
ГОСУДАРСТВЕННЫЙ СТАНДАРТ СОЮЗА ССР
ОБОРУДОВАНИЕ ЭЛЕКТРОТЕХНИЧЕСКОЕ
АППАРАТЫ ЭЛЕКТРИЧЕСКИЕ
НАПРАВЛЕНИЕ ДВИЖЕНИЯ ОРГАНОВ УПРАВЛЕНИЯ
ГОСТ 21991-89
(МЭК 447-74, СТ СЭВ 6464-88)
ГОСУДАРСТВЕННЫЙ КОМИТЕТ СССР ПО УПРАВЛЕНИЮ
КАЧЕСТВОМ ПРОДУКЦИИ И СТАНДАРТАМ
Москва
ГОСУДАРСТВЕННЫЙ СТАНДАРТ СОЮЗА ССР
|
Оборудование электротехническое АППАРАТЫ ЭЛЕКТРИЧЕСКИЕ Направление движения органов управления Electrotechnical equipment. Standard directions of movement for actuators which control the operation of electrical apparatus |
ГОСТ (МЭК 447-74, |
Срок действия с 01.07.90
до 01.07.95
1. ВВЕДЕНИЕ
Настоящий стандарт устанавливает связь между направлением воздействия руки оператора на орган управления электрическим аппаратом и результирующим действием, вызываемым этим воздействием, что особенно важно для безопасности, когда ошибочно произведенное движение может создать опасную ситуацию или когда необходимы частые либо быстрые действия оператора (например, для кранов, вагонеток и других средств доставки, и, в особенности, для устройств, обычно используемых потребителем).
Установлено, что стандартные направления движения не могут быть строго соблюдены при всех обстоятельствах. Следовательно, в исключительных случаях допускаются отклонения от требований настоящего стандарта.
2. ОБЛАСТЬ РАСПРОСТРАНЕНИЯ
Настоящий стандарт распространяется на ручные органы управления (маховики, рукоятки, ручки, вращающиеся кнопки, рычаги, нажимные кнопки, скобы, шнуры и т.д.) электрическими аппаратами (регулируемыми резисторами, контроллерами, выключателями нагрузки и др.). Электрические аппараты, управляемые таким образом, могут представлять собой самостоятельную функциональную единицу или быть составной частью более крупного агрегата электрического или неэлектрического оборудования, например, двигателя, электропневматических клапанов и сервосистем.
Для органов управления, кроме ручных, например, для педалей, при необходимости, могут быть установлены дополнительные правила.
3. ЦЕЛЬ
Цель настоящего стандарта - дать возможность оператору предвидеть направление действия, являющегося результатом воздействия в данном направлении на орган управления.
4. ОСНОВНЫЕ ПОЛОЖЕНИЯ
Воздействия на органы управления и соответствующие результирующие действия классифицируют на две группы: 1 и 2. Связь между группами такова, что, если результирующим действием является перемещение, то рука оператора, насколько это возможно, движется в направлении перемещения.
4.1. Воздействие
Два противоположных воздействия могут быть достигнуты использованием:
1) одного органа управления с двумя рабочими направлениями движения (например, маховик);
2) ряда органов управления, каждый из которых имеет только одно рабочее направление движения (например, нажимные кнопки).
В первом случае классификация основана на рабочем направлении движения (см. пп. 1, 2 табл. 1а), во втором - на относительных положениях органов управления (см. пп. 3, 4 табл. 1а).
4.2. Результирующие действия
Результирующие действия (во многих случаях механические действия), являющиеся результатом воздействия на орган управления, классифицируют на две группы противоположных действий (см. табл. 1б).
4.3. Связь между воздействием и результирующим действием
Результирующее действие группы 1 должно вызываться одним из воздействий группы 1, результирующее действие группы 2 - одним из воздействий группы 2.
4.4. Положение «Стоп»
Результирующему действию «Стоп» во многих случаях может соответствовать определенное положение органа управления.
