|
МЕЖГОСУДАРСТВЕННЫЙ
СОВЕТ ПО СТАНДАРТИЗАЦИИ, МЕТРОЛОГИИ И СЕРТИФИКАЦИИ INTERSTATE
COUNCIL FOR STANDARDIZATION, METROLOGY AND CERTIFICATION |
|
|
МЕЖГОСУДАРСТВЕННЫЙ |
ГОСТ (ИСО 10846-4:2003) |
Вибрация
ИЗМЕРЕНИЯ
ВИБРОАКУСТИЧЕСКИХ
ПЕРЕДАТОЧНЫХ ХАРАКТЕРИСТИК УПРУГИХ
ЭЛЕМЕНТОВ КОНСТРУКЦИЙ
В ЛАБОРАТОРНЫХ УСЛОВИЯХ
Часть 4
Динамическая
жесткость неопорных упругих
элементов конструкции для поступательной
вибрации
ISO 10846-4:2003
Acoustics and vibration - Laboratory measurement of vibro-acoustic
transfer properties of resilient elements -
Part 4:
Dynamic stiffness of elements other than resilient supports for
translator motion
(MOD)
|
|
Москва Стандартинформ 2009 |

Предисловие
Цели, основные принципы и основной порядок проведения работ по межгосударственной стандартизации установлены ГОСТ 1.0-92 «Межгосударственная система стандартизации. Основные положения» и ГОСТ 1.2-97 «Межгосударственная система стандартизации. Стандарты межгосударственные, правила и рекомендации по межгосударственной стандартизации. Порядок разработки, принятия, применения, обновления и отмены»
Сведения о стандарте
1. ПОДГОТОВЛЕН Автономной некоммерческой организацией «Научно-исследовательский центр контроля и диагностики технических систем» (АНО «НИЦ КД») на основе собственного аутентичного перевода стандарта, указанного в пункте 4
2. ВНЕСЕН Федеральным агентством по техническому регулированию и метрологии Российской Федерации
3. ПРИНЯТ Межгосударственным советом по стандартизации, метрологии и сертификации (протокол № 33 от 6 июня 2008 г.)
За принятие проголосовали:
|
Краткое наименование страны |
Код страны |
Сокращенное наименование
национального органа по |
|
Беларусь |
BY |
Госстандарт Республики Беларусь |
|
Казахстан |
KZ |
Госстандарт Республики Казахстан |
|
Кыргызстан |
KG |
Кыргызстандарт |
|
Молдова |
MD |
Молдова-Стандарт |
|
Российская Федерация |
RU |
Федеральное агентство по техническому регулированию и метрологии |
|
Таджикистан |
TJ |
Таджикстандарт |
|
Узбекистан |
UZ |
Узстандарт |
|
Украина |
UA |
Госпотребстандарт Украины |
4. Настоящий стандарт является модифицированным по отношению к международному стандарту ИСО 10846-4:2003 «Акустика и вибрация. Измерения виброакустических передаточных характеристик упругих неопорных элементов конструкций в лабораторных условиях. Часть 4. Динамическая жесткость упругих элементов конструкции для поступательной вибрации» (ISO 10846-4:2003 «Acoustics and vibration - Laboratory measurement of vibro-acoustic transfer properties of resilient elements - Part 4: Dynamic stiffness of elements other than resilient supports for translatory motion») путем внесения изменений в положения, объяснение которых приведены во введении к настоящему стандарту, и изменения его структуры. Содержание измененных положений приведено в приложении А. Измененные фразы, слова, показатели и их значения выделены в тексте стандарта курсивом.
Сравнение структуры настоящего стандарта со структурой указанного международного стандарта приведено в дополнительном приложении В.
Международный стандарт разработан ИСО/ТК 43 «Акустика» и ИСО/ТК 108 «Вибрация и удар».
Перевод с английского языка (en).
Официальные экземпляры международных стандартов, на основе которых подготовлен настоящий межгосударственный стандарт и на которые даны ссылки, имеются в Федеральном информационном фонде технических регламентов и стандартов.
Степень соответствия - модифицированная (MOD)
5. Приказом Федерального агентства по техническому регулированию и метрологии от 11 декабря 2008 г. № 387-ст межгосударственный стандарт ГОСТ 31368.4-2008 (ИСО 10846-4:2003) введен в действие в качестве национального стандарта Российской Федерации с 1 октября 2009 г.
6. ВВЕДЕН ВПЕРВЫЕ
Информация о введении в действие (прекращении действия) настоящего стандарта публикуется в указателе «Национальные стандарты».
Информация об изменениях к настоящему стандарту публикуется в указателе «Национальные стандарты», а текст этих изменений - в информационных указателях «Национальные стандарты». В случае пересмотра или отмены настоящего стандарта соответствующая информация будет опубликована в информационном указателе «Национальные стандарты»
СОДЕРЖАНИЕ
Введение
Виброизоляторы различных конструкций применяют для снижения уровня передаваемой вибрации. Примерами могут служить подвески автомобильных двигателей, упругие опоры зданий, устройства крепления и упругие муфты в соединениях валов судовых машин, виброизоляторы, устанавливаемые в предметах бытовой техники.
Настоящий стандарт устанавливает прямой и косвенный методы измерений переходной динамической жесткости линейных упругих неопорных элементов конструкций, таких как сильфоны, гибкие трубопроводы, упругие муфты, силовые кабели и трубные подвески. Настоящий стандарт относится к комплексу стандартов на методы лабораторных измерений виброакустических свойств упругих элементов конструкций, который включает в себя стандарты на общие принципы измерений, прямой и косвенный методы измерений, а также на метод измерений входной динамической характеристики. Общее руководство по выбору соответствующего стандарта приведено в ГОСТ ИСО 10846-1-2002 «Вибрация. Измерения виброакустических передаточных характеристик упругих элементов конструкций в лабораторных условиях. Часть 1. Общие принципы измерений и руководство по их проведению».
Условия испытаний поданному стандарту предусматривают применение, где это необходимо, статического нагружения упругих элементов.
Результаты измерений косвенным методом могут быть использованы для упругих элементов, применяемых в конструкциях в целях снижения передаваемой вибрации в звуковом диапазоне частот (преимущественно свыше 20 Гц). Этот метод не позволяет в полной мере охарактеризовать свойства упругого элемента, работающего в условиях низкочастотной вибрации или повторяющихся ударов.
По сравнению с международным стандартом ИСО 10846-4:2003 в текст настоящего стандарта внесены следующие изменения, выделенные курсивом:
- в разделе 2 международные стандарты заменены аналогичными межгосударственными, дополнительно включен ГОСТ 31368.3-2008, на который в тексте стандарта имеются ссылки;
- не введенное в качестве межгосударственного стандарта Руководство ИСО/МЭК 98:1995 перенесено из раздела «Нормативные ссылки» в структурный элемент «Библиография». Остальные источники из структурного элемента «Библиография» исключены;
- исключено приложение А, устанавливающее руководство по измерению переходной динамической жесткости для угловых колебаний, как недостаточно опробованное, и соответственно изменены обозначения следующих приложений.
ГОСТ 31368.4-2008
(ИСО 10846-4:2003)
МЕЖГОСУДАРСТВЕННЫЙ СТАНДАРТ
|
Вибрация ИЗМЕРЕНИЯ
ВИБРОАКУСТИЧЕСКИХ ПЕРЕДАТОЧНЫХ ХАРАКТЕРИСТИК УПРУГИХ ЭЛЕМЕНТОВ Часть 4 Динамическая жесткость неопорных упругих элементов конструкции для поступательной вибрации Vibration.
Laboratory measurement of vibro-acoustic transfer properties of resilient
elements. Part 4. Dynamic stiffness |
Дата введения - 2009-10-01
1. Область применения
Настоящий стандарт устанавливает два метода определения переходной (передаточной) динамической жесткости упругих неопорных элементов конструкции при поступательном движении. Примерами таких элементов являются сильфоны, гибкие вставки в трубопроводы, упругие муфты, силовые кабели, трубные подвески (см. рисунок 1). Настоящий стандарт не распространяется на упругие элементы, заполненные жидкостью, например водой или маслом.
Примечание 1 - В процессе эксплуатации подвески трубопроводов в отличие от опорных виброизоляторов, которые в основном работают на сжатие, испытывают значительные деформации изгиба и растяжения. Поэтому условия испытаний подвесок трубопроводов существенно отличаются от установленных ГОСТ 31368.3.
|
а) Силовой кабель с кабельной муфтой и фиксирующим устройством |
b) Трубная подвеска |


1 - кабельная муфта; 2 - кабель; 3 - фиксирующее устройство; 4 - неподвижно закрепленная деталь; 5 - упругий элемент; 6 - фиксирующий хомут
Рисунок 1 - Примеры упругих опор с плоскими фланцами или фиксирующими устройствами
Методы, установленные настоящим стандартом, распространяются на упругие элементы с плоскими (не обязательно параллельными) поверхностями фланцев или фиксирующих устройств.
Упругие элементы, на которые распространяется настоящий стандарт, служат для ослабления:
а) вибрации в диапазоне звуковых частот (от 20 Гц до 20 кГц), передаваемой на конструкцию, в результате чего последняя может излучать звук в воздушную, водную или другую среду;
b) низкочастотной вибрации (обычно от 1 до 80 Гц), которая может, например, воздействовать на человека или - при достаточной мощности - вызывать повреждение конструкций.
Применимость методов измерений к упругим элементам как очень маленьких, так и очень больших размеров может быть ограничена размерами испытательной установки.
Настоящий стандарт распространяется на нормальную и поперечную составляющие поступательного движения (по отношению к фланцевым поверхностям или поверхностям фиксирующих устройств).
Прямой метод измерений применим в диапазоне частот от 1 Гц до частоты, ограниченной низшим резонансом рамы или основания испытательной установки, когда их входной импеданс становится сравнимым с входным импедансом испытуемого элемента (обычно для испытательных установок размером около 1 м значение верхней границы частот близко к 300 Гц).
Примечание 2 - На практике нижняя граница диапазона частот измерений может зависеть от вида применяемого вибровозбудителя.
Косвенный метод измерений применим в диапазоне частот, границы которого зависят от особенностей испытательного стенда и конкретного испытуемого объекта. Обычно нижняя граница диапазона частот находится в интервале от 20 до 50 Гц, а верхняя - от 2 до 5 кГц.
Результаты измерений, полученные с помощью данного метода, могут быть использованы:
- для указания характеристик упругих элементов изготовителями и поставщиками в сопроводительной документации к продукции;
- в процессе разработки продукции;
- в системах управления качеством продукции;
- в процессе вибрационных расчетов конструкций.
2. Нормативные ссылки
В настоящем стандарте использованы нормативные ссылки на следующие стандарты:
ГОСТ ИСО 5348-2002 Вибрация и удар. Механическое крепление акселерометров
ГОСТ ИСО 7626-1-94 Вибрация и удар. Экспериментальное определение механической подвижности. Основные положения
ГОСТ ИСО 7626-2-94 Вибрация и удар. Экспериментальное определение механической подвижности. Измерения, использующие одноточечное поступательное возбуждение присоединенным вибровозбудителем
ГОСТ ИСО 10846-1-2002 Вибрация. Измерения виброакустических передаточных характеристик упругих элементов конструкций в лабораторных условиях. Часть 1. Общие принципы измерений и руководство по их проведению
ГОСТ 12090-80 Частоты для акустических измерений. Предпочтительные ряды
ГОСТ 24346-80 Вибрация. Термины и определения
ГОСТ 30652-99 Вибрация. Калибровка датчиков вибрации и удара. Часть 3. Вторичная вибрационная калибровка методом сличения
ГОСТ 31368.3-2008 (ИСО 10846-3:2002) Вибрация. Измерения виброакустических передаточных характеристик упругих элементов конструкций в лабораторных условиях. Часть 3. Косвенный метод определения динамической жесткости упругих опор для поступательной вибрации
Примечание - При пользовании настоящим стандартом целесообразно проверить действие ссылочных стандартов на территории государства по соответствующему указателю стандартов, составленному по состоянию на 1 января текущего года, и по соответствующим информационным указателям, опубликованным в текущем году. Если ссылочный стандарт заменен (изменен), то при пользовании настоящим стандартом следует руководствоваться заменяющим (измененным) стандартом. Если ссылочный стандарт отменен без замены, то положение, в котором дана ссылка на него, применяется в части, не затрагивающей эту ссылку.
3. Термины и определения
В настоящем стандарте применены термины по ГОСТ 24346, а также следующие термины с соответствующими определениями.
3.1 упругий элемент (resilient element): Элемент конструкции, одной из функций которого является ослабление передаваемой вибрации в некотором диапазоне частот.
3.2 упругая опора (resilient support): Упругий элемент, предназначенный для поддерживания части машины, здания или конструкции другого типа.
3.3 испытуемый объект (test element): Упругий элемент, подвергающийся испытаниям, вместе с фланцами и, при необходимости, вспомогательными приспособлениями.
3.4 затормаживающая сила (blocking force) Fb: Сила, приложенная к упругому элементу в точке его соединения с изолируемой конструкцией и обеспечивающая неподвижность этой точки.
3.5 переходная (передаточная) динамическая жесткость (dynamic transfer stiffness) k2,1: Величина, представляющая собой частотнозависимое отношение комплексной силы в заторможенной точке соединения упругого элемента с изолируемой конструкцией (выходная сторона упругого элемента) к комплексному перемещению в точке соединения упругого элемента с источником вибрации (входная сторона упругого элемента) при возбуждении синусоидальной вибрацией, определяемое формулой
k2,1 = F2,b/u1.
Примечание - Значение k2,1 - может зависеть от предварительного статического нагружения, температуры и других условий.
3.6 коэффициент потерь упругого элемента (loss factor of resilient element) η: Величина, представляющая собой отношение мнимой и действительной частей k2,1 - (т.е. тангенс фазового угла k2,1) в диапазоне низких частот, где влияние инерционных сил в упругом элементе незначительно.
3.7 переходная (передаточная) динамическая жесткость, усредненная по частоте (frequency-averaged dynamic transfer stiffness) kav: Величина, выражаемая частотнозависимым средним значением переходной динамической жесткости в полосе частот Df (см. 8.3).
3.8 точечное соединение: Область контакта, которая совершает колебания как поверхность абсолютно жесткого тела.
3.9 нормальная составляющая поступательного движения (normal translation): Поступательная вибрация, действующая перпендикулярно к фланцевой поверхности упругого элемента.
3.10 поперечная составляющая поступательного движения (transverse translation): Поступательная вибрация, действующая перпендикулярно к нормальной составляющей поступательного движения.
3.11 линейность (linearity): Свойство поведения упругого элемента в динамическом режиме, при котором выполняется принцип суперпозиции.
Примечание 1 - Принцип суперпозиции может быть сформулирован следующим образом: если входному воздействию x1(t) соответствует отклик на выходе y1(t), а входному воздействию x2(t) - отклик y2(t), то считают, что принцип суперпозиции выполнен, если входному воздействию a · x1(t) + b · x2(t) будет соответствовать отклик a · y1(t) + b · y2(t) - Данное условие должно выполняться для любых a, b, x(t) и x2(t), где a и b - произвольные константы.
Примечание 2 - Прямая проверка выполнения принципа суперпозиции малопригодна с практической точки зрения, поэтому контроль линейности обычно осуществляют, проводя измерения переходной жесткости в некотором диапазоне входных воздействий. По сути эта процедура является контролем пропорциональности между входным возбуждением и откликом (см. 7.7).
3.12 прямой метод (direct method): Метод, в соответствии с которым измерению подлежат перемещение, скорость или ускорение на входной поверхности и затормаживающая сила на выходной поверхности упругого элемента.
3.13 косвенный метод (indirect method): Метод, в соответствии с которым измерению подлежит передаточная функция по перемещению, скорости или ускорению при нагружении выхода упругого элемента известной массой.
3.14 передаточная функция (transmissibility) Т. Величина, представляющая собой отношение u2/u1 комплексных перемещений на выходной (u2) и входной (u1) поверхностях испытуемого объекта при гармонических колебаниях.
Примечание - Передаточная функция может быть аналогичным образом определена (и иметь то же значение) через скорость v или ускорение a.
3.15 уровень силы (force level) LF: Величина, выражаемая в децибелах (дБ) и определяемая по формуле
![]()
где F2 - средний квадрат силы в заданной полосе частот;
F0 - опорное значение силы, равное 1 мкН1).
____________
1) В отечественной практике часто применяют другие опорные значения для силы и жесткости: 20 мкН и 8 кН · м-1 соответственно, поэтому при рассмотрении данных динамической жесткости, представленных в виде относительных, а не абсолютных величин, необходимо учитывать, какие опорные значения были использованы.
3.16 уровень ускорения (acceleration level) La: Величина, выражаемая в децибелах (дБ) и определяемая по формуле
![]()
где a2 - средний квадрат ускорения в заданной полосе частот;
a0 - опорное значение ускорения, равное 10-6 м/с2.
3.17
уровень переходной (передаточной) динамической жесткости (level
of dynamic transfer stiffness) ![]() : Величина, выражаемая в децибелах
(дБ) и определяемая по формуле
: Величина, выражаемая в децибелах
(дБ) и определяемая по формуле

где |k2,1|2 - средний квадрат переходной динамической жесткости (см. 3.5) в заданной полосе частот;
k0 - опорное значение жесткости, равное 1 Н · м-1.
3.18
уровень переходной (передаточной) динамической жесткости, усредненной по
частоте (level of frequency band averaged dynamic transfer
stiffness)
![]() :
Величина, выражаемая в децибелах (дБ) и определяемая по формуле
:
Величина, выражаемая в децибелах (дБ) и определяемая по формуле

где kav - величина, определенная в 3.7;
k0 - опорное значение жесткости, равное 1 Н · м-1.
3.19 вибрация, передаваемая побочным путем (flanking transmission): Силы и ускорения на выходной поверхности, вызванные вибрационным возбуждением входной поверхности упругого элемента, но переданные не через испытуемый объект, а побочным путем.
4. Теоретические основы метода
Принципы прямого и косвенного методов измерений описаны в ГОСТ ИСО 10846-1.
Основой прямого метода является измерение затормаживающей силы в точке между выходной поверхностью упругого элемента и фундаментом. Фундамент должен быть сконструирован таким образом, чтобы вибрация на выходной стороне испытуемого объекта была значительно ниже, чем на его входной стороне.
Согласно косвенному методу затормаживающую силу непосредственно не измеряют, а определяют по результатам измерений ускорения нагружающей массы m2, предназначенной для погашения вибрации на выходной стороне испытуемого объекта. Эта масса должна быть динамически развязана с другими узлами испытательной установки, чтобы исключить передачу вибрации побочными путями.
В случае гармонических колебаний соотношение между переходной динамической жесткостью (см. 3.5) и измеренным значением передаточной функции (см. 3.14) определяют по формуле
k2,1 ≈ -(2p · f)2 · m2 · T для T << 1, (1)
где индексы 1 и 2 обозначают входную и выходную поверхности испытуемого объекта соответственно.
Получение затормаживающей силы косвенным методом в соответствии с правой частью формулы (1) требует, чтобы эта сила определялась только вибрацией нагружающей массы. Поэтому измерению подлежит вибрация центра тяжести нагружающей массы в направлении действия затормаживающей силы.
5. Испытательная установка
5.1. Общие положения
На рисунках 2 - 8 изображены установки для испытаний неопорных упругих элементов конструкций. Они включают в себя как установки для испытаний единичного образца упругого элемента, так и установки, в которых реализована симметричная (дифференциальная) схема выполнения измерений. В последнем случае испытанию подвергают сразу два упругих элемента одного вида с одинаковыми номинальными характеристиками.
Примечание - Приведенные на рисунках 2 - 8 схемы не исчерпывают всего многообразия возможных конструкций испытательных установок, поэтому их не следует использовать как основание для наложения ограничений на конструктивные решения. Их назначение - служить примерами того, каким образом могут быть реализованы требования, установленные настоящим стандартом (см. раздел 6).
Для реализации измерений в соответствии с настоящим стандартом испытательная установка должна включать в себя блоки, описанные в 5.3. Другие требования к испытательным установкам определены в 5.4 и 5.5.
5.2. Локальные системы координат
Направления нормалей к фланцам (фиксирующим устройствам) на входе и выходе упругого элемента, испытуемого в соответствии с настоящим стандартом, могут не совпадать друг с другом (см. рисунки 7 и 8). У упругих элементов со сложной пространственной конфигурацией эти направления могут даже не лежать водной плоскости. Поэтому для каждой испытательной схемы согласно рисунку 9 вводят локальные системы декартовых координат, в которых определяют силы, моменты сил, поступательные и угловые перемещения. Положительное направление оси z совпадает с направлением нормали к фланцу и обращено вовне от испытуемого объекта. Если испытуемый объект имеет «плоскую» форму, направление оси x как на входной, так и на выходной стороне должно быть перпендикулярным к этой плоскости. Для объектов более сложной формы направления осей x и y устанавливает пользователь настоящего стандарта в соответствии с назначением и условием применения упругого элемента конструкции. Таким образом, определение переходных динамических жесткостей кабелей и гибких рукавов зависит от формы этих элементов и от конструкции испытательной установки.
Применяют следующие обозначения переходных динамических жесткостей:
k2x, 1x; k2x, 1y; k2x, 1z;
k2y, 1x; k2y, 1y; k2y, 1z;
k2z, 1x; k2z, 1y; k2z, 1z;
где подстрочные индексы 2x, 2y, 2z соответствуют осям локальной системы координат в точке определения затормаживающей силы на выходе испытуемого объекта, а подстрочные индексы 1x, 1y, 1z - осям локальной системы координат для перемещений на входе испытуемого объекта.
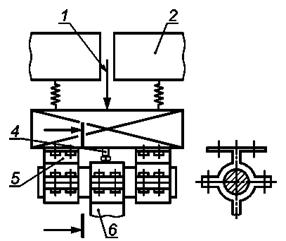
В ряде случаев система обозначений может быть упрощена. Так, для испытуемого объекта, обладающего осевой симметрией (подобного изображенному на рисунке 2), достаточно определить две переходные жесткости: k2,1 (осевая), k2,1 (радиальная).
5.3. Элементы испытательной установки
Испытуемый объект закрепляют на испытательной установке способом, применяемым при установке упругого элемента в конструкции при ее эксплуатации. Это относится также к создаваемой постоянной статической нагрузке и применяемым устройствам крепления на входной и выходной сторонах объекта. Вспомогательные приспособления рассматривают как часть испытуемого объекта (см. 3.3).
Примечание - Упругие элементы, характеризующиеся существенно нелинейной нагрузочной кривой (графиком зависимости смещения от статической нагрузки), демонстрируют сильную зависимость отклика от приложенной статической нагрузки также и в динамическом режиме. Однако в данном случае, в отличие от упругих опор, на которые распространяется ГОСТ 31368.3, статическую нагрузку создают, преимущественно, негравитацией. Например, на рисунке 3 b) показана установка для испытания упругих муфт, где предварительная статическая нагрузка создана моментом сил.
5.3.2. Устройства измерения силы
Измерения силы используют в прямом методе измерений. Силу измеряют на выходной стороне упругого элемента с помощью одного или нескольких датчиков силы.
Для создания условий правильного приложения затормаживающей силы может потребоваться специальная плита, размещаемая между испытуемым объектом и датчиками силы (см. рисунок 8).
Примечание - Эта плита служит не только для распределения нагрузки, но и обеспечивает высокую жесткость поверхности в месте установки датчиков вибрации, а также способствует тому, что выходной фланец (фиксирующее устройство) колеблется как единое целое.
5.3.3. Нагружающая масса на выходной стороне
Нагружающую массу используют при косвенном методе измерений. Одно из ее назначений состоит в том, чтобы дать возможность оценить затормаживающую силу по результатам измерения ускорения, с которым движется эта масса. Другое - обеспечить равномерное пространственное распределение вибрации выходного фланца испытуемого объекта во всем диапазоне частот измерений.
5.3.4. Устройства измерения ускорения
Акселерометры устанавливают на входной и выходной сторонах испытуемого объекта, а также на фундаменте испытательной установки. Если точки посередине этих поверхностей недоступны для измерений, то для измерения ускорения каждой из этих поверхностей используют по два или более симметрично расположенных акселерометра, сигналы которых затем усредняют.
В косвенном методе измерений оси акселерометров, используемых для измерений поперечной вибрации нагружающей массы в направлениях x и y, должны проходить через центр масс тела, состоящего из нагружающей массы и выходного фланца испытуемого объекта (см. рисунок 10).
Допускается использовать вместо акселерометров датчики перемещения или скорости при условии выполнения требований к диапазону частот измерений.
5.3.5. Система возбуждения вибрации
Система возбуждения вибрации должна обеспечивать динамическое воздействие на объект испытаний в заданном диапазоне частот. Это может быть реализовано с применением вибровозбудителей разных типов, например:
a) гидравлического вибростенда;
b) одного или нескольких вибровозбудителей электродинамического типа с толкателями;
c) одного или нескольких вибровозбудителей пьезоэлектрического типа.
Для динамической развязки вибровозбудителей и предотвращения передачи вибрации по побочным путям может потребоваться применение вспомогательных виброизоляторов.
5.3.6. Масса распределения возбуждения на входной поверхности
Масса распределения возбуждения на входной поверхности испытуемого объекта выполняет следующие функции:
a) обеспечивает равномерное распределение вибрационного возбуждения по поверхности входного фланца;
b) облегчает создание однонаправленного возбуждения.
Данную массу можно не применять, если испытуемый объект включает в себя жесткий входной фланец, способный обеспечить выполнение вышеуказанных функций.
Возбуждение преимущественно однонаправленного поступательного движения входной поверхности испытуемого объекта является важным требованием к измерению динамической жесткости в соответствии с настоящим стандартом (см. 6.4). Выполнению данного условия могут способствовать:
a) симметричность направления возбуждения и граничных условий масс распределения возбуждения [см. рисунок 2 b)];
b) большая инерционность массы распределения возбуждения [см. рисунок 3 а)].
В некоторых случаях для предотвращения движения в нежелательном направлении необходимо применять дополнительные связи (направляющие движения).
5.4. Подавление нежелательной вибрации
5.4.1. Общие положения
Методы измерений переходной динамической жесткости, установленные настоящим стандартом, предусматривают приложение однонаправленного возбуждения поочередно в направлениях нормальной и поперечной составляющих.
Однако несимметричность направления возбуждения, граничных условий или свойств испытуемого объекта может вызвать появление нежелательных составляющих вибрации, которые значительно исказят результаты измерений. Меры подавления нежелательных составляющих вибрации рассмотрены в 5.4.2 и 5.4.3. Одной из таких мер является использование испытательной установки специального типа с симметричной конфигурацией, предусматривающей установку двух идентичных объектов испытаний с равными номинальными жесткостями. Количественные требования к ограничению нежелательной вибрации приведены в 6.5.
5.4.2. Нормальная составляющая поступательного движения
При возбуждении вибрации в направлении нормальной составляющей основным способом подавления угловых и поперечных колебаний на входной стороне испытуемого объекта является симметричное расположение вибровозбудителя (или пары вибровозбудителей) и применение осесимметричной массы распределения возбуждения.
Тем не менее, форма и физические свойства испытуемого объекта могут способствовать преобразованию поступательного движения в нормальном направлении в движение других форм. В этом случае существенно уменьшить нежелательные составляющие движения помогает использование массы распределения возбуждения с намного более высокими значениями входных импедансов для поперечных и угловых колебаний в точке контакта с испытуемым объектом, чем соответствующие значения входных импедансов испытуемого объекта [см., например, рисунок 8 а)].
Другим способом подавления нежелательных составляющих входного возбуждения является использование симметричной испытательной установки с двумя номинально идентичными испытуемыми объектами или установки, имеющей направляющую систему со стороны массы распределения возбуждения. Такие установки не показаны на рисунках, но они аналогичны установкам для возбуждения поперечной составляющей, приведенным на рисунках 2 b), 3 а) и 5.
5.4.3. Поперечная составляющая поступательного движения
При возбуждении вибрации в поперечном направлении неизбежно наблюдается ее связь с угловыми колебаниями входной поверхности испытуемого объекта.
Существует ряд способов снижения вибрации в нежелательных направлениях, примеры которых приведены на рисунках, указанных далее. На рисунках 2 b), 6 и 8 d) изображены испытательные установки симметричной конфигурации с двумя номинально идентичными испытуемыми объектами. На рисунках 3 а) и 4 изображены испытательные установки с направляющими устройствами, позволяющие уменьшить угловые колебания испытуемого объекта1). На рисунке 7 b) изображена установка без направляющих устройств. В этой установке ограничение нежелательных составляющих вибрации достигается применением симметричной массы распределения возбуждения с передачей на него поступательного возбуждения от вибровозбудителя точно через центр тяжести. В диапазоне частот, в котором импедансы данного узла для поперечных и угловых колебаний существенно превышают соответствующие значения для испытуемого объекта и пружин для динамической развязки масс, вибрация массы распределения возбуждения будет преимущественно однонаправленной.
___________
1) В отечественной практике в качестве такого устройства используют вспомогательные виброизоляторы, поперечная жесткость которых примерно равна поперечной жесткости испытуемого изделия. При этом измерение динамической жесткости испытуемого изделия выполняют на частотах выше собственных частот поступательных и угловых колебаний массы распределения возбуждения на вспомогательных виброизоляторах и испытуемом изделии.
Принципиально другим способом является активное подавление нежелательной вибрации с использованием системы, состоящей из нескольких вибровозбудителей, датчиков вибрации и системы управления для коррекции возбуждения.
5.5.1. Общие положения
Согласно 5.3.1 испытуемый объект должен быть закреплен на испытательной установке способом, характерным для крепления упругого элемента в реальной конструкции. Это может потребовать принятия специальных мер. Общие вопросы, связанные с такими дополнительными мерами, рассмотрены в 5.5.2 - 5.5.5. В указанных пунктах продемонстрирован также общий подход к решению проблем, связанных со спецификой испытуемого объекта, который следует использовать и в ситуациях, не рассмотренных в настоящем стандарте. Все решения, связанные со спецификой испытуемого объекта, должны быть подробно отражены в протоколе испытаний и наглядно свидетельствовать о том, что условия проведения испытаний соответствовали условиям эксплуатации упругого элемента в составе конструкции.
5.5.2. Предварительное нагружение статическим моментом сил
Передаточные свойства упругих муфт, используемых в валопроводах (например на судах), часто в значительной степени зависят от приложенной постоянной нагрузки. Поэтому измерения переходной динамической жесткости таких объектов следует проводить в условиях предварительного нагружения соответствующим статическим моментом. На рисунке 3 b) показан пример создания такой нагрузки.

а) Испытательная установка с рамой и возбуждением в осевом направлении

b) Испытательная
установка симметричной конфигурации с двумя номинально
идентичными испытуемыми объектами и возбуждением в поперечном направлении
1 - вибровозбудитель; 2 -
масса распределения возбуждения; 3 - фланец; 4 - гибкая часть
муфты; 5 - нагружающая масса;
6 - вспомогательный виброизолятор; 7 - устройство для создания
статического момента [см. рисунок 3 b)]
Рисунок 2 -
Лабораторная испытательная установка для измерений переходной динамической
жесткости упругой муфты косвенным методом с применением моментной статической
нагрузки

а) Возбуждение в радиальном направлении на испытательной установке с рамой [см. рисунок 2 а)]
|
|
|


b) Нагрузка моментом сил
1 - вибровозбудитель; 2 -
тонкая пластина распределения возбуждения с направляющей системой;
3 - массивный блок распределения возбуждения с подавлением угловых
колебаний; 4 - муфта;
5 - входная сторона; 6 - выходная сторона; 7 -
пневмоцилиндр
Рисунок 3 - Фрагменты испытательной установки, изображенной на рисунке 2

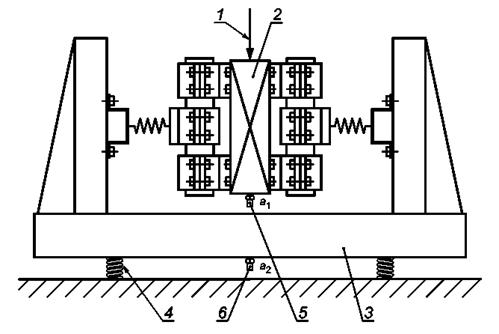
1 - вибровозбудитель; 2 -
поперечина; 3 - вспомогательный виброизолятор; 4 - масса
распределения возбуждения;
5 - испытуемый элемент с хомутом и поддерживающей скобой; 6 -
жесткий цилиндр с фиксирующими хомутами;
7 - нагружающая масса; 8 - регулируемая пневмопружина; 9 -
датчик нагрузки; 10 - фундамент
Рисунок
4 - Лабораторная испытательная установка для измерений косвенным методом
переходной
динамической жесткости трубной подвески с гравитационной нагрузкой (общий вид
установки
для возбуждения нормальной составляющей; трубная подвеска установлена «вверх
ногами»)
|
а) Входная сторона; возбуждение в нормальном направлении |
b) Входная сторона; возбуждение в поперечном направлении |
|
с) Выходная сторона; возбуждение в нормальном направлении |
d) выходная сторона; возбуждение в поперечном направлении |



1 - вибровозбудитель; 2 -
поперечина; 3 - направляющая система (необязательный элемент);
4 - акселерометр (измерение а1); 5 - фиксирующие
хомуты для массы распределения возбуждения;
6 - хомут в составе испытуемого объекта; 7 - скоба трубной
подвески; 8 - акселерометр (измерение а2);
9 - акселерометр (измерение а3); 10 - датчик нагрузки
Рисунок 5 - Фрагменты испытательной установки, изображенной на рисунке 4
1 - вибровозбудитель; 2 -
масса распределения возбуждения; 3 - нагружающая масса;
4 - вспомогательный виброизолятор; 5 - акселерометр (измерение а1);
6 - акселерометр (измерение а2)
Рисунок 6 - Лабораторная испытательная установка для измерений косвенным методом переходной динамической жесткости трубной подвески (симметричная конфигурация с использованием двух номинально идентичных испытуемых объектов)
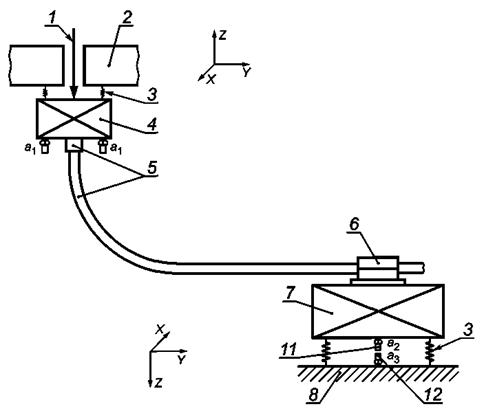
а) Общий вид; возбуждение в нормальном направлении

b) Возбуждение в поперечном направлении
1 - вибровозбудитель; 2 - рама; 3 - вспомогательный виброизолятор; 4 - масса распределения возбуждения; 5 - кабель с соединительной муфтой; 6 - фиксирующее устройство; 7 - нагружающая масса; 8 - жесткий фундамент; 9 - кабели; 10 - акселерометр (измерение а1); 11 - акселерометр (измерение а2); 12 - акселерометр (измерение а3); 13 - входная сторона; 14 - выходная сторона
Рисунок 7 - Лабораторная испытательная установка для измерений косвенным методом переходной динамической жесткости пучка кабелей

а) Измерение затормаживающей силы на выходной стороне
|
b) Измерение силы сдвига на выходной стороне при поперечном возбуждении |
с) Измерение силы на выходной стороне с применением направляющей системы |



d) Симметричная конфигурация для двух пучков труб при однонаправленном поперечном возбуждении
1 - фиксирующее устройство; 2
- плита распределения силы на выходной стороне; 3 - датчик силы
(измерение F2);
4 - жесткий фундамент; 5 - акселерометр (измерение а2);
6 - вибровозбудитель; 7 - нагружающая масса
Рисунок 8 -
Лабораторная испытательная установка для измерений прямым методом
переходной динамической жесткости пучка кабелей

Рисунок 9 - Декартова система координат сил, моментов, перемещений и угловых перемещений

1 - центр масс нагружающей массы; 2
- центр масс фланца;
3 - центр масс тела, состоящего из фланца и нагружающей массы
Примечание 1 - Расстояние между центрами масс нагружающей массы и фланца равно с.
Примечание 2 - Расстояние между центрами масс нагружающей массы и составного тела равно b;
![]()
Рисунок 10 - Пример расположения центра масс тела, включающего в себя нагружающую массу и выходной фланец испытуемого объекта
Поворот массы распределения возбуждения на постоянный угол может быть реализован, например, использованием двух пневматических или гидравлических цилиндров, динамически развязанных с этой массой через вспомогательные виброизоляторы. При этом статическому повороту нагружающей массы препятствуют вспомогательные виброизоляторы и ограничители, установленные на фундаменте.
В испытательной установке, изображенной на рисунке 2 а), ось вращения упругой муфты расположена вертикально. Данное решение позволяет использовать одну и ту же рамную конструкцию для испытания объектов разных типов (см., например, ГОСТ 31368.3), хотя при этом расположение испытуемого объекта может не соответствовать условиям применения данного узла на практике. Тем не менее, такое допущение возможно, если приняты меры, позволяющие исключить воздействие на испытуемый объект чрезмерной гравитационной нагрузки.
5.5.3. Вспомогательные приспособления
Испытуемый объект, не имеющий плоских фланцев, должен быть снабжен соответствующими устройствами для его крепления к массе распределения возбуждения и нагружающей массе. На рисунках 4 - 8 показано, как это реализовано в отношении кабельной подвески и пучка кабелей.
Трубную подвеску можно испытывать в положении «вверх ногами». Для соединения с массой распределения возбуждения используют жесткий цилиндрический прут, соединенный с подвеской через фиксирующий хомут [см. рисунок 5 а)]. И прут, и хомут рассматривают как составную часть подвески. В свою очередь, прут посредством, например, двух хомутов жестко соединяют с массой распределения возбуждения. Хомут, входящий в состав трубной подвески, может иметь внутри мягкую прокладку, если такое предусмотрено обычными условиями применения данного узла, соединен с нагружающей массой или пластиной распределения затормаживающей силы посредством устройства, типичного для крепления данной подвески на практике [см. рисунок 5 b)].
Кабель или пучок кабелей соединяют с массой распределения возбуждения, а также с нагружающей массой или пластиной распределения затормаживающей силы с использованием типовых устройств крепления (см. рисунки 7 и 8).
5.5.4. Гравитационная нагрузка трубной подвески
Трубная подвеска должна быть испытана в растянутом состоянии, характерном для ее применения на практике. При использовании косвенного метода измерений такая нагрузка может быть создана, например, посредством нагружающей массы. При этом следует избегать перегрузки, для чего могут быть использованы компенсирующие устройства, например в виде регулируемого пневматического амортизатора, противодействующего силе тяжести нагружающей массы (см. рисунок 4). В примере, показанном на рисунке 6, применен другой принцип создания постоянной нагрузки. В каждом конкретном случае пользователь настоящего стандарта должен сам определить, какой способ статического нагружения ему следует использовать.
5.5.5. Испытуемый объект с газовым наполнением
Если гибкий рукав или сильфон при их применении должны быть заполнены газом, то при испытаниях внутри данных узлов должно быть создано соответствующее давление. Соединение испытуемого объекта с оборудованием, создающим это давление, не должно оказывать влияние на результаты измерений. В протоколе испытаний должно быть указано, какое оборудование было использовано для создания необходимого давления внутри объекта испытаний и какие меры приняты для того, чтобы работа данного оборудования не влияла на результаты измерений.
6. Критерии соответствия испытательной установки требованиям испытаний
Для каждой испытательной установки характерен свой диапазон частот проведения испытаний. Одно из ограничений связано с номинальным диапазоном частот, на работу в котором рассчитан применяемый вибровозбудитель.
В случае применения прямого метода измерений еще одно ограничение связано с требованием, чтобы сила, передаваемая через упругий элемент на фундамент, была приблизительно равна затормаживающей силе.
Измерения, проведенные в соответствии с настоящим стандартом, достоверны только на частотах, где выполнено условие
![]() (2)
(2)
где a1 - ускорение на входном фланце испытуемого объекта;
a2 - ускорение на выходном фланце или пластине распределения выходной силы.
Примечание - Причиной того, что разность DL1,2 недостаточно велика, может быть недостаточное рассогласование импедансов испытуемого объекта и фундамента испытательной установки или передача значительной части вибрационной энергии побочным путем.
В случае применения косвенного метода измерений ограничения связаны с условием применимости формулы (1). Точность результатов измерений косвенным методом, установленным настоящим стандартом, должна быть не ниже 1 дБ (т.е. в пределах 12 % расчетного значения жесткости). Это требование может быть выполнено только в определенном диапазоне частот f2 < f < f3. Нижняя граничная частота диапазона f2 зависит от низкочастотных резонансов испытательной установки и составляет обычно от 20 до 50 Гц. Верхнюю граничную частоту f3 определяют динамические свойства нагружающей массы. Обычно эта частота находится в диапазоне от 2 до 5 кГц.
Одним из условий обеспечения требуемой точности является рассогласование импедансов испытуемого объекта и нагружающей массы в направлении действия затормаживающей силы. Результаты измерений в соответствии с настоящим стандартом можно считать достоверными только в том диапазоне частот, где удовлетворяется то же неравенство (2), но в данном случае a1 - ускорение на входной стороне испытуемого объекта, а a2 - ускорение нагружающей массы.
На частотах ниже некоторой частоты f2 неравенство (2) будет нарушаться вследствие резонансов системы, состоящей из испытуемого объекта, массы распределения возбуждения, нагружающей массы и вспомогательных виброизоляторов для динамической развязки масс. Как правило, чем выше нагружающая масса m2, тем меньше значение f2.
Примечание - Собственные частоты колебаний испытательной установки могут быть определены с использованием соответствующего программного обеспечения для расчета колебаний системы, состоящей из нескольких жестких тел с упругими связями. Нижняя граница диапазона частот f2 должна быть примерно в три раза больше высшей частоты собственных колебаний (включая угловые колебания), которые могут повлиять на результаты измерений исследуемой составляющей динамической жесткости испытуемого объекта. Тем не менее, на определенных частотах, значение которых больше f2, неравенство (2) может не соблюдаться. Помимо несовершенства испытательной установки это может быть связано с повышением на данных частотах жесткости испытуемого объекта вследствие внутренних резонансов.
Другим условием применимости уравнения (1) является выполнение предположения, что нагружающая масса колеблется как жесткое тело массы т2. От размеров и формы нагружающей массы может зависеть значение верхней границы диапазона измерений f3. Данный вопрос рассмотрен в 6.3.
6.2. Измерение затормаживающей силы в прямом методе измерений
В случае проведения измерений прямым методом масса между испытуемым объектом и датчиками силы является причиной систематической погрешности измерений затормаживающей силы. Разность между затормаживающей силой Fb и измеренной силой F2 приблизительно равна т0 · а2.
Масса m0, кг, представляющая собой сумму массы выходного фланца испытуемого объекта, масс пластины распределения выходной силы и половины датчиков силы, должна удовлетворять следующему неравенству
![]() (3)
(3)
Примечание 1 - Неравенство (3)
эквивалентно требованию ![]()
Примечание 2 - Если неравенство (3) не выполняется, необходимо уменьшить т0.
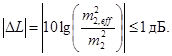
6.3. Определение верхней границы диапазона частот f3 в косвенном методе измерений
6.3.1. Эффективная масса
Ограничение диапазона в области высоких частот для косвенного метода измерений обусловлено тем, что выше некоторой частоты нагружающую массу, используемую для измерения затормаживающей силы, уже нельзя рассматривать как жесткое тело. В области частот выше f3 вместо формулы (1) справедливо следующее выражение
![]() (4)
(4)
где т2,eff - эффективная масса нагружающей массы.
Эффективная масса - это частотнозависимое отношение вынуждающей силы, действующей со стороны упругого элемента на нагружающую массу, к ускорению a2 нагружающей массы [см. рисунок 12 а)]. Значение этой динамической характеристики упругого элемента зависит от направления и области возбуждения, а также от места установки акселерометров.
Результаты измерений, проведенных в соответствии с настоящим стандартом, представляют в диапазоне частот f £ f3, а верхнюю границу диапазона частот выбирают согласно 6.3.2 и 6.3.3.
6.3.2. Применение нагружающей массы с заданными свойствами
На рисунке 11 приведены номограммы для характеристик жестких стальных блоков кубической (со стороной r) или цилиндрической (диаметром d и высотой h, d = h) формы, используемых в качестве нагружающей массы.
Если такие блоки применяют в испытательной установке, то по формуле (1) можно вычислить переходную динамическую жесткость в диапазоне f £ f3, где в качестве f3 берут значение, указанное на номограмме рисунка 11 а) для конкретного размера стального блока.

а) Зависимость f3 от размеров стального блока

b) Зависимость f3 от массы стального блока
1 - для блока в виде сплошного цилиндра; 2 - для блока в виде сплошного куба
Рисунок 11 - Номограммы для стальных блоков кубической или цилиндрической формы
Примечание - На рисунке 11 b) показано соотношение между f3 и массой т2 блока кубической (цилиндрической) формы. Масса т2 (по возможности, минимальная) может быть выбрана из соображений получения требуемого значения нижней границы диапазона частот f2. При этом по номограмме рисунка 11 b) для заданного значения т2 определяют f3, а затем для полученного значения f3 по номограмме рисунка 11 а) определяют диаметр d или размер ребра r стального блока.
6.3.3. Определение эффективной массы экспериментальным путем
6.3.3.1. Если применение в качестве нагружающей массы стального блока, размеры, форма или масса которого соответствуют приведенным на номограммах рисунка 11, по какой-либо причине невозможно, то для этих целей используют блоки других форм и размеров. В этом случае значение f3 определяют экспериментально. Чтобы избавиться от связи между поступательными и угловыми движениями, нагружающая масса должна обладать симметрией, т.е. основные оси инерции нагружающей массы должны совпадать с осями декартовой системы координат, центр которой помещен в центр нагружающей массы, а направления осей совпадают с направлениями нормальной и поперечной вибраций.
Для выполнения данного требования выбирают блоки из однородного материала одной из следующих форм: сплошной цилиндр, пустотелый цилиндр, параллелепипед или их сочетание.
Для нахождения f3 в соответствии с нижеизложенным методом определяют эффективную массу т2,eff как функцию частоты в соответствии с 6.3.3.2. За f3 принимают минимальное значение частоты, при которой разность между т2,eff и т2 составляет более 12 % (1 дБ).
После этого переходную динамическую жесткость испытуемого объекта вычисляют по формуле (1). Полученные значения будут достоверны только в диапазоне частот f £ f3, для которого справедливо неравенство
 (5)
(5)
6.3.3.2. Метод определения эффективной массы проиллюстрирован рисунком 12. На рисунке 12 а) и b) показаны примеры испытуемых объектов, соединенных с нагружающей массой через область контакта площадью S. В процессе испытаний измеряют ускорения в вертикальном (a2,ver) или горизонтальном (a2,hor) направлениях (в зависимости от направления возбуждения) на входной стороне упругого элемента.
|
а) |
b) |
|
c) |
d) |
|
e) |
f) |
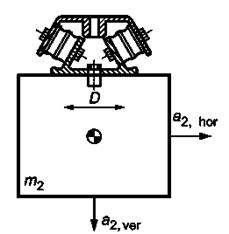

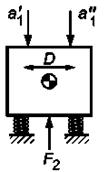



Рисунок 12 - Экспериментальное определение эффективной массы
На рисунке 12 с) и d) показано, как устанавливают акселерометры для определения эффективной массы при возбуждении в вертикальном направлении. В отсутствие испытуемого объекта нагружающая масса поддерживается вспомогательными виброизоляторами. Собственная частота этой массово-упругой системы должна быть менее 10 Гц.
С
той стороны, где в процессе испытаний измеряют a2,ver, прилагают
вынуждающую силу F2 через центр тяжести нагружающей
массы в диапазоне частот испытаний. В пределах области контакта площадью S симметрично
относительно вертикальной оси, проходящей через центр масс, на расстоянии ![]() друг от
друга устанавливают два акселерометра. Эффективную массу определяют по формуле
друг от
друга устанавливают два акселерометра. Эффективную массу определяют по формуле
 (6)
(6)
На
рисунке 12 e) и f) показано, как устанавливают
акселерометры для определения эффективной массы при возбуждении в
горизонтальном направлении. Метод аналогичен описанному для возбуждения в
вертикальном направлении, но с приложением вынуждающей силы через центр масс в
горизонтальном направлении и при другом расположении акселерометров (и
направлений измерений ускорения) в области контакта. Расстояние между
акселерометрами должно быть таким же: ![]() Эффективную массу также определяют по
формуле (6).
Эффективную массу также определяют по
формуле (6).
Если на низких частотах (f < 40 Гц) отклонение m2,eff от m2 превышает 1 дБ, это не следует принимать во внимание при определении f3, поскольку такое отклонение может быть вызвано поведением массово-пружинной системы, а не нежесткостью нагружающей массы.
При возбуждении вибрации в горизонтальном направлении следует особое внимание уделить точности расположения вибровозбудителя, чтобы избежать появления нежелательных угловых колебаний. В противном случае оценка, полученная по формуле (6), будет смещена относительно истинного значения и неравенство (5) не будет выполнено даже на более низких частотах.
Измерение сил и ускорений проводят в соответствии с ГОСТ ИСО 7626-1 и ГОСТ ИСО 7626-2.
Расширение диапазона частот измерений переходной динамической жесткости требует понижения нижней границы диапазона f2 (т.е. нагрузочная масса должна быть большой) и повышения верхней границы f3 (т.е. нагрузочная масса должна быть минимальных размеров). Поэтому желательно использовать материал с высокой плотностью и высокой скоростью распространения волн (такой, как сталь). При необходимости можно использовать различные нагружающие массы, для каждой из которых измерения проводят в своем диапазоне частот.
Примечание - Использование вместо реальной нагружающей массы ее физической модели позволяет облегчить проведение испытаний по определению f3 и уменьшить их стоимость. Модель должна быть изготовлена из того же материала и иметь ту же форму, но все ее линейные размеры могут быть в n раз меньше, чем для реального объекта. В этом случае значение f3 для реальной нагружающей массы будет в n раз меньше значения, полученного в результате испытания модели.
6.4. Вибрация, передаваемая побочным путем
Для многих реальных испытательных установок точность метода ограничивается тем, что значительная часть вибрации передается побочным путем - воздушным или по материалу конструкции. В условиях большого разнообразия применяемых испытательных установок невозможно определить единый метод контроля путей распространения вибрации. Поэтому способ такого контроля должен быть установлен пользователем настоящего стандарта и отражен в протоколе испытаний.
6.5. Нежелательные составляющие входной вибрации
Входная вибрация в направлениях, отличающихся от направления прилагаемого возбуждения, должна быть подавлена согласно 5.4. Результаты измерений, проведенных в соответствии с настоящим стандартом, считают достоверными только в том случае, если уровень входного ускорения a в направлении возбуждения превышает уровень ускорения a' в любом направлении, перпендикулярном к заданному, не менее чем на 15 дБ, т.е.
Точки, в которых следует проводить измерения составляющих колебаний для проверки выполнения указанного требования (7), показаны на рисунке 13.
Для возбуждения в нормальном направлении входная вибрация а1z действует в направлении возбуждения в месте контакта массы распределения возбуждения и входного фланца испытуемого объекта. Нежелательные составляющие a¢1x и a¢1y должны быть измерены на краю массы распределения возбуждения в плоскости контакта массы распределения возбуждения и входного фланца испытуемого объекта [см. рисунок 13 а)].
Для возбуждения в поперечном направлении (x или y) входную вибрацию в направлении возбуждения (a1x или a1y) измеряют вдоль горизонтальной оси симметрии массы распределения возбуждения. Нежелательные составляющие вибрации a¢1z и a¢1y или a¢1x измеряют на краю массы распределения возбуждения [см. рисунок 13 b)].
Если при наличии массивного входного фланца у испытуемого объекта массу распределения возбуждения не используют (см. 5.3.6), то должна быть определена схема расположения датчиков, аналогично показанной на рисунке 13, для контроля подавления нежелательных составляющих вибрации в соответствии с неравенством (7).
|
а) Возбуждение в нормальном направлении (z) |
b) Возбуждение в поперечном направлении (x или y) |
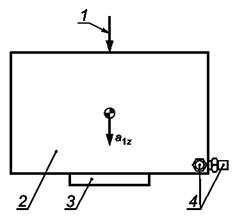

1 - вибровозбудитель; 2 -
масса распределения возбуждения; 3 - входной фланец испытуемого объекта;
4 - датчики измерения нежелательной вибрации a'1x и a'1у; 5 - датчики измерения
нежелательной вибрации a'1z и a'1у или a'1x
Рисунок 13 - Точки измерений для контроля нежелательных составляющих вибрации
6.6. Акселерометры
Акселерометры должны быть калиброваны в диапазоне частот измерений и иметь во всем диапазоне частот постоянный коэффициент преобразования в пределах 0,5 дБ. Калибровка должна быть проведена в соответствии с ГОСТ 30652.
Акселерометры не должны быть чувствительны к изменениям факторов окружающей среды, таким как температура, влажность, электромагнитные и акустические поля, деформация основания. Коэффициент преобразования в поперечном направлении должен быть менее 5 %.
Если вместо акселерометров используют датчики скорости или перемещения, к ним предъявляют те же требования, что и к акселерометрам.
6.7. Датчики силы
Датчики силы должны быть калиброваны в диапазоне частот измерений и иметь во всем диапазоне частот постоянный коэффициент преобразования в пределах 0,5 дБ. Калибровку проводят методом нагрузки массой, установленным в ГОСТ ИСО 7626-1.
Если для датчика силы предусмотрена возможность регулировки передаточной функции, то результирующий коэффициент преобразования должен удовлетворять требованию постоянства в пределах 0,5 дБ.
Датчики силы не должны быть чувствительны к изменениям внешних воздействующих факторов, таким как температура, влажность, электромагнитные и акустические поля, деформация основания. Коэффициент преобразования в поперечном направлении должен быть менее 5 %.
6.8. Суммирование сигналов
При необходимости суммирования сигналов с датчиков силы или акселерометров погрешность выполнения данной операции не должна превышать 5 %. Одним из способов обеспечить выполнение этого требования является применение датчиков одного типа с коэффициентами преобразования, отличающимися друг от друга не более чем на 5 %. Другой способ - выполнять суммирование с помощью многоканального анализатора. В этом случае для компенсации разности коэффициентов преобразований датчиков, превышающей 5 %, и разности коэффициентов усиления по каждому каналу должны быть введены соответствующие поправки (см. 6.9).
Используемые анализаторы сигналов в узкой полосе частот должны удовлетворять следующим требованиям:
a) разрешение по частоте должно обеспечивать получение в спектре сигнала, по крайней мере, пяти спектральных линий в третьоктавных полосах частот, покрывающих диапазон частот измерений;
b) разность частотных характеристик каналов (включая устройства формирования сигналов), используемых для измерений ускорений на входной и выходной поверхностях испытуемого объекта, не должна превышать 0,5 дБ для измерений с тем же разрешением по частоте, что используется при испытании упругих элементов конструкции. В противном случае для компенсации разницы в коэффициентах усиления каналов должны быть введены соответствующие поправки.
Один из способов сравнения коэффициентов усиления каналов состоит в следующем. На вход обоих каналов подают один и тот же широкополосный сигнал (например, белый шум). После этого определяют отношение уровней сигналов в узкой полосе частот, которое не должно превышать 0,5 дБ. Если это условие не выполняется, то полученное отношение используют в качестве корректирующего множителя при измерениях динамической жесткости.
7. Испытания
7.1. Установка испытуемого объекта
Испытуемый объект соединяют с массой распределения возбуждения и нагружающей массой или пластиной распределения выходной силы таким образом, чтобы обеспечить надежный контакт с поверхностями этих масс по всей площади фланцев. Те части, которые не являются составной частью упругих элементов в процессе их эксплуатации, должны быть демонтированы.
Для улучшения контактов испытуемого объекта с массами распределения возбуждения и нагружения может быть применена консистентная смазка или двусторонняя клейкая лента. Однако в последнем случае это может привести к искажению результатов в области высоких частот. Если поверхность фланцев велика, то ее выравнивание может улучшить качество измерений.
Для испытуемых объектов, содержащих резиновые элементы, может наблюдаться их медленное проседание под действием нагрузки. В этом случае к опоре должна быть приложена статическая нагрузка до 100 % ее допустимого значения. Измерения можно проводить только после того как изменение прогиба опоры под действием указанной нагрузки будет не более 10 % в день.
7.2. Установка датчиков силы и пластины распределения силы
При использовании прямого метода измерений применяют один или несколько датчиков силы в зависимости от размеров и формы испытуемого объекта, а также от максимально допустимой нагрузки для этих датчиков.
Пластина распределения силы должна быть как можно более легкой, иметь минимальные размеры и в то же время быть достаточно жесткой, чтобы не возникали резонансы в диапазоне частот измерений. Минимальный продольный размер пластины определяется размером испытуемого объекта.
Для проверки того, что система измерения силы ведет себя как жесткое тело, ее возбуждают, прилагая точечную силу по центру этой системы. Передаточная функция системы (измеряемая с помощью калиброванного датчика силы на одной стороне и штатных датчиков силы испытательной установки на другой) должна быть плоской во всем диапазоне частот измерений.
7.3. Установка акселерометров
Акселерометры устанавливают на входной и выходной сторонах испытуемого объекта для измерения ускорений a1, a2 и a3. Крепление акселерометров должно быть жестким и соответствовать ГОСТ ИСО 5348.
7.4. Установка вибровозбудителя
Для передачи возбуждения от вибровозбудителя к массе распределения возбуждения может потребоваться толкатель. Толкатель должен быть достаточно жестким, чтобы не допустить появления изгибных колебаний, которые могут ухудшить качество измерений вследствие появления вибрации в поперечном направлении и излучения звуковой энергии через воздух.
7.5. Генератор сигналов
Генератор сигналов должен производить сигналы одного из следующих видов:
- синусоидальные сигналы с дискретно изменяющимися частотами;
- синусоидальные сигналы с плавной перестройкой по частоте;
- синусоидальные сигналы с периодической перестройкой по частоте;
- случайные сигналы в узкой полосе частот.
Производимый сигнал должен быть достаточно длительным, для того чтобы обеспечить его усреднение. Изменение результата измерений после удвоения времени усреднения не должно превышать 0,1 дБ. При использовании сигналов с дискретным изменением или периодической перестройкой частоты шаг изменения частоты или расстояние между соседними составляющими в спектре сигнала должны быть такими, чтобы при анализе в каждой третьоктавной полосе было не менее пяти частотных составляющих во всем исследуемом диапазоне частот.
7.6. Измерения
7.6.1. Общие положения
Измерения проводят для одного или нескольких представительных режимов нагружения.
Измерения проводят для одного или нескольких представительных значений температуры окружающей среды. В процессе измерений заданное значение температуры контролируют. До проведения испытаний с заданной температурой окружающей среды испытуемый объект выдерживают при этой температуре (в пределах 3 °C) в течение не менее 24 ч.
Если ожидается высокая чувствительность свойств материала испытуемого объекта (например, демпфирования) к изменению температуры или влажности, на эти параметры устанавливают допуски, позволяющие обеспечить неопределенность измерений по 7.6.3.
Перед испытанием определяют и фиксируют уровень La2 при отсутствии возбуждения. В процессе испытаний (если иное не определено) создаваемая вибровозбудителем вибрация должна превышать этот уровень не менее чем на 15 дБ во всех диапазонах частот измерений.
Основные измерения проводят для ускорения a1 на входной поверхности испытуемого объекта, для ускорения a2 на его выходной поверхности и для ускорения a3 на основании испытательной установки. При определении функции динамической жесткости не учитывают результаты измерений, не удовлетворяющие требованиям 6.5.
7.6.2. Достоверность результатов измерений
Результаты измерений считают достоверными при выполнении следующих условий:
a) поведение испытуемого объекта в диапазоне возбуждения остается приблизительно линейным (см. 7.7);
b) область контакта опоры с источником вибрации и с конструкцией, на которую передается вибрация, можно считать точечной.
Примечание - Желательно при проведении испытаний измерять функцию когерентности между входным и выходным сигналами, поскольку по ее значению можно судить о появлении тех или иных проблем (низкое отношение сигнал/шум, нелинейность и пр.), приводящих к уменьшению точности измерений.
7.6.3. Неопределенность измерений
Стандартное отклонение воспроизводимости переходной динамической жесткости, измеренной в соответствии с настоящим стандартом, составляет приблизительно 2 дБ (около 26 %). При отсутствии дополнительных сведений об источниках, оказывающих существенное влияние на неопределенность измерений, следует использовать значение расширенной неопределенности на основе вышеуказанного стандартного отклонения для коэффициента охвата, равного двум, как рекомендовано в [1].
Примечание - Стандартное отклонение воспроизводимости может зависеть от частоты. Для получения больших сведений о точности метода рекомендуется проводить межлабораторные сравнительные испытания.
В стандартах на методы измерения динамических характеристик упругих элементов концепция измерения переходной динамической жесткости основана на предположении линейности моделей, описывающих движения этих элементов. В реальных условиях поведение упругих элементов можно считать линейным только в некотором приближении. Поэтому для точного определения того, что можно считать линейным поведением в соответствии с настоящим стандартом, следует рассмотреть достоверность результатов измерений динамической переходной жесткости для разных уровней входного возбуждения.
Проведение испытаний на линейность в полном объеме труднореализуемо с практической точки зрения, поэтому в настоящем стандарте проверка на линейность ограничена контролем пропорциональности входных и выходных сигналов, т.е. постоянством отношения затормаживающей силы к ускорению (перемещению, скорости) возбуждения (см. 3.11, примечания 1 и 2).
Значения переходной динамической жесткости, полученные в соответствии с настоящим стандартом, можно считать достоверными только для диапазона возбуждений, который был рассмотрен при проверке линейности и для которого эта линейность была подтверждена. Верхнюю границу диапазона, для которого данные можно считать достоверными, указывают в протоколе испытаний.
При проверке линейности выполняют следующее:
a) принимают за А третьоктавный спектр входного сигнала заданного уровня;
b) принимают за В третьоктавный спектр сигнала, уровень которого на 10 дБ ниже, чем для спектра А;
c) если уровни переходной динамической жесткости для возбуждений со спектрами А и В отличаются не более чем на 1,5 дБ, считают, что результаты измерений для уровня входного воздействия, равного или ниже А, являются достоверными;
d) если максимальный уровень А, достижимый на данной испытательной установке, ниже уровней входных воздействий, которые имеют место при эксплуатации упругого элемента, эта установка должна быть модифицирована, чтобы получить требуемые уровни входного возбуждения, в противном случае используют другую испытательную установку;
e) если проверка по перечислению с) привела к отрицательным результатам, вышеуказанную процедуру следует повторять для более низких уровней входных воздействий до тех пор, пока не будет установлен диапазон, в котором сохраняется постоянство коэффициента пропорциональности между входным и выходным сигналами.
Диапазон линейности должен быть зафиксирован как максимальное значение уровня входного ускорения в третьоктавной полосе частот, для которого испытания на линейность дали положительный результат.
Примечание - На основе полученных предельных значений входного воздействия в третьоктавных полосах могут быть дополнительно рассчитаны и представлены другие предельные параметры, например максимально допустимое среднеквадратичное значение входного перемещения.
Если проверка линейности для данного испытуемого объекта с использованием вышеуказанного критерия дала отрицательный результат, поведение этого объекта следует рассматривать как нелинейное. На такие объекты метод измерений, установленный настоящим стандартом, не распространяется. Тем не менее, он может быть использован при оценивании свойств упругой опоры для конкретных условий ее применения, например при синусоидальном возбуждении с фиксированной амплитудой.
8. Оценка результатов испытаний
8.1. Оценка переходной динамической жесткости для прямого метода
При использовании прямого метода с измерением затормаживающей силы F2 и ускорения a1 для расчета переходной динамической жесткости необходимо выполнить преобразование ускорения в перемещение.
В случае синусоидальной вибрации
![]() (8)
(8)
Переходная динамическая жесткость на данной частоте f представляет собой комплексную величину с модулем |k2,1(f)| и фазовым углом ф2,1(f).
Для тех же ограничений и требований к точности измерений, что и для k2,1(f), может быть рассчитан коэффициент потерь η(f) (3.6) по формуле
![]() (9)
(9)
Примечание 1 - На высоких частотах испытуемый объект нельзя рассматривать как безмассовую пружину. Поэтому в диапазоне высоких частот величину, определяемую по формуле (9), нельзя рассматривать как характеристику демпфирующих свойств упругого элемента (см. ГОСТ ИСО 10846-1).
Примечание 2 - Если коэффициент потерь мал, то оценка, полученная по формуле (9), становится очень чувствительной к погрешностям измерений. Например, значение коэффициента потерь η(f) = 0,01 соответствует фазовому углу ф = arcfg(η) = 0,57°. В этом случае коэффициент потерь рекомендуется определять по ширине полосы резонанса колебаний упругого элемента.
8.2. Оценка переходной динамической жесткости для косвенного метода
Для косвенного метода измерений переходную динамическую жесткость рассчитывают по формуле (1).
На основании измерений передаточной функции T (т.е. для тех же ограничений и требований к точности измерений) дополнительно определяют коэффициент потерь η(f) (3.6) по формуле
![]() (10)
(10)
Примечание 1 - На высоких частотах испытуемый объект нельзя более рассматривать как безмассовую пружину. Поэтому на высоких частотах величину, определяемую по формуле (10), нельзя рассматривать как характеристику демпфирующих свойств упругого элемента (см. ГОСТ ИСО 10846-1).
Примечание 2 - Если коэффициент потерь мал, то его рекомендуется определять по ширине полосы резонанса (см. 8.1, примечание 2).
8.3. Переходная динамическая жесткость в третьоктавной полосе частот
Значение переходной динамической жесткости, усредненной по частоте в третьоктавной полосе частот, kav определяют по формуле
 (11)
(11)
где суммирование выполняют по пяти и более частотным составляющим.
Примечание 1 - Суммирование квадрата величины выбрано для того, чтобы подчеркнуть пиковые значения динамической жесткости, роль которых обычно наиболее важна.
Примечание 2 - Результат, полученный по формуле (11), хорошо согласуется с данными непосредственного усреднения сигнала анализатором в третьоктавной полосе частот в реальном масштабе времени при условии, что функция спектральной плотности входного перемещения u1 является достаточно плоской.
Примечание 3 - Очевидно, что представление результатов измерений в форме динамической жесткости, усредненной по третьоктавной полосе частот, ведет к свертке информации. Однако при этом теряется информация о фазе частотной характеристики.
Результат измерений представляют в виде уровня переходной динамической жесткости, усредненной по частоте (3.18).
Среднегеометрическую частоту fm третьоктавной полосы частот определяют согласно ГОСТ 12090.
8.4. Представление результатов измерений в третьоктавных полосах частот
Данные об уровнях переходной динамической жесткости в третьоктавных полосах частот могут быть представлены в табличной или графической форме. В таблице приводят среднегеометрические частоты третьоктавных полос и уровни переходной динамической жесткости в децибелах с указанием опорного значения (т.е. 1 Н · м-1).
График частотной характеристики должен включать в себя:
- вертикальную шкалу в масштабе 20 мм на каждые 10 дБ или в единицах измеряемой величины с шагом 101/2;
- горизонтальную шкалу в масштабе 5 мм на третьоктавную полосу.
При печати масштаб может быть увеличен или уменьшен при условии сохранения пропорций. Для удобства восприятия на график может быть нанесена масштабная сетка.
Примечание - Пример представления данных в графическом формате показан на рисунке 14. В дополнение к шкале в децибелах (вертикальная шкала слева) справа приведена вертикальная логарифмическая шкала в ньютонах на метр.
Необходимо четко указывать, для какой динамической характеристики представлены эти данные.

Рисунок 14 - Пример формата графика для представления уровней
переходной
динамической жесткости в третьоктавных полосах частот
8.5. Представление результатов в узких полосах частот
Дополнительно могут быть представлены сведения об амплитудном и фазовом спектрах переходной динамической жесткости, а также коэффициент потерь. Разрешение по частоте для данного представления соответствует использованному при анализе в узких полосах частот.
Результаты измерений модуля динамической жесткости представляют в графическом виде с указанием опорного значения (т.е. 1 Н · м-1). Предпочтительным является следующий формат представления данных:
- вертикальная шкала в масштабе 20 мм на каждые 10 дБ или в единицах измеряемой величины с шагом 101/2;
- горизонтальная шкала в масштабе 15 мм на октавную полосу.
Примечание - В отношении масштаба графика при печати - см. 8.4.
Результаты измерений фазы представляют в графическом виде. Предпочтительным является следующий формат представления данных:
- вертикальная шкала в масштабе 40 мм на диапазон от минус 180° до плюс 180°;
- горизонтальная шкала в масштабе 15 мм на октавную полосу.
Примечание - В отношении масштаба графика при печати - см. 8.4.
Результаты измерений коэффициента потерь представляют в графическом виде. Предпочтительным является следующий формат представления данных:
- вертикальная шкала в масштабе 20 мм на изменение коэффициента потерь η в десять раз;
- горизонтальная шкала в масштабе 15 мм на октавную полосу.
Примечание - В отношении масштаба графика при печати - см. 8.4.
Необходимо четко указывать, какой динамической характеристике по 5.2 соответствуют представленные данные.
9. Регистрируемая информация
Вся необходимая информация о проведенных испытаниях должна быть зарегистрирована, включая:
а) наименование организации, проводившей испытания;
b) сведения об испытуемом объекте, в том числе:
- указание изготовителя, модели, заводского номера;
- описание испытуемого элемента с указанием (где это неочевидно), какие части упругого элемента были подвергнуты испытаниям, а какие перед испытанием были удалены;
- данные, заявленные изготовителем, о возможности упругого элемента уменьшать передаваемую вибрацию;
c) фотографию испытуемого объекта и испытательной установки, описание устройства для создания статической нагрузки;
d) описание массы распределения возбуждения (при ее наличии) и нагружающей массы (размеры, материал, масса), способа их соединения с испытуемым объектом, а также локальных систем координат (см. 5.2);
e) спектры ускорения, используемые для проверок выполнения неравенств (2) и (7) (см. 6.1 и 6.5);
f) статическую нагрузку (в ньютонах или паскалях);
g) температуру окружающей среды (и ее изменения в процессе испытаний) в градусах Цельсия;
h) другие условия, связанные с факторами внешней среды:
- относительную влажность, в процентах;
- выдержку объекта перед испытаниями;
- другие условия, влияющие на результат измерений (например, статический прогиб опоры, наложенные низкочастотные колебания с указанием их амплитуды и частоты);
i) описание сигнала возбуждения;
j) спектр уровней ускорения La1 (или перемещения, если оно является измеряемой величиной) на входной стороне испытуемого объекта;
k) использованные средства измерений и анализ данных с указанием их типа, места расположения, изготовителя, заводского номера, сведений о поверках;
l) результаты измерений переходной динамической жесткости, усредненной в третьоктавных полосах частот;
m) описание условий и результатов проверки на линейность (см. 7.7), включая данные о верхних границах диапазона амплитуд ускорения а1 или перемещения u1 в пределах которых результаты измерений можно считать достоверными;
n) описание проверки влияния фонового шума на результат измерений;
o) описание проверки влияния вибрации, передаваемой побочным путем, на результат измерений;
p) результаты
измерений величины ![]() для определения f3 (см. 6.3);
для определения f3 (см. 6.3);
q) допуск на температуру испытуемого элемента, которому соответствует максимальная неопределенность измерений согласно 7.6.3;
r) узкополосный спектр модуля переходной динамической функции;
s) узкополосный спектр фазы переходной динамической функции;
t) узкополосный спектр коэффициента потерь с указанием (и ссылкой на ГОСТ ИСО 10846-1), что эта величина может быть рассмотрена как достоверная характеристика диссипативных свойств опоры только в области низких частот, где влияние инерционных сил внутри испытуемого объекта незначительно);
u) действительную и мнимую части переходной жесткости;
v) информацию о верхней границе диапазона входного возбуждения (например, в виде максимального среднеквадратичного значения перемещения), в пределах которого результаты измерений считают достоверными.
10. Протокол испытаний
Протокол испытаний должен включать в себя ссылку на настоящий стандарт, а также, по крайней мере, информацию, зарегистрированную согласно разделу 9, перечисления a), b), f), g), k) и l).
Приложение А
(справочное)
Разделы ИСО 10846-4:2003, которые применены в настоящем стандарте с модификацией их содержания
А.1. Нормативные ссылки
Ссылки на международные стандарты, которые приняты в качестве межгосударственных стандартов, заменены ссылками на соответствующие идентичные и модифицированные межгосударственные стандарты. Полный перечень изменений нормативных ссылок приведен в таблице А.1.
Таблица А.1
|
Модификация |
|
|
2. Нормативные ссылки |
Ссылка на ИСО 266:1997 «Акустика. Предпочтительные частоты» заменена ссылкой на ГОСТ 12090-80 «Частоты для акустических измерений. Предпочтительные ряды» (NEQ). Ссылка на ИСО 2041:1990 «Вибрация и удар. Термины и определения» заменена ссылкой на ГОСТ 24346-80 «Вибрация. Термины и определения» (NEQ). Ссылка на ИСО 16063-21:2003 «Методы калибровки датчиков вибрации и удара. Часть 21. Вибрационная калибровка методом сличения» заменена ссылкой на ГОСТ 30652-99 (ИСО 5347-3:1993) «Вибрация. Калибровка датчиков вибрации и удара. Часть 3. Вторичная вибрационная калибровка методом сличения» (NEQ). Ссылка на ИСО 5348:1998 «Вибрация и удар. Механическое крепление акселерометров» заменена ссылкой на ГОСТ ИСО 5348-2002 «Вибрация и удар. Механическое крепление акселерометров» (IDT). Ссылка на ИСО 7626-1:1986 «Вибрация и удар. Экспериментальное определение механической подвижности. Часть 1. Основные определения и преобразователи» заменена ссылкой на ГОСТ ИСО 7626-1-94 «Вибрация и удар. Экспериментальное определение механической подвижности. Основные положения» (IDT). Ссылка на ИСО 7626-2:1990 «Вибрация и удар. Экспериментальное определение механической подвижности. Часть 2. Измерения, использующие одноточечное поступательное возбуждение присоединенным вибровозбудителем» заменена ссылкой на ГОСТ ИСО 7626-2-94 «Вибрация и удар. Экспериментальное определение механической подвижности. Измерения, использующие одноточечное поступательное возбуждение присоединенным вибровозбудителем» (IDT). Ссылка на ИСО 10846-1:1997 «Вибрация. Измерения виброакустических передаточных характеристик упругих элементов конструкций в лабораторных условиях. Часть 1. Общие принципы измерений и руководство по их проведению» заменена ссылкой на ГОСТ ИСО 10846-1-2002 «Вибрация. Измерения виброакустических передаточных характеристик упругих элементов конструкций в лабораторных условиях. Часть 1. Общие принципы измерений и руководство по их проведению» (IDT). Ссылка на ИСО 10846-3:2002 «Вибрация. Измерения виброакустических передаточных характеристик упругих элементов конструкций в лабораторных условиях. Часть 3. Косвенный метод определения динамической жесткости упругих опор для поступательной вибрации» заменена ссылкой на ГОСТ 31368.3-2007 «Вибрация. Измерения виброакустических передаточных характеристик упругих элементов конструкций в лабораторных условиях. Часть 3. Косвенный метод определения динамической жесткости упругих опор для поступательной вибрации» (MOD). |
А.2. Исключенное приложение А международного стандарта
«Приложение А
(рекомендуемое)
Переходная динамическая жесткость для угловых колебаний
Все стандарты комплекса ИСО 10846 рассматривают измерения переходной жесткости только для поступательной вибрации. Однако косвенным методом, установленным настоящим стандартом, могут быть измерены также значения переходной жесткости для угловых колебаний.
Для проведения таких измерений можно воспользоваться руководством, установленным ИСО 10846-3 (приложение А), где представлены теория, принципы измерений и модификация испытательной установки в отношении испытаний упругих опор, но которые легко распространить на испытания неопорных упругих элементов конструкций».
Приложение В
(справочное)
Сравнение структуры международного стандарта со структурой межгосударственного стандарта
Таблица В.1
|
Структура международного стандарта ИСО 10846-4:2003 |
Структура настоящего стандарта |
|
Приложение А |
- |
|
Примечание - Структурные элементы настоящего стандарта и международного стандарта ИСО 10846-3:2002, не указанные в данной таблице, идентичны. |
|
Библиография
|
Руководство ИСО/МЭК 98:1995 |
Руководство по выражению неопределенности измерений |
|
|
(ISO/IEC Guide 98:1995) |
(Guide to the expression of uncertainty in measurement) |
|
Ключевые слова: вибрация, неопорные элементы конструкций, механические свойства, испытания, динамическая жесткость, измерения |