
ГОСУДАРСТВЕННЫЙ СТАНДАРТ СОЮЗА ССР
ОСНОВНЫЕ НОРМЫ ВЗАИМОЗАМЕНЯЕМОСТИ
ПЕРЕДАЧИ ЗУБЧАТЫЕ
ЦИЛИНДРИЧЕСКИЕ
ДОПУСКИ
ГОСТ 1643-81
(СТ СЭВ 641-77, СТ СЭВ 643-77 и
СТ СЭВ 644-77)
ГОСУДАРСТВЕННЫЙ КОМИТЕТ СССР ПО СТАНДАРТАМ
МОСКВА - 1981
РАЗРАБОТАН Министерством энергетического машиностроения, Министерством высшего и среднего специального образования РСФСР
ИСПОЛНИТЕЛИ
Л.А. Архангельский, д-р техн. наук, Г.Д. Швецова, канд. техн. наук, Б.А. Тайц, д-р техн. наук
ВНЕСЕН Министерством энергетического машиностроения
Зам. министра В.М. Величко
УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Постановлением Государственного комитета СССР по стандартам от 21 апреля 1981 г. № 2046
ГОСУДАРСТВЕННЫЙ СТАНДАРТ СОЮЗА ССР
|
Основные нормы взаимозаменяемости ПЕРЕДАЧИ ЗУБЧАТЫЕ ЦИЛИНДРИЧЕСКИЕ Допуски Basic
requirements for interchangeability. |
ГОСТ (СТ СЭВ 641-77, Взамен |
Постановлением Государственного комитета СССР по стандартам от 21 апреля 1981 г. № 2046 срок введения установлен
с 01.07 1981 г.
Несоблюдение стандарта преследуется по закону
Настоящий стандарт распространяется на эвольвентные цилиндрические зубчатые колеса и зубчатые передачи внешнего и внутреннего зацепления с прямозубыми, косозубыми и шевронными зубчатыми колесами с делительным диаметром до 6300 мм, шириной зубчатого венца или полушеврона до 1250 мм, модулем зубьев от 1 до 55 мм, с исходным контуром по ГОСТ 13755-81.
Стандарт полностью соответствует стандарту СЭВ СТ СЭВ 641-77, а в части терминов и обозначений стандартам СТ СЭВ 643-77 и СТ СЭВ 644-77.
1. СТЕПЕНИ ТОЧНОСТИ И ВИДЫ СОПРЯЖЕНИЙ
1.1. Устанавливаются двенадцать степеней точности зубчатых колес и передач, обозначаемых в порядке убывания точности цифрами 1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11 и 12.
Примечание. Для степеней точности 1 и 2 допуски и предельные отклонения не даны. Эти степени предусмотрены для будущего развития.
1.2. Для каждой степени точности зубчатых колес и передач устанавливаются нормы: кинематической точности, плавности работы и контакта зубьев зубчатых колес в передаче.
1.3. Допускается комбинирование норм кинематической точности, норм плавности работы и норм контакта зубьев зубчатых колес и передач разных степеней точности.
1.4. При комбинировании норм разных степеней точности нормы плавности работы зубчатых колес и передач могут быть не более чем на две степени точнее или на одну степень грубее норм кинематической точности; нормы контакта зубьев могут назначаться по любым степеням, более точным, чем нормы плавности работы зубчатых колес и передач, а также на одну степень грубее норм плавности.
1.5. Устанавливаются шесть видов сопряжений зубчатых колес в передаче А, В, С, D, Е, Н и восемь видов допуска Тjn на боковой зазор х, у, z, a, b, с, d, h.
Обозначения даны в порядке убывания величины бокового зазора и допуска на него (см. чертеж).
Виды сопряжений и гарантированные боковые зазоры
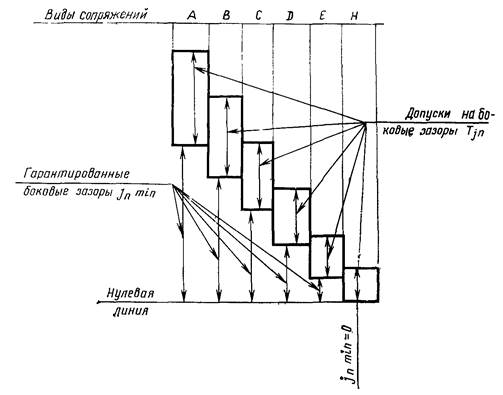
Примечание. Сопряжение вида В обеспечивает минимальную величину бокового зазора, при котором исключается возможность заклинивания стальной или чугунной передачи от нагрева при разности температур зубчатых колес и корпуса в 25 °С.
Виды сопряжений зубчатых колес в передаче в зависимости от степени точности по нормам плавности работы указаны в табл. 1.
Таблица 1
|
А |
Б |
С |
D |
Е |
H |
|
|
Степень точности по нормам плавности работы |
3 - 12 |
3 - 11 |
3 - 9 |
3 - 8 |
3 - 7 |
3 - 7 |
1.6. Видам сопряжений Н и Е соответствует вид допуска на боковой зазор h, а видам сопряжений D, С, В и А - виды допуска d, с, b и а соответственно.
Соответствие между видом сопряжения зубчатых колес в передаче и видом допуска на боковой зазор допускается изменять; при этом также могут быть использованы виды допусков х, у, z.
1.7. Устанавливаются шесть классов отклонений межосевого расстояния, обозначаемых в порядке убывания точности римскими цифрами от I до VI.
Гарантированный боковой зазор в каждом сопряжении обеспечивается при соблюдении предусмотренных классов отклонений межосевого расстояния (для сопряжений Н и Е - II класса, а для сопряжений D, С, В и А - классов III, IV, V и VI соответственно).
Допускается изменять соответствие между видом сопряжения и классом отклонений межосевого расстояния.
1.8. Точность изготовления зубчатых колес и передач задается степенью точности, а требования к боковому зазору - видом сопряжения по нормам бокового зазора.
Пример условного обозначения точности цилиндрической передачи со степенью точности 7 по всем трем нормам, с видом сопряжения зубчатых колес С и соответствием между видом сопряжения и видом допуска на боковой зазор, а также между видом сопряжения и классом отклонений межосевого расстояния;
7-С ГОСТ 1643-81
1.9. При комбинировании норм разных степеней точности и изменении соответствия между видом сопряжения и видом допуска на боковой зазор, но при сохранении соответствия между видом сопряжения и классом отклонений межосевого расстояния, точность зубчатых колес и передач обозначается последовательным написанием трех цифр и двух букв.
Первая цифра обозначает степень по нормам кинематической точности, вторая - степень по нормам плавности работы, третья - по нормам контакта зубьев, первая из букв - вид сопряжения, а вторая - вид допуска на боковой зазор.
Цифры между собой и от слитно пишущихся букв разделяются тире.
Пример условного обозначения точности цилиндрической передачи со степенью 8 по нормам кинематической точности, со степенью 7 по нормам плавности, со степенью 6 по нормам контакта зубьев, с видом сопряжения В, видом допуска на боковой зазор а и соответствием между видом сопряжения и классом отклонений межосевого расстояния:
8-7-6-Ва ГОСТ 1643-81
Примечание. В случаях, когда на одну из норм не задается степень точности, взамен соответствующей цифры указывается буква N.
1.10. При выборе более грубого класса отклонений межосевого расстояния, чем предусмотрено для данного вида сопряжения, в условном обозначении точности цилиндрической передачи указывается принятый класс и рассчитанный по формуле уменьшенный гарантированный боковой зазор:
![]()
где jnmin и fa - табличные значения гарантированного бокового зазора и предельного отклонения межосевого расстояния для данного вида сопряжения (см. табл. 13);
j'nmin - рассчитанный гарантированный боковой зазор;
f'a - отклонение межосевого расстояния для более грубого класса.
Пример условного обозначения точности цилиндрической передачи со степенью точности 7 по всем нормам, с видом сопряжения зубчатых колес С, видом допуска на боковой зазор а и классом отклонений межосевого расстояния V (при межосевом расстоянии передачи аw = 450 мм, j¢nmin = 128 мкм):
7-Ca/V-128 ГОСТ 1643-81
Примечание. При принятии более точного класса отклонений межосевого расстояния наименьший боковой зазор в передаче будет больше бокового зазора, указанного в табл. 13. Его величина, рассчитанная по той же формуле, может не указываться в условном обозначении точности передач.
1.11. Термины и обозначения, используемые в настоящем стандарте, соответствуют стандартам СЭВ СТ СЭВ 643-77 и СТ СЭВ 644-77 и приведены в справочном приложении 1.
2. НОРМЫ ТОЧНОСТИ
2.1. Показатели кинематической точности устанавливаются по табл. 2.
2.1.1. Если кинематическая точность зубчатых колес относительно рабочей оси (см. п. 2.9) соответствует требованиям настоящего стандарта и требование селективной сборки не выдвигается, кинематическую точность зубчатых передач допускается не контролировать.
2.1.2. При соответствии кинематической точности окончательно собранной передачи требованиям настоящего стандарта контроль кинематической точности зубчатых колес не является необходимым.
Таблица 2
Показатели кинематической точности
|
Показатель точности или комплекс |
Степень точности |
||||||||||
|
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
12 |
||
|
Зубчатое колесо |
F¢ir |
´ |
´ |
´ |
´ |
´ |
´ |
- |
- |
- |
- |
|
FPr и FPkr |
´ |
´ |
´ |
´ |
- |
- |
- |
- |
- |
||
|
FPr |
- |
- |
- |
- |
´ |
´ |
- |
- |
- |
- |
|
|
Fcr и Frr |
´ |
´ |
´ |
´ |
´ |
´ |
- |
- |
- |
- |
|
|
FvWr и Frr |
´ |
´ |
´ |
´ |
´ |
´ |
- |
- |
- |
- |
|
|
FvWr и F²ir |
- |
- |
´ |
´ |
´ |
´ |
- |
- |
- |
- |
|
|
Fcr и F²ir |
- |
- |
´ |
´ |
´ |
´ |
- |
- |
- |
- |
|
|
F²ir |
- |
- |
- |
- |
- |
- |
´ |
´ |
´ |
´ |
|
|
Frr |
- |
- |
- |
- |
´* |
´* |
´ |
´ |
´ |
´ |
|
|
Зубчатая передача |
F¢i0r |
´ |
´ |
´ |
´ |
´ |
´ |
- |
- |
- |
- |
* Только при делительных диаметрах зубчатых колес свыше 1600 мм.
2.2. Показатели плавности работы зубьев устанавливаются по табл. 3 для степеней точности 3 - 8 в зависимости от граничных значений номинального коэффициента осевого перекрытия eb и степени точности по нормам контакта (табл. 4), для степеней точности 9 - 12 - независимо от eb.
2.2.1. Если точность зубчатых колес по нормам плавности соответствует требованиям настоящего стандарта, плавность работы передач допускается не контролировать.
Таблица 3
Показатели плавности работы
|
Показатель точности или комплекс |
Степень точности |
||||||||||
|
3 |
4 |
5 |
6 |
7 |
8 |
9 |
19 |
11 |
12 |
||
|
Зубчатое колесо передачи с eb, менее указанного в табл. 4 |
f¢ir |
´ |
´ |
´ |
´ |
´ |
´ |
- |
- |
- |
- |
|
fzzr |
´ |
´ |
´ |
´ |
´ |
´ |
- |
- |
- |
- |
|
|
fPbr и ffr |
´ |
´ |
´ |
´ |
´ |
´ |
- |
- |
- |
- |
|
|
fPbr и fPtr |
´ |
´ |
´ |
´ |
´ |
´ |
- |
- |
- |
- |
|
|
f²ir |
- |
- |
´ |
´ |
´ |
´ |
- |
- |
- |
- |
|
|
Зубчатое колесо передачи с любым eb |
f²ir |
- |
- |
- |
- |
- |
- |
´ |
´ |
´ |
´ |
|
fPbr |
- |
- |
- |
- |
- |
- |
´ |
´ |
´ |
´ |
|
|
fPtr |
- |
- |
- |
- |
- |
- |
´ |
´ |
´ |
´ |
|
|
Зубчатое колесо передачи с eb, большим или равным указанному в табл. 4 |
fzkr |
´ |
´ |
´ |
´ |
´ |
´ |
- |
- |
- |
- |
|
fPtr |
- |
- |
´* |
´* |
´ |
´ |
- |
- |
- |
- |
|
|
Зубчатая передача с eb, менее указанного в табл. 4 |
f¢i0r |
´ |
´ |
´ |
´ |
´ |
´ |
- |
- |
- |
- |
|
fzz0r |
´ |
´ |
´ |
´ |
´ |
´ |
- |
- |
- |
- |
|
|
Зубчатая передача с eb, большим или равным указанному в табл. 4 |
fzk0r |
´ |
´ |
´ |
´ |
´ |
´ |
- |
- |
- |
- |
* Допускается применять до 1 января 1985 г.
2.2.2. При соответствии плавности работы передачи требованиям настоящего стандарта контроль плавности работы зубчатых колес не является необходимым.
2.2.3. Показатель точности fzzr применяется при контроле с измерительным зубчатым колесом.
2.2.4. Взамен отклонения шага fPtr в качестве показателя плавности работы зубчатого колеса может применяться разность шагов fvPtr (см. примечание 2 к табл. 8).
2.3. Показатели контакта зубьев устанавливаются в зависимости от граничных значений номинального коэффициента осевого перекрытия eb (см. табл. 4) по табл. 5.
Таблица 4
Граничные значения eb
|
3 |
4 |
5 |
6 |
7 |
8 |
|
|
Граничные значения номинального коэффициента осевого перекрытия eb |
1,25 |
1,5 |
2,0 |
2,5 |
3,0 |
|
Таблица 5
Показатели контакта зубьев
|
Показатель точности или комплекс |
Степень точности |
||||||||||
|
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
13 |
||
|
Зубчатое колесо передачи с eb, менее указанного в табл. 4* |
Fbr |
´ |
´ |
´ |
´ |
´ |
´ |
´ |
´ |
´ |
´ |
|
Fkr |
´ |
´ |
´ |
´ |
´ |
´ |
´ |
´ |
´ |
´ |
|
|
Зубчатое колесо передачи с eb, большим или равным указанному в табл. 4** |
FPxnr и Fkr |
´ |
´ |
´ |
´ |
´ |
´ |
´ |
- |
- |
- |
|
FPxnr и FPbr |
´ |
´ |
´ |
´ |
´ |
´ |
´ |
- |
- |
- |
|
|
Зубчатая передача |
fxr и fyr*** |
´ |
´ |
´ |
´ |
´ |
´ |
´ |
´ |
´ |
´ |
|
Суммарное пятно контакта |
´ |
´ |
´ |
´ |
´ |
´ |
´ |
´ |
´ |
- |
|
|
Мгновенное пятно контакта |
´ |
´ |
´ |
´ |
´ |
´ |
´ |
´ |
´ |
- |
|
* Для степеней точности 9 - 12 при любом eb.
** Для степени точности 9 пря любом eb.
*** Комплекс только для передач с нерегулируемым расположением осей.
2.3.1. Если точность зубчатых колес по нормам контакта и действительные значения fxr и fyr соответствуют требованиям настоящего стандарта, пятно контакта в зубчатой передаче допускается не контролировать.
2.3.2. При соответствии суммарного или мгновенного пятна контакта требованиям настоящего стандарта контроль по другим показателям, определяющим контакт зубьев в передаче, не является необходимым.
2.3.3. Допускается оценивать точность зубчатого колеса по суммарному или мгновенному пятну контакта его зубьев с зубьями измерительного зубчатого колеса.
2.4. Допуски и предельные отклонения по нормам кинематической точности, нормам плавности работы и нормам контакта зубьев для различных степеней точности зубчатых колес и передач устанавливаются по табл. 6 - 12.
Примечание. Зависимости допусков и предельных отклонений от геометрических параметров зубчатых колес и их взаимосвязь, принятые в настоящем стандарте, приведены в справочных приложениях 2 и 3.
2.5. Нормы кинематической точности, кроме Fr, FvW, F²i, нормы плавности работы, кроме f²i, и нормы контакта зубьев в передаче, кроме fx и fn, в зависимости от условий работы зубчатых колес по правым и левым профилям допускается назначать из разных степеней точности. Для нерабочих боковых поверхностей зубьев или поверхностей, используемых ограниченное время при пониженных нагрузках, допускается снижение точности, но не более чем на две степени.
2.6. В тех случаях, когда производится корректировка параметров зацепления с целью улучшения эксплуатационных характеристик передачи под нагрузкой, предельные отклонения и допуски, регламентируемые настоящим стандартом, могут устанавливаться относительно скорректированных значений параметров.
Способ определения пятна контакта, относительные размеры пятна контакта сопряженных поверхностей зубьев и место его расположения на этих поверхностях могут назначаться конструктором передачи.
В этих случаях нормы на суммарное пятно контакта допускается устанавливать независимо от указанных в табл. 12.
2.7. Комплексы показателей точности в соответствии с пп. 2.1 - 2.3 и показатели, обеспечивающие гарантированный боковой зазор (п. 3.2), устанавливаются изготовителем.