Положение «Стоп» может находиться в конце перемещений органа управления в случаях, когда этот орган управления вызывает результирующие действия группы 1 при движении от положения «Стоп» и группы 2 - при возвращении к нему, или посередине перемещений органа управления в случаях, когда орган управления вызывает противоположные результирующие действия при движении в двух противоположных направлениях от положения «Стоп».
Примеры для размещения трех кнопок
Кнопка «Стоп» в конце ряда
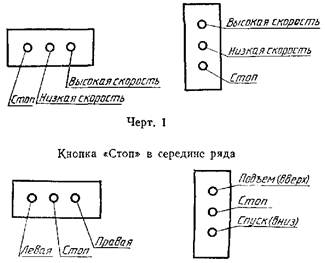
Черт. 2
Для некоторых органов управления (например, для нажимных кнопок) кнопка «Стоп» может быть расположена в конце ряда или посередине его.
4.5. В случае сомнения относительно результирующего действия органа управления (например, если один и тот же орган предусмотрен для более чем одного результирующего действия или имеются несколько аналогичных органов на одном и том же пульте управления), вид каждого из этих результирующих действий должен быть ясно обозначен на каждом органе управления или около него.
5. ТИПЫ ОРГАНОВ УПРАВЛЕНИЯ
В табл. 2 представлены органы управления различных типов.
На каждом чертеже стрелка показывает направление воздействия, классифицированного в группе 1, результирующее действие которого относится к группе 1 в соответствии с табл. 1б.
Предполагается, что направление перемещения органа управления должно быть определено со стороны оператора, находящегося на рабочем месте, взгляд которого направлен на орган управления. На каждом чертеже место оператора соответствует положению номера чертежа.
Если вращающаяся ручка соединена с угловым указателем, ее движение всегда рассматривают как вращение (табл. 2, черт. 1.5).
Движение органа управления от одной из трех основных осей к другой, как показано, например, на черт. 1.3 табл. 2, должно рассматриваться как вращение.
5.2. Движение, практически параллельное одной из основных осей, т.е. одинаково распределяющееся по обе стороны от основной оси, когда суммарное допустимое угловое перемещение незначительно превышает 120°, рассматривают как прямолинейное движение (см. табл. 2, черт. 2.2 - 2.4, 3.2 - 3.4, 4.2 - 4.4).
Примечание. В отдельных обоснованных случаях допустимое угловое перемещение может достигать 170°.
Если угловое перемещение мало (см. табл. 2, черт. 2.1, 3.1, 4.1 и 5.1) или же открыта или видна только часть окружности органа управления, такого как маховик, расположенного частично в оболочке, или ручка, углубленная в пазу (см. табл. 2, черт. 2.5 и 3.5), то считают, что орган управления имеет прямолинейное перемещение.
6. СПЕЦИАЛЬНЫЕ СЛУЧАИ
6.1. «Подъем» и «Спуск» при помощи рычага
Для результирующих действий «подъем» и «спуск», осуществляемых при помощи рычага, для которого движение руки вперед или назад практически горизонтально, рабочее направление движения, противоположное указанному в табл. 1, является обычным и рекомендуется в соответствии с черт. 3.

Черт. 3
Таблица 1
Классификация движений органов управления, соответствующих им результирующих действий и связь между ними
1а) Классификация движений органов управления
|
Вид органа управления |
Характер движения органа управления |
Рабочее направление движения органа управления |
|
|||
|
Группа 1 |
Группа 2 |
|
||||
|
1. Маховик, рукоятка, кнопка и т.п. |
Вращательное (см. п. 5.1) |
По часовой стрелке
|
Против часовой стрелки
|
|
||
|
2. Ручка, рычаг и т.д. с приближенно прямолинейным движением (см. п. 5.2)** |
По вертикали |
Вверх |
Вниз |
|
||
|
По горизонтали |
Вправо - влево |
Вправо
|
Влево
|
|
||
|
Вперед - назад* |
От оператора (нажим)
|
К оператору (вытягивание)
|
|
|||
|
3. Вид ряда органов управления |
Характер движения |
Место воздействия для получения результирующего действия |
|
|||
|
4. Ряд ручек, нажимных кнопок, стержней, шнуров и т.д. с противоположными результирующими действиями |
Один над другим |
Давление, тяга и т.д. |
Воздействие на верхний орган управления |
Воздействие на нижний орган управления |
||
|
Рядом |
Воздействие на правый орган управления
|
Воздействие на левый орган управления
|
||||
|
||||||
* «Подъем» и «спуск» при помощи рычага (см. п. 6.1).
