0 - 7) КК, но без сигнала В указывает, что крейт-контроллер запрашивает сигнал GL. Сигнал «Контроллер адресован», используемый одновременно с операцией на МК и сигналом В, позволяет, например, получить доступ к регистрам модуля сортировки заявок.
Если модуль сортировки заявок отвечает на сигнал «Контроллер адресован», он должен отвечать требованиям синхронизации, изложенным в А.9.4.
Сигнал операции GL на контакте 1 должен быть в логическом состоянии «1» в то время, когда крейт-контроллер работает в системном режиме и (ВТА + BTBi) BG BCRi = 1.
Сигнал «Контроллер адресован» на контакте 50 должен быть в логическом состоянии «1», когда при операции в командном режиме происходит адресация к N (28) или N (30), если крейт-контроллер работает в системном режиме и [(28) + N (30)] ´ (BTA + BTBi) × BG × BCRi = 1.
Эквивалентные условия генерирования обоих сигналов «Контроллер адресован» и операция GL (черт. 7) в зависимости от внутренних сигналов (необязательных) в крейт-контроллере типа А1.
Все требования к временным соотношениям относятся к сигналам LAM на уровне соединителя крейт-контроллера. При этом интервал между генерированием сигнала крейт-контроллера и приемом ответа внешнего модуля включает задержки, вызываемые одновременно внешним модулем и кабелем связи.
А.9.1 Требования к сигналам
Все сигналы, передаваемые через соединитель модуля сортировки и заявок (LAM), должны отвечать требованиям, изложенным в 7.1 ГОСТ 27080.
Требования, относящиеся к сигналам N, применяются к сигналу GL на контакте 1 и сигналу «Контроллер адресован» на контакте 50. Все другие сигналы, включая внешний сигнал запроса (D) на контакте 48 и внутренний сигнал запрета запроса D на контакте 51, должны соответствовать требованиям, относящимся к сигналам L-заявок.
А.9.2 Синхронизация - запрос магистрали ветви
Максимальное запаздывание между моментом, в который L сигнал в крейт-контроллере, занимающем управляющую станцию крейта, достигает и остается в состоянии «1» или «0», и моментом, в который сигнал BD у порта того же крейт-контроллера достигает состояния «1» или «0» соответственно, определено в 4.4.1. Когда крейт-контроллер используется с внешним модулем сортировки заявок, запаздывание, вызываемое крейт-контроллером, не должно превышать 250 нс.
А.9.3 Синхронизация - операции CL
Интервал между генерированием сигнала наличия операции GL, сопровождаемого сигналами L, и установлением соответствующих сигналов GL не должен превышать 350 нс.
А.9.4 Синхронизация - операции при командах
Интервал между генерированием сигнала «Контроллер адресован», сопровождаемого L-сигналами совместно с сигналами F (0), А (0 - 7) и В = 0 на МК, и установлением соответствующих CL-сигналов не должен превышать 350 нс.
Внешний модуль сортировки должен представлять ту же информацию GL в ответ на сигнал GL, что и на сигнал «Контроллер адресован», сопровождаемый сигналами А (0), F (0) и В = 0. Субадресы А (1 - 7) могут использоваться для получения доступа к различной информации GL.
Если внешний модуль сортировки отвечает на операцию в командном режиме с N (28).А (0 - 15), В = 1 и произвольным кодом функции F, он должен удовлетворять стандартным требованиям по временным соотношениям, предъявляемым к блоку КАМАК, и ему разрешено выполнять передачи данных через шины R и W на МК.
Режим отключения от магистрали устанавливается при помощи ручного переключателя, расположенного на передней панели крейт-контроллера. При работе в этом режиме крейт-контроллер не отвечает ни на какую команду или запрос на чтение заявок GL от MB и не генерирует сигналов обращения или запроса на MB.
Следующие минимальные условия должны выполняться при работе в отключенном режиме:
а) ручные переключатели ПУСК и СБРОС на передней панели должны быть действующими (в системном режиме работы они должны быть недействующими);
б) вход сигнала запрета передней панели должен оставаться действующим. Сигнал запрета (I) должен генерироваться на МК только в ответ на вход сигнала запрета передней панели;
в) крейт-контроллер не должен реагировать ВТА = 1. Он не должен генерировать сигналы В, N, S1 или S2 в МК в ответ на сигналы ВТА = 1, BG = 0 и получать доступ к информации GL в ответ на сигналы ВТА = 1 и BG = 1;
г) крейт-контроллер не должен генерировать состояния «1» в шины ВТВ, BD, BRW, BQ и ВХ. Крейт, работающий в отключенном режиме, не может влиять на операции на MB;
д) крейт-контроллер не должен отвечать на сигнал BZ = 1.
Следующие дополнительные условия рекомендуется выполнять при работе в отключенном режиме:
е) если имеются вентильные схемы между шинами MB и шинами МК W, N, А и F, рекомендуется, чтобы они пользовались для отключения крейт-контроллера. Операции на MB не смогут таким образом влиять на крейт, работающий в отключенном режиме;
ж) при отключении питания крейт-контроллера рекомендуется, чтобы все входы и выходы через его порты MB могли бы принять состояние «0» или «1» соответственно функционированию других модулей, соединенных с MB, и чтобы эти входы или выходы не создавали запрещенные токи нагрузки;
з) рекомендуется, чтобы любое дополнительное средство генерирования команд в крейте, работающем в отключенном режиме, соответствовало требованиям 5.5.2 ГОСТ 27080 при генерировании I = 1 в ответ на Z, S2. Оно должно, по возможности, удерживать I = 1 и иметь средства установки его на 0.
Ключевые слова: система КАМАК, системы многокрейтовые, магистраль ветви, крейт-контроллер, приборостроение ядерное, блоки электронные, прием сигналов, преобразование сигналов, обработка данных цифровая, устройство автоматическое, обработка данных
СОДЕРЖАНИЕ