Таблица 6
Нормы кинематической точности (показатели F¢ir, Frr, FvWr, Fсr, F²ir)
|
Обозначение |
Модуль m, мм |
Делительный диаметр d, мм |
|||||||
|
До 125 |
Св. 125 до 400 |
Св. 400 до 800 |
Св. 800 до 1600 |
Св. 1600 до 2500 |
Св. 2500 до 4000 |
Cв. 4000 до 6300 |
|||
|
мкм |
|||||||||
|
3 |
F¢i |
От 1 до 10 |
FP + ff (см. примечание 2) |
||||||
|
Fr |
От 1 до 3,5 |
6 |
9 |
11 |
13 |
14 |
- |
- |
|
|
Св. 3,5 » 6,3 |
7 |
10 |
13 |
14 |
16 |
18 |
- |
||
|
» 6,3 » 10 |
8 |
11 |
14 |
16 |
18 |
20 |
22 |
||
|
FvW |
От 1 до 10 |
4 |
7 |
12 |
18 |
- |
- |
- |
|
|
Fc |
От 1 до 10 |
4 |
7 |
12 |
18 |
28 |
40 |
55 |
|
|
4 |
F¢i |
От 1 до 10 |
FP + ff (см. примечание 2) |
||||||
|
Fr |
От 1 до 3,5 |
10 |
15 |
18 |
20 |
22 |
- |
- |
|
|
Св. 3,5 » 6,3 |
11 |
16 |
20 |
22 |
25 |
28 |
- |
||
|
» 6,3 » 10 |
13 |
18 |
22 |
25 |
28 |
32 |
36 |
||
|
FvW |
От 1 до 10 |
6 |
12 |
18 |
28 |
- |
- |
- |
|
|
Fc |
От 1 до 10 |
6 |
12 |
18 |
28 |
45 |
60 |
90 |
|
|
5 |
F¢i |
От 1 до 16 |
FP + ff (см. примечание 2) |
||||||
|
Fr |
От 1 до 3,5 |
16 |
22 |
28 |
32 |
36 |
- |
- |
|
|
Св. 3,5 » 6,3 |
18 |
25 |
32 |
36 |
40 |
45 |
- |
||
|
» 6,3 » 10 |
20 |
28 |
36 |
40 |
45 |
50 |
56 |
||
|
» 10 » 16 |
- |
32 |
40 |
45 |
50 |
56 |
63 |
||
|
FvW |
От 1 до 16 |
10 |
18 |
28 |
45 |
- |
- |
- |
|
|
F²i |
От 1 до 3,5 |
22 |
32 |
40 |
45 |
- |
- |
- |
|
|
Св. 3,5 » 6,3 |
25 |
36 |
45 |
50 |
- |
- |
- |
||
|
» 6,3 » 10 |
28 |
40 |
50 |
56 |
- |
- |
- |
||
|
» 10 » 16 |
- |
45 |
56 |
63 |
- |
- |
- |
||
|
Fc |
От 1 до 16 |
10 |
18 |
28 |
45 |
70 |
90 |
140 |
|
|
6 |
F¢i |
От 1 до 16 |
FP + ff (см. примечание 2) |
||||||
|
Fr |
От 1 до 3,5 |
25 |
36 |
45 |
50 |
56 |
- |
- |
|
|
Св. 3,5 » 6,3 |
28 |
40 |
50 |
56 |
63 |
71 |
- |
||
|
» 6,3 » 10 |
32 |
45 |
56 |
63 |
71 |
80 |
90 |
||
|
» 10 » 16 |
- |
50 |
63 |
71 |
80 |
90 |
100 |
||
|
FvW |
От 1 до 16 |
16 |
28 |
45 |
70 |
- |
- |
- |
|
|
F²i |
От 1 до 3,5 |
36 |
50 |
63 |
71 |
- |
- |
- |
|
|
Св. 3,5 » 6,3 |
40 |
56 |
71 |
80 |
- |
- |
- |
||
|
» 6,3 » 10 |
45 |
63 |
80 |
90 |
- |
- |
- |
||
|
» 10 » 16 |
- |
71 |
90 |
100 |
- |
- |
- |
||
|
Fc |
От 1 до 16 |
16 |
28 |
45 |
70 |
110 |
140 |
220 |
|
|
7 |
F¢i |
От 1 до 25 |
FP + ff (см. примечание 2) |
||||||
|
Fr |
От 1 до 3,5 |
36 |
50 |
63 |
71 |
80 |
- |
- |
|
|
Св. 3,5 » 6,3 |
40 |
56 |
71 |
80 |
90 |
100 |
- |
||
|
» 6,3 » 10 |
15 |
63 |
80 |
90 |
100 |
112 |
125 |
||
|
» 10 » 16 |
- |
71 |
90 |
100 |
112 |
125 |
140 |
||
|
» 16 » 25 |
- |
80 |
100 |
112 |
125 |
140 |
160 |
||
|
FvW |
От 1 до 25 |
22 |
40 |
60 |
100 |
- |
- |
- |
|
|
F²i |
От 1 до 3,5 |
50 |
71 |
90 |
100 |
- |
- |
- |
|
|
Св. 3,5 » 6,3 |
56 |
80 |
100 |
112 |
- |
- |
- |
||
|
» 6,3 » 10 |
63 |
90 |
112 |
125 |
- |
- |
- |
||
|
» 10 » 16 |
- |
100 |
125 |
140 |
- |
- |
- |
||
|
Fc |
От 1 до 25 |
22 |
40 |
60 |
100 |
160 |
200 |
300 |
|
|
8 |
F¢i |
От 1 до 25 |
FP + ff (см. примечание 2) |
||||||
|
Fr |
От 1 до 3,5 |
45 |
63 |
80 |
90 |
100 |
- |
- |
|
|
Св. 3,5 » 6,3 |
50 |
71 |
90 |
100 |
112 |
125 |
- |
||
|
» 6,3 » 10 |
56 |
80 |
100 |
112 |
125 |
140 |
160 |
||
|
» 10 » 16 |
- |
90 |
112 |
125 |
140 |
160 |
180 |
||
|
» 16 » 25 |
- |
100 |
125 |
140 |
160 |
180 |
200 |
||
|
» 25 » 40 |
- |
- |
140 |
160 |
190 |
224 |
250 |
||
|
F²i |
От 1 до 3,5 |
63 |
90 |
112 |
125 |
- |
- |
- |
|
|
Св. 3,5 » 6,3 |
71 |
100 |
125 |
140 |
- |
- |
- |
||
|
» 6,3 » 10 |
80 |
112 |
140 |
160 |
- |
- |
- |
||
|
» 10 » 16 |
- |
125 |
160 |
180 |
- |
- |
- |
||
|
FvW |
От 1 до 40 |
28 |
50 |
80 |
120 |
- |
- |
- |
|
|
Fc |
От 1 до 40 |
28 |
50 |
80 |
120 |
200 |
250 |
400 |
|
|
9 |
Fr |
От 1 до 3,5 |
71 |
80 |
100 |
112 |
125 |
- |
- |
|
Св. 3,5 » 6,3 |
80 |
100 |
112 |
125 |
140 |
160 |
- |
||
|
» 6,3 » 10 |
90 |
112 |
125 |
140 |
160 |
180 |
200 |
||
|
» 10 » 16 |
- |
125 |
160 |
160 |
180 |
200 |
224 |
||
|
» 16 » 25 |
- |
160 |
200 |
200 |
224 |
224 |
250 |
||
|
» 25 » 40 |
- |
- |
250 |
250 |
280 |
280 |
315 |
||
|
» 40 » 55 |
- |
- |
315 |
315 |
355 |
355 |
400 |
||
|
F²i |
От 1 до 3,5 |
90 |
112 |
140 |
160 |
- |
- |
- |
|
|
Св. 3,5 » 6,3 |
112 |
140 |
160 |
180 |
- |
- |
- |
||
|
» 6,3 » 10 |
125 |
160 |
180 |
200 |
- |
- |
- |
||
|
» 10 » 16 |
- |
180 |
224 |
224 |
- |
- |
- |
||
|
10 |
Fr |
От 1 до 3,5 |
100 |
112 |
125 |
140 |
160 |
- |
- |
|
Св. 3,5 » 6,3 |
125 |
140 |
140 |
160 |
180 |
200 |
- |
||
|
» 6,3 » 10 |
140 |
160 |
160 |
180 |
200 |
224 |
250 |
||
|
» 10 » 16 |
- |
180 |
200 |
200 |
224 |
250 |
280 |
||
|
» 16 » 25 |
- |
224 |
250 |
250 |
280 |
280 |
315 |
||
|
» 25 » 40 |
- |
- |
315 |
315 |
355 |
355 |
400 |
||
|
» 40 » 55 |
- |
- |
400 |
400 |
450 |
450 |
500 |
||
|
F²i |
От 1 до 3,5 |
140 |
160 |
180 |
200 |
- |
- |
- |
|
|
Св. 3,5 » 6,3 |
180 |
200 |
200 |
224 |
- |
- |
- |
||
|
» 6,3 » 10 |
200 |
224 |
224 |
250 |
- |
- |
- |
||
|
» 10 » 16 |
- |
250 |
280 |
280 |
- |
- |
- |
||
|
11 |
Fr |
От 1 до 3,5 |
125 |
140 |
160 |
180 |
200 |
- |
- |
|
Св. 3,5 » 6,3 |
160 |
180 |
180 |
200 |
224 |
250 |
- |
||
|
» 6,3 » 10 |
180 |
200 |
200 |
224 |
250 |
280 |
315 |
||
|
» 10 » 16 |
- |
224 |
250 |
250 |
280 |
315 |
355 |
||
|
» 16 » 25 |
- |
280 |
315 |
315 |
355 |
355 |
400 |
||
|
» 25 » 40 |
- |
- |
400 |
400 |
450 |
450 |
500 |
||
|
» 40 » 55 |
- |
- |
500 |
500 |
560 |
560 |
630 |
||
|
F²i |
От 1 до 3,5 |
180 |
200 |
224 |
250 |
- |
- |
- |
|
|
Св. 3,5 » 6,3 |
224 |
250 |
250 |
280 |
- |
- |
- |
||
|
» 6,3 » 10 |
250 |
280 |
280 |
315 |
- |
- |
- |
||
|
» 10 » 16 |
- |
315 |
355 |
355 |
- |
- |
- |
||
|
12 |
Fr |
От 1 до 3,5 |
160 |
180 |
200 |
224 |
250 |
- |
- |
|
Св. 3,5 » 6,3 |
200 |
224 |
224 |
250 |
280 |
315 |
- |
||
|
» 6,3 » 10 |
224 |
250 |
250 |
280 |
315 |
355 |
400 |
||
|
» 10 » 16 |
- |
280 |
315 |
315 |
355 |
400 |
450 |
||
|
» 16 » 25 |
- |
355 |
400 |
400 |
450 |
450 |
500 |
||
|
» 25 » 40 |
- |
- |
500 |
500 |
560 |
560 |
630 |
||
|
» 40 » 55 |
- |
- |
630 |
630 |
710 |
710 |
800 |
||
|
F²i |
От 1 до 3,5 |
224 |
250 |
280 |
315 |
- |
- |
- |
|
|
Св. 3,5 » 6,3 |
280 |
315 |
315 |
355 |
- |
- |
- |
||
|
» 6,3 » 10 |
315 |
355 |
355 |
400 |
- |
- |
- |
||
|
» 10 » 16 |
- |
400 |
450 |
450 |
- |
- |
- |
||
Примечания:
1. Принятые обозначения:
F¢i - допуск на кинематическую погрешность зубчатого колеса;
Fr - допуск на радиальное биение зубчатого венца;
Fc - допуск на погрешность обката;
F²i - допуск на колебание измерительного межосевого расстояния за оборот зубчатого колеса;
FvW - допуск на колебание длины общей нормали.
2. Для определения F¢i принимают FP по табл. 7 и ff по табл. 8.
Допускается нормировать кинематическую погрешность на k шагах - F¢ik, величина которой определяется по формуле
F¢ik = FPk + ff,
Fpk - принимается по табл. 7.
3. Допуск на кинематическую погрешность передачи F¢i0 равен сумме допусков на кинематическую погрешность ее зубчатых колес. Для передач, составленных из зубчатых колес, имеющих кратные между собой числа зубьев при отношении этих чисел не более трех (1, 2, 3), допуск на наибольшую кинематическую погрешность передачи, при ее селективной сборке, может быть сокращен на 25 % или более, исходя из расчета.
4. Для шевронных зубчатых колес наибольшая алгебраическая разность значений накопленных погрешностей шага (т.е. взятых со своим знаком) на одноименных боковых поверхностях зубьев двух полушевронов, в любом общем для них осевом сечении, не должна превышать допуска на накопленную погрешность шага по зубчатому колесу Fp.
5. При комбинировании норм кинематической точности и плавности работы из разных степеней точности допуск на колебание измерительного межосевого расстояния за оборот зубчатого колеса определяют по формуле
|F²i|k0mb = |F²i - f²i|F + |f²i|f.
где допуски, входящие в первое слагаемое (с индексом F), принимаются по степени для норм кинематической точности, а допуск, входящий во второе слагаемое (с индексом f), принимается по степени для норм плавности работы.
6. Допускается, чтобы одна из величин, входящих в комплекс показателей кинематической точности, превосходила предельное значение, если суммарное влияние обеих величин не превышает F¢i.
Таблица 7
Нормы кинематической точности (показатели FPkr и FРr)
|
Обозначение |
Модуль m, мм |
Для FPk - длина дуги делительной окружности L, мм |
|||||||||||||||
|
До 11,2 |
Св. 11,2 до 20 |
Св. 20 до 32 |
Св. 32 до 50 |
Св. 50 до 80 |
Св. 80 до 160 |
Св. 160 до 315 |
Св. 315 до 630 |
Св. 630 до 1000 |
Св. 1000 до 1600 |
Св. 1600 до 2500 |
Св. 2500 до 3150 |
Св. 3150 до 4000 |
Св. 4000 до 5000 |
Св. 5000 до 7200 |
|||
|
Для FР - делительный диаметр d, мм |
|||||||||||||||||
|
- |
До 12,7 |
Св. 12,7 до 20,4 |
Св. 20,4 до 31,8 |
Св. 31,8 до 50,9 |
Св. 50,9 до 101,8 |
Св. 101,8 до 200,5 |
Св. 200,5 до 401,1 |
Св. 401,1 до 636,6 |
Св. 636,6 до 1019 |
Св. 1019 до 1592 |
Св. 1592 до 2005 |
Св. 2005 до 2547 |
Св. 2547 до 3183 |
Св. 3183 до 4584 |
|||
|
мкм |
|||||||||||||||||
|
3 |
|FPk| или |FР| |
От 1 до 10 |
2,8 |
4,0 |
5,0 |
5,5 |
6,0 |
8,0 |
11 |
16 |
20 |
25 |
28 |
36 |
40 |
45 |
50 |
|
4 |
» 1 » 10 |
4,5 |
6 |
8 |
9 |
10 |
12 |
18 |
25 |
32 |
40 |
45 |
56 |
63 |
71 |
80 |
|
|
5 |
» 1 » 16 |
7 |
10 |
12 |
14 |
16 |
20 |
28 |
40 |
50 |
63 |
71 |
90 |
100 |
112 |
125 |
|
|
6 |
» 1 » 16 |
11 |
16 |
20 |
22 |
25 |
32 |
45 |
63 |
80 |
100 |
112 |
140 |
160 |
180 |
200 |
|
|
7 |
» 1 » 25 |
16 |
22 |
28 |
32 |
36 |
45 |
63 |
90 |
112 |
140 |
160 |
200 |
224 |
250 |
280 |
|
|
8 |
» 1 » 25 |
22 |
32 |
40 |
45 |
50 |
63 |
90 |
125 |
160 |
200 |
224 |
280 |
315 |
355 |
400 |
|
Примечания:
1. Принятые обозначения:
FPk - допуск на накопленную погрешность k шагов,
FР - допуск на накопленную погрешность шага зубчатого колеса.
2. При отсутствии специальных требований допуск на FPk назначается для длины дуги делительной окружности, соответствующей 1/6 части числа зубьев зубчатого колеса (или дуги, соответствующей ближайшему большему целому числу зубьев).
Таблица 8
Нормы плавности работы (показатели f¢ir, fPtr, fРbr, ffr, f²ir)
|
Обозначение |
Модуль m, мм |
Делительный диаметр d, мм |
|||||||
|
До 125 |
Св. 125 до 400 |
Св. 400 до 800 |
Св. 800 до 1600 |
Св. 1600 до 2500 |
Св. 2500 до 4000 |
Св. 4000 до 6300 |
|||
|
мкм |
|||||||||
|
3 |
f¢i |
От 1 до 3,5 |
6 |
7 |
8 |
9 |
12 |
- |
- |
|
Св. 3,5 » 6,3 |
7 |
8 |
9 |
10 |
12 |
14 |
- |
||
|
» 6,3 » 10 |
8 |
9 |
10 |
11 |
14 |
16 |
22 |
||
|
fPt |
От 1 до 3,5 |
±2,5 |
±2,8 |
±3,2 |
±3,6 |
±4,0 |
- |
- |
|
|
Св. 3,5 » 6,3 |
±3,2 |
±3,6 |
±3,6 |
±4,0 |
±4,5 |
±5,0 |
- |
||
|
» 6,3 » 10 |
±3,6 |
±4,0 |
±4,5 |
±4,5 |
±5,0 |
±5,5 |
±6,0 |
||
|
fPb |
От 1 до 3,5 |
±2,4 |
±2,6 |
±3 |
±3,4 |
±3,8 |
- |
- |
|
|
Св. 3,5 » 6,3 |
±3 |
±3,4 |
±3,4 |
±3,8 |
±4,2 |
±4,8 |
- |
||
|
» 6,3 » 10 |
±3,4 |
±3,8 |
±4,2 |
±4,2 |
±4,8 |
±5,3 |
±5,6 |
||
|
ff |
От 1 до 3,5 |
3,6 |
4,0 |
4,5 |
5,5 |
7,5 |
- |
- |
|
|
Св. 3,5 » 6,3 |
4,0 |
4,5 |
5,0 |
6,0 |
8,0 |
10 |
- |
||
|
» 6,3 » 10 |
4,5 |
5,0 |
5,5 |
6,5 |
8,5 |
10,5 |
15 |
||
|
4 |
f¢i |
От 1 до 3,5 |
9 |
10 |
12 |
14 |
16 |
- |
- |
|
Св. 3,5 » 6,3 |
10 |
12 |
14 |
16 |
18 |
22 |
- |
||
|
» 6,3 » 10 |
12 |
14 |
16 |
18 |
20 |
25 |
32 |
||
|
fPt |
От 1 до 3,5 |
±4 |
±4,5 |
±5 |
±5,5 |
±6 |
- |
- |
|
|
Св. 3,5 » 6,3 |
±5 |
±5,5 |
±5,5 |
±6 |
±7 |
±8 |
- |
||
|
» 6,3 » 10 |
±5,5 |
±6 |
±7 |
±7 |
±9 |
±9 |
±10 |
||
|
fPb |
От 1 до 3,5 |
±3,8 |
±4,2 |
±4,8 |
±5,3 |
±5,6 |
- |
- |
|
|
Св. 3,5 » 6,3 |
±4,8 |
±5,3 |
±5,3 |
±5,6 |
±6,7 |
±7,5 |
- |
||
|
» 6,3 » 10 |
±5,3 |
±5,6 |
±6,7 |
±6,7 |
±7,5 |
±8,5 |
±9,5 |
||
|
ff |
От 1 до 3,5 |
4,8 |
5,3 |
6,5 |
8,0 |
11 |
- |
- |
|
|
Св. 3,5 » 6,3 |
5,3 |
6,0 |
7,0 |
9,0 |
11,5 |
15 |
- |
||
|
» 6,3 » 10 |
6,0 |
6,5 |
7,5 |
9,5 |
12 |
16 |
22 |
||
|
5 |
f¢i |
От 1 до 3,5 |
12 |
14 |
18 |
20 |
25 |
- |
- |
|
Св. 3,5 » 6,3 |
16 |
18 |
20 |
22 |
28 |
36 |
- |
||
|
» 6,3 » 10 |
18 |
20 |
22 |
25 |
32 |
40 |
50 |
||
|
» 10 » 16 |
- |
22 |
25 |
28 |
36 |
45 |
56 |
||
|
fPt |
От 1 до 3,5 |
±6 |
±7 |
±8 |
±9 |
±10 |
- |
- |
|
|
Св. 3,5 » 6,3 |
±8 |
±9 |
±9 |
±10 |
±11 |
±13 |
- |
||
|
» 6,3 » 10 |
±9 |
±10 |
±11 |
±11 |
±13 |
±14 |
±16 |
||
|
» 10 » 16 |
- |
±11 |
±13 |
±13 |
±14 |
±16 |
±18 |
||
|
fPb |
От 1 до 3,5 |
±5,6 |
±6,7 |
±7,5 |
±8,5 |
±9,5 |
- |
- |
|
|
Св. 3,5 » 6,3 |
±7,5 |
±8,5 |
±8,5 |
±9,5 |
±10 |
±12 |
- |
||
|
» 6,3 » 10 |
±8,5 |
±9,5 |
±10 |
±10 |
±12 |
±13 |
±14 |
||
|
» 10 » 16 |
- |
±10 |
±12 |
±12 |
±13 |
±15 |
±16 |
||
|
ff |
От 1 до 3,5 |
6 |
7 |
9 |
11 |
16 |
- |
- |
|
|
Св. 3,5 » 6,3 |
7 |
8 |
10 |
13 |
17 |
22 |
- |
||
|
» 6,3 » 10 |
8 |
9 |
11 |
14 |
18 |
24 |
34 |
||
|
» 10 » 16 |
- |
11 |
13 |
15 |
20 |
25 |
36 |
||
|
f²i |
От 1 до 3,5 |
10 |
11 |
13 |
14 |
- |
- |
- |
|
|
Св. 3,5 » 6,3 |
13 |
14 |
14 |
16 |
- |
- |
- |
||
|
» 6,3 » 10 |
14 |
16 |
16 |
18 |
- |
- |
- |
||
|
» 10 » 16 |
- |
18 |
20 |
20 |
- |
- |
- |
||
|
6 |
f¢i |
От 1 до 3,5 |
18 |
20 |
25 |
32 |
40 |
- |
- |
|
Св. 3,5 » 6,3 |
22 |
25 |
28 |
36 |
45 |
56 |
- |
||
|
» 6,3 » 10 |
28 |
30 |
32 |
40 |
50 |
60 |
80 |
||
|
» 10 » 16 |
- |
36 |
40 |
45 |
56 |
63 |
90 |
||
|
fPt |
От 1 до 3,5 |
±10 |
±11 |
±13 |
±14 |
±16 |
- |
- |
|
|
Св. 3,5 » 6,3 |
±13 |
±14 |
±14 |
±16 |
±18 |
±20 |
- |
||
|
» 6,3 » 10 |
±14 |
±16 |
±18 |
±18 |
±20 |
±22 |
±25 |
||
|
» 10 » 16 |
- |
±18 |
±20 |
±20 |
±22 |
±25 |
±28 |
||
|
fPb |
От 1 до 3,5 |
±9,5 |
±10 |
±12 |
±13 |
±15 |
- |
- |
|
|
Св. 3,5 » 6,3 |
±12 |
±13 |
±13 |
±15 |
±17 |
±19 |
- |
||
|
» 6,3 » 10 |
±13 |
±15 |
±17 |
±17 |
±19 |
±21 |
±24 |
||
|
» 10 » 16 |
- |
±17 |
±19 |
±19 |
±21 |
±24 |
±26 |
||
|
ff |
От 1 до 3,5 |
8 |
9 |
12 |
17 |
24 |
- |
- |
|
|
Св. 3,5 » 6,3 |
10 |
11 |
14 |
18 |
25 |
34 |
- |
||
|
» 6,3 » 10 |
12 |
13 |
16 |
20 |
28 |
36 |
53 |
||
|
» 10 » 16 |
- |
16 |
18 |
22 |
30 |
38 |
56 |
||
|
f²i |
От 1 до 3,5 |
14 |
16 |
18 |
20 |
- |
- |
- |
|
|
Св. 3,5 » 6,3 |
18 |
20 |
20 |
22 |
- |
- |
- |
||
|
» 6,3 » 10 |
20 |
22 |
22 |
25 |
- |
- |
- |
||
|
» 10 » 16 |
- |
25 |
28 |
28 |
- |
- |
- |
||
|
7 |
f¢i |
От 1 до 3,5 |
25 |
30 |
36 |
45 |
56 |
- |
- |
|
Св. 3,5 » 6,3 |
32 |
36 |
40 |
50 |
63 |
80 |
- |
||
|
» 6,3 » 10 |
36 |
40 |
50 |
56 |
71 |
90 |
112 |
||
|
» 10 » 16 |
- |
50 |
56 |
63 |
80 |
100 |
125 |
||
|
» 16 » 25 |
- |
63 |
71 |
80 |
90 |
112 |
140 |
||
|
fPt |
От 1 до 3,5 |
±14 |
±16 |
±18 |
±20 |
±22 |
- |
- |
|
|
Св. 3,5 » 6,3 |
±18 |
±20 |
±20 |
±22 |
±25 |
±28 |
- |
||
|
» 6,3 » 10 |
±20 |
±22 |
±25 |
±25 |
±28 |
±32 |
±36 |
||
|
» 10 » 16 |
- |
±25 |
±28 |
±28 |
±32 |
±36 |
±40 |
||
|
» 16 » 25 |
- |
±32 |
±36 |
±36 |
±40 |
±40 |
±45 |
||
|
fPb |
От 1 до 3,5 |
±13 |
±15 |
±17 |
±19 |
±21 |
- |
- |
|
|
Св. 3,5 » 6,3 |
±17 |
±19 |
±19 |
±21 |
±24 |
±26 |
- |
||
|
» 6,3 » 10 |
±19 |
±21 |
±24 |
±24 |
±26 |
±30 |
±34 |
||
|
» 10 » 16 |
- |
±24 |
±26 |
±26 |
±30 |
±34 |
±38 |
||
|
» 16 » 25 |
- |
±30 |
±34 |
±34 |
±38 |
±38 |
±42 |
||
|
ff |
От 1 до 3,5 |
11 |
13 |
17 |
24 |
36 |
- |
- |
|
|
Св. 3,5 » 6,3 |
14 |
16 |
20 |
28 |
38 |
53 |
- |
||
|
» 6,3 » 10 |
17 |
19 |
24 |
30 |
40 |
56 |
80 |
||
|
» 10 » 16 |
- |
22 |
26 |
34 |
45 |
60 |
85 |
||
|
» 16 » 25 |
- |
30 |
36 |
42 |
53 |
67 |
95 |
||
|
f²i |
От 1 до 3,5 |
20 |
22 |
25 |
28 |
- |
- |
- |
|
|
Св. 3,5 » 6,3 |
25 |
28 |
28 |
32 |
- |
- |
- |
||
|
» 6,3 » 10 |
28 |
32 |
32 |
36 |
- |
- |
- |
||
|
» 10 » 16 |
- |
36 |
40 |
40 |
- |
- |
- |
||
|
8 |
f¢i |
От 1 до 3,5 |
36 |
40 |
50 |
63 |
80 |
- |
- |
|
Св. 3,5 » 6,3 |
45 |
50 |
56 |
71 |
90 |
125 |
- |
||
|
» 6,3 » 10 |
50 |
60 |
71 |
80 |
100 |
140 |
180 |
||
|
» 10 » 16 |
- |
71 |
80 |
90 |
112 |
140 |
200 |
||
|
» 16 » 25 |
- |
90 |
100 |
112 |
140 |
160 |
224 |
||
|
fPt |
От 1 до 3,5 |
±20 |
±22 |
±25 |
±28 |
±32 |
- |
- |
|
|
Св. 3,5 » 6,3 |
±25 |
±28 |
±28 |
±32 |
±36 |
±40 |
- |
||
|
» 6,3 » 10 |
±28 |
±32 |
±36 |
±36 |
±40 |
±45 |
±50 |
||
|
» 10 » 16 |
- |
±36 |
±40 |
±40 |
±45 |
±50 |
±56 |
||
|
» 16 » 25 |
- |
±45 |
±50 |
±50 |
±56 |
±56 |
±63 |
||
|
» 25 » 40 |
- |
- |
±63 |
±63 |
±71 |
±71 |
±80 |
||
|
fPb |
От 1 до 3,5 |
±19 |
±21 |
±24 |
±26 |
±30 |
- |
- |
|
|
Св. 3,5 » 6,3 |
±24 |
±26 |
±26 |
±30 |
±34 |
±38 |
- |
||
|
» 6,3 » 10 |
±26 |
±30 |
±34 |
±34 |
±38 |
±42 |
±48 |
||
|
» 10 » 16 |
- |
±34 |
±38 |
±38 |
±42 |
±48 |
±53 |
||
|
» 16 » 25 |
- |
±42 |
±48 |
±48 |
±53 |
±53 |
±60 |
||
|
» 25 » 40 |
- |
±60 |
±60 |
±67 |
±67 |
±75 |
|||
|
ff |
От 1 до 3,5 |
14 |
18 |
25 |
36 |
50 |
- |
- |
|
|
Св. 3,5 » 6,3 |
20 |
22 |
28 |
40 |
56 |
80 |
- |
||
|
» 6,3 » 10 |
22 |
28 |
36 |
45 |
63 |
90 |
125 |
||
|
» 10 » 16 |
- |
32 |
40 |
50 |
71 |
90 |
130 |
||
|
» 16 » 25 |
- |
45 |
56 |
63 |
80 |
100 |
150 |
||
|
f²i |
От 1 до 3,5 |
28 |
32 |
36 |
40 |
- |
- |
- |
|
|
Св. 3,5 » 6,3 |
36 |
40 |
40 |
45 |
- |
- |
- |
||
|
» 6,3 » 10 |
40 |
45 |
45 |
50 |
- |
- |
- |
||
|
» 10 » 16 |
- |
50 |
56 |
56 |
- |
- |
- |
||
|
9 |
fPt |
От 1 до 3,5 |
±28 |
±32 |
±36 |
±40 |
±45 |
- |
- |
|
Св. 3,5 » 6,3 |
±36 |
±40 |
±40 |
±45 |
±50 |
±56 |
- |
||
|
» 6,3 » 10 |
±40 |
±45 |
±50 |
±50 |
±56 |
±63 |
±71 |
||
|
» 10 » 16 |
- |
±50 |
±56 |
±56 |
±63 |
±71 |
±80 |
||
|
» 16 » 25 |
- |
±63 |
±71 |
±71 |
±80 |
±80 |
±90 |
||
|
» 25 » 40 |
- |
- |
±90 |
±90 |
±100 |
±100 |
±112 |
||
|
» 40 » 55 |
- |
- |
±112 |
±125 |
±125 |
±140 |
±140 |
||
|
fPb |
От 1 до 3,5 |
±26 |
±30 |
±34 |
±38 |
±42 |
- |
- |
|
|
Св. 3,5 » 6,3 |
±34 |
±38 |
±38 |
±42 |
±48 |
±53 |
- |
||
|
» 6,3 » 10 |
±38 |
±42 |
±45 |
±48 |
±53 |
±60 |
±67 |
||
|
» 10 » 16 |
- |
±48 |
±53 |
±53 |
±60 |
±67 |
±75 |
||
|
» 16 » 25 |
- |
±60 |
±67 |
±67 |
±75 |
±75 |
±85 |
||
|
» 25 » 40 |
- |
- |
±85 |
±85 |
±95 |
±95 |
±106 |
||
|
» 40 » 55 |
- |
- |
±106 |
±118 |
±118 |
±132 |
±132 |
||
|
f²i |
От 1 до 3,5 |
36 |
40 |
45 |
50 |
- |
- |
- |
|
|
Св. 3,5 » 6,3 |
45 |
50 |
50 |
56 |
- |
- |
- |
||
|
» 6,3 » 10 |
50 |
56 |
56 |
63 |
- |
- |
- |
||
|
» 10 » 16 |
- |
63 |
71 |
71 |
- |
- |
- |
||
|
10 |
fPt |
От 1 до 3,5 |
±40 |
±45 |
±50 |
±56 |
±63 |
- |
- |
|
Св. 3,5 » 6,3 |
±50 |
±56 |
±56 |
±63 |
±71 |
±80 |
- |
||
|
» 6,3 » 10 |
±56 |
±63 |
±71 |
±71 |
±80 |
±90 |
±100 |
||
|
» 10 » 16 |
- |
±71 |
±80 |
±80 |
±90 |
±100 |
±112 |
||
|
» 16 » 25 |
- |
±90 |
±100 |
±100 |
±112 |
±112 |
±125 |
||
|
» 25 » 40 |
- |
- |
±125 |
±125 |
±140 |
±140 |
±160 |
||
|
» 40 » 55 |
- |
- |
±160 |
±160 |
±180 |
±180 |
±200 |
||
|
fPb |
От 1 до 3,5 |
±38 |
±42 |
±48 |
±53 |
±60 |
- |
- |
|
|
Св. 3,5 » 6,3 |
±48 |
±53 |
±53 |
±60 |
±67 |
±75 |
- |
||
|
» 6,3 » 10 |
±53 |
±60 |
±67 |
±67 |
±75 |
±85 |
±95 |
||
|
» 10 » 16 |
- |
±67 |
±75 |
±75 |
±85 |
±95 |
±106 |
||
|
» 16 » 25 |
- |
±85 |
±95 |
±95 |
±106 |
±106 |
±118 |
||
|
» 25 » 40 |
- |
- |
±118 |
±118 |
±132 |
±132 |
±150 |
||
|
» 40 » 55 |
- |
- |
±150 |
±150 |
±170 |
±170 |
±190 |
||
|
f²i |
От 1 до 3,5 |
45 |
50 |
56 |
63 |
- |
- |
- |
|
|
Св. 3,5 » 6,3 |
56 |
63 |
63 |
71 |
- |
- |
- |
||
|
» 6,3 » 10 |
63 |
71 |
71 |
80 |
- |
- |
- |
||
|
» 10 » 16 |
- |
80 |
90 |
90 |
- |
- |
- |
||
|
11 |
fPt |
От 1 до 3,5 |
±56 |
±63 |
±71 |
±80 |
±90 |
- |
- |
|
Св. 3,5 » 6,3 |
±71 |
±80 |
±80 |
±90 |
±100 |
±112 |
- |
||
|
» 6,3 » 10 |
±80 |
±90 |
±100 |
±100 |
±112 |
±125 |
±140 |
||
|
» 10 » 16 |
- |
±100 |
±112 |
±112 |
±125 |
±140 |
±160 |
||
|
» 16 » 25 |
- |
±125 |
±140 |
±140 |
±160 |
±160 |
±180 |
||
|
» 25 » 40 |
- |
- |
±180 |
±180 |
±200 |
±200 |
±224 |
||
|
» 40 » 55 |
- |
- |
±224 |
±250 |
±250 |
±280 |
±280 |
||
|
fPb |
От 1 до 3,5 |
±53 |
±60 |
±67 |
±75 |
±85 |
|||
|
Св. 3,5 » 6,3 |
±67 |
±75 |
±75 |
±85 |
±90 |
±105 |
- |
||
|
» 6,3 » 10 |
±75 |
±85 |
±95 |
±95 |
±105 |
±110 |
±125 |
||
|
» 10 » 16 |
- |
±95 |
±106 |
±106 |
±110 |
±130 |
±150 |
||
|
» 16 » 25 |
- |
±118 |
±132 |
±132 |
±150 |
±150 |
±170 |
||
|
» 25 » 40 |
- |
- |
±170 |
±170 |
±180 |
±180 |
±212 |
||
|
» 40 » 55 |
- |
- |
±212 |
±236 |
±236 |
±250 |
±250 |
||
|
f²i |
От 1 до 3,5 |
56 |
63 |
71 |
80 |
- |
- |
- |
|
|
Св. 3,5 » 6,3 |
71 |
80 |
80 |
90 |
- |
- |
- |
||
|
» 6,3 » 10 |
80 |
90 |
90 |
100 |
- |
- |
- |
||
|
» 10 » 16 |
- |
100 |
112 |
112 |
- |
- |
- |
||
|
12 |
fPt |
Oт 1 до 3,5 |
±80 |
±90 |
±100 |
±112 |
±125 |
- |
- |
|
Св. 3,5 » 6,3 |
±100 |
±112 |
±112 |
±125 |
±140 |
±160 |
- |
||
|
» 6,3 » 10 |
±112 |
±125 |
±140 |
±140 |
±160 |
±180 |
±200 |
||
|
» 10 » 16 |
- |
±140 |
±160 |
±160 |
±180 |
±200 |
±224 |
||
|
» 16 » 25 |
- |
±180 |
±200 |
±200 |
±224 |
±224 |
±280 |
||
|
» 25 » 40 |
- |
- |
±250 |
±250 |
±280 |
±280 |
±315 |
||
|
» 40 » 55 |
- |
- |
±315 |
±355 |
±355 |
±400 |
±400 |
||
|
fPb |
От 1 до 3,5 |
±75 |
±85 |
±95 |
±106 |
±118 |
- |
- |
|
|
Св. 3,5 » 6,3 |
±95 |
±106 |
±106 |
±118 |
±132 |
±150 |
- |
||
|
» 6,3 » 10 |
±106 |
±118 |
±132 |
±132 |
±150 |
±170 |
±170 |
||
|
» 10 » 16 |
- |
±132 |
±150 |
±150 |
±170 |
±180 |
±190 |
||
|
» 16 » 25 |
- |
±170 |
±190 |
±190 |
±210 |
±212 |
±240 |
||
|
» 25 » 40 |
- |
- |
±236 |
±236 |
±260 |
±260 |
±300 |
||
|
» 40 » 55 |
- |
- |
±300 |
±335 |
±320 |
±375 |
±375 |
||
|
f²i |
От 1 до 3,5 |
71 |
80 |
90 |
100 |
- |
- |
- |
|
|
Св. 3,5 » 6,3 |
90 |
100 |
100 |
112 |
- |
- |
- |
||
|
» 6,3 » 10 |
100 |
112 |
112 |
125 |
- |
- |
- |
||
|
» 10 » 16 |
- |
125 |
140 |
140 |
- |
- |
- |
||
Примечания:
1. Принятые обозначения:
f¢i - допуск на местную кинематическую погрешность зубчатого колеса;
±fPb - предельные отклонения шага зацепления;
±fPt - предельные отклонения шага;
ff - допуск на погрешность профиля зуба;
f²i - допуск на колебание измерительного межосевого расстояния на одном зубе.
2. При установлении допуска на разность любых шагов fvPt в пределах зубчатого колеса взамен предельных отклонений шага его значение не должно превышать 1,6[fPt].
3. Допуск на местную кинематическую погрешность передачи F'i0 принимается равным 1,25f¢i колеса передачи.
4. Допуск на колебание измерительного Межосевого расстояния на одном зубе f²i допускается изменять на величину Df²i, определяемую по формуле, приведенной в справочном приложении 4.
Таблица 9
Нормы плавности работы (показатель fzz0r)
|
Модуль m, мм |
Частота k циклической погрешности (k = z) за оборот зубчатого колеса |
|||||||
|
До 16 |
Св. 16 до 32 |
Св. 32 до 63 |
Св. 63 до 125 |
Св. 125 до 250 |
Св. 250 до 500 |
Св. 500 |
||
|
мкм |
||||||||
|
3 |
От 1 до 3,5 |
3 |
3 |
3 |
3,6 |
4 |
4 |
4,5 |
|
Св. 3,5 » 6,3 |
3,6 |
3,6 |
4 |
4,5 |
5 |
5 |
6 |
|
|
» 6,3 » 10 |
4,2 |
4,5 |
4,5 |
5 |
6 |
6 |
7,1 |
|
|
4 |
От 1 до 3,5 |
4,5 |
5 |
5 |
5,3 |
5,6 |
6,3 |
7,1 |
|
Св. 3,5 » 6,3 |
5,6 |
5,6 |
6 |
6,7 |
7,1 |
8 |
9 |
|
|
» 6,3 » 10 |
6,7 |
7,1 |
7,1 |
8 |
8,5 |
9 |
11 |
|
|
5 |
От 1 до 3,5 |
6,7 |
7,1 |
7,5 |
8 |
8,5 |
9,5 |
11 |
|
Св. 3,5 » 6,3 |
8 |
8,5 |
9 |
10 |
11 |
12 |
14 |
|
|
» 6,3 » 10 |
10 |
11 |
11 |
12 |
13 |
15 |
17 |
|
|
» 10 » 16 |
12 |
13 |
14 |
15 |
16 |
18 |
21 |
|
|
6 |
От 1 до 3,5 |
10 |
10 |
11 |
12 |
13 |
14 |
16 |
|
Св. 3,5 » 6,3 |
12 |
13 |
14 |
15 |
16 |
18 |
21 |
|
|
» 6,3 » 10 |
14 |
16 |
17 |
18 |
19 |
22 |
25 |
|
|
» 10 » 16 |
18 |
19 |
20 |
22 |
24 |
28 |
32 |
|
|
7 |
От 1 до 3,5 |
15 |
16 |
17 |
18 |
19 |
21 |
24 |
|
Св. 3,5 » 6,3 |
18 |
19 |
20 |
22 |
24 |
28 |
30 |
|
|
» 6,3 » 10 |
22 |
24 |
24 |
26 |
30 |
34 |
38 |
|
|
» 10 » 16 |
28 |
28 |
30 |
34 |
36 |
42 |
48 |
|
|
8 |
От 1 до 3,5 |
22 |
24 |
24 |
25 |
28 |
30 |
34 |
|
Св. 3,5 » 6,3 |
28 |
28 |
30 |
32 |
34 |
40 |
45 |
|
|
» 6,3 » 10 |
32 |
34 |
36 |
38 |
42 |
48 |
56 |
|
|
» 10 » 16 |
40 |
42 |
45 |
48 |
53 |
60 |
71 |
|
Примечания:
1. Принятое обозначение:
fzz0 - допуск на циклическую погрешность зубцовой частоты в передаче.
2. При контроле передачи частота k принимается равной z - числу зубьев колеса передачи.
3. При контроле с измерительным зубчатым колесом частота k принимается равной z - числу зубьев контролируемого зубчатого колеса.
fzz - допуск на циклическую погрешность зубцовой частоты зубчатого колеса устанавливается равным 0,6fzz0, принимаемого по табл. 9.
4. Допуск на циклическую погрешность частоты k = 2z, 3z и 4z за оборот колеса передачи устанавливается равным соответственно 0,5; 0,4 и 0,35 fzz0, где fzz0 величина допуска циклической погрешности частоты z, принимаемого по табл. 9.
5. Для передач с эффективным коэффициентом осевого перекрытия ebe 0,45 допуск на циклическую погрешность зубцовой частоты в передаче принимается:
при ebe св. 0,45 до 0,58 равным 0,6 fzz0;
ebe св. 0,58 до 0,67 равным 0,4 fzz0;
св. 0,67 равным 0,3 fzz0,
где fzz0 - принимается по табл. 9.
Соотношение между эффективным ebe и номинальным eb коэффициентами осевого перекрытия, зависящее от степени точности передачи по нормам контакта, определяется по нижеследующим зависимостям:
степени точности 3 и 4 ebe = 0,85 eb;
степень точности 5 ebe = 0,72 eb;
» » 6 ebe = 0,58 eb;
» » 7 ebe = 0,46 eb;
» » 8 ebe = 0,36 eb.
Таблица 10
Нормы плавности работы (показатели fzkr или fzk0r)
|
Частота k циклической погрешности за оборот зубчатого колеса |
Делительный диаметр d, мм |
|||||||||||||
|
До 125 |
Св. 125 до 400 |
Св. 400 до 800 |
Св. 800 до 1600 |
Св. 1600 до 2500 |
Св. 2500 до 4000 |
Св. 4000 до 6300 |
||||||||
|
Модуль m, мм |
||||||||||||||
|
От 1 до 6,3 |
Св. 6,3 до 10 |
От 1 до 6,3 |
Св. 6,3 до 10 |
От 1 до 6,3 |
Св. 6,3 до 10 |
От 1 до 6,3 |
Св. 6,3 до 10 |
От 1 до 6,3 |
Св. 6,3 до 10 |
От 1 до 6,3 |
Св. 6,3 до 10 |
Св. 6,3 до 10 |
||
|
мкм |
||||||||||||||
|
3 |
От 2 до 4 |
2,8 |
3,4 |
4,2 |
4,5 |
5,3 |
6,0 |
5,6 |
7,1 |
6,7 |
7,5 |
7,1 |
8,0 |
9,5 |
|
Св. 4 ² 8 |
2,1 |
2,4 |
2,8 |
3,4 |
3,8 |
4,2 |
4,2 |
5,0 |
4,8 |
5,6 |
5,0 |
6,0 |
6,7 |
|
|
² 8 ² 16 |
1,6 |
1,8 |
2,2 |
2,5 |
2,8 |
3,2 |
3,2 |
3,8 |
3,6 |
4,2 |
4,0 |
4,5 |
5,0 |
|
|
² 16 ² 32 |
1,2 |
1,4 |
1,8 |
1,9 |
2,2 |
2,5 |
2,5 |
3,0 |
2,8 |
3,2 |
3,0 |
3,6 |
4,0 |
|
|
² 32 ² 63 |
1,0 |
1,2 |
1,4 |
1,6 |
1,8 |
2,1 |
2,1 |
2,4 |
2,2 |
2,6 |
2,5 |
2,8 |
3,2 |
|
|
² 63 ² 125 |
0,9 |
1,0 |
1,2 |
1,4 |
1,6 |
1,7 |
1,7 |
2,0 |
1,9 |
2,2 |
2,2 |
2,4 |
2,6 |
|
|
² 125 ² 250 |
0,8 |
0,9 |
1,1 |
1,2 |
1,4 |
1,5 |
1,5 |
1,8 |
1,7 |
2,0 |
1,9 |
2,2 |
2,4 |
|
|
² 250 ² 500 |
0,6 |
0,8 |
1,0 |
1,1 |
1.3 |
1,4 |
1,4 |
1,7 |
1,6 |
1,8 |
1,7 |
2,0 |
2,2 |
|
|
² 500 ² 1000 |
0,6 |
0,8 |
0,9 |
1,1 |
1,2 |
1,3 |
1,3 |
1,6 |
1,5 |
1,7 |
1,6 |
1,9 |
2,0 |
|
|
² 1000 |
0,6 |
0,8 |
0,9 |
1,0 |
1,1 |
1,2 |
1,2 |
1,5 |
1,4 |
1,6 |
1,5 |
1,8 |
2,2 |
|
|
4 |
От 2 до 4 |
4,5 |
5,3 |
6,3 |
7,1 |
8,5 |
9,0 |
9,0 |
11 |
10 |
12 |
11 |
13 |
15 |
|
Св. 4 ² 8 |
3,2 |
3,8 |
4,5 |
5,3 |
6,0 |
6,7 |
6,7 |
8,0 |
7,5 |
8,5 |
8 |
9,5 |
11 |
|
|
² 8 ² 16 |
2,4 |
2,8 |
3,4 |
4,0 |
4,5 |
5,0 |
5,0 |
6,0 |
5,6 |
6,7 |
6,3 |
7,1 |
8,0 |
|
|
² 16 ² 32 |
1,9 |
2,2 |
2,8 |
3,0 |
3,6 |
3,8 |
4,0 |
4,8 |
4,5 |
5,0 |
4,8 |
5,6 |
6,3 |
|
|
² 32 ² 63 |
1,5 |
1,8 |
2,2 |
2,5 |
2,8 |
3,2 |
3,2 |
3,8 |
3,6 |
4,2 |
4,0 |
4,5 |
5,0 |
|
|
² 63 ² 125 |
1,3 |
1,5 |
1,9 |
2,1 |
2,5 |
2,6 |
2,6 |
3,2 |
3,0 |
3,6 |
3,4 |
3,8 |
4,2 |
|
|
² 125 ² 250 |
1,2 |
1,4 |
1,8 |
1,9 |
2,2 |
2,4 |
2,4 |
2,8 |
2,6 |
3,2 |
3,0 |
3,4 |
3,8 |
|
|
² 250 ² 500 |
1,1 |
1,2 |
1,5 |
1,7 |
2,0 |
2,2 |
2,2 |
2,6 |
2,5 |
2,8 |
2,8 |
3,2 |
3,4 |
|
|
² 500 ² 1000 |
1,0 |
1,2 |
1,4 |
1,6 |
1,8 |
2,0 |
2,0 |
2,5 |
2,2 |
2,6 |
2,6 |
3,0 |
3,2 |
|
|
² 1000 |
0,9 |
1,1 |
1,4 |
1,5 |
1,8 |
2,0 |
2,0 |
2,4 |
2,2 |
2,6 |
2,4 |
2,8 |
3,0 |
|
|
5 |
От 2 до 4 |
7,1 |
9,0 |
10 |
12 |
13 |
15 |
15 |
18 |
16 |
21 |
18 |
22 |
25 |
|
Св. 4 ² 8 |
5,0 |
6,7 |
7,5 |
9,0 |
9,5 |
11 |
11 |
13 |
12 |
15 |
13 |
16 |
18 |
|
|
² 8 ² 16 |
3,8 |
5,0 |
5,6 |
6,7 |
7,1 |
8,5 |
8,0 |
10 |
9,0 |
11 |
10 |
12 |
13 |
|
|
² 16 ² 32 |
3,0 |
3,8 |
4,5 |
5,3 |
5,6 |
6,3 |
6,3 |
8,0 |
7,1 |
9,0 |
7,5 |
9,5 |
11 |
|
|
² 32 ² 63 |
2,5 |
3,2 |
3,6 |
4,2 |
4,5 |
5,3 |
5,0 |
6,3 |
5,6 |
7,1 |
6,3 |
8,0 |
8,5 |
|
|
² 63 ² 125 |
2,1 |
2,6 |
3,0 |
3,6 |
3,8 |
4,5 |
4,5 |
5,6 |
4,8 |
6,0 |
5,3 |
6,7 |
7,1 |
|
|
² 125 ² 250 |
1,9 |
2.4 |
2,6 |
3,2 |
3,4 |
4,0 |
3,8 |
4,8 |
4,2 |
5,3 |
4,8 |
6,0 |
6,3 |
|
|
² 250 ² 500 |
1,7 |
2,2 |
2,4 |
3,0 |
3,2 |
3,6 |
3,6 |
4,5 |
4,0 |
5,0 |
4,2 |
5,3 |
6,0 |
|
|
² 500 ² 1000 |
1,6 |
2,0 |
2,2 |
2,8 |
2,8 |
3,4 |
3,2 |
4,2 |
3,6 |
4,5 |
4,0 |
5,0 |
5,6 |
|
|
² 1000 |
1,5 |
1,9 |
2,2 |
2,6 |
2,8 |
3,2 |
3,2 |
4,0 |
3,4 |
4,5 |
3,8 |
4,8 |
5,3 |
|
|
От 2 до 4 |
11 |
14 |
16 |
19 |
21 |
24 |
24 |
30 |
26 |
32 |
28 |
36 |
40 |
|
|
Св. 4 ² 8 |
8,0 |
10 |
12 |
14 |
15 |
17 |
17 |
21 |
19 |
24 |
21 |
26 |
28 |
|
|
² 8 ² 16 |
6,0 |
7,5 |
8,5 |
10,5 |
11 |
13 |
13 |
16 |
14 |
18 |
16 |
20 |
21 |
|
|
² 16 ² 32 |
4,8 |
6,0 |
6,7 |
8,0 |
9,0 |
10 |
10 |
13 |
11 |
14 |
12 |
15 |
17 |
|
|
² 32 ² 63 |
3,8 |
5,0 |
5,6 |
6,7 |
7,1 |
8,5 |
8,0 |
10 |
9,0 |
11 |
10 |
12 |
13 |
|
|
² 63 ² 125 |
3,2 |
4,2 |
4,8 |
5,6 |
6,0 |
7,1 |
7,1 |
8,5 |
7,5 |
9,5 |
8,5 |
10 |
11 |
|
|
² 125 ² 250 |
3,0 |
3,6 |
4,2 |
5,0 |
5,3 |
6,3 |
6,0 |
7,5 |
6,7 |
8,5 |
7,5 |
9,0 |
10 |
|
|
² 250 ² 500 |
2,6 |
3,4 |
3,8 |
4,5 |
5,0 |
5,6 |
5,6 |
7,1 |
6,3 |
8,0 |
6,7 |
8,5 |
9,5 |
|
|
² 500 ² 1000 |
2,5 |
3,2 |
3,6 |
4,2 |
4,5 |
5,3 |
5,3 |
6,7 |
5,6 |
7,5 |
6,3 |
8,0 |
8,5 |
|
|
² 1000 |
2,4 |
3,0 |
3,4 |
4,0 |
4,5 |
5,0 |
5,0 |
6,3 |
5,6 |
7,1 |
6,0 |
7,5 |
8,5 |
|
|
7 |
От 2 до 4 |
18 |
22 |
26 |
30 |
32 |
38 |
36 |
48 |
40 |
53 |
45 |
56 |
60 |
|
Св. 4 ² 8 |
13 |
16 |
18 |
22 |
24 |
28 |
26 |
34 |
30 |
38 |
32 |
40 |
45 |
|
|
² 8 ² 16 |
9,5 |
12 |
14 |
16 |
18 |
21 |
20 |
25 |
22 |
28 |
24 |
30 |
34 |
|
|
² 16 ² 32 |
7,5 |
9,5 |
11 |
13 |
14 |
16 |
16 |
20 |
18 |
22 |
19 |
24 |
26 |
|
|
² 32 ² 63 |
6,0 |
8,0 |
9,0 |
10 |
12 |
14 |
13 |
16 |
14 |
18 |
16 |
20 |
21 |
|
|
² 63 ² 125 |
5,3 |
6,7 |
7,5 |
9,0 |
9,5 |
11 |
11 |
14 |
12 |
15 |
13 |
16 |
18 |
|
|
² 125 ² 250 |
4,5 |
6,0 |
6,7 |
8,0 |
8,5 |
10 |
9,5 |
12 |
11 |
13 |
12 |
15 |
16 |
|
|
² 250 ² 500 |
4,2 |
5,3 |
6,0 |
7,1 |
8,0 |
9 |
9,0 |
11 |
10,0 |
12 |
11 |
13 |
15 |
|
|
² 500 ² 1000 |
4,0 |
5,0 |
5,6 |
6,7 |
7,1 |
8,5 |
8,5 |
10 |
9,0 |
11 |
10 |
12 |
14 |
|
|
² 1000 |
3,8 |
4,8 |
5,3 |
6,3 |
6,7 |
8,0 |
8,0 |
10 |
8,5 |
11 |
9,5 |
12 |
13 |
|
|
8 |
От 2 до 4 |
25 |
32 |
36 |
42 |
45 |
53 |
53 |
63 |
56 |
75 |
63 |
80 |
85 |
|
Св. 4 ² 8 |
18 |
22 |
26 |
30 |
34 |
38 |
38 |
48 |
42 |
53 |
45 |
56 |
63 |
|
|
² 8 ² 16 |
14 |
17 |
20 |
22 |
25 |
28 |
28 |
36 |
32 |
40 |
34 |
42 |
48 |
|
|
² 16 ² 32 |
11 |
13 |
15 |
18 |
20 |
22 |
22 |
28 |
25 |
34 |
28 |
34 |
36 |
|
|
² 32 ² 63 |
8,5 |
11 |
12 |
15 |
16 |
18 |
18 |
22 |
20 |
26 |
22 |
28 |
30 |
|
|
² 63 ² 125 |
7,1 |
9,5 |
10 |
12 |
14 |
16 |
15 |
19 |
17 |
22 |
19 |
24 |
25 |
|
|
² 125 ² 250 |
6,7 |
8,0 |
9,5 |
11 |
12 |
14 |
13 |
17 |
15 |
20 |
17 |
20 |
22 |
|
|
² 250 ² 500 |
6,0 |
7,5 |
8,5 |
10 |
11 |
13 |
12 |
16 |
14 |
18 |
15 |
19 |
21 |
|
|
² 500 ² 1000 |
5,6 |
7,1 |
8,0 |
9,5 |
10 |
12 |
11 |
15 |
13 |
16 |
14 |
18 |
19 |
|
|
² 1000 |
5,3 |
6,7 |
7,5 |
9,0 |
10 |
11 |
11 |
14 |
12 |
15 |
13 |
17 |
18 |
|
Примечания:
1. Принятые обозначения:
fzk - допуск на циклическую погрешность зубчатого колеса;
fzk0 - допуск на циклическую погрешность передачи.
2. При контроле зубчатой передачи частота k принимается по колесу передачи. При контроле с измерительным зубчатым колесом частота k принимается по контролируемому зубчатому колесу.
3. Нормы на циклические погрешности, частота которых k равна или менее передаточного числа и, не устанавливаются.
Таблица 11
Нормы контакта зубьев (показатели FPxnr, Fkr, Fbr, fxr, fyr)
|
Обозначение |
Модуль m, мм |
Ширина зубчатого венца (полушеврона) или длина контактной линии, им |
||||||||
|
До 40 |
Св. 40 до 100 |
Св. 100 до 160 |
Св. 160 до 250 |
Св. 250 до 400 |
Св. 400 до 630 |
Св. 630 до 1000 |
Св. 1000 до 1250 |
|||
|
мкм |
||||||||||
|
3 |
FPxn |
От 1 до 10 |
±6,3 |
±7,1 |
±8 |
±10 |
±12 |
±16 |
±20 |
±25 |
|
Fk |
От 1 до 3,5 |
8 |
9 |
10 |
11 |
12 |
- |
- |
- |
|
|
Св. 3,5 » 6,3 |
10 |
11 |
12 |
12 |
14 |
16 |
- |
- |
||
|
» 6,3 » 10 |
12 |
12 |
14 |
14 |
16 |
18 |
22 |
28 |
||
|
Fb |
От 1 до 10 |
4,5 |
6 |
8 |
10 |
11 |
14 |
16 |
20 |
|
|
fx |
От 1 до 10 |
4,5 |
6 |
8 |
10 |
11 |
14 |
16 |
20 |
|
|
fy |
От 1 до 10 |
2,2 |
3 |
4 |
5 |
5,6 |
7,1 |
8 |
10 |
|
|
4 |
FPxn |
От 1 до 10 |
±8 |
±10 |
±11 |
±12 |
±16 |
±20 |
±25 |
±36 |
|
Fk |
От 1 до 3,5 |
11 |
12 |
14 |
14 |
16 |
- |
- |
- |
|
|
Св. 3,5 » 6,3 |
12 |
14 |
14 |
16 |
18 |
22 |
- |
- |
||
|
» 6,3 » 10 |
14 |
16 |
16 |
18 |
20 |
24 |
28 |
32 |
||
|
Fb |
От 1 до 10 |
5,5 |
8 |
10 |
12 |
14 |
18 |
22 |
25 |
|
|
fx |
От 1 до 10 |
5,5 |
8 |
10 |
12 |
14 |
18 |
22 |
25 |
|
|
fy |
От 1 до 10 |
2,8 |
4 |
5 |
6 |
7,1 |
9 |
11 |
12 |
|
|
5 |
FPxn |
От 1 до 16 |
±11 |
±12 |
±14 |
±16 |
±20 |
±25 |
±32 |
±45 |
|
Fk |
От 1 до 3,5 |
14 |
16 |
16 |
18 |
20 |
- |
- |
- |
|
|
Св. 3,5 » 6,3 |
16 |
18 |
20 |
20 |
25 |
28 |
- |
- |
||
|
» 6,3 » 10 |
20 |
20 |
22 |
22 |
25 |
30 |
36 |
45 |
||
|
» 10 » 16 |
- |
25 |
25 |
28 |
30 |
36 |
40 |
50 |
||
|
Fb |
От 1 до 16 |
7 |
10 |
12 |
16 |
18 |
22 |
25 |
30 |
|
|
fx |
От 1 до 16 |
7 |
10 |
12 |
16 |
18 |
22 |
25 |
30 |
|
|
fy |
От 1 до 16 |
4 |
5 |
6,3 |
8 |
9 |
11 |
12 |
16 |
|
|
6 |
FPxn |
От 1 до 16 |
±12 |
±14 |
±16 |
±20 |
±25 |
±30 |
±40 |
±50 |
|
Fk |
От 1 до 3,5 |
18 |
20 |
22 |
25 |
28 |
- |
- |
- |
|
|
Св. 3,5 » 6,3 |
20 |
22 |
25 |
25 |
30 |
36 |
- |
- |
||
|
» 6,3 » 10 |
25 |
25 |
28 |
30 |
32 |
40 |
45 |
56 |
||
|
» 10 » 16 |
- |
30 |
32 |
36 |
40 |
45 |
50 |
60 |
||
|
Fb |
От 1 до 16 |
9 |
12 |
16 |
20 |
25 |
28 |
32 |
40 |
|
|
fx |
От 1 до 16 |
9 |
12 |
16 |
20 |
25 |
28 |
32 |
40 |
|
|
fy |
От 1 до 16 |
4,5 |
6,3 |
8 |
10 |
12 |
14 |
16 |
20 |
|
|
7 |
FPxn |
От 1 до 25 |
±16 |
±18 |
±20 |
±25 |
±32 |
±40 |
±50 |
±63 |
|
Fk |
От 1 до 3,5 |
22 |
25 |
28 |
30 |
32 |
- |
- |
- |
|
|
Св. 3,5 » 6,3 |
25 |
28 |
30 |
32 |
36 |
45 |
- |
- |
||
|
» 6,3 » 10 |
30 |
32 |
36 |
40 |
45 |
50 |
56 |
71 |
||
|
» 10 » 16 |
- |
40 |
40 |
45 |
50 |
56 |
63 |
80 |
||
|
» 16 » 25 |
- |
50 |
50 |
56 |
60 |
63 |
71 |
90 |
||
|
Fb |
От 1 до 25 |
11 |
16 |
20 |
25 |
28 |
32 |
40 |
50 |
|
|
fx |
От 1 до 25 |
11 |
16 |
20 |
25 |
28 |
32 |
40 |
50 |
|
|
fy |
От 1 до 25 |
5,6 |
8 |
10 |
12 |
14 |
16 |
20 |
25 |
|
|
8 |
FPxn |
От 1 до 40 |
±25 |
±28 |
±32 |
±40 |
±45 |
±60 |
- |
- |
|
Fk |
От 1 до 3,5 |
36 |
40 |
40 |
45 |
50 |
- |
- |
- |
|
|
Св. 3,5 » 6,3 |
40 |
45 |
50 |
50 |
56 |
71 |
- |
- |
||
|
» 6,3 » 10 |
45 |
50 |
56 |
60 |
63 |
80 |
- |
- |
||
|
» 10 » 16 |
- |
60 |
63 |
71 |
80 |
90 |
- |
- |
||
|
» 16 » 25 |
- |
80 |
80 |
90 |
90 |
100 |
- |
- |
||
|
» 25 » 40 |
- |
- |
112 |
112 |
125 |
125 |
- |
- |
||
|
Fb |
От 1 до 40 |
18 |
25 |
32 |
40 |
45 |
56 |
- |
- |
|
|
fx |
От 1 до 40 |
18 |
25 |
32 |
40 |
45 |
56 |
- |
- |
|
|
fy |
От 1 до 40 |
9 |
12 |
16 |
20 |
22 |
28 |
- |
- |
|
|
9 |
FPxn |
От 1 до 55 |
±40 |
±45 |
±50 |
±60 |
±71 |
±90 |
||
|
Fk |
От 1 до 3,5 |
56 |
60 |
60 |
71 |
80 |
- |
|||
|
Св. 3,5 » 6,3 |
63 |
71 |
80 |
80 |
90 |
112 |
||||
|
» 6,3 » 10 |
80 |
80 |
90 |
90 |
100 |
125 |
||||
|
» 10 » 16 |
- |
100 |
100 |
112 |
125 |
140 |
||||
|
» 16 » 25 |
- |
125 |
125 |
140 |
140 |
160 |
||||
|
» 25 » 40 |
- |
- |
180 |
180 |
180 |
200 |
||||
|
» 40 » 55 |
- |
- |
- |
224 |
250 |
250 |
||||
|
Fb |
От 1 до 55 |
28 |
40 |
50 |
63 |
71 |
90 |
|||
|
fx |
От 1 до 55 |
28 |
40 |
50 |
63 |
71 |
90 |
|||
|
fy |
От 1 до 55 |
14 |
20 |
25 |
30 |
36 |
45 |
|||
|
10 |
Fk |
От 1 до 3,5 |
90 |
100 |
100 |
112 |
125 |
- |
||
|
Св. 3,5 » 6,3 |
100 |
112 |
112 |
125 |
140 |
180 |
||||
|
» 6,3 » 10 |
125 |
125 |
140 |
140 |
160 |
200 |
||||
|
» 10 » 16 |
- |
160 |
160 |
180 |
200 |
224 |
||||
|
» 16 » 25 |
- |
200 |
200 |
224 |
224 |
250 |
||||
|
» 25 » 40 |
- |
- |
280 |
280 |
315 |
315 |
||||
|
» 40 » 55 |
- |
- |
- |
355 |
400 |
400 |
||||
|
Fb |
От 1 до 55 |
45 |
63 |
80 |
100 |
112 |
140 |
|||
|
fx |
От 1 до 55 |
45 |
63 |
80 |
100 |
112 |
140 |
|||
|
fy |
От 1 до 55 |
22 |
32 |
40 |
50 |
56 |
71 |
|||
|
11 |
Fk |
От 1 до 3,5 |
140 |
160. |
160 |
180 |
200 |
- |
||
|
Св. 3,5 » 6,3 |
160 |
180 |
180 |
200 |
224 |
280 |
||||
|
» 6,3 » 10 |
200 |
200 |
224 |
224 |
250 |
315 |
||||
|
» 10 » 16 |
- |
250 |
250 |
280 |
315 |
355 |
||||
|
» 16 » 25 |
- |
315 |
315 |
355 |
355 |
400 |
||||
|
» 25 » 40 |
- |
- |
450 |
450 |
500 |
500 |
||||
|
» 40 » 55 |
- |
- |
- |
560 |
630 |
630 |
||||
|
Fb |
От 1 до 55 |
71 |
109 |
125 |
160 |
180 |
224 |
|||
|
fx |
От 1 до 55 |
71 |
100 |
125 |
160 |
180 |
224 |
|||
|
fy |
От 1 до 55 |
36 |
50 |
63 |
80 |
90 |
112 |
|||
|
12 |
Fk |
От 1 до 3,5 |
224 |
250 |
250 |
280 |
315 |
- |
||
|
Св. 3,5 » 6,3 |
350 |
280 |
280 |
315 |
355 |
450 |
||||
|
» 6,3 » 10 |
315 |
315 |
355 |
355 |
400 |
500 |
||||
|
» 10 » 16 |
- |
355 |
400 |
450 |
500 |
560 |
||||
|
» 16 » 25 |
- |
500 |
500 |
560 |
560 |
630 |
||||
|
» 25 » 40 |
- |
- |
630 |
710 |
710 |
800 |
||||
|
» 40 » 55 |
- |
- |
- |
900 |
1000 |
1000 |
||||
|
Fb |
От 1 до 55 |
112 |
160 |
200 |
250 |
280 |
355 |
|||
|
fx |
От 1 до 55 |
112 |
160 |
200 |
250 |
280 |
355 |
|||
|
fy |
От 1 до 55 |
56 |
80 |
100 |
125 |
140 |
180 |
|||
Примечания:
1. Принятые обозначения:
±FPxn - продольные отклонения осевых шагов по нормали;
Fk - допуск на суммарную погрешность контактной линии;
Fb - допуск на направление зуба;
fх - допуск параллельности осей;
fy - допуск на перекос осей.
2. Fk определяется в зависимости от длины контактной линии. Для зубчатых колес с номинальным коэффициентом осевого перекрытия eb до 0,8 допуск на суммарную погрешность контактной линии Fk принимается:
при eb от 0 до 0,2 Fk = Fb;
» eb св. 0,2 » 0,4 Fk = 1,3Fb;
» eb » 0,4 » 0,6 Fk = 1,5Fb;
» eb » 0,6 » 0,8 Fk = 1,7Fb.
Если вычисленные значения Fk превышают значения Fk, установленные в табл. 11, то они принимаются по указанной таблице. Значения Fb принимаются по табл. 11.
3. FРхn, Fb, fх, fy определяются в зависимости от ширины зубчатого венца (полушеврона).
4. При использовании отклонения шага зацепления fPbr в качестве показателя контакта зубьев предельные отклонения выбираются по табл. 8 в соответствии со степенью точности, принятой по нормам контакта.
Таблица 12
Нормы контакта зубьев в передаче (суммарное пятно контакта)
|
Относительные размеры суммарного пятна контакта в процентах |
||
|
по высоте зубьев, не менее |
по длине зубьев, не менее |
|
|
3 |
65 |
95 |
|
4 |
60 |
90 |
|
5 |
55 |
80 |
|
6 |
50 |
70 |
|
7 |
45 |
60 |
|
8 |
40 |
50 |
|
9 |
30 |
40 |
|
10 |
25 |
30 |
|
11 |
20 |
25 |
Примечания:
1. Для передачи 7 - 11 степеней точности с числом зубьев колеса не равным и не кратным числу зубьев шестерни, допускается уменьшение относительных размеров мгновенного пятна контакта зубьев. Предельные относительные размеры мгновенного пятна контакта зубьев в этом случае не должны быть менее 75 % соответствующих предельных относительных размеров суммарного пятна контакта.
2. Если не указаны специальные требования по нагрузке (торможению) зубчатой передачи, пятно контакта устанавливают при легком торможении, обеспечивающем непрерывное контактирование зубьев обоих зубчатых колес.
3. При контроле с измерительным зубчатым колесом относительные размеры суммарного пятна контакта должны быть соответственно увеличены по сравнению с указанными в табл. 12.
Каждый установленный комплекс показателей, используемый при приемке зубчатых колес и передач, является равноправным с другими. При сравнительной (например расчетной) оценке влияния точности передач на их эксплуатационные качества предпочтительными являются функциональные показатели: F¢i0r, fzz0r, fzk0r и суммарное пятно контакта.
2.8. Непосредственный контроль зубчатых колес и передач по всем показателям установленного комплекса не является обязательным, если изготовитель существующей у него системой контроля точности производства гарантирует выполнение соответствующих требований настоящего стандарта.
2.9. Точностные требования установлены настоящим стандартом для зубчатых колес, находящихся на рабочих осях.
На чертеже требования к точности зубчатого колеса допускается устанавливать относительно другой оси (например оси отверстия под вал), которая может не совпадать с рабочей осью.
Погрешности, вносимые при использовании в качестве измерительной базы поверхностей, имеющих неточности формы и расположения относительно рабочей оси, должны быть учтены при установлении точности передачи или компенсированы введением уменьшенного производственного допуска.
2.10. В тех случаях, когда взаимозаменяемость не является обязательной, допускается принимать за номинальные следующие элементы одного из зубчатых колес:
1) среднее значение действительного осевого шага или среднее значение действительного угла наклона линии зуба;
2) среднее значение действительного шага зацепления;
3) действительное дополнительное смещение исходного контура (или действительное уменьшение средней длины общей нормали, или действительное уменьшение толщины зуба).
При этом дополнительное смещение исходного контура (или уменьшение средней длины общей нормали, или уменьшение толщины зуба) второго зубчатого колеса определяется наименьшим действительным дополнительным смещением исходного контура (наименьшим действительным уменьшением средней длины общей нормали или наименьшим уменьшением толщины зуба) на первом зубчатом колесе и выбранным видом сопряжения (бокового зазора в передаче).
3. НОРМЫ БОКОВОГО ЗАЗОРА
3.1. Величины гарантированного бокового зазора jnmin для различных видов сопряжений устанавливаются по табл. 13 независимо от степеней точности зубчатых колес и передач и их комбинирования.
3.2. Показателями, обеспечивающими гарантированный боковой зазор, являются: для зубчатых колес - EHs или EWms, или EWs, или Есs, или Еa¢¢s; для передач с нерегулируемым расположением осей - fаr, а для передач с регулируемым расположением - jnmin.
3.3. Наименьшее дополнительное смещение исходного контура EHs устанавливается по табл. 14 (или наименьшее отклонение средней длины общей нормали EWms - по табл. 16 и 17, или наименьшее отклонение длины общей нормали EWs - по табл. 16, или наименьшее отклонение толщины зуба Еcs - по табл. 20, или верхнее предельное отклонение измерительного межосевого расстояния Еa¢¢s - по табл. 22) в зависимости от вида сопряжения и степени точности по нормам плавности работы.
3.4. Допуск на смещение исходного контура ТH устанавливается по табл. 15 (или допуск на среднюю длину общей нормали ТWm - по табл. 18, или допуск на длину общей нормали TW - по табл. 19, или допуск на толщину зуба Тс - по табл. 21, или нижнее предельное отклонение измерительного межосевого расстояния Еa¢¢l - по табл. 22) в зависимости от вида сопряжения или вида допуска на боковой зазор, если он указан в условном обозначении передачи (см. п. 19).
Таблица 13
Нормы бокового зазора (показатели jnmin, fаr)
|
Класс отклонения межосевого расстояния* |
Обозначение |
Межосевое расстояние аw, мм |
||||||||||||||||
|
До 80 |
Св. 80 до 125 |
Св. 125 до 180 |
Св. 180 до 250 |
Св. 250 до 315 |
Св. 315 до 400 |
Св. 400 до 500 |
Св. 500 до 630 |
Св. 630 до 800 |
Св. 800 до 1000 |
Св. 1000 до 1250 |
Св. 1250 до 1600 |
Св. 1600 до 2000 |
Св. 2000 до 2500 |
Св. 2500 до 3150 |
Св. 3150 до 4000 |
|||
|
мкм |
||||||||||||||||||
|
Н |
II |
jnmin |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
|
Е |
II |
30 |
35 |
40 |
46 |
52 |
57 |
63 |
70 |
80 |
90 |
105 |
125 |
150 |
175 |
210 |
260 |
|
|
D |
III |
46 |
54 |
63 |
72 |
81 |
89 |
97 |
110 |
125 |
140 |
165 |
195 |
230 |
280 |
330 |
410 |
|
|
С |
IV |
74 |
87 |
100 |
115 |
130 |
140 |
155 |
175 |
200 |
230 |
260 |
310 |
370 |
440 |
540 |
660 |
|
|
В |
V |
120 |
140 |
160 |
185 |
210 |
230 |
250 |
280 |
320 |
360 |
420 |
500 |
600 |
700 |
860 |
1050 |
|
|
А |
VI |
190 |
220 |
250 |
290 |
320 |
360 |
400 |
440 |
500 |
560 |
660 |
780 |
920 |
1100 |
1350 |
1650 |
|
|
- |
I |
fa |
±10 |
±11 |
±12 |
±14 |
±16 |
±18 |
±20 |
±22 |
±25 |
±28 |
±35 |
±40 |
±45 |
±55 |
±70 |
±90 |
|
Н, Е |
II |
±16 |
±18 |
±20 |
±22 |
±25 |
±28 |
±30 |
±35 |
±40 |
±45 |
±50 |
±60 |
±70 |
±90 |
±110 |
±140 |
|
|
D |
III |
±22 |
±28 |
±30 |
±35 |
±40 |
±45 |
±50 |
±55 |
±60 |
±70 |
±80 |
±100 |
±110 |
±140 |
±160 |
±200 |
|
|
С |
IV |
±35 |
±45 |
±50 |
±55 |
±60 |
±70 |
±80 |
±90 |
±100 |
±110 |
±140 |
±160 |
±180 |
±220 |
±280 |
±350 |
|
|
В |
V |
±60 |
±70 |
±80 |
±90 |
±100 |
±110 |
±120 |
±140 |
±160 |
±180 |
±220 |
±250 |
±300 |
±350 |
±450 |
±550 |
|
|
А |
VI |
±100 |
±110 |
±120 |
±140 |
±160 |
±180 |
±200 |
±220 |
±250 |
±280 |
±350 |
±400 |
±450 |
±550 |
±700 |
±800 |
|
* Класс отклонений межосевого расстояния используется при изменении соответствия между видом сопряжения и классом отклонения межосевого расстояния (см. пп. 1.7 и 1.10).
Примечание. Принятые обозначения:
jnmin - гарантированный боковой зазор;
±fa - предельные отклонения межосевого расстояния.
Таблица 14
Нормы бокового зазора (показатель -EHs для зубчатого колеса с внешними зубьями, показатель +ЕHi для зубчатого колеса с внутренними зубьями)
|
Степень точности по нормам плавности |
Делительный диаметр d, мм |
||||||||||||||||||
|
До 80 |
Св. 80 до 125 |
Св. 125 до 180 |
Св. 180 до 250 |
Св. 250 до 315 |
Св. 315 до 400 |
Св. 400 до 500 |
Св. 500 до 630 |
Св. 630 до 800 |
Св. 800 до 1000 |
Св. 1000 до 1250 |
Св. 1250 до 1600 |
Св. 1600 до 2000 |
Св. 2000 до 2500 |
Св. 2500 до 3150 |
Св. 3150 до 4000 |
Св. 4000 до 5000 |
Св. 5000 до 6300 |
||
|
мкм |
|||||||||||||||||||
|
Н |
3 - 6 |
12 |
14 |
16 |
18 |
20 |
22 |
25 |
28 |
30 |
40 |
45 |
50 |
60 |
70 |
80 |
100 |
120 |
160 |
|
7 |
14 |
16 |
18 |
20 |
22 |
25 |
28 |
30 |
35 |
45 |
50 |
55 |
70 |
80 |
90 |
110 |
140 |
180 |
|
|
Е |
3 - 6 |
30 |
35 |
40 |
46 |
52 |
57 |
63 |
70 |
80 |
90 |
105 |
125 |
150 |
175 |
210 |
260 |
320 |
400 |
|
7 |
35 |
40 |
45 |
50 |
55 |
60 |
70 |
80 |
90 |
100 |
120 |
140 |
160 |
200 |
240 |
280 |
350 |
450 |
|
|
D |
3 - 6 |
46 |
54 |
63 |
72 |
81 |
89 |
97 |
110 |
125 |
140 |
165 |
195 |
230 |
280 |
330 |
410 |
500 |
620 |
|
7 |
50 |
60 |
70 |
80 |
90 |
100 |
110 |
120 |
140 |
160 |
180 |
220 |
250 |
300 |
350 |
450 |
550 |
700 |
|
|
8 |
55 |
70 |
80 |
90 |
100 |
110 |
120 |
140 |
160 |
180 |
200 |
250 |
280 |
350 |
400 |
500 |
600 |
750 |
|
|
С |
3 - 6 |
74 |
87 |
100 |
115 |
130 |
140 |
155 |
175 |
200 |
230 |
260 |
310 |
370 |
440 |
540 |
660 |
800 |
980 |
|
7 |
80 |
100 |
110 |
120 |
140 |
160 |
180 |
200 |
220 |
250 |
280 |
350 |
400 |
450 |
600 |
700 |
900 |
1100 |
|
|
8 |
90 |
110 |
120 |
140 |
160 |
180 |
200 |
220 |
250 |
280 |
300 |
400 |
450 |
500 |
600 |
800 |
1000 |
1200 |
|
|
9 |
100 |
120 |
140 |
160 |
180 |
200 |
200 |
250 |
280 |
300 |
350 |
450 |
500 |
600 |
700 |
900 |
1000 |
1200 |
|
|
В |
3 - 6 |
120 |
140 |
160 |
185 |
210 |
230 |
250 |
280 |
320 |
360 |
420 |
500 |
600 |
700 |
860 |
1050 |
1300 |
1550 |
|
7 |
140 |
160 |
180 |
200 |
250 |
250 |
280 |
300 |
350 |
400 |
450 |
550 |
700 |
800 |
900 |
1100 |
1400 |
1800 |
|
|
8 |
140 |
160 |
200 |
220 |
250 |
280 |
300 |
350 |
400 |
450 |
500 |
600 |
700 |
800 |
1000 |
1200 |
1600 |
1800 |
|
|
9 |
160 |
180 |
200 |
250 |
280 |
300 |
350 |
400 |
400 |
450 |
550 |
700 |
800 |
900 |
1100 |
1400 |
1800 |
2000 |
|
|
10 |
160 |
200 |
220 |
250 |
300 |
350 |
350 |
400 |
450 |
500 |
600 |
700 |
800 |
1000 |
1200 |
1400 |
1800 |
2200 |
|
|
11 |
180 |
220 |
250 |
280 |
300 |
350 |
400 |
400 |
500 |
550 |
600 |
800 |
900 |
1100 |
1200 |
1600 |
2000 |
2400 |
|
|
А |
3 - 6 |
190 |
220 |
250 |
290 |
320 |
360 |
400 |
440 |
500 |
560 |
660 |
780 |
920 |
1100 |
1350 |
1650 |
2000 |
2500 |
|
7 |
200 |
250 |
280 |
300 |
350 |
400 |
450 |
500 |
550 |
600 |
700 |
900 |
1000 |
1200 |
1400 |
1800 |
2200 |
2800 |
|
|
8 |
220 |
280 |
300 |
350 |
400 |
450 |
500 |
550 |
600 |
700 |
800 |
900 |
1100 |
1400 |
1600 |
2000 |
2400 |
3000 |
|
|
9 |
250 |
280 |
350 |
400 |
400 |
500 |
500 |
600 |
700 |
800 |
900 |
1000 |
1200 |
1400 |
1800 |
2200 |
2500 |
3500 |
|
|
10 |
280 |
300 |
350 |
400 |
450 |
500 |
600 |
600 |
700 |
800 |
900 |
1100 |
1400 |
1600 |
1800 |
2200 |
2800 |
3500 |
|
|
11 |
280 |
350 |
400 |
450 |
500 |
550 |
600 |
700 |
800 |
900 |
1000 |
1200 |
1400 |
1600 |
2000 |
2500 |
3000 |
4000 |
|
|
12 |
300 |
350 |
450 |
500 |
500 |
600 |
700 |
700 |
800 |
900 |
1100 |
1200 |
1600 |
1800 |
2200 |
2800 |
3500 |
4000 |
|
Примечание. Принятые обозначения:
EHs - наименьшее дополнительное смещение исходного контура для зубчатого колеса с внешними зубьями (со знаком минус);
ЕHi - наименьшее дополнительное смещение исходного контура для зубчатого колеса с внутренними зубьями (со знаком плюс).
Таблица 15
Нормы
бокового зазора
(ТН - допуск на смещение исходного контура)
мкм
|
Вид допуска* |
Допуск на радиальное биение зубчатого венца Fr |
|||||||||||||||||||||
|
До 8 |
Св. 8 до 10 |
Св. 10 до 12 |
Св. 12 до 16 |
Св. 16 до 20 |
Св. 20 до 25 |
Св. 25 до 32 |
Св. 32 до 40 |
Св. 40 до 50 |
Св. 50 до 60 |
Св. 60 до 80 |
Св. 80 до 100 |
Св. 100 до 125 |
Св. 125 до 160 |
Св. 160 до 200 |
Св. 200 до 250 |
Св. 250 до 320 |
Св. 320 до 400 |
Св. 400 до 500 |
Св. 500 до 630 |
Св. 630 до 800 |
||
|
Н, Е |
h |
28 |
30 |
35 |
40 |
40 |
45 |
55 |
60 |
70 |
80 |
110 |
120 |
160 |
200 |
250 |
300 |
450 |
450 |
550 |
700 |
900 |
|
D |
d |
35 |
40 |
40 |
45 |
55 |
60 |
70 |
80 |
90 |
100 |
140 |
160 |
200 |
250 |
300 |
350 |
450 |
600 |
700 |
900 |
1200 |
|
С |
с |
45 |
50 |
55 |
60 |
70 |
80 |
90 |
100 |
120 |
140 |
180 |
200 |
250 |
300 |
400 |
500 |
600 |
700 |
900 |
1200 |
1400 |
|
В |
b |
55 |
60 |
70 |
70 |
80 |
90 |
100 |
120 |
140 |
180 |
200 |
250 |
300 |
400 |
500 |
600 |
700 |
900 |
1100 |
1400 |
1800 |
|
А |
а |
70 |
80 |
80 |
90 |
100 |
110 |
140 |
160 |
180 |
200 |
250 |
300 |
350 |
450 |
550 |
700 |
900 |
1100 |
1400 |
1600 |
2000 |
|
- |
z |
90 |
100 |
100 |
110 |
120 |
140 |
160 |
180 |
220 |
250 |
300 |
350 |
450 |
550 |
700 |
900 |
1100 |
1400 |
1600 |
2000 |
2500 |
|
- |
у |
110 |
120 |
140 |
140 |
160 |
180 |
200 |
250 |
280 |
350 |
400 |
500 |
600 |
700 |
900 |
1100 |
1400 |
1600 |
2000 |
2500 |
3500 |
|
- |
x |
140 |
160 |
160 |
180 |
200 |
220 |
250 |
300 |
350 |
400 |
500 |
600 |
700 |
900 |
1100 |
1400 |
1800 |
2000 |
2500 |
3000 |
4000 |
* Вид допуска на боковой зазор используется при изменении соответствия между видом сопряжения и видом допуска (см. пп. 1.6 и 1.9).
Примечание. Величина Fr устанавливается в соответствии с нормой кинематической точности по табл. 6.
Таблица 16
Нормы бокового зазора (показатели -EWms или +EWmi - слагаемое I и -EWs или +ЕWi)
|
Степень точности по нормам плавности |
Делительный диаметр d, мм |
||||||||||||
|
До 80 |
Св. 80 до 125 |
Св. 125 до 180 |
Св. 180 до 250 |
Св. 250 до 315 |
Св. 315 до 400 |
Св. 400 до 500 |
Св. 500 до 630 |
Св. 630 до 800 |
Св. 800 до 1000 |
Св. 1000 до 1250 |
Св. 1250 до 1600 |
||
|
мкм |
|||||||||||||
|
Н |
3 - 6 |
8 |
10 |
11 |
12 |
14 |
16 |
18 |
20 |
22 |
25 |
28 |
35 |
|
7 |
10 |
10 |
12 |
14 |
16 |
18 |
20 |
22 |
25 |
28 |
30 |
40 |
|
|
Е |
3 - 6 |
20 |
24 |
28 |
30 |
35 |
40 |
45 |
50 |
55 |
60 |
70 |
90 |
|
7 |
25 |
30 |
30 |
35 |
40 |
45 |
50 |
55 |
60 |
70 |
80 |
100 |
|
|
D |
3 - 6 |
30 |
35 |
40 |
50 |
55 |
60 |
70 |
70 |
90 |
100 |
110 |
140 |
|
7 |
35 |
40 |
50 |
55 |
60 |
70 |
70 |
80 |
100 |
110 |
120 |
160 |
|
|
8 |
40 |
50 |
50 |
60 |
70 |
70 |
80 |
90 |
110 |
120 |
140 |
180 |
|
|
С |
3 - 6 |
50 |
60 |
70 |
80 |
90 |
100 |
110 |
120 |
140 |
160 |
180 |
220 |
|
7 |
55 |
70 |
70 |
80 |
100 |
110 |
120 |
140 |
140 |
160 |
200 |
250 |
|
|
8 |
60 |
80 |
80 |
100 |
110 |
120 |
140 |
140 |
160 |
200 |
200 |
280 |
|
|
9 |
70 |
80 |
100 |
110 |
120 |
140 |
140 |
160 |
200 |
200 |
250 |
300 |
|
|
В |
3 - 6 |
80 |
100 |
110 |
120 |
140 |
160 |
180 |
200 |
220 |
250 |
280 |
350 |
|
7 |
100 |
110 |
120 |
140 |
180 |
180 |
200 |
200 |
250 |
280 |
300 |
400 |
|
|
8 |
100 |
110 |
140 |
140 |
180 |
200 |
200 |
250 |
280 |
300 |
350 |
400 |
|
|
9 |
110 |
120 |
140 |
160 |
200 |
200 |
250 |
280 |
300 |
300 |
350 |
500 |
|
|
10 |
110 |
140 |
160 |
180 |
200 |
250 |
250 |
280 |
350 |
350 |
400 |
500 |
|
|
11 |
120 |
160 |
180 |
200 |
200 |
250 |
280 |
280 |
350 |
350 |
400 |
500 |
|
|
А |
3 - 6 |
120 |
140 |
180 |
200 |
220 |
250 |
280 |
300 |
350 |
400 |
500 |
550 |
|
7 |
140 |
180 |
200 |
200 |
250 |
280 |
300 |
350 |
350 |
400 |
500 |
600 |
|
|
8 |
160 |
200 |
200 |
250 |
280 |
300 |
350 |
350 |
400 |
500 |
550 |
600 |
|
|
9 |
180 |
200 |
250 |
280 |
280 |
350 |
350 |
400 |
500 |
550 |
600 |
700 |
|
|
10 |
200 |
200 |
250 |
280 |
300 |
350 |
400 |
400 |
500 |
550 |
600 |
800 |
|
|
11 |
200 |
250 |
280 |
300 |
350 |
350 |
400 |
500 |
550 |
600 |
700 |
800 |
|
|
12 |
200 |
250 |
300 |
350 |
350 |
400 |
500 |
500 |
550 |
600 |
800 |
800 |
|
Примечание. Принятые обозначения:
EWms - наименьшее отклонение средней длины общей нормали (слагаемое I) для зубчатого колеса с внешними зубьями (со знаком минус);
EWs - наименьшее отклонение длины общей нормали для зубчатого колеса с внешними зубьями (со знаком минус);
EWmi - наименьшее отклонение средней длины общей нормали (слагаемое I) для зубчатого колеса с внутренними зубьями (со знаком плюс);
EWi - наименьшее отклонение длины общей нормали для зубчатого колеса с внутренними зубьями (со знаком плюс).
Таблица 17
Нормы
бокового зазора
(показатель -EWms или +EVmi -
слагаемое II)
мкм
|
До 8 |
Св. 8 до 10 |
Св. 10 до 12 |
Св. 12 до 16 |
Св. 16 до 20 |
Св. 20 до 25 |
Св. 25 до 32 |
Св. 32 до 40 |
Св. 40 до 50 |
Св. 50 до 60 |
Св. 60 до 80 |
Св. 80 до 100 |
Св. 100 до 125 |
Св. 125 до 160 |
Св. 160 до 200 |
Св. 200 до 250 |
Св. 250 до 320 |
Св. 320 до 400 |
Св. 400 до 500 |
Св. 500 до 630 |
Св. 630 до 800 |
|
2 |
2 |
3 |
3 |
4 |
5 |
7 |
9 |
11 |
14 |
18 |
22 |
25 |
35 |
45 |
55 |
70 |
90 |
110 |
140 |
180 |
Примечания:
1. Принятые обозначения:
EWms - наименьшее отклонение средней длины общей нормали (слагаемое II) для зубчатого колеса с внешними зубьями (со знаком минус);
EWmi - наименьшее отклонение средней длины общей нормали (слагаемое II) для зубчатого колеса с внутренними зубьями (со знаком плюс).
2. Величина наименьшего отклонения средней длины общей нормали EWms (EWmi) определяется сложением слагаемого I (табл. 16) со слагаемым II (табл. 17).
Например, величина EWms для колеса 8-й степени точности с d = 300 мм, m = 5 мм, сопряжения С будет равна: по табл. 16 - 110 мкм и по табл. 17 - 18 мкм.
Таким образом, EWms = (-110) + (-18) = -128 мкм (или EWmi = +128 мкм). Величина наименьшего отклонения длины общей нормали EWs определяется по табл. 16. Эта величина равна -110 мкм.
Таблица 18
Нормы
бокового зазора
(TWm - допуск на
среднюю длину общей нормали)
мкм
|
Вид допуска* |
Допуск на радиальное биение зубчатого венца Fr |
|||||||||||||||||||||
|
До 8 |
Св. 8 до 10 |
Св. 10 до 12 |
Св. 12 до 16 |
Св. 16 до 20 |
Св. 20 до 25 |
Св. 25 до 32 |
Св. 82 до 40 |
Св. 40 до 50 |
Св. 50 до 60 |
Св. 60 до 80 |
Св. 80 до 100 |
Св. 100 до 125 |
Св. 125 до 160 |
Св. 160 до 200 |
Св. 200 до 250 |
Св. 250 до 320 |
Св. 320 до 400 |
Св. 400 до 500 |
Св. 500 до 630 |
Св. 630 до 800 |
||
|
Н, Е |
h |
16 |
16 |
18 |
20 |
20 |
20 |
22 |
25 |
25 |
28 |
30 |
40 |
55 |
70 |
80 |
100 |
100 |
140 |
160 |
200 |
280 |
|
D |
d |
20 |
25 |
25 |
25 |
28 |
30 |
35 |
40 |
40 |
40 |
60 |
70 |
80 |
100 |
120 |
140 |
160 |
240 |
250 |
350 |
500 |
|
С |
с |
28 |
30 |
30 |
35 |
40 |
45 |
45 |
50 |
60 |
70 |
90 |
110 |
120 |
140 |
180 |
240 |
280 |
300 |
400 |
550 |
600 |
|
В |
b |
35 |
40 |
40 |
40 |
45 |
50 |
55 |
60 |
70 |
100 |
100 |
120 |
140 |
200 |
250 |
300 |
350 |
450 |
550 |
700 |
900 |
|
А |
а |
45 |
50 |
50 |
55 |
60 |
60 |
80 |
90 |
100 |
110 |
140 |
150 |
180 |
240 |
280 |
350 |
450 |
550 |
700 |
800 |
1000 |
|
- |
z |
60 |
60 |
60 |
70 |
70 |
80 |
100 |
110 |
120 |
140 |
180 |
200 |
250 |
300 |
400 |
500 |
600 |
800 |
800 |
1100 |
1400 |
|
- |
y |
70 |
80 |
90 |
90 |
100 |
110 |
120 |
160 |
180 |
220 |
240 |
300 |
350 |
400 |
500 |
600 |
800 |
900 |
1100 |
1400 |
2000 |
|
- |
x |
90 |
100 |
100 |
110 |
120 |
140 |
160 |
180 |
220 |
250 |
300 |
350 |
400 |
550 |
700 |
800 |
1100 |
1200 |
1400 |
1800 |
2400 |
* Вид допуска на боковой зазор используется при изменении соответствия между видом сопряжения и видом допуска (см. пп. 1.6 и 1.9).
Примечание. Величина Fr устанавливается в соответствии с нормой кинематической точности по табл. 6.
Таблица 19
Нормы
бокового зазора
(TW - допуск на длину
общей нормали)
мкм
|
Вид допуска* |
Допуск на радиальное биение зубчатого венда Fr |
|||||||||||||||||||||
|
До 8 |
Св. 8 до 10 |
Св. 10 до 12 |
Св. 12 до 16 |
Св. 16 до 20 |
Св. 20 до 25 |
Св. 25 до 32 |
Св. 32 до 40 |
Св. 40 до 50 |
Св. 50 до 60 |
Св. 60 до 80 |
Св. 80 до 100 |
Св. 100 до 125 |
Св. 125 до 160 |
Св. 160 до 200 |
Св. 200 до 250 |
Св. 250 до 320 |
Св. 320 до 400 |
Св. 400 до 500 |
Св. 500 до 630 |
Св. 630 до 800 |
||
|
Н, Е |
h |
20 |
20 |
25 |
28 |
28 |
30 |
35 |
40 |
50 |
60 |
70 |
80 |
100 |
140 |
160 |
200 |
250 |
300 |
400 |
450 |
600 |
|
D |
d |
25 |
28 |
28 |
30 |
35 |
40 |
50 |
55 |
60 |
70 |
100 |
110 |
140 |
180 |
200 |
250 |
300 |
400 |
500 |
600 |
700 |
|
С |
с |
35 |
35 |
35 |
40 |
50 |
55 |
60 |
70 |
80 |
100 |
120 |
140 |
180 |
200 |
280 |
350 |
400 |
500 |
600 |
700 |
1000 |
|
В |
b |
35 |
40 |
50 |
50 |
55 |
60 |
70 |
80 |
100 |
120 |
140 |
180 |
200 |
280 |
350 |
400 |
500 |
600 |
700 |
1000 |
1200 |
|
А |
а |
50 |
55 |
55 |
60 |
70 |
80 |
100 |
110 |
120 |
140 |
180 |
200 |
250 |
300 |
350 |
500 |
600 |
700 |
1000 |
1100 |
1400 |
|
- |
z |
60 |
70 |
70 |
70 |
80 |
100 |
110 |
120 |
140 |
180 |
200 |
250 |
300 |
350 |
500 |
600 |
800 |
1000 |
1100 |
1400 |
1800 |
|
- |
y |
80 |
80 |
100 |
100 |
110 |
120 |
140 |
180 |
200 |
250 |
280 |
350 |
400 |
500 |
600 |
800 |
1000 |
1100 |
1400 |
1800 |
2500 |
|
- |
x |
100 |
110 |
110 |
120 |
140 |
140 |
180 |
200 |
250 |
280 |
350 |
400 |
500 |
600 |
800 |
1000 |
1200 |
1400 |
1800 |
2000 |
2800 |
* Вид допуска на боковой зазор используется при изменении соответствия между видом сопряжения и видом допуска (см. пп. 1.6 и 1.9).
Примечание. Величина Fr устанавливается в соответствии с нормой кинематической точности по табл. 6.
Таблица 20
Нормы
бокового зазора
(показатель - Ecs)
|
Степень точности по нормам плавности |
Делительный диаметр d, мм |
||||||||||||||||||
|
До 80 |
Св. 80 до 125 |
Св. 125 до 180 |
Св. 180 до 250 |
Св. 250 до 315 |
Св. 315 до 400 |
Св. 400 до 500 |
Св. 500 до 630 |
Св. 630 до 800 |
Св. 800 до 1000 |
Св. 1000 до 1250 |
Св. 1250 до 1600 |
Св. 1600 до 2000 |
Св. 2000 до 2500 |
Св. 2500 до 3150 |
Св. 3150 до 4000 |
Св. 4000 до 5000 |
Св. 5000 до 6300 |
||
|
мкм |
|||||||||||||||||||
|
Н |
3 - 6 |
9 |
10 |
12 |
14 |
16 |
16 |
18 |
20 |
22 |
30 |
35 |
35 |
45 |
50 |
60 |
70 |
90 |
120 |
|
7 |
10 |
12 |
14 |
14 |
16 |
18 |
20 |
22 |
25 |
35 |
35 |
40 |
50 |
60 |
70 |
80 |
100 |
140 |
|
|
Е |
3 - 6 |
22 |
25 |
30 |
35 |
40 |
40 |
45 |
50 |
60 |
70 |
80 |
90 |
110 |
120 |
160 |
180 |
240 |
300 |
|
7 |
25 |
30 |
35 |
35 |
40 |
45 |
50 |
60 |
70 |
70 |
90 |
100 |
120 |
140 |
180 |
200 |
250 |
350 |
|
|
D |
3 - 6 |
35 |
40 |
45 |
55 |
60 |
60 |
70 |
80 |
90 |
100 |
120 |
140 |
180 |
200 |
240 |
300 |
350 |
450 |
|
7 |
35 |
45 |
50 |
60 |
70 |
70 |
80 |
90 |
100 |
120 |
140 |
160 |
180 |
220 |
250 |
350 |
400 |
500 |
|
|
8 |
40 |
50 |
60 |
70 |
70 |
80 |
90 |
100 |
120 |
140 |
140 |
180 |
200 |
250 |
300 |
350 |
450 |
550 |
|
|
С |
3 - 6 |
55 |
60 |
70 |
80 |
90 |
100 |
110 |
120 |
140 |
160 |
180 |
220 |
250 |
300 |
400 |
500 |
600 |
700 |
|
7 |
60 |
70 |
80 |
90 |
100 |
120 |
140 |
140 |
160 |
180 |
200 |
250 |
300 |
350 |
450 |
500 |
700 |
800 |
|
|
8 |
70 |
80 |
90 |
100 |
120 |
140 |
140 |
160 |
180 |
200 |
220 |
300 |
350 |
400 |
500 |
600 |
700 |
900 |
|
|
9 |
70 |
90 |
100 |
120 |
140 |
140 |
140 |
180 |
200 |
220 |
250 |
350 |
350 |
450 |
500 |
600 |
700 |
900 |
|
|
В |
3 - 6 |
90 |
100 |
120 |
140 |
160 |
160 |
180 |
200 |
220 |
250 |
300 |
350 |
400 |
500 |
600 |
800 |
900 |
1100 |
|
7 |
100 |
120 |
140 |
140 |
180 |
180 |
200 |
220 |
250 |
300 |
350 |
400 |
500 |
600 |
700 |
800 |
1000 |
1400 |
|
|
8 |
100 |
120 |
140 |
160 |
180 |
200 |
220 |
250 |
300 |
350 |
350 |
450 |
500 |
600 |
700 |
900 |
1200 |
1400 |
|
|
9 |
120 |
140 |
160 |
180 |
200 |
220 |
250 |
300 |
300 |
350 |
400 |
500 |
600 |
700 |
800 |
1000 |
1400 |
1400 |
|
|
10 |
120 |
110 |
180 |
180 |
220 |
250 |
250 |
300 |
350 |
400 |
450 |
500 |
600 |
700 |
900 |
1000 |
1400 |
1600 |
|
|
11 |
140 |
160 |
180 |
200 |
220 |
250 |
300 |
300 |
350 |
400 |
450 |
600 |
800 |
900 |
900 |
1200 |
1400 |
1800 |
|
|
А |
3 - 6 |
140 |
160 |
180 |
200 |
250 |
250 |
300 |
300 |
350 |
400 |
500 |
600 |
700 |
800 |
1000 |
1200 |
1400 |
1800 |
|
7 |
150 |
180 |
200 |
220 |
250 |
300 |
350 |
350 |
400 |
450 |
500 |
700 |
700 |
900 |
1000 |
1400 |
1600 |
2000 |
|
|
8 |
160 |
200 |
220 |
250 |
300 |
350 |
350 |
400 |
450 |
500 |
600 |
700 |
800 |
1000 |
1200 |
1400 |
1800 |
2200 |
|
|
9 |
180 |
200 |
250 |
300 |
300 |
350 |
350 |
450 |
500 |
600 |
700 |
700 |
900 |
1000 |
1400 |
1600 |
1800 |
2500 |
|
|
10 |
200 |
220 |
250 |
300 |
350 |
350 |
450 |
450 |
500 |
600 |
700 |
800 |
1000 |
1200 |
1400 |
1600 |
2000 |
2500 |
|
|
11 |
200 |
240 |
300 |
350 |
350 |
400 |
450 |
500 |
600 |
700 |
700 |
900 |
1000 |
1200 |
1400 |
1800 |
2200 |
3000 |
|
|
12 |
220 |
250 |
350 |
350 |
350 |
450 |
500 |
500 |
600 |
700 |
800 |
900 |
1200 |
1400 |
1600 |
2000 |
2500 |
3000 |
|
Примечание. Есs - наименьшее отклонение толщины зуба для зубчатых колес с внешними и внутренними зубьями.
Таблица 21
Нормы
бокового зазора
(Тс - допуск на толщину зуба)
мкм
|
Вид допуска* |
Допуск на радиальное биение зубчатого венца Fr |
|||||||||||||||||||||
|
До 8 |
Св. 8 до 10 |
Св. 10 до 12 |
Св. 12 до 16 |
Св. 16 до 20 |
Св. 20 до 25 |
Св. 25 до 32 |
Св. 32 до 40 |
Св. 40 до 50 |
Св. 50 до 60 |
Св. 60 до 80 |
Св. 80 до 100 |
Св. 100 до 125 |
Св. 125 до 160 |
Св. 160 до 200 |
Св. 200 до 250 |
Св. 250 до 320 |
Св. 320 до 400 |
Св. 400 до 600 |
Св. 500 до 630 |
Св. 630 до 800 |
||
|
Н, Е |
h |
20 |
22 |
25 |
30 |
30 |
35 |
40 |
45 |
50 |
70 |
70 |
90 |
120 |
140 |
180 |
220 |
250 |
350 |
400 |
500 |
700 |
|
D |
d |
25 |
30 |
30 |
35 |
40 |
45 |
50 |
60 |
70 |
70 |
100 |
120 |
140 |
180 |
220 |
250 |
350 |
450 |
500 |
700 |
700 |
|
C |
с |
35 |
35 |
35 |
45 |
50 |
60 |
70 |
70 |
90 |
100 |
140 |
160 |
180 |
220 |
300 |
350 |
450 |
500 |
700 |
900 |
1000 |
|
В |
b |
40 |
45 |
50 |
50 |
60 |
70 |
70 |
90 |
100 |
140 |
140 |
180 |
220 |
300 |
350 |
450 |
500 |
700 |
800 |
1000 |
1400 |
|
А |
а |
50 |
60 |
60 |
70 |
70 |
80 |
100 |
120 |
140 |
140 |
180 |
220 |
250 |
350 |
400 |
500 |
700 |
800 |
1000 |
1200 |
1400 |
|
- |
z |
70 |
70 |
70 |
80 |
90 |
100 |
140 |
140 |
160 |
180 |
220 |
250 |
350 |
400 |
500 |
700 |
800 |
1000 |
1200 |
1400 |
1800 |
|
- |
у |
80 |
90 |
100 |
100 |
120 |
140 |
140 |
180 |
200 |
250 |
300 |
350 |
450 |
500 |
700 |
800 |
1000 |
1200 |
1400 |
1800 |
2500 |
|
- |
x |
100 |
120 |
120 |
140 |
140 |
160 |
180 |
220 |
250 |
300 |
350 |
450 |
500 |
700 |
800 |
1000 |
1400 |
1400 |
1800 |
2200 |
3000 |
* Вид допуска на боковой зазор используется при изменении соответствия между видом сопряжения и видом допуска (см. пп. 1.6 и 1.9).
Примечание. Величина Fr устанавливается в соответствии с нормой кинематической точности по табл. 6.
3.5. Предельные отклонения межосевого расстояния fa устанавливаются по табл. 13 в соответствии с видом сопряжения или, если это указано в условном обозначении точности передачи (см. п. 1.10), с классом отклонений межосевого расстояния.
3.6. При контроле предельных отклонений измерительного межосевого расстояния верхнее Ea¢¢s и нижнее Ea¢¢i отклонения определяются по табл. 22.
Таблица 22
Нормы
бокового зазора
(показатели Ea¢¢s и Ea¢¢i)
|
Ea¢¢s |
Для зубчатых колес с внешними зубьями равно +f²i по табл. 8 |
|
Для зубчатых колес с внутренними зубьями равно +Тн по табл. 15 |
|
|
Ea¢¢i |
Для зубчатых колес с внешними зубьями равно -Тн по табл. 15 |
|
Для зубчатых колес с внутренними зубьями равно -f²i пo табл. 8. |
3.7. При контроле размера по роликам наименьшее отклонение ЕМs и допуск ТM определяют пересчетом величин ЕWms и TWm пo формулам:
Наименьшее отклонение размера по роликам
![]()
и допуск на размер по роликам
![]()
где aD - угол профиля в точке на концентрической окружности зубчатого колеса, проходящей через центр ролика, определяется при геометрическом расчете размера по роликам;
bD - угол наклона зуба на основном цилиндре.
Примеры использования таблиц настоящего стандарта для назначения норм точности приведены в справочном приложении 5.
ПРИЛОЖЕНИЕ 1
Справочное
ТЕРМИНЫ, ОБОЗНАЧЕНИЯ И ОПРЕДЕЛЕНИЯ
1. Кинематическая погрешность передачи
Разность между действительным и номинальным (расчетным) углами поворота ведомого зубчатого колеса передачи. Выражается в линейных величинах длиной дуги его делительной окружности (черт. 1).

![]()
z1 - число зубьев ведущего зубчатого колеса; z2 - число зубьев ведомого зубчатого колеса; j1 - действительный угол поворота ведущего зубчатого колеса; j2 - действительный угол поворота ведомого зубчатого колеса; j3 - номинальный угол поворота ведомого зубчатого колеса.
1.1. Наибольшая кинематическая погрешность передачи F¢i0r
Наибольшая алгебраическая разность значений кинематической погрешности передачи за полный цикл изменения относительного положения зубчатых колес (т.е. в пределах числа оборотов большего зубчатого колеса, равного частному от деления числа зубьев меньшего зубчатого колеса на общий наибольший делитель чисел зубьев обоих зубчатых колес передачи) (черт. 2).
1.2. Допуск на кинематическую погрешность передачи F¢i0
2. Кинематическая погрешность зубчатого колеса
Разность между действительным и номинальным (расчетным) углами поворота зубчатого колеса на его рабочей оси, ведомого измерительным зубчатым колесом при номинальном взаимном положении осей вращения этих колес.
Выражается в линейных величинах длиной дуги делительной окружности.
Примечания:
1. Под рабочей осью зубчатого колеса понимается ось, вокруг которой оно вращается в передаче.
2. Под измерительным зубчатым колесом понимается зубчатое колесо повышенной точности, применяемое в качестве измерительного элемента для однопрофильного и двухпрофильного методов контроля зубчатых колес.
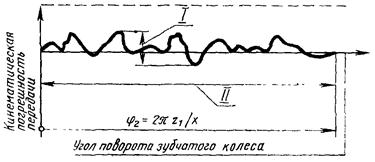
j2 - угол поворота большего колеса; х - общий наибольший делитель чисел зубьев z1 и z2, соответственно шестерни и колеса; I - наибольшая кинематическая погрешность передачи F¢i0r; II - полный цикл изменения относительного положения зубчатых колес.
2.1. Наибольшая кинематическая погрешность зубчатого колеса F¢ir
Наибольшая алгебраическая разность значений кинематической погрешности зубчатого колеса, в пределах его полного оборота (черт. 3.).

I - кривая кинематической погрешности зубчатого колеса; II - один оборот зубчатого колеса.
2.2. Допуск на кинематическую погрешность зубчатого колеса F¢i
3. Кинематическая погрешность зубчатого колеса на k шагах F¢ikr
Разность между действительным и номинальным (расчетным) углами поворота зубчатого колеса (на рассматриваемом числе зубьев k) на его рабочей оси, ведомого измерительным зубчатым колесом, при номинальном взаимном положении осей вращения обоих колес.
Выражается в линейных величинах длиной дуги делительной окружности (чертеж, см. п. 2.1).
3.1. Допуск на кинематическую погрешность зубчатого колеса на k шагах F¢ik
4. Накопленная погрешность k шагов FPkr
Наибольшая разность дискретных значений кинематической погрешности зубчатого колеса при номинальном его повороте на k целых угловых шагов (черт. 4).
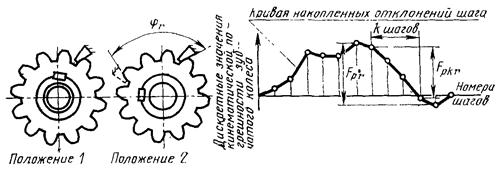
![]()
jr - действительный угол поворота зубчатого колеса; z - число зубьев зубчатого колеса; k - число целых угловых шагов от k ³ 2; r - радиус делительной окружности зубчатого колеса.
4.1. Допуск на накопленную погрешность k шагов FPk
5. Накопленная погрешность шага зубчатого колеса FPr
Наибольшая алгебраическая разность значений накопленных погрешностей в пределах зубчатого колеса (чертеж, см. п. 4).
5.1. Допуск на накопленную погрешность шага зубчатого колеса FP
6. Радиальное биение зубчатого венца Frr
Разность действительных предельных положений исходного контура в пределах зубчатого колеса (от его рабочей оси).
6.1. Допуск на радиальное биение зубчатого венца Fr
7. Погрешность обката Fcr
Составляющая кинематической погрешности зубчатого колеса, определяемая при вращении его на технологической оси и при исключении циклических погрешностей зубцовой частоты и кратных ей более высоких частот.
Примечания:
1. Под технологической осью зубчатого колеса понимается ось, вокруг которой оно вращается в процессе окончательной обработки зубьев по обеим их сторонам.
2. Погрешность обката может определяться как погрешность кинематической цепи деления зубообрабатывающего станка.
7.1. Допуск на погрешность обката Fc
8. Колебание длины общей нормали FvWr
Разность между наибольшей и наименьшей действительными длинами общей нормали в одном и том же зубчатом колесе.
Примечание. Под действительной длиной общей нормали понимается расстояние между двумя параллельными плоскостями, касательными к двум разноименным активным боковым поверхностям зубьев зубчатого колеса.
8.1. Допуск на колебание длины общей нормали FvW
9. Колебание измерительного межосевого расстояния:
за оборот зубчатого колеса F²ir;
на одном зубе f²ir.
Разность между наибольшим и наименьшим действительными межосевыми расстояниями при двухпрофильном зацеплении измерительного зубчатого колеса с контролируемым зубчатым колесом при повороте последнего на полный оборот или соответственно на один угловой шаг (черт. 5).

I - один угловой шаг; II - кривая изменения измерительного межосевого расстояния; III - один оборот зубчатого колеса.
9.1. Допуск на колебание измерительного межосевого расстояния:
за оборот зубчатого колеса F²i;
на одном зубе f²i.
10. Циклическая погрешность передачи fzk0r.
Удвоенная амплитуда гармонической составляющей кинематической погрешности передачи (черт. 6).

I - кривая кинематической погрешности передачи; II - гармонические составляющие кинематической погрешности передачи при разных значениях частоты k.
10.1. Допуск на циклическую погрешность передачи fzk0.
11. Циклическая погрешность зубцовой частоты в передаче fzz0r.
Циклическая погрешность передачи с частотой повторений, равной частоте входа зубьев в зацепление.
11.1. Допуск на циклическую погрешность зубцовой частоты в передаче fzz0.
12. Циклическая погрешность зубчатого колеса fzkr
Удвоенная амплитуда гармонической составляющей кинематической погрешности зубчатого колеса (черт. 7).

I - кривая кинематической погрешности зубчатого колеса; II - гармонические составляющие кинематической погрешности зубчатого колеса при разных значениях частоты k; III - амплитуда.
12.1 Допуск на циклическую погрешность зубчатого колеса fzk
13. Циклическая погрешность зубцовой частоты зубчатого колеса fzzr
Циклическая погрешность зубчатого колеса при зацеплении с измерительным зубчатым колесом с частотой повторений, равной частоте входа зубьев в зацепление.
13.1. Допуск на циклическую погрешность зубцовой частоты зубчатого колеса fzz.
14. Местная кинематическая погрешность передачи f¢i0r
Наибольшая разность между местными соседними экстремальными (минимальными и максимальными) значениями кинематической погрешности передачи за полный цикл изменения относительного положения зубчатых колес передачи.
14.1 Допуск на местную кинематическую погрешность зубчатой передачи f¢i0r
15. Местная кинематическая погрешность зубчатого колеса f¢ir.
Наибольшая разность между местными соседними экстремальными (минимальными и максимальными) значениями кинематической погрешности зубчатого колеса в пределах его оборота (черт. 8).
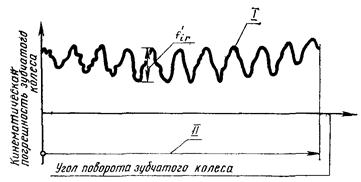
I - кривая кинематической погрешности зубчатого колеса; II - один оборот зубчатого колеса.
15.1. Допуск на местную кинематическую погрешность зубчатого колеса f¢i
16. Отклонение шага fPtr
Дискретное значение кинематической погрешности зубчатого колеса при его повороте на один номинальный угловой шаг (чертеж, см. п. 4 при k = 1).
16.1. Предельные отклонения шага:
верхнее +fPt
нижнее -fPt
17. Разность шагов fvPtr
Разность между двумя отклонениями шагов в любых участках зубчатого колеса.
17.1. Допуск на разность шагов fvPt
18. Отклонение шага зацепления fPbr
Разность между действительным и номинальным шагами зацепления (черт. 9).
Примечание. Под действительным шагом зацепления понимается кратчайшее расстояние между двумя параллельными плоскостями, касательными к двум одноименным активным боковым поверхностям соседних зубьев зубчатого колеса.

I - номинальный шаг зацепления; II - действительный профиль зуба; III - номинальный профиль зуба; IV - действительный шаг зацепления.
18.1. Предельные отклонения шага зацепления;
верхнее +fPb
нижнее -fPb
19. Погрешность профиля зуба ffr.
Расстояние по нормали между двумя ближайшими друг к другу номинальными торцовыми профилями зуба, между которыми размещается действительный торцовый активный профиль зуба зубчатого колеса (черт. 10).
Примечание. Под действительным торцовым профилем зуба понимается линия пересечения действительной боковой поверхности зуба зубчатого колеса в плоскости, перпендикулярной его рабочей оси.
I - действительный торцовый активный профиль зуба; II - номинальные торцовые профили зуба; III - основная окружность; IV - границы активного профиля зуба.
19.1. Допуск на погрешность профиля зуба ff.
20. Мгновенное пятно контакта
Часть активной боковой поверхности зуба колеса передачи, на которой располагаются следы его прилегания к зубьям шестерни, покрытым красителем, после поворота колеса собранной передачи на полный оборот при легком торможении, обеспечивающем непрерывное контактирование зубьев обоих зубчатых колес.
20.1. Суммарное пятно контакта
Часть активной боковой поверхности зуба зубчатого колеса, на которой располагаются следы прилегания зубьев парного зубчатого колеса в собранной передаче после вращения под нагрузкой, устанавливаемой конструктором (черт. 11).
Примечание. Определяются относительные размеры пятна контакта в процентах: по длине зуба - отношение расстояния а между крайними точками следов прилегания за вычетом разрывов с, превосходящих величину модуля в мм, к длине зуба b,
![]()
по высоте зуба - отношение средней (по всей длине зуба) высоты следов прилегания hm к высоте зуба соответствующей активной боковой поверхности hP
![]()
21. Отклонение осевых шагов по нормали FРхпr
Разность между действительным осевым расстоянием зубьев и суммой соответствующего числа номинальных осевых шагов, умноженная на синус угла наклона делительной линии зуба (черт. 12).
Примечание. Под действительным осевым расстоянием зубьев понимается расстояние между одноименными линиями зубьев косозубого зубчатого колеса по прямой, параллельной рабочей оси.
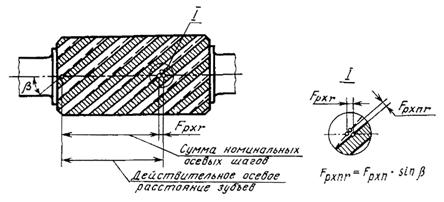
21.1. Предельные отклонения осевых шагов по нормали:
верхнее +FРхп
нижнее -FРхп
22. Суммарная погрешность контактной линии Fkr
Расстояние по нормали между двумя ближайшими друг к другу номинальными контактными линиями, условно наложенными на плоскость (поверхность) зацепления, между которыми размещается действительная контактная линия на активной боковой поверхности (черт. 13).
I - направление рабочей оси вращения колеса; II - номинальные контактные линии; III - действительная контактная линия; IV - границы активной поверхности зуба.
22.1. Допуск на суммарную погрешность контактной линии Fk.
23. Погрешность направления зуба Fbr
Расстояние между двумя ближайшими друг к другу номинальными делительными линиями зуба в торцовом сечении, между которыми размещается действительная делительная линия зуба, соответствующая рабочей ширине зубчатого венца или полушеврона (черт. 14).
Примечание. Под действительной делительной линией зуба понимается линия пересечения действительной боковой поверхности зуба зубчатого колеса делительным цилиндром, ось которого совпадает с рабочей осью.

I - действительная делительная линия зуба; II - номинальные делительные линии зуба; III - ширина зубчатого венца; IV - рабочая ось зубчатого колеса.
23.1. Допуск на направление зуба Fb
24. Отклонение от параллельности осей fxr
Отклонение от параллельности проекций рабочих осей зубчатых колес в передаче на плоскость, в которой лежит одна из осей и точка второй оси в средней плоскости передачи. Определяется в торцовой плоскости в линейных единицах на длине, равной рабочей ширине зубчатого венца или ширине полушеврона (черт. 15).
Примечание. Под средней плоскостью передачи понимается плоскость, проходящая через середину рабочей ширины зубчатого венца или для шевронной передачи через середину расстояния между внешними торцами, ограничивающими рабочую ширину полушеврона.
24.1. Допуск параллельности осей fх
25. Перекос осей fуr
Отклонение от параллельности проекции рабочих осей зубчатых колес в передаче на плоскость, параллельную одной из осей и перпендикулярную плоскости, в которой лежит эта ось, и точка пересечения второй оси со средней плоскостью передачи. Определяется в торцовой плоскости в линейных единицах на длине, равной рабочей ширине зубчатого венца или ширине полушеврона (чертеж, см. п. 24).
25.1. Допуск на перекос осей fу
26. Отклонение межосевого расстояния fаr
Разность между действительным и номинальным межосевыми расстояниями в средней торцовой плоскости передачи.
26.1. Предельные отклонения межосевого расстояния:
верхнее +fa
нижнее -fa
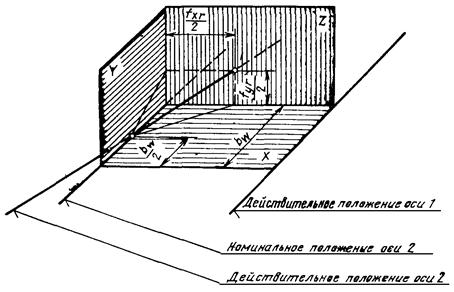
27. Гарантированный боковой зазор jnmin
Наименьший предписанный боковой зазор.
27.1. Допуск на боковой зазор Тjn
28. Дополнительное смещение исходного контура ЕHr
Дополнительное смещение исходного контура от его номинального положения в тело зубчатого колеса, осуществляемое с целью обеспечения в передаче гарантированного бокового зазора (черт. 16).
Примечание. Под номинальным положением исходного контура понимается положение исходного контура на зубчатом колесе, лишенном погрешностей, при котором расстояние от рабочей оси вращения до делительной прямой равно:
![]()
где xmn - номинальное смещение исходного контура, не предусматривающее бокового зазора.
28.1. Наименьшее дополнительное смещение исходного контура:
для зубчатого колеса с внешними зубьями -EHs;
для зубчатого колеса с внутренними зубьями +EHi.
28.2. Допуск на дополнительное смещение исходного контура ТH.
29. Предельные отклонения измерительного межосевого расстояния:
- для зубчатых колес с внешними зубьями:
верхнее +Еа¢¢s
нижнее -Еа¢¢i
- для зубчатых колес с внутренними зубьями:
верхнее -Еа¢¢s
нижнее +Еа¢¢i
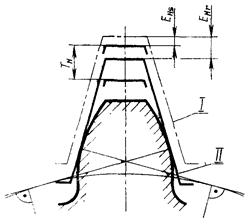
I - номинальное положение исходного контура; II - действительное положение исходного контура.
Разность между допускаемым наибольшим или соответственно наименьшим измерительным и номинальным межосевыми расстояниями.
Примечание. Под номинальным измерительным межосевым расстоянием понимается расчетное межосевое расстояние при двухпрофильном зацеплении измерительного зубчатого колеса с контролируемым зубчатым колесом, имеющим наименьшее дополнительное смещение исходного контура.
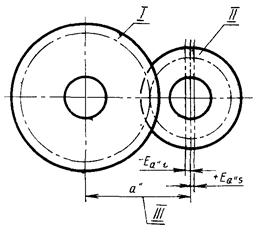
I - контролируемое зубчатое колесо; II - измерительное зубчатое колесо; III - номинальное измерительное межосевое расстояние.
30. Номинальная длина общей нормали W
Расчетная длина общей нормали, соответствующая номинальному положению исходного контура.
30.1. Отклонение длины общей нормали EWr
Разность значений действительной и номинальной длины общей нормали.
30.2. Наименьшее отклонение длины общей нормали:
для зубчатого колеса с внешними зубьями -ЕWs;
для зубчатого колеса с внутренними зубьями +ЕWi.
Наименьшее предписанное отклонение длины общей нормали, осуществляемое с целью обеспечения в передаче гарантированного бокового зазора.
30.3. Допуск на длину общей нормали TW
31. Средняя длина общей нормали Wmr
Средняя арифметическая из всех действительных длин общей нормали по зубчатому колесу (черт. 18).

![]()
31.1. Отклонение средней длины общей нормали EWmr
Разность значений средней длины общей нормали по зубчатому колесу и номинальной длины общей нормали.
31.2. Наименьшее отклонение средней длины общей нормали:
- для зубчатого колеса с внешними зубьями <- -ЕWms,
- для зубчатого колеса с внутренними зубьями <- +ЕWmi.
Наименьшее предписанное отклонение средней длины общей нормали, осуществляемое с целью обеспечения в передаче гарантированного бокового зазора.
31.3. Допуск на среднюю длину общей нормали ТWm.
32. Номинальная
толщина зуба (по постоянной хорде) ![]() .
.
Толщина зуба по постоянной хорде, отнесенная к нормальному сечению, соответствующая номинальному положению исходного контура.
32.1. Отклонение толщины зуба Есr
Разность между действительной и номинальной толщинами зуба по постоянной хорде.
32.2. Наименьшее отклонение толщины зуба - Ecs
Наименьшее предписанное уменьшение постоянной хорды, осуществляемое с целью обеспечения в передаче гарантированного бокового зазора.
32.3. Допуск на толщину зуба Тс
33. Отклонение размера по роликам ЕMr
Разность действительной и номинальной величин размера М по роликам.
Примечание. Под номинальным размером по роликам М понимается расчетный размер по верху роликов (или между роликами при контроле зубчатых колес с внутренними зубьями), соответствующий номинальному положению исходного контура.
33.1. Наименьшее отклонение размера по роликам:
для зубчатого колеса с внешними зубьями -ЕMs
для зубчатого колеса с внутренними зубьями +EMi
33.2. Допуск на размер по роликам ТM
34. Эффективный коэффициент осевого перекрытия передачи ebe
Часть коэффициента осевого перекрытия передачи, определяемая с учетом действительного суммарного пятна контакта в передаче.
ПРИЛОЖЕНИЕ 2
Справочное
Таблица 1
Зависимости предельных отклонений и допусков по нормам кинематической точности, плавности работы и контакта зубьев от геометрических параметров зубчатых колес
|
FP |
Fr |
FvW = Fc |
±fpt |
ff |
f²i |
fzzo |
Fpxn |
Fk |
Fb |
||||||||||||||
|
1 |
2 |
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
Abw + B |
Alb + Bm + C |
|
|||||||||||||
|
|
B = 0,25A |
B = 1,4A |
B = 0,25A |
B = 0,0125A |
B = 0,25A |
B = 40A |
|||||||||||||||||
|
В |
С |
А |
С |
А |
C |
A |
B |
A |
C |
А |
B |
А |
C |
A |
B |
C |
А |
В |
А |
С |
А |
С |
|
|
3 |
0,8 |
1,6 |
0,56 |
7,1 |
0,25 |
3 |
0,84 |
0,008 |
0,16 |
2 |
0,16 |
3,15 |
- |
- |
1,56 |
0,324 |
0,121 |
0,018 |
6 |
0,014 |
7 |
0,50 |
2,5 |
|
4 |
1,25 |
2,5 |
0,90 |
11,2 |
0,4 |
4,8 |
1,30 |
0,012 |
0,25 |
3,15 |
0,25 |
4 |
0,45 |
5,6 |
2,5 |
0,315 |
0,115 |
0,023 |
8 |
0,017 |
9 |
0,63 |
3,15 |
|
5 |
2 |
4 |
1,40 |
18 |
0,63 |
7,5 |
2,05 |
0,020 |
0,40 |
5 |
0,40 |
5 |
0,63 |
8 |
3,46 |
0,349 |
0,123 |
0,029 |
10 |
0,022 |
12 |
0,80 |
4 |
|
6 |
3,15 |
6 |
2,24 |
28 |
1 |
12 |
3,25 |
0,031 |
0,63 |
8 |
0,63 |
6,3 |
0,90 |
11,2 |
5,135 |
0,344 |
0,126 |
0,036 |
12 |
0,028 |
15 |
1 |
5 |
|
7 |
4,45 |
9 |
3,15 |
40 |
1,4 |
17 |
4,55 |
0,044 |
0,90 |
11,2 |
1 |
8 |
1,25 |
16 |
7,69 |
0,348 |
0,125 |
0,045 |
15 |
0,035 |
19 |
1,25 |
6,3 |
|
8 |
6,3 |
12,5 |
4 |
50 |
1,75 |
21 |
5,68 |
0,055 |
1,25 |
16 |
1,6 |
10 |
1,8 |
22,4 |
9,27 |
0,185 |
0,072 |
0,071 |
23,70 |
0,055 |
29,6 |
2 |
10 |
|
9 |
9 |
18 |
5 |
63 |
- |
- |
7,10 |
0,068 |
1,8 |
22,4 |
2,5 |
16 |
2,24 |
28 |
- |
- |
- |
0,110 |
37,44 |
0,087 |
46,8 |
3,15 |
16 |
|
10 |
12,5 |
25 |
6,3 |
80 |
- |
- |
8,88 |
0,086 |
2,5 |
31,5 |
4 |
25 |
2,8 |
35,5 |
- |
- |
- |
0,176 |
59,16 |
0,138 |
73,9 |
5 |
25 |
|
11 |
17,5 |
35,5 |
8 |
100 |
- |
- |
11,10 |
0,107 |
3,55 |
45 |
6,3 |
40 |
3,55 |
45 |
- |
- |
- |
0,280 |
93,48 |
0,218 |
116,8 |
8 |
40 |
|
12 |
25 |
50 |
10 |
125 |
- |
- |
13,90 |
0,134 |
5 |
63 |
10 |
63 |
4,5 |
56 |
- |
- |
- |
0,443 |
147,72 |
0,344 |
184,0 |
12,5 |
63 |
Примечания:
1. Принятые обозначения:
d - делительный диаметр зубчатого колеса;
т - модуль; lb - наибольшая длина контактной линии на одном зубе;
bw - ширина зубчатого венца;
L - длина дуги делительной окружности;
z - число зубьев колеса передачи.
2. При расчете допусков значения d, m, bw, lb, L принимаются среднеарифметическими в интервале, а значения z - среднегеометрическими (параметры в миллиметрах, допуски - в микрометрах).
3. В табл. 6 внесены меньшие из величин Fr, подсчитанных по зависимостям 1 и 2. В степени точности 9 для диаметров до 400 мм допуски Fr рассчитаны как среднегеометрические значения величин (табл. 6) для 8 и 10 степеней точности
4. Числовые значения допусков в таблицах настоящего стандарта округлены по рядам R20 и R40.
Таблица 2
Зависимости для гарантированных боковых зазоров, отклонений и допусков по нормам бокового зазора
|
Степень точности |
Вид сопряжения |
|||||||
|
- |
Н |
Е |
D |
С |
В |
А |
||
|
Гарантированный боковой зазор jnmin |
- |
- |
0 |
IT7 |
IT8 |
IT9 |
IT10 |
IT11 |
|
Предельные отклонения межосевого расстояния ±fа |
- |
0,5IT6 (I класс) |
0,5IT7 (II класс) |
0,5IT8 (III класс) |
0,5IT9 (IV класс) |
0,5IT10 (V класс) |
0,5IT11 (VI класс) |
|
|
Наименьшее дополнительное смещение исходного контура EHs |
3 - 6 |
- |
0,4IT7 |
IT7 |
IT8 |
IT9 |
IT10 |
IT11 |
|
Увеличение EHs в % |
7 |
- |
10 |
10 |
10 |
10 |
10 |
10 |
|
8 |
- |
- |
20 |
20 |
20 |
20 |
||
|
9 |
- |
- |
- |
30 |
30 |
30 |
||
|
10 |
- |
- |
- |
- |
40 |
40 |
||
|
11 |
- |
- |
- |
- |
- |
50 |
||
|
12 |
- |
- |
- |
- |
- |
60 |
||
|
Допуск на смещение исходного контура ТH (вид допуска и допуск на боковой зазор) |
- |
- |
1,1Fr + 20 (h) |
1,4Fr + 25 (d) |
1,8Fr + 32 (с) |
2,2Fr + 40 (b) |
2,5Fr + 50 (a) |
|
|
для z - 3,15 Fr + 63; для у - 4 Fr + 80; для х - 5 Fr + 100 |
||||||||
Примечания:
1. Величины jnmin и ±fa выбираются в зависимости от межосевого расстояния передачи, а величины EHs - от диаметра делительной окружности колеса.
2. При комбинировании норм из разных степеней точности для ЕНs принимается во внимание степень по нормам плавности.
ПРИЛОЖЕНИЕ 3
Справочное
Взаимосвязь допусков и предельных отклонений, установленных в настоящем стандарте
|
Показатель точности |
Формула или обозначения |
|
|
кинематической точности |
Допуск на кинематическую погрешность передачи |
F¢i0 = F¢i1 + F¢i2 |
|
Допуск на кинематическую погрешность зубчатого колеса |
F¢i = FP + ff |
|
|
Допуск на кинематическую погрешность зубчатого колеса на k шагах |
F¢ik = FPk + ff |
|
|
Допуск на накопленную погрешность шага зубчатого колеса |
FP |
|
|
Допуск на накопленную погрешность k шагов |
FPk |
|
|
Допуск на радиальное биение зубчатого венца |
Fr |
|
|
Допуск на погрешность обката |
Fc = FvW |
|
|
Допуск на колебание длины общей нормали |
FvW = Fc |
|
|
Допуск на колебание измерительного межосевого расстояния за оборот зубчатого колеса |
F²i = 1,4Fr |
|
|
плавности работы |
Допуск на местную кинематическую погрешность передачи |
f¢i0 = 1,25f¢i2 |
|
Допуск на местную кинематическую погрешность зубчатого колеса |
f¢i = |fPt| + ff |
|
|
Допуск на циклическую погрешность зубцовой частоты в передаче |
fzz0 |
|
|
Допуск на циклическую погрешность зубцовой частоты зубчатого колеса |
fzz = 0,6fzz0 |
|
|
Допуск на циклическую погрешность передачи |
fzk0 = fzk |
|
|
Допуск на циклическую погрешность зубчатого колеса |
fzk = (k-0,6 + 0,13)Fr |
|
|
Предельные отклонения шага |
fPt |
|
|
Допуск на разность любых шагов |
fvPt = 1,6|fPt| |
|
|
плавности работы |
Предельные отклонения шага зацепления |
|fPb| = |fPt|cosa |
|
Допуск на погрешность профиля зуба |
ff |
|
|
Допуск на колебание измерительного межосевого расстояния на одном зубе |
f²i |
|
|
контакта зубьев |
Предельные отклонения осевых шагов по нормали |
FPxn |
|
Допуск на суммарную погрешность контактной линии |
Fk |
|
|
Допуск на погрешность направления зуба |
Fb |
|
|
Допуск на параллельность осей |
fx = Fb |
|
|
Допуск на перекос осей |
fy = 0,5Fb |
|
|
бокового зазора |
Гарантированный боковой зазор |
jnmin |
|
Предельное отклонение межосевого расстояния |
fa = ±0,5jnmin |
|
|
Наименьшее дополнительное смещение исходного контура |
|
|
|
Допуск на смещение исходного контура |
TH > Fr |
|
|
Наименьшее отклонение средней длины общей нормали |
EWms = -(|EHs| + 0,35Fr)2sina |
|
|
Допуск на среднюю длину общей нормали |
TWm = -(TH + 0,7Fr)2sina |
|
|
Наименьшее отклонение длины общей нормали |
EWs = EHs2sina |
|
|
Допуск на длину общей нормали |
TW = TH × 2sina |
|
|
Наименьшее отклонение толщины зуба |
Ecs = EHs × 2tga |
|
|
Допуск на толщину зуба |
Tc = TH2tga |
|
|
Предельные отклонения измерительного межосевого расстояния |
Ea²s = +f²i; Ea²i = -TH |
|
|
Наименьшее отклонение размера по роликам |
|
|
|
Допуск на размер по роликам |
|
Примечания:
1. Подстрочные индексы 1, 2 и 0 относятся к шестерне, колесу и передаче соответственно.
2. При подсчете величин fzk (табл. 10) значение k (частота за оборот зубчатого колеса) принято как среднегеометрическая величина в интервале; значение Fr принято на степень точнее норм плавности.
3. kj - компенсация уменьшения бокового зазора, возникающего из-за погрешности изготовления зубчатых колес и монтажа передачи. Величина компенсации определяется по формуле
![]()
4. Отклонения по нормам бокового зазора даны для зубчатых колес внешнего зацепления.
Для зубчатых колес с внутренними зубьями меняется подстрочный индекс s на i для ЕHs, ЕWms, EWs и для ЕHs и ЕWms - меняется знак отклонения.
ПРИЛОЖЕНИЕ 4
Справочное
ОБ ИЗМЕНЕНИИ ДОПУСКА НА КОЛЕБАНИЕ ИЗМЕРИТЕЛЬНОГО МЕЖОСЕВОГО РАССТОЯНИЯ НА ОДНОМ ЗУБЕ
Если при измерении в плотном зацеплении реализуется угол зацепления atWm, не равный углу зацепления в обработке atW0 зубчатого колеса, то дополнительное радиальное смещение измерительного зубчатого колеса подсчитывается по формуле
![]()
где fzkr - действительная величина циклической погрешности частоты k, выявляемая при контроле зуборезного станка;
k - частота циклической погрешности, принимаемая по контролируемому зубчатому колесу.
На эту величину допускается изменять допуск на колебание измерительного межосевого расстояния.
Пример: Зубчатое колесо m = 5 мм, z = 60, atW0 = 21° (например нарезание долбяком), atWm = 20°, 6-я степень точности.
Если в спектре кинематической погрешности зубчатого колеса содержится гармоническая составляющая высокой частоты - циклическая погрешность fzk с частотой k = 90 за оборот зубчатого колеса, то наибольшее дополнительное смещение Df²i будет равно
![]()
По табл. 10 fzk90 = 4,8 мкм, тогда Df²i = 14,0 мкм. Следовательно, допуск f¢i = 20 мкм (по табл. 8) может быть в этом случае расширен до 34,0 мкм.
ПРИЛОЖЕНИЕ 5
Справочное
Примеры использования таблиц настоящего стандарта для назначения норм точности
СОДЕРЖАНИЕ