** Нажимные вытягиваемые кнопки (см. п. 6.2).
1б) Классификация результирующих действий
|
Характер результирующего действия |
Результирующее действие |
|
|
Группа 1 |
Группа 2 |
|
|
Изменение физических величин (напряжения, тока, мощности, скорости, частоты, силы света, температуры и т.д.) |
Увеличение |
Уменьшение |
|
Изменение режима работы |
Ввод в эксплуатацию Пуск Ускорение Включение электрической цепи Зажигание |
Вывод из эксплуатации Остановка Торможение Отключение электрической цепи Гашение |
|
Движение машины или ее исполнительных органов относительно основных осей машины или рабочего места |
Вверх* Вправо Вперед (от оператора) |
Вниз* Влево Назад (к оператору) |
* «Подъем» и «спуск» при помощи рычага (см. п. 6.1).
6.2. Кнопки без самовозврата (с механической защелкой)
Направление воздействия на нажимные вытягиваемые кнопки должно рассматриваться относительно поверхности, в которую они вмонтированы:
1) движение от поверхности или вытягивание является воздействием группы 1;
2) движение к поверхности или нажим является воздействием группы 2, как показано на черт. 4.
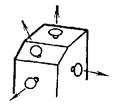
Стрелки соответствуют воздействиям группы 1
Черт. 4
Примечание. Аналогичное правило может быть применено к механическим блокировочным устройствам, иногда встраиваемым в органы управления (ручки или маховики), чтобы предотвратить непредусмотренные или бессмысленные действия.
Таблица 2
Примеры рабочих направлений движения для органов управления некоторых типов
|
|
|
|
|
|
|
|
|
||
|
По вертикали |
|
|
|
|
|
||||
|
Пo горизонтали |
Вправо-влево |
|
|
|
|
|
|||
|
Вперед-назад |
|
|
|
|
|||||
|
Комбинированные направления |
|
||||||||
|
Ряд органов управления |
|
|
|
||||||


























* Для допустимого углового перемещения ручки (см. п. 5.2).
На каждом чертеже стрелка соответствует движению органа управления группы 1.
Предполагается, что оператор находится на том месте, где обозначен номер чертежа.
6.3. Другие случаи
Для случаев, на которые не распространяются требования табл. 1, должны, по возможности, соблюдаться правила разд. 4.
7. ИСКЛЮЧЕНИЯ
В обоснованных случаях, когда правила настоящего стандарта не могут быть применены (широко распространенная практика или по причине безопасности), направление результирующего действия, соответствующего воздействию, должно быть четко обозначено на органе управления или около него.
ИНФОРМАЦИОННЫЕ ДАННЫЕ
1. ВНЕСЕН Государственным комитетом СССР по управлению качеством продукции и стандартам
2. Постановлением Государственного комитета СССР по управлению качеством продукции и стандартам от 30.10.89 № 3281 международный стандарт МС МЭК 447-74 «Стандартные направления движения органов управления электрических аппаратов», введен в действие непосредственно в качестве государственного стандарта СССР с 01.07.90
3. Стандарт полностью соответствует СТ СЭВ 6464-88
4. ВЗАМЕН ГОСТ 21991-76
СОДЕРЖАНИЕ