МЕЖГОСУДАРСТВЕННЫЙ СОВЕТ ПО СТАНДАРТИЗАЦИИ, МЕТРОЛОГИИ И СЕРТИФИКАЦИИ
(МГС)
INTERSTATE COUNCIL FOR STANDARDIZATION, METROLOGY AND CERTIFICATION
(ISC)
|
МЕЖГОСУДАРСТВЕННЫЙ |
ГОСТ
ИСО |
Вибрация
ВОЗДЕЙСТВИЕ ВИБРАЦИИ НА ЧЕЛОВЕКА
Средства измерений
ISO 8041:2005
Human response to vibration - Measuring instrumentation
IDT
|
|
Москва Стандартинформ 2008 |
Предисловие
Цели, основные принципы и основной порядок проведения работ по межгосударственной стандартизации установлены ГОСТ 1.0-92 «Межгосударственная система стандартизации. Основные положения» и ГОСТ 1.2-97 «Межгосударственная система стандартизации. Стандарты межгосударственные, правила и рекомендации по межгосударственной стандартизации. Порядок разработки, принятия, применения, обновления и отмены»
Сведения о стандарте
1 ПОДГОТОВЛЕН Открытым акционерным обществом «Научно-исследовательский центр контроля и диагностики технических систем» на основе собственного аутентичного перевода международного стандарта, указанного в пункте 4
2 ВНЕСЕН Федеральным агентством по техническому регулированию и метрологии
3 ПРИНЯТ Межгосударственным советом по стандартизации, метрологии и сертификации (протокол № 29 от 24 июня 2006 г.)
За принятие проголосовали:
|
Краткое наименование страны |
Код страны |
Сокращенное наименование
национального органа |
|
Азербайджан |
AZ |
Азстандарт |
|
Беларусь |
BY |
Госстандарт Республики Беларусь |
|
Казахстан |
KZ |
Госстандарт Республики Казахстан |
|
Кыргызстан |
KG |
Кыргызстандарт |
|
Молдова |
MD |
Молдова-Стандарт |
|
Российская Федерация |
RU |
Федеральное агентство по техническому регулированию и метрологии |
|
Таджикистан |
TJ |
Таджикстандарт |
|
Узбекистан |
UZ |
Узстандарт |
|
Украина |
UA |
Госпотребстандарт Украины |
(Поправка).
4 Настоящий стандарт идентичен международному стандарту ИСО 8041:2005 «Воздействие вибрации на человека. Средства измерений» (ISO 8041:2005 «Human response to vibration - Measuring instrumentation»).
При применении настоящего стандарта рекомендуется использовать вместо ссылочных международных стандартов соответствующие им межгосударственные стандарты, сведения о которых приведены в дополнительном приложении J.
Степень соответствия - идентичная (IDT)
5 Приказом Федерального агентства по техническому регулированию и метрологии от 21 декабря 2007 г. № 387-ст межгосударственный стандарт ГОСТ ИСО 8041-2006 введен в действие в качестве национального стандарта Российской Федерации с 1 июля 2008 г.
6 ВЗАМЕН ГОСТ 12.4.012-83
СОДЕРЖАНИЕ
ГОСТ ИСО 8041-2006
МЕЖГОСУДАРСТВЕННЫЙ СТАНДАРТ
Вибрация
ВОЗДЕЙСТВИЕ ВИБРАЦИИ НА ЧЕЛОВЕКА
Средства измерений
Vibration. Human response to vibration. Measuring instrumentation
Дата введения - 2008-07-01
1 Область применения
Настоящий стандарт устанавливает требования к характеристикам средств измерений параметров ускорения, используемых при оценке воздействия вибрации на человека, а также к методам подтверждения этих характеристик в процессе испытаний: для целей утверждения типа, первичной и повторной поверок и проверки работоспособности на месте (в условиях применения средства измерений).
Настоящий стандарт распространяется на все виды исполнения средства измерений: в виде отдельного блока, совокупности устройств или компьютеризованной системы сбора и анализа данных.
Настоящий стандарт распространяется на средства измерений, используемые при оценке:
- локальной вибрации;
- общей вибрации;
- общей низкочастотной вибрации в диапазоне частот от 0,1 до 0,5 Гц.
В зависимости от назначения средство измерений должно реализовывать по крайней мере одну функцию частотной коррекции сигнала вибрации.
Настоящий стандарт устанавливает три уровня испытаний:
- испытания для целей утверждения типа: полные испытания средства измерений в соответствии с требованиями настоящего стандарта;
- поверка: испытания, проводимые с определенной периодичностью, с целью подтвердить, что характеристики испытуемого средства измерений находятся в установленных пределах;
- проверка работоспособности на месте: испытания минимального объема, достаточные для утверждения с большой долей вероятности, что характеристики испытуемого средства измерений остаются в установленных пределах.
2 Нормативные ссылки
В настоящем стандарте использованы нормативные ссылки на следующие стандарты и другие нормативные документы:
ИСО 2041:1990 Вибрация и удар. Термины и определения
ИСО 2631-1:1997 Вибрация. Измерение общей вибрации и оценка ее воздействия на человека. Часть 1. Общие требования
ИСО 2631-2:2003 Вибрация. Измерение общей вибрации и оценка ее воздействия на человека. Часть 2. Вибрация в зданиях в диапазоне частот от 1 до 80 Гц
ИСО 2631-4:2001 Вибрация. Измерение общей вибрации и оценка ее воздействия на человека. Часть 4. Руководство по оценке воздействия вибрации и угловых колебаний на условия комфорта пассажиров и бригады рельсовых транспортных средств
ИСО 5347 (все части) Методы калибровки датчиков вибрации и удара
ИСО 5348:1998 Вибрация и удар. Механическое крепление акселерометров
ИСО 5349-1:2001 Вибрация. Измерение локальной вибрации и оценка ее воздействия на человека. Часть 1. Общие требования
ИСО 16063 (все части) Методы калибровки датчиков вибрации и удара
МЭК 61000-4-2:2001 Электромагнитная совместимость. Часть 4-2. Испытания и методы измерений. Испытания на устойчивость к электростатическим разрядам
МЭК 61000-4-3:2002 Электромагнитная совместимость. Часть 4-3. Испытания и методы измерений. Испытания на устойчивость к излучению электромагнитных полей в области радиочастот
МЭК 61000-4-6:2004 Электромагнитная совместимость. Часть 4-6. Испытания и методы измерений. Испытания на устойчивость к кондуктивным помехам, наведенным электромагнитными полями в области радиочастот
МЭК 61000-6-2:2005 Электромагнитная совместимость. Часть 6-2. Основополагающие стандарты. Устойчивость к электромагнитным помехам в промышленных зонах
CISPR 22:2003 Оборудование в области информационных технологий. Характеристики радиопомех. Предельные значения и методы измерения
GUM. Руководство по выражению неопределенности измерений, 1993
Примечание - При пользовании настоящим стандартом целесообразно проверить действие ссылочных документов на территории государства по соответствующему указателю стандартов, составленному по состоянию на 1 января текущего года, и по соответствующим информационным указателям, опубликованным в текущем году. Если ссылочный документ заменен (изменен), то при пользовании настоящим стандартом следует руководствоваться заменяющим (измененным) документом. Если ссылочный документ отменен без замены, то положение, в котором дана ссылка на него, применяется в части, не затрагивающей эту ссылку.
3 Термины, определения и обозначения
3.1 Термины и определения
В настоящем стандарте применены термины по GUM и ИСО 2041, а также следующие термины с соответствующими определениями.
3.1.1 ускорение (вибрации): Составляющая ускорения вдоль измерительной оси, определенной соответствующим стандартом на методы оценки общей или локальной вибрации.
3.1.2 полосовой фильтр функции частотной коррекции: Составляющая функции частотной коррекции, представляющая собой передаточную функцию полосового фильтра.
3.1.3 диапазон полосовой фильтрации: Диапазон частот, определенный полосовым фильтром функции частотной коррекции.
3.1.4 номинальный диапазон частот: Диапазон частот, определенный в соответствующем руководстве (нормативном документе) и используемый для анализа (оценки) вибрации.
3.1.5 параметры корректированного ускорения
3.1.5.1 среднеквадратичное значение корректированного ускорения aw: Усредненная по времени поступательная или угловая вибрация, определяемая формулой
 (1)
(1)
где aw(x) - текущее значение корректированного ускорения (поступательного или углового) как функция времени;
Т - период измерений.
3.1.5.2 уровень корректированного ускорения Lw: Уровень среднеквадратичного значения корректированного ускорения, дБ, определяемый формулой
![]() (2)
(2)
где aw - величина, определенная в 3.1.5.1, м/с2;
а0 - опорное значение ускорения, равное 10-6 м/с2 (см. [1]).
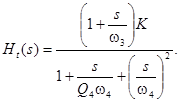
3.1.5.3 текущее среднеквадратичное значение корректированного ускорения aw,q(t): Среднеквадратичное значение корректированного ускорения в момент времени t, определяемое формулой
 (3)
(3)
где aw(x) - текущее значение корректированного ускорения в момент времени;
q - период интегрирования;
t - текущее время.
Примечание - В качестве аппроксимации линейного усреднения может быть использовано экспоненциальное усреднение, определяемое формулой
![]() (4)
(4)
где t - постоянная времени экспоненциального усреднения.
3.1.5.4 максимальное кратковременное среднеквадратичное значение (корректированного ускорения) MTVV: Максимальное значение текущего среднеквадратичного значения корректированного ускорения для периода интегрирования q, равного 1 с.
3.1.5.5 доза укачивания MSDV: Величина, представляющая собой интеграл квадрата корректированного ускорения aw(t), выражаемая в м/с1,5 и определяемая формулой
![]() (5)
(5)
где Ф - общий период времени, в течение которого наблюдают низкочастотные колебания, вызывающие укачивание (болезнь движения).
Примечания
1 Доза укачивания может быть получена из среднеквадратичного значения корректированного ускорения умножением на коэффициент Ф1/2.
2 Если не определено иначе, время воздействия Ф принимают равным периоду измерений Т.
3.1.5.6 доза вибрации VDV: Величина, представляющая собой интеграл четвертой степени корректированного ускорения aw(t), выражаемая в м/с1,75 и определяемая формулой
 (6)
(6)
где Ф - общее время воздействия вибрации1).
1) В ГОСТ 12.1.012-90 и ряде других нормативных документов доза вибрации была обозначена символом D и имела другое определение. Следует избегать путаницы между величинами D (которую теперь для оценки воздействия вибрации не применяют) и VDV.
Примечания
1 Доза вибрации более чувствительна к пиковым значениям ускорения, чем среднеквадратичное значение.
2 Если не определено иначе, время воздействия Ф принимают равным периоду измерений Т.
3.1.5.7 полная вибрация av: Суммарная вибрация по трем осям поступательного движения, определяемая формулой
![]() (7)
(7)
где awx, awy и awz - среднеквадратичные значения корректированного ускорения в направлении трех ортогональных измерительных осей х, у и z соответственно;
kх, ky, kz - поправочные множители (коэффициенты), значения которых зависят от целей измерения.
3.1.5.8 пиковое значение: Максимальное значение модуля корректированного ускорения на периоде измерения2).
2) Не следует путать пиковое значение с максимальным среднеквадратичным значением.
3.1.5.9 пик-фактор: Отношение пикового значения к среднеквадратичному значению корректированного ускорения (при использовании для обеих величин одной и той же функции частотной коррекции).
3.1.6 линейный рабочий диапазон: Интервал амплитуд внутри каждого диапазона измерений, в пределах которого отклонения от линейной функции не превышают допустимые значения, установленные настоящим стандартом.
3.1.7 перегрузка: Ситуация, когда входной сигнал вибрации превышает верхнюю границу линейного рабочего диапазона.
3.1.8 нечувствительность (по входу): Ситуация, когда входной сигнал вибрации не превышает нижнюю границу линейного рабочего диапазона.
3.1.9 опорный диапазон: Диапазон измерений, установленный в целях определения значений характеристик средств измерений.
Примечание - Данный диапазон применяют для измерений с использованием опорного сигнала вибрации.
3.1.10 опорный сигнал вибрации: Синусоидальный сигнал с заданной амплитудой и частотой, используемый для определения электромеханических характеристик средства измерений.
Примечание - В зависимости от назначения средства измерений задают различные опорные сигналы вибрации.
3.1.11 опорная частота: Частота, на которой определяют коэффициент преобразования измерительной цепи средства измерений.
3.1.12 тональная посылка: Один или несколько полных циклов синусоидального сигнала, начальное и конечное значения которого равны нулю.
3.1.13 сигнальная посылка: Один или несколько полных циклов периодического сигнала (например, пилообразных импульсов), начальное и конечное значения которого равны нулю.
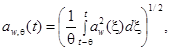
3.1.14 средство измерений (вибрации): Совокупность датчика вибрации, средств преобразования и показывающего устройства (рисунок 1), выполненная в виде единого блока или нескольких блоков, которая позволяет измерять параметры вибрации, воздействующей на человека.
3.1.15 техническая документация (на средство измерений): Руководство пользователя, инструкция по применению и другие документы, поставляемые пользователю средства измерений.
1 - датчик вибрации; 2 - система крепления; 3 -
вибрирующая поверхность; 4 - кабель; 5 - электрический вход;
6 - согласование сигнала; 7 - полосовая фильтрация; 8 -
частотная коррекция (включая полосовую фильтрацию);
9 - отфильтрованный сигнал; 10 - корректированный сигнал; 11
- временное взвешивание сигнала;
12 - дополнительное преобразование; 13 - показывающее устройство
а) Функциональная схема для преобразования сигнала во временной области
Рисунок 1 - Функциональная схема средства измерений вибрации, лист 1
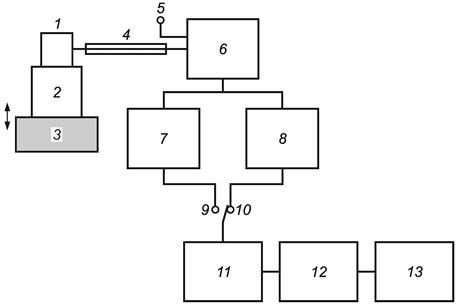
1 - датчик вибрации; 2 - система крепления; 3 -
вибрирующая поверхность; 4 - кабель; 5 - электрический вход; 6
- согласование сигнала;
7 - частотный анализ; взвешивание и усреднение по времени; 8 -
полосовая фильтрация (вычисление по спектру);
9 - частотная коррекция (вычисление по спектру); 10 - данные
после полосовой фильтрации; 11 - данные после частотной коррекции;
12 - суммирование по полосам частот; 13 - показывающее устройство
b) Функциональная схема для преобразования сигнала в частотной области
Рисунок 1, лист 2
3.2 Обозначения
В настоящем стандарте применены следующие обозначения:
aw - среднеквадратичное значение (с.к.з.) корректированного ускорения;
aw(t), aw(x) - текущее значение поступательного или углового корректированного ускорения в момент времени t или x;
t, x - текущее время;
Wx - функция частотной коррекции х;
ki - поправочный множитель, применяемый для оценки общей вибрации вдоль оси i;
H(s) - передаточная функция;
s - переменная преобразования Лапласа;
Т - период измерений;
Ф - время воздействия вибрации;
t - постоянная времени экспоненциального усреднения (интегрирования);
q - период интегрирования (линейного);
MTVV - максимальное кратковременное среднеквадратичное значение;
MSDV - доза укачивания;
VDV - доза вибрации;
Dj - фазовая погрешность;
f - частота;
п - номер третьоктавной полосы частот.
4 Нормальные условия окружающей среды
Для определения рабочих характеристик средства измерений установлены следующие нормальные условия окружающей среды:
- температура воздуха: 23 °С;
- относительная влажность: 50 %.
5 Требования к характеристикам средства измерений
Требования к рабочим характеристикам, установленные в настоящем разделе, справедливы для нормальных условий окружающей среды.
Средство измерений вибрации, воздействующей на человека (далее - средство измерений), должно иметь в своем составе устройства для показаний следующих параметров:
- среднеквадратичного значения корректированного ускорения для данного периода измерений;
- среднеквадратичного значения ускорения в диапазоне полосовой фильтрации для данного периода измерений;
- периода измерений.
Средство измерений должно иметь в своем составе устройство индикации появления перегрузки в любой из моментов измерений.
Средство измерений должно обеспечивать установку и регулировку коэффициента преобразования измерительной цепи.
Средства измерений в зависимости от их назначения могут включать в себя полный набор или часть функций, рассматриваемых в настоящем стандарте. Для всех функций, реализуемых средством измерений, соответствующие им характеристики должны удовлетворять требованиям настоящего стандарта.
Если средство измерений имеет более одного диапазона измерений, эти диапазоны и методы их переключения должны быть указаны в технической документации. В технической документации должно быть также указано, какой из диапазонов является опорным.
Параметры опорного сигнала вибрации приведены в таблице 1.
Таблица 1 - Параметры опорного сигнала вибрации
|
Функция частотной коррекции |
Номер таблицы в приложении |
Номинальный диапазон частот, Гц |
Параметры опорного сигнала вибрации |
Значение функции частотной коррекции на опорной частоте |
С.к.з. корректированного ускорения на опорной частоте, м/с2 |
||
|
частота, рад/с (Гц) |
с.к.з., м/с2 |
||||||
|
Локальная вибрация |
Wh |
8 - 1000 |
500 (79,58) |
10 |
0,2020 |
2,020 |
|
|
Общая вибрация |
Wb |
0,5 - 80 |
100 (15,915) |
1,0 |
0,8126 |
0,8126 |
|
|
Wc |
0,5145 |
0,5145 |
|||||
|
Wd |
0,1261 |
0,1261 |
|||||
|
We |
0,06287 |
0,06287 |
|||||
|
Wj |
1,019 |
1,019 |
|||||
|
Wk |
0,7718 |
0,7718 |
|||||
|
Wm |
1 - 80 |
0,3362 |
0,3362 |
||||
|
Общая низкочастотная вибрация |
Wf |
0,1 - 0,5 |
2,5 (0,3979) |
0,1 |
0,3888 |
0,03888 |
|
Для определения максимального кратковременного среднеквадратичного значения и пикового значения должна быть предусмотрена возможность работы средства измерений в режиме удержания измеренных значений. В технической документации должны быть описаны работа в режиме удержания и метод сброса показаний.
Настоящий стандарт предполагает возможность подачи на вход измерительного блока вместо сигнала с датчика вибрации заменяющий его эквивалентный электрический сигнал в целях определения и подтверждения характеристик средства измерений. Технической документацией должен быть установлен способ формирования эквивалентного электрического сигнала, позволяющий проводить испытания без датчика вибрации. В технической документации могут быть также описаны иные методы испытаний средств измерений в заданных режимах работы.
Примечание - Для проведения испытаний электрических характеристик измерительной цепи производителем может быть предусмотрен имитатор датчика вибрации с заданным электрическим импедансом или эквивалентный входной адаптер (электрический или неэлектрический).
В технической документации должны быть определены максимально допустимые пиковое значение и размах сигнала, поступающего сдатчика вибрации (в единицах заряда или напряжения), который может быть подан на электрический вход измерительного блока без его повреждения.
Допуски, установленные настоящим стандартом, определены для расширенной неопределенности измерений с коэффициентом охвата 2, что соответствует доверительной вероятности приблизительно 95 % (см. GUM).
5.2 Показания средства измерений
5.2.1 Общие положения
Для средства измерений, способного показывать более одного измеренного параметра вибрации, должен быть предусмотрен способ идентификации показаний (предпочтительно с помощью стандартных сокращений или буквенных символов).
В технической документации должны быть указаны показываемые параметры с описанием способа показаний.
При показании параметров суммарного воздействия вибрации по разным осям (например, полной вибрации) должна быть предусмотрена индикация используемых коэффициентов для каждой измерительной оси.
Если результаты измерений могут быть выведены на цифровой выход измерительного блока, в технической документации должен быть описан метод передачи (записи) оцифрованных данных на внешние показывающие устройства (средства хранения). В технической документации должны быть также указаны необходимые программные и аппаратные средства передачи данных.
Примечание - Рекомендуется использовать стандартизованные шины передачи данных.
Любое дополнительное устройство для показаний параметров сигнала, определенное в технической документации и предназначенное для подтверждения соответствия требованиям настоящего стандарта, следует рассматривать как составную часть средства измерений. Каждое такое устройство требует подтверждения его рабочих характеристик в соответствии с настоящим разделом и разделом 7 на устойчивость к внешним воздействующим факторам. Примерами дополнительных устройств могут служить устройства записи и компьютеры с мониторами.
Для средств измерений, у которых диапазон показаний меньше линейного рабочего диапазона, установленного в 5.7, в технической документации должен быть указан способ проверки отклонения от линейности в областях за пределами диапазона показаний.
5.2.2 Разрешение и частота обновления показаний
Показывающие устройства, указанные в технической документации, должны обеспечивать считывание данных с разрешением 1 % измеренного значения и выше.
Если средство измерений имеет аналоговое показывающее устройство (или устройство с имитацией аналогового процесса), которое обеспечивает непрерывное показание измеренного параметра, шкала устройства должна быть выполнена в логарифмическом масштабе. Диапазон шкалы аналогового показывающего устройства должен содержать не менее двух декад, ширина каждой декады не менее 10 мм.
Для цифровых показывающих устройств показания должны обновляться через определенные периоды времени. Период обновления должен быть согласован с измеряемой величиной. Диапазон выводимых значений должен, по крайней мере, охватывать линейный рабочий диапазон средства измерений.
Для средств измерений с цифровым показывающим устройством после обновления должно быть показано значение величины, выбранной на данный момент пользователем. Технической документацией могут быть установлены другие режимы показаний результатов измерений после обновления. В этом случае работа в каждом из таких режимов должна быть подробно объяснена. В технической документации должно быть указано, какой из режимов удовлетворяет требованиям настоящего стандарта, а какой не удовлетворяет.
5.2.3 Время стабилизации, начало измерений и продолжительность показаний
Период стабилизации работы средства измерений в нормальных условиях окружающей среды не должен превышать 2 мин. На показывающем устройстве должна быть предусмотрена индикация готовности средства измерений к проведению измерений.
Время между сигналом к началу измерений, поданным пользователем, и собственно началом измерений не должно превышать 0,5 с.
Примечание - Чтобы средство измерений было готово к приему данных после завершения предыдущего измерения, может потребоваться, особенно при измерении общей низкочастотной вибрации, наличие некоторой рабочей фазы перед началом новых измерений.
Пока результаты измерений не выведены на показывающее устройство, устройство индикации должно ясно указывать рабочее состояние средства измерений - находится ли оно в режиме измерений или в стадии инициализации.
5.3 Аналоговый выход
При наличии аналогового выхода по току технической документацией должны быть установлены характеристики выходной цепи средства измерений, в том числе:
- максимальный размах выходного напряжения (не менее 1 В);
- внутренний электрический импеданс выходной цепи (не менее 100 Ом);
- минимально допустимый импеданс нагрузки;
- частотные коррекции, использованные для получения выходного сигнала.
Подсоединение к выходной цепи, не содержащей источника электрического тока, включая цепь короткого замыкания, не должно приводить к изменению результатов измерений более чем на 2 %.
5.4 Коэффициент преобразования измерительной цепи
В технической документации должна быть указана по крайней мере одна модель калибратора, позволяющего проверять и поддерживать в заданных пределах значение коэффициента преобразования измерительной цепи. Требования к калибратору - в соответствии с приложением А.
В технической документации должна быть описана процедура регулировки показаний средства измерений при использовании калибратора, обеспечивающая выполнение требований настоящего стандарта. Эту регулировку применяют ко всем датчикам, рекомендованным для использования в составе данного средства измерений, а также ко всем кабелям и другим вспомогательным устройствам, предусмотренным изготовителем для соединения с датчиком вибрации.
5.5 Погрешность показаний измеренного параметра вибрации на опорной частоте в нормальных условиях измерений
Значения допусков для показаний средством измерений соответствующих значений после подачи на вход опорного сигнала (синусоидальной вибрации, приложенной в основании датчика вибрации или устройства его крепления) указаны в таблице 2. Эти допуски применяют к показаниям в опорном диапазоне после калибровки по 5.4 по завершении времени стабилизации и для всех функций частотной коррекции.
Таблица 2 - Допуски для показаний по измерениям вибрации на опорной частоте
|
Значение допуска, % |
|
|
Допуск для показаний параметра вибрации на опорной частоте в нормальных условиях окружающей среды |
± 4 для локальной и общей вибрации |
|
± 5 для низкочастотной общей вибрации |
|
|
Разность между показанным значением любого измеренного параметра корректированного ускорения и показанным значением результата измерений для того же ускорения после прохождения полосового фильтра и умножения на соответствующее значение функции частотной коррекции (для опорного сигнала вибрации на опорной частоте) |
± 3 |
|
Разность между показанным значением текущего среднеквадратичного значения ускорения и показанным значением ускорения, линейно усредненного по формуле (1) в пределах произвольного периода измерений, после прохождения полосового фильтра (для опорного сигнала вибрации на опорной частоте) |
± 2 |
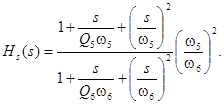
5.6 Функции частотной коррекции и частотные характеристики соответствующих фильтров
5.6.1 Параметры
Средство измерений должно реализовывать частотную коррекцию сигнала вибрации в соответствии с одной или несколькими функциями частотной коррекции, указанными в таблице 1, а также соответствующую полосовую фильтрацию сигнала. Функции частотной коррекции определены формулами (8) - (12), а также параметрами, приведенными в таблице 3.
Таблица 3 - Параметры функций частотной коррекции и соответствующих фильтров
|
Полосовой фильтр |
Переходный фильтр |
Ступенчатый фильтр |
Коэффициент усиления К |
|||||||||
|
f1, Гц |
Q1 |
f2, Гц |
Q2 |
f3, Гц |
f4, Гц |
Q4 |
f5, Гц |
Q5 |
f6, Гц |
Q6 |
||
|
Wb |
0,4 |
1/√2 |
100 |
1/√2 |
16 |
16 |
0,55 |
2,5 |
0,9 |
4 |
0,95 |
1,024 |
|
Wc |
0,4 |
1/√2 |
100 |
1/√2 |
8 |
8 |
0,63 |
¥ |
1 |
¥ |
1 |
1 |
|
Wd |
0,4 |
1/√2 |
100 |
1/√2 |
2 |
2 |
0,63 |
¥ |
1 |
¥ |
1 |
1 |
|
We |
0,4 |
1/√2 |
100 |
1/√2 |
1 |
1 |
0,63 |
¥ |
1 |
¥ |
1 |
1 |
|
Wf |
0,08 |
1/√2 |
0,63 |
1/√2 |
¥ |
0,25 |
0,86 |
0,0625 |
0,80 |
0,10 |
0,80 |
1 |
|
Wh |
108/10 |
1/√2 |
1031/10 |
1/√2 |
100 2p |
100 2p |
0,64 |
¥ |
1 |
¥ |
1 |
1 |
|
Wj |
0,4 |
1/√2 |
100 |
1/√2 |
¥ |
¥ |
1 |
3,75 |
0,91 |
5,32 |
0,91 |
1 |
|
Wk |
0,4 |
1/√2 |
100 |
1/√2 |
12,5 |
12,5 |
0,63 |
2,37 |
0,91 |
3,35 |
0,91 |
1 |
|
Wm |
10-0,1 |
1/√2 |
100 |
1/√2 |
|
|
0,5 |
¥ |
1 |
¥ |
1 |
1 |
|
Примечания 1 В ИСО 2631-4, таблица А.1, значение параметра Q1 дано с округлением до двух значащих цифр. В настоящей таблице приведено точное значение этого параметра. 2 В ИСО 5349-1, таблица А.1, значения параметров f1, f2, f3, f4 даны с округлением до пяти значащих цифр, а параметра Q1 - до двух значащих цифр. В настоящей таблице приведены точные значения этих параметров. |
||||||||||||
Передаточные функции фильтров, составляющих функцию частотной коррекции, определены применительно к сигналу ускорения через значения угловых частот w1, ... , w6 (wi = 2pfi, где fi - частоты, определенные в таблице 3, i = 1, ..., 6) и добротности Q1, Q2, Q4, Q5 и Q6 [см. формулы (8) - (12)]. Функция частотной коррекции представляет собой произведение передаточных функций трех фильтров: полосового, переходного и ступенчатого.
5.6.2 Полосовой фильтр
Передаточная функция полосового фильтра является произведением передаточных функций фильтров Баттерворта второго порядка нижних и верхних частот:
Фильтр верхних частот:
 (8)
(8)
Фильтр нижних частот:
 (9)
(9)
Передаточная функция полосового фильтра представляет собой произведение Hh(s)×Нl(s).
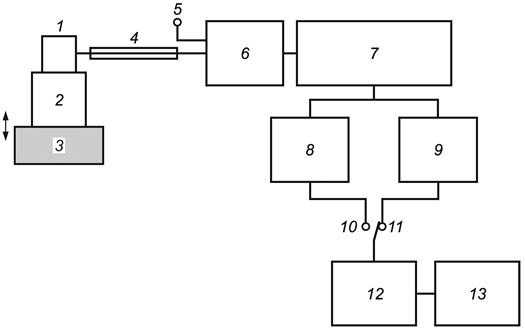
5.6.3 Переходный фильтр
Передаточная функция переходного фильтра представляет собой постоянный коэффициент умножения для сигнала ускорения на низких частотах и постоянный коэффициент умножения для сигнала скорости на высоких частотах:
 (10)
(10)
Примечание - Ht(s) = 1, когда обе частоты f3 и f4 (или, соответственно, w3 и w4) равны бесконечности.
5.6.4 Ступенчатый фильтр
Передаточная функция ступенчатого фильтра имеет участок в форме ступеньки, на котором значение передаточной функции растет со скоростью приблизительно 6 дБ на октаву и представляет собой постоянный коэффициент умножения для сигнала, пропорционального первой производной от ускорения:
 (11)
(11)
Примечание - Hs(s) = 1, когда обе частоты f5 и f6 (или, соответственно, w5 и w6) равны бесконечности.
5.6.5 Функция частотной коррекции
Каждая функция частотной коррекции представляет собой произведение передаточных функций полосового, переходного и ступенчатого фильтров:
H(s) = Hh(s)×Hl(s)×Ht(s)×Hs(s). (12)
Данная формула определяет представление функции частотной коррекции в частотной области через изменение с мнимой угловой частотой s = j×2pf ее модуля и фазы.
Примечания
1 В некоторых публикациях вместо буквы s используют букву р.
2 Величину s можно интерпретировать также как независимую переменную в преобразовании Лапласа.
Таблицы и рисунки приложения В показывают изменение модуля весовой функции в зависимости от частоты f в соответствии с формулами (8) - (12) и значениями параметров из таблицы 3.
Если средство измерений обеспечивает измерения с использованием одной или нескольких функций частотной коррекции, не рассматриваемых в настоящем стандарте, то эти функции вместе с допусками на их значения должны быть определены в технической документации. Если дополнительная функция частотной коррекции установлена каким-либо стандартом, то ее реализация средством измерений должна соответствовать требованиям этого стандарта.
Фильтры, определенные значениями таблицы 3 и формулами (8) - (12), могут быть реализованы сочетанием простых аналоговых фильтров. Пример реализации частотной характеристики цифровыми методами в частотной и временной областях преобразования сигнала приведен в приложении С.
5.6.6 Допуски
Допуски на значения функции частотной коррекции приведены в таблицах 4 и 5. В таблице 5 указаны пределы, в которых должны находиться значения функции частотной коррекции, во всех диапазонах измерений. Эти допуски установлены с учетом максимально допустимой расширенной неопределенности измерений.
Таблица 4 - Частоты перехода для определения допусков функций частотной коррекции
|
Частота перехода, Гц |
||||
|
ft1 |
ft2 |
ft3 |
ft4 |
|
|
Wb |
10-3/10 |
101/10 |
1018/10 |
1022/10 |
|
Wc |
10-3/10 |
101/10 |
1018/10 |
1022/10 |
|
Wd |
10-3/10 |
101/10 |
1018/10 |
1022/10 |
|
We |
10-3/10 |
101/10 |
1018/10 |
1022/10 |
|
Wf |
10-13/10 |
10-9/10 |
10-3/10 |
101/10 |
|
Wj |
10-3/10 |
101/10 |
1018/10 |
1022/10 |
|
Wh |
107,5/10 |
1010/10 |
1029/10 |
1031,5/10 |
|
Wk |
10-3/10 |
101/10 |
1018/10 |
1022/10 |
|
Wm |
10-3/10 |
101/10 |
1018/10 |
1022/10 |
Таблица 5 - Допуски на значения функции частотной коррекции
|
Допуск на абсолютное значение функции частотной коррекции |
Допуск на характеристическую фазовую девиацию1) Dj0 |
|
|
f < ft1 |
+26 %, -100 % |
± ¥ |
|
ft1 £ f £ ft2 |
+26 %, -21 % |
± 12° |
|
ft2 < f < ft3 |
+12 %, -11 % |
± 6° |
|
ft3 £ f £ ft4 |
+26 %, -21 % |
± 12° |
|
ft4 < f |
+26 %, -100 % |
± ¥ |
|
1) Допуск на характеристическую фазовую девиацию применяют только к средствам измерений параметров, чувствительных к фазовым характеристикам средства измерений. |
||
При измерениях параметров вибрации, чувствительных к фазовым характеристикам (пиковое значение, максимальное кратковременное среднеквадратичное значение, доза вибрации), критичной является фазовая характеристика измерительной цепи, определенная формулами (8) - (12). При этом погрешность измерений, связанная с отклонениями фазовой характеристики, зависит не от абсолютных значений отклонений, а от того, как быстро изменяется погрешность фазовой характеристики с частотой. По этой причине для оценки точности задания фазовой характеристики используют параметр характеристической фазовой девиации Dj0, определяемый по формуле
 (13)
(13)
где fn - среднегеометрическая частота n-й третьоктавной полосы частот;
Djn - фазовая погрешность на частоте fn.
5.7 Линейность по амплитуде
Во всем диапазоне измерений амплитуды показанное значение должно быть пропорционально вибрации, воспринимаемой датчиком. Это справедливо для любой частоты, во всех диапазонах измерений, для любой функции частотной коррекции. Требование линейности относится ко всей измерительной цепи, включая датчик вибрации, и ко всем измеряемым параметрам.
Во всех диапазонах средства измерений отклонения от линейности не должны превышать 6 %. В опорном диапазоне и на опорной частоте линейный рабочий диапазон должен составлять по крайней мере 60 дБ.
Примечание - Для средства измерений локальной вибрации, включающей в себя импульсы большой мощности, требование к диапазону линейности может быть ужесточено.
В технической документации должен быть определен диапазон вибрации, в пределах которого отклонения от линейности не превышают 6 % без индикации перегрузки (нечувствительности по входу), для стационарного синусоидального сигнала на любой частоте в пределах номинального диапазона частот.
В случае нескольких диапазонов измерений, переключаемых вручную, перекрытие между соседними диапазонами должно составлять не менее 40 дБ.
В технической документации должны быть указаны верхняя и нижняя границы линейного рабочего диапазона для каждого диапазона измерений.
5.8 Собственный шум измерительной цепи
В технической документации должны быть определены типичные среднеквадратичные значения корректированного ускорения, показываемые средством измерений в случае, когда датчик вибрации установлен на невибрирующем объекте. Эти показания в нормальных условиях окружающей среды должны соответствовать общему внутреннему шуму измерительной цепи, включающей в себя датчик вибрации и элементы измерительного блока.
5.9 Показания при измерении параметров сигнальной посылки
Требования к измерениям переходных процессов определены для входного сигнала в виде прямоугольных импульсов с заполнением пилообразным сигналом на опорной частоте.
Тестовый сигнал в форме последовательности импульсов с заполнением пилообразным сигналом показан на рисунке 2. Характеристики тестового сигнала показаны в таблице 6. В таблицах 7 - 9 представлены относительные показания средства измерений в ответ на тестовый сигнал с амплитудой 1 м/с2. Эти значения следует умножать на реальное значение амплитуды тестового сигнала.
Примечания
1 Значения измеряемых параметров получены численным моделированием.
2 Пилообразная форма сигнала выбрана для задания точного соотношения между фазами частотных составляющих в разложении тестового сигнала. Это позволяет в процессе испытаний с использованием тестового сигнала данного вида контролировать фазовую характеристику функции частотной коррекции.

1 - амплитуда; 2 - начальный интервал; 3 - период повторения импульсов; 4 - общая длительность тестового сигнала
Рисунок 2 - Сигнальная посылка
Таблица 6 - Параметры тестового сигнала в форме последовательности импульсов с заполнением пилообразным сигналом (сигнальной посылки)
|
Функция частотной коррекции |
Частота, рад/с (Гц) |
Начальный интервал, с |
Число периодов заполнения в одном импульсе |
Период повторения импульсов, с |
Общая длительность сигнала, с |
|
|
Локальная вибрация |
Wh |
500 (79,58) |
0,2 |
1, 2, 4, 8 и 16 |
2 |
12 |
|
Общая вибрация |
Wb, Wa Wd, We, Wj, Wk, Wm |
100 (15,915) |
1 |
10 |
60 |
|
|
Общая низкочастотная вибрация |
Wf |
2,5 (0,3979) |
40 |
400 |
2400 |
Таблица 7 - Требования к показаниям средства измерений, настроенного на измерения локальной вибрации
|
Число периодов заполнения в одном импульсе |
С.к.з. |
Допуск, % |
|
|
Полосовой фильтр |
1 |
0,0448 |
10 |
|
2 |
0,0633 |
10 |
|
|
4 |
0,0895 |
10 |
|
|
8 |
0,127 |
10 |
|
|
16 |
0,179 |
10 |
|
|
Непрерывный сигнал |
0,565 |
10 |
|
|
Wh |
1 |
0,0103 |
10 |
|
2 |
0,0133 |
10 |
|
|
4 |
0,0168 |
10 |
|
|
8 |
0,0224 |
10 |
|
|
16 |
0,0309 |
10 |
|
|
Непрерывный сигнал |
0,0946 |
10 |
Таблица 8 - Требования к показаниям средства измерений, настроенного на измерения общей вибрации
|
Число периодов заполнения в одном импульсе |
С.к.з. |
Допуск, % |
VDV |
Допуск, % |
MTVV, линейное усреднение |
Допуск, % |
MTVV, экспоненциальное усреднение |
Допуск, % |
|
|
Полосовой фильтр |
1 |
0,0433 |
10 |
0,498 |
12 |
0,137 |
10 |
0,135 |
10 |
|
2 |
0,0612 |
10 |
0,593 |
12 |
0,193 |
10 |
0,188 |
10 |
|
|
4 |
0,0865 |
10 |
0,705 |
12 |
0,274 |
10 |
0,258 |
10 |
|
|
8 |
0,122 |
10 |
0,838 |
12 |
0,387 |
10 |
0,344 |
10 |
|
|
16 |
0,173 |
10 |
0,996 |
12 |
0,547 |
10 |
0,437 |
10 |
|
|
Непрерывный сигнал |
0,546 |
10 |
1,77 |
12 |
0,547 |
10 |
0,549 |
10 |
|
|
Wb |
1 |
0,0314 |
10 |
0,342 |
12 |
0,0991 |
10 |
0,0968 |
10 |
|
2 |
0,0435 |
10 |
0,403 |
12 |
0,137 |
10 |
0,132 |
10 |
|
|
4 |
0,0614 |
10 |
0,482 |
12 |
0,194 |
10 |
0,182 |
10 |
|
|
8 |
0,0867 |
10 |
0,575 |
12 |
0,274 |
10 |
0,243 |
10 |
|
|
16 |
0,123 |
10 |
0,685 |
12 |
0,387 |
10 |
0,309 |
10 |
|
|
Непрерывный сигнал |
0,387 |
10 |
1,22 |
12 |
0,388 |
10 |
0,388 |
10 |
|
|
Wc |
1 |
0,0222 |
10 |
0,244 |
12 |
0,0703 |
10 |
0,0684 |
10 |
|
2 |
0,0292 |
10 |
0,275 |
12 |
0,0923 |
10 |
0,0885 |
10 |
|
|
4 |
0,0397 |
10 |
0,318 |
12 |
0,126 |
10 |
0,117 |
10 |
|
|
8 |
0,0550 |
10 |
0,374 |
12 |
0,174 |
10 |
0,153 |
10 |
|
|
16 |
0,0770 |
10 |
0,445 |
12 |
0,243 |
10 |
0,192 |
10 |
|
|
Непрерывный сигнал |
0,240 |
10 |
0,788 |
12 |
0,243 |
10 |
0,242 |
10 |
|
|
Wd |
1 |
0,00669 |
10 |
0,0779 |
12 |
0,0212 |
10 |
0,0197 |
10 |
|
2 |
0,00906 |
10 |
0,0852 |
12 |
0,0286 |
10 |
0,0264 |
10 |
|
|
4 |
0,0116 |
10 |
0,0923 |
12 |
0,0366 |
10 |
0,0330 |
10 |
|
|
8 |
0,0148 |
10 |
0,101 |
12 |
0,0469 |
10 |
0,0400 |
10 |
|
|
16 |
0,0197 |
10 |
0,115 |
12 |
0,0611 |
10 |
0,0481 |
10 |
|
|
Непрерывный сигнал |
0,0590 |
10 |
0,197 |
12 |
0,0611 |
10 |
0,0594 |
10 |
|
|
We |
1 |
0,00342 |
10 |
0,0409 |
12 |
0,0108 |
10 |
0,00992 |
10 |
|
2 |
0,00478 |
10 |
0,0452 |
12 |
0,0151 |
10 |
0,0135 |
10 |
|
|
4 |
0,00637 |
10 |
0,0493 |
12 |
0,0201 |
10 |
0,0176 |
10 |
|
|
8 |
0,00816 |
10 |
0,0535 |
12 |
0,0255 |
10 |
0,0214 |
10 |
|
|
16 |
0,0102 |
10 |
0,0592 |
12 |
0,0311 |
10 |
0,0244 |
10 |
|
|
Непрерывный сигнал |
0,0295 |
10 |
0,0987 |
12 |
0,0311 |
10 |
0,0297 |
10 |
|
|
Wj |
1 |
0,0435 |
10 |
0,517 |
12 |
0,138 |
10 |
0,135 |
10 |
|
2 |
0,0616 |
10 |
0,609 |
12 |
0,195 |
10 |
0,189 |
10 |
|
|
4 |
0,0874 |
10 |
0,723 |
12 |
0,277 |
10 |
0,261 |
10 |
|
|
8 |
0,124 |
10 |
0,859 |
12 |
0,392 |
10 |
0,349 |
10 |
|
|
16 |
0,175 |
10 |
1,02 |
12 |
0,554 |
10 |
0,443 |
10 |
|
|
Непрерывный сигнал |
0,554 |
10 |
1,81 |
12 |
0,555 |
10 |
0,557 |
10 |
|
|
Wk |
1 |
0,0299 |
10 |
0,323 |
12 |
0,0944 |
10 |
0,0922 |
10 |
|
2 |
0,0411 |
10 |
0,380 |
12 |
0,130 |
10 |
0,125 |
10 |
|
|
4 |
0,0577 |
10 |
0,455 |
12 |
0,182 |
10 |
0,171 |
10 |
|
|
8 |
0,0814 |
10 |
0,543 |
12 |
0,257 |
10 |
0,228 |
10 |
|
|
16 |
0,115 |
10 |
0,648 |
12 |
0,363 |
10 |
0,289 |
10 |
|
|
Непрерывный сигнал |
0,362 |
10 |
1,15 |
12 |
0,364 |
10 |
0,363 |
10 |
|
|
Wm |
1 |
0,0149 |
10 |
0,165 |
12 |
0,0472 |
10 |
0,0456 |
10 |
|
2 |
0,0197 |
10 |
0,185 |
12 |
0,0263 |
10 |
0,0594 |
10 |
|
|
4 |
0,0264 |
10 |
0,211 |
12 |
0,0836 |
10 |
0,0775 |
10 |
|
|
8 |
0,0363 |
10 |
0,247 |
12 |
0,0115 |
10 |
0,101 |
10 |
|
|
16 |
0,0507 |
10 |
0,294 |
12 |
0,160 |
10 |
0,126 |
10 |
|
|
Непрерывный сигнал |
0,158 |
10 |
0,520 |
12 |
0,160 |
10 |
0,159 |
10 |
Таблица 9 - Требования к показаниям средства измерений, настроенного на измерения общей низкочастотной вибрации
|
Число периодов заполнения в одном импульсе |
С.к.з. |
Допуск, % |
MSDV |
Допуск, % |
|
|
Полосовой фильтр |
1 |
0,0341 |
10 |
1,671 |
10 |
|
2 |
0,0487 |
10 |
2,386 |
10 |
|
|
4 |
0,0690 |
10 |
3,380 |
10 |
|
|
8 |
0,0982 |
10 |
4,811 |
10 |
|
|
16 |
0,139 |
10 |
6,810 |
10 |
|
|
Непрерывный сигнал |
0,439 |
10 |
21,51 |
10 |
|
|
Wf |
1 |
0,0197 |
10 |
0,9651 |
10 |
|
2 |
0,0236 |
10 |
1,156 |
10 |
|
|
4 |
0,0304 |
10 |
1,489 |
10 |
|
|
8 |
0,0416 |
10 |
2,038 |
10 |
|
|
16 |
0,0571 |
10 |
2,797 |
10 |
|
|
Непрерывный сигнал |
0,176 |
10 |
8,662 |
10 |
5.10 Индикация перегрузки по входу
Средства измерений должны предусматривать возможность обнаружения перегрузки вдоль всей измерительной цепи, включая датчик вибрации. Индикатор перегрузки должен быть на каждом показывающем устройстве средства измерений. Специальные меры должны быть предусмотрены для предотвращения перегрузки датчика вибрации (например, выбором датчика в соответствии с целями измерений, наличием встроенного в датчик детектора перегрузки, использованием механического фильтра).
Индикация перегрузки должна появляться сразу по превышении параметрами сигнала установленных границ до того, как будут превышены пределы допусков на линейность стационарного сигнала и на результаты измерений для сигнальной посылки. Данное требование должно выполняться во всем номинальном диапазоне частот.
Индикатор перегрузки должен реагировать как на положительные, так и на отрицательные сигналы. Разность между модулями положительного и отрицательного входных сигналов, вызывающих индикацию перегрузки, не должна превышать 15 %.
При измерении параметров, требующих интегрирования на фиксированном временном интервале, а также других параметров, вычисляемых в процессе измерения и показываемых по его завершении, индикация перегрузки должна сохраняться до тех пор, пока не произойдет сброс результатов измерений.
При измерении текущего среднеквадратичного значения корректированного ускорения индикатор перегрузки должен оставаться включенным в момент действия перегрузки, а также все то время, когда наблюдавшаяся перегрузка может оказать влияние на результат измерений (т.е. в течение периода интегрирования сигнала для линейного усреднения и в течение периода времени, равного удвоенной постоянной времени, для экспоненциального усреднения). Индикация перегрузки должна сохраняться в течение 1 с при измерении локальной вибрации и в течение 8 с при измерении общей и общей низкочастотной вибрации.
В технической документации должны быть описаны работа индикатора перегрузки, методы интерпретации сигнала перегрузки, а также способы сброса индикации перегрузки.
5.11 Индикация нечувствительности по входу
Если уровень усредненной по времени вибрации опускается ниже нижней границы линейного рабочего диапазона, индикация нечувствительности должна появиться до того, как будут превышены пределы допусков на линейность. Индикация нечувствительности должна сохраняться, пока сохраняется состояние нечувствительности или пока это состояние способно оказать влияние на результат измерений. Минимальное время индикации нечувствительности составляет 1 с для локальной вибрации и 8 с для общей и общей низкочастотной вибрации.
5.12 Период интегрирования
Средство измерений должно предусматривать возможность установки пользователем периода интегрирования для измерения параметров корректированного ускорения. Конструкция средства измерений может допускать выбор пользователем произвольного периода интегрирования в заданном диапазоне или выбор периода интегрирования из заданных значений.
5.13 Измерение текущего среднеквадратичного значения корректированного ускорения
Для средства измерений, предусматривающего возможность измерения текущего среднеквадратичного значения корректированного ускорения, значение периода интегрирования или постоянной времени при экспоненциальном усреднении следует проверять по показаниям в ответ на стационарный синусоидальный сигнал опорной частоты, подаваемый на электрический вход измерительного блока. Время подачи сигнала должно составлять не менее пяти периодов интегрирования для линейного усреднения и не менее 20 постоянных времени интегрирования для экспоненциального усреднения. Дополнительные сведения о линейном и экспоненциальном методах усреднения приведены в приложении D.
После отключения входного сигнала показания средства измерений должны изменяться как указано в таблице 10 для линейного усреднения и в таблице 11 для экспоненциального усреднения. Время спада определяют как временной интервал между моментом отключения сигнала и моментом, когда показания средства измерений будут составлять 10 % первоначального значения. Проверку выполнения требований, установленных в таблицах 10 и 11, осуществляют в опорном диапазоне измерений.
Таблица 10 - Изменение показаний при линейном усреднении
|
Время спада, с |
|
|
0,125 |
0,124 ± 0,005 |
|
1 |
0,99 ± 0,05 |
|
8 |
7,92 ± 0,2 |
Таблица 11 - Изменение показаний при экспоненциальном усреднении
|
Время спада, с |
Эквивалентная скорость затухания, дБ/с |
|
|
0,125 |
0,58 ± 0,03 |
31 - 40 |
|
1 |
4,61 ± 0,25 |
3,8 - 4,9 |
|
8 |
36,8 ± 2 |
0,48 - 0,62 |
5.14 Обновление показаний
При измерениях среднеквадратичного значения корректированного ускорения, максимального кратковременного среднеквадратичного значения или дозы вибрации с использованием любой доступной функции частотной коррекции должен быть предусмотрен способ очистки устройства хранения результатов измерений и приведения его в состояние готовности для повторных измерений. В технической документации должно быть указано, происходит ли одновременно со сбросом показаний измерений отключение индикации перегрузки по входу. Кроме того, в технической документации должна быть приведена процедура сброса данных и установлена номинальная временная задержка между сбросом данных и готовностью к началу новых измерений.
Процедура сброса данных не должна вносить помехи в работу показывающих устройств.
5.15 Устройство измерения времени
Средство измерений может иметь устройство измерения времени, прошедшего с начала процесса интегрирования сигнала вибрации. Кроме того, может быть предусмотрена возможность предварительной установки периода интегрирования (с шагом 1 с).
Допуск на измеренное значение времени, прошедшего с начала интегрирования, составляет 0,1 %. Разрешение показаний должно быть не менее 1 с.
В технической документации должны быть указаны минимальный и максимальный периоды интегрирования для сигналов любого уровня в пределах диапазона показывающего устройства.
5.16 Взаимное влияние измерительных каналов
Если на вход измерительного блока подают сигналы по нескольким каналам, изменения значения, измеренного по одному каналу, в результате влияния другого канала должно быть менее 0,5 %.
5.17 Характеристики датчика вибрации
Характеристики датчика вибрации выбирают в соответствии с целями измерений, как указано в приложении Е.
5.18 Питание
В случае применения автономного источника питания должно быть указано, что его применение позволяет удовлетворить требованиям настоящего стандарта. Проверка электропитания не должна вносить возмущений в процесс измерений.
Изменение напряжения питания средства измерений от номинального значения до минимального уровня, установленного в технической документации, в процессе измерения параметров опорного сигнала не должно приводить к изменению результатов измерений более чем на 3,0 %.
Если питание осуществляют от собственных батарей, в технической документации должны быть указаны рекомендуемый тип батарей и установлено время ожидаемой непрерывной работы от полностью заправленного автономного источника питания для нормальных условий окружающей среды.
Если средство измерений с автономным источником питания предназначено для измерений вибрации в течение периода времени, превышающего номинальный срок работы батареи, в технической документации должен быть описан рекомендуемый способ работы от внешнего источника питания, включая требования к диапазону напряжения питания и его пульсациям (в том числе, высокочастотным выбросам).
6 Крепление датчика вибрации
При необходимости использования специальных механических фильтров, систем крепления и кабелей в технической документации должно быть указано, что средство измерений удовлетворяет требованиям настоящего стандарта только при установке этих специальных устройств.
Метод крепления должен удовлетворять общим требованиям ИСО 5348. Кроме того, система крепления может быть испытана в соответствии с руководством согласно приложению F.
В технической документации должно быть указано, для каких измерений какие устройства крепления могут быть использованы, а также перечислены случаи и обстоятельства, когда использование той или иной системы крепления с большой вероятностью приведет к повышению неопределенности измерений.
7 Воздействие окружающей среды и создаваемые электромагнитные поля
7.1 Общие положения
Все требования к чувствительности коэффициента преобразования измерительной цепи к воздействию внешних факторов рассматривают относительно коэффициента преобразования на опорной частоте в нормальных условиях окружающей среды. Технической документацией должно быть установлено время стабилизации работы средства измерений после изменений условий окружающей среды.
Средство измерений, собранное из отдельных элементов, может иметь ограничения на применение в отношении воздействия внешних факторов. Такие ограничения должны быть указаны в технической документации.
Примечание - Под средством измерений, собранным из отдельных элементов, понимают систему, элементы которой - сигнальный процессор, средства анализа (записи) и показывающие устройства - были испытаны согласно соответствующим стандартам или техническим условиям изготовителя.
7.2 Температура окружающего воздуха
Влияние изменений температуры окружающего воздуха на коэффициент преобразования задают в диапазоне температур от минус 10 °С до плюс 50 °С. Чувствительность к изменению температуры воздуха не должна превышать ± 4 % во всем заданном диапазоне температур.
Требование по чувствительности к изменению температуры воздуха применяют либо для всего средства измерений в целом, либо для тех его составных частей, которые на практике могут подвергаться воздействию большего разброса температур.
Для элементов средства измерений, которые в соответствии с технической документацией предназначены для работы в условиях с контролируемым температурным режимом (например, внутри помещений), диапазон температур может быть ограничен интервалом от плюс 5 °С до плюс 30 °С. Ограничение на диапазон температур не применяют ко всему средству измерений в целом.
В пределах заданного диапазона температур окружающего воздуха отклонения от линейности на опорной частоте и протяженность линейного рабочего диапазона в пределах опорного диапазона измерений должны оставаться в пределах допусков, указанных в 5.7.
7.3 Температура поверхности
Влияние изменения температуры вибрирующей поверхности на коэффициент преобразования задают в диапазоне температур от минус 10 °С до плюс 50 °С. Чувствительность к изменению температуры поверхности не должна превышать ± 4 % во всем заданном диапазоне температур.
Требование по чувствительности к изменениям температуры вибрирующей поверхности относится к акселерометру, кабелям и системам крепления, которые могут находиться в непосредственном контакте с поверхностью.
В пределах всего заданного диапазона температур поверхности отклонения от линейности на опорной частоте и протяженность линейного рабочего диапазона в пределах опорного диапазона измерений должны оставаться в пределах допусков, указанных в 5.7.
7.4 Электростатическое напряжение
Влияние электростатических разрядов на работу средства измерений или его элементов должно быть сведено до минимума.
Средство измерений должно сохранять работоспособность после контактного разряда на него электростатического напряжения до ± 4 кВ или воздушного разряда электростатического напряжения до ± 8 кВ. Полярность электростатического напряжения берут относительно земли.
Воздействие указанных электростатических разрядов не должно ухудшать характеристики средства измерений или нарушать его работоспособность, кроме случаев, оговоренных в технической документации. В технической документации может быть указано, что воздействие электростатических разрядов способно привести к снижению качества функционирования средства измерений или к невозможности выполнения им своих функций. Такое ухудшение функционирования не должно предполагать неработоспособность средства измерений, изменение его конфигурации, повреждение или потерю сохраненных данных или постоянную утрату части функций.
7.5 Излучение радиочастотного поля и помехи, вносимые в электрическую сеть
Излучение средства измерений в диапазоне радиочастот должно быть сведено до минимума.
Если конструкция средства измерений рассчитана на передачу данных по соединительному кабелю, в технической документации должны быть указаны рекомендуемая длина кабеля и устройства, к которому кабель может быть подключен.
Уровень радиочастотного поля, излучаемого средством измерений у порта вывода сигналов, не должен превышать 30 дБ (при опорном значении 1 мВ/м) в диапазоне частот от 30 до 230 МГц и 37 дБ в диапазоне частот от 230 МГц до 1 ГГц. В технической документации должны быть указаны режимы работы средства измерений и любого подсоединяемого устройства, при которых уровень излучения радиочастотных полей будет максимальным.
Возмущения (квазипиковые и средние значения), вносимые средством измерений у порта электропитания, не должны превышать указанных в таблице 12. Если при использовании устройства для измерения квазипиковых значений получают, что результаты измерений удовлетворяют требованиям для среднего значения, можно считать, что данное средство измерений удовлетворяет установленным предельным допускам как для квазипикового, так и для среднего сигнала.
7.6 Устойчивость к радиочастотному электромагнитному полю и помехам сетевой частоты
Влияние помех сетевой частоты и радиочастотных электромагнитных полей на работу средства измерений (или его элементов, указанных в технической документации) не должно изменять рабочее состояние или конфигурацию средства измерения, приводить к искажению или потере сохраненных данных. Настоящее требование распространяется на все режимы работы в нормальных условиях.
Таблица 12 - Пределы вносимых возмущений в напряжение питания электрической сети
|
Предельные значения возмущений напряжения, дБ (относительно опорного значения 1 мВ) |
||
|
Квазипиковое |
Среднее |
|
|
0,15 - 0,50 |
66 - 56 |
56 - 46 |
|
0,50 - 5 |
56 |
46 |
|
5 - 30 |
60 |
50 |
|
Примечания 1 В отношении характеристик измерителя квазипиковых возмущений - см. [2]. 2 Нижние границы уровней возмущений справедливы для частот перехода. 3 В диапазоне от 0,15 до 0,50 МГц уровень возмущений напряжения уменьшается прямо пропорционально логарифму частоты. |
||
В технической документации должны быть указаны режимы работы средства измерений и любых присоединенных устройств, при которых устойчивость к воздействию помех сетевой частоты и радиочастотных электромагнитных полей будет минимальна (т.е. чувствительность к воздействию - максимальна).
Устойчивость к помехам сетевой частоты полей определяют при воздействии однородного магнитного поля, среднеквадратичное значение напряженности которого равно 80 А/м, на частотах 50 и 60 Гц. Условие однородности магнитного поля проверяют до внесения в него средства измерений. В технической документации должна быть указана ориентация средства измерений в магнитном поле, при которой его чувствительность к воздействию данного поля будет максимальна.
Устойчивость к радиочастотному электромагнитному полю определяют в диапазоне несущей частоты от 26 МГц до 1 ГГц при ее амплитудной модуляции глубиной 80 % синусоидальным сигналом на частоте (частотах), соответствующей условиям применения средства измерений. Среднеквадратичное значение электрической напряженности однородного (без внесенного средства измерений) немодулированного поля должно составлять 10 В/м.
Примечание - В технической документации может быть указано, что проверка соответствия средства измерений требованиям настоящего стандарта проведена для электромагнитного поля, среднеквадратичное значение электрической напряженности которого превышало 10 В/м.
При воздействии помех сетевой частоты и радиочастотных электромагнитных полей изменение измеренного и показываемого значения параметра вибрации не должно превышать ± 10 %.
Устойчивость средств измерений с входными и выходными портами электропитания переменного тока к влиянию кондуктивных помех определяют в диапазоне частот от 0,15 до 80 МГц.
Устойчивость средств измерений с портами ввода-вывода сигналов, к которым соединительными кабелями длиной более 3 м присоединены другие элементы измерительной системы, к влиянию кондуктивных помех определяют в диапазоне частот от 0,15 до 80 МГц.
7.7 Защита от воды и пыли
Средство измерений должно быть защищено от воздействия воды и пыли. Изготовитель должен указывать код IP средства измерений. Указанный код IP должен соответствовать назначению средства измерений, например, при его использовании для оценки воздействия вибрации на человека в заводских условиях может быть необходима защита по IP65, в то время как для лабораторных условий достаточно соблюдения требований по IP42.
Примечание - Коды IP для защиты средства измерений оболочками установлены в [3].
8 Использование вспомогательных устройств
При использовании дополнительных кабелей, поставляемых изготовителем для соединения измерительного блока с акселерометром, а также для соединения между собой других элементов средства измерений, в технической документации должны быть описаны все поправки, которые необходимо вносить в результаты измерений.
Техническая документация должна содержать сведения о влиянии дополнительных приспособлений, поставляемых изготовителем средства измерений. Эти сведения должны быть приведены в отношении всех характеристик, изменяющихся после установки приспособлений. В число дополнительных приспособлений входят устройство крепления акселерометра и механические фильтры. Техническая документация должна содержать информацию о влиянии приспособлений на коэффициент преобразования измерительной цепи и частотные характеристики.
В технической документации должно быть указано, будет ли средство измерений соответствовать требованиям настоящего стандарта после установки дополнительных приспособлений.
Если конструкцией предусмотрено использование внешних фильтров, в технической документации должны быть описаны все необходимые соединения и способ работы средства измерений с внешними фильтрами.
Техническая документация должна содержать детальное описание соединений вспомогательных устройств, а также влияние этих устройств на электрические характеристики средства измерений. В число вспомогательных устройств входят принтеры, компьютеры, устройства записи данных.
9 Маркировка
Средство измерений, удовлетворяющее всем требованиям настоящего стандарта, должно иметь маркировку с указанием обозначения настоящего стандарта. Маркировка должна включать в себя также наименование фирмы или торговую марку поставщика, несущего ответственность за соответствие средства измерений установленным техническим требованиям. Кроме того, в маркировке указывают модель средства измерений и его серийный номер.
Если средство измерений состоит из нескольких отдельных блоков, каждый функционально независимый блок должен быть помечен в соответствии с требованиями настоящего раздела. Должно быть четко указано, из каких отдельных функциональных блоков состоит средство измерений в целом.
10 Техническая документация
Средство измерений поставляют вместе с технической документацией на него.
Если средство измерений состоит из нескольких отдельных блоков, техническая документация должна распространяться на их сочетание, составляющее в целом функционально законченный прибор. В технической документации должны быть описаны все необходимые составляющие и их взаимное влияние друг на друга.
Значения величин, приводимых в технической документации, должны быть выражены в единицах Международной системы единиц СИ.
Информация, которую должна содержать техническая документация, приведена в приложении G.
11 Виды испытаний
В настоящем стандарте определены три уровня испытаний в целях подтверждения качества функционирования средства измерений:
a) Испытания для целей утверждения типа. Проводятся изготовителем. Включают в себя полный набор испытаний, проводимый на образцах средства измерений данной модели. Цель испытаний - продемонстрировать, что средство измерений удовлетворяет требованиям настоящего стандарта.
b) Поверка. Проводится аккредитованными организациями с целью:
- периодически (перед покупкой и затем с периодичностью раз в год или раз в два года) подтверждать, что характеристики средства измерений продолжают удовлетворять требованиям настоящего стандарта;
- продемонстрировать, что собираемое из отдельных элементов средство измерений удовлетворяет требованиям настоящего стандарта;
- продемонстрировать, что после внесения в средство измерений конструктивных изменений или после его ремонта оно продолжает удовлетворять требованиям настоящего стандарта.
c) Проверка работоспособности. Проводится пользователем. Включает в себя испытания минимального объема с целью подтвердить, что средство измерений с большой вероятностью функционирует в соответствии с установленными требованиями. Данные испытания проводят непосредственно до и сразу после использования средства измерений.
Испытания проводят для проверки выполнения требований, установленных в разделах 5 - 10 настоящего стандарта. В таблице 13 показаны объемы испытаний каждого вида и пункты настоящего стандарта, где они детализированы.
Таблица 13 - Перечень разделов (подразделов) настоящего стандарта, где установлены требования к характеристикам средства измерений и методы испытаний для их подтверждения
|
Испытания |
||||||
|
Раздел, подраздел, приложение |
Характеристика |
Тестовый сигнал |
Подраздел, приложение |
|||
|
Электрический |
Механический |
Испытания для целей утверждения типа |
Поверка |
Проверка работоспособности |
||
|
Общие характеристики |
||||||
|
Показание измеренных параметров вибрации |
- |
|||||
|
Влияние аналогового выхода |
• |
- |
- |
|||
|
Коэффициент преобразования измерительной цепи |
• |
|||||
|
Правильность показаний при измерениях на опорной частоте |
• |
- |
||||
|
Функции частотной коррекции и частотные характеристики соответствующих фильтров |
• |
• |
- |
|||
|
Линейность по амплитуде |
• |
• |
- |
|||
|
Собственный шум измерительной цепи |
• |
- |
||||
|
Правильность показаний при измерении параметров сигнальной посылки |
• |
- |
||||
|
Индикация перегрузки по входу |
• |
• |
- |
|||
|
Индикация нечувствительности по входу |
• |
• |
- |
|||
|
Время интегрирования |
• |
- |
||||
|
Измерение текущего среднеквадратичного значения корректированного ускорения |
• |
- |
||||
|
Обновление показаний |
- |
|||||
|
Устройства измерения времени |
- |
- |
||||
|
Взаимное влияние измерительных каналов |
• |
- |
||||
|
Правильность измерений полной вибрации |
• |
- |
- |
|||
|
Характеристики датчика вибрации |
• |
-1) |
- |
|||
|
Питание |
- |
- |
||||
|
Крепление датчика вибрации |
Приложение F |
- |
- |
|||
|
Влияние окружающей среды и создаваемые электромагнитные поля |
- |
- |
||||
|
Влияние вспомогательных устройств |
• |
- |
||||
|
Маркировка |
- |
|||||
|
Техническая документация |
- |
|||||
|
1) Хотя в целях настоящего стандарта подтверждению подлежит передаточная функция измерительной цепи в целом, рекомендуется во время поверок отдельно определять коэффициент преобразования датчика вибрации. Результаты измерений коэффициента преобразования используют при выявлении причин возможных несоответствий. |
||||||
12 Испытания для целей утверждения типа
12.1 Общие положения
В настоящем разделе рассмотрены различные аспекты испытаний, проводимых для демонстрации соответствия средства измерений всем требованиям настоящего стандарта.
Соответствие требованиям настоящего стандарта считают подтвержденным, если отклонение результата измерений от заданного значения (с учетом расширенной неопределенности измерений, обеспечиваемой испытательной лабораторией) лежит в пределах заданного допуска.
Неопределенность измерений определяют в соответствии с «Руководством по выражению неопределенности измерений». Расширенную неопределенность измерений рассчитывают в испытательной лаборатории, используя для этого значение коэффициента охвата не менее двух.
В настоящем разделе приведена максимальная расширенная неопределенность измерений, которая допустима при проверке соответствия требованиям настоящего стандарта. Испытания на подтверждение соответствия требованиям настоящего стандарта не могут быть проведены испытательными лабораториями, у которых расчетные значения расширенной неопределенности измерений превышают максимально допустимые значения.
Не допускается исключение какого-либо из испытаний, описанных в настоящем разделе, кроме тех, что относятся к функциям, не реализованным данным средством измерений.
Если не оговорено иное, все испытания, описанные в настоящем разделе, должны быть проведены для каждого канала многоканального средства измерений.
12.2 Требования испытаний
Все измерительные приборы, которые применяют в процессе испытаний на подтверждение заявленных характеристик и которые могут вносить вклад в неопределенность результатов измерений, должны быть аттестованы и поверены в соответствии с национальной метрологической схемой.
Частота входных сигналов должна быть в пределах ± 0,2 % требуемого значения.
Значения параметров вибрации должны быть в пределах ± 2 % требуемых значений.
Примечание - Методы, установленные стандартами серии ИСО 16063, не обеспечивают проведение калибровки датчиков вибрации в диапазоне частот ниже 0,4 Гц.
В процессе испытаний климатические факторы должны находиться в следующих пределах:
- температура окружающего воздуха: от 20 °С до 26 °С;
- относительная влажность воздуха: от 10 % до 75 % (без выпадения конденсата). Коэффициент гармоник d для синусоидальной вибрации на входе не должен превышать 5 %.
Коэффициент гармоник d для входного электрического сигнала не должен превышать 0,1 %.
Примечание - Коэффициент гармоник d, %, определяют по формуле
![]() (14)
(14)
где а1 - среднеквадратичное значение ускорения на частоте возбуждения;
atot - среднеквадратичное значение ускорения в полосе частот возбуждения.
12.3 Представление средства измерений на испытания
Средство измерений должно быть представлено на испытания вместе с технической документацией и всеми вспомогательными приспособлениями и устройствами, которые в технической документации указаны как его неотъемлемые элементы в конфигурации, предназначенной для нормального использования. Примерами таких устройств могут служить акселерометр, устройство крепления и кабель.
12.4 Проверка маркировки и технической документации
Необходимо убедиться, что маркировка средства измерений соответствует требованиям раздела 9.
Перед проведением испытаний необходимо убедиться, что техническая документация на средство измерений содержит все сведения, требуемые по разделу 10, в соответствии с назначением данного средства измерений. По завершении испытаний все положения технической документации должны быть заново пересмотрены, чтобы убедиться в их правильности и в том, что все заявленные параметры находятся в пределах допусков, установленных настоящим стандартом.
12.5 Проверка общих требований
Необходимо убедиться, что средство измерений соответствует требованиям 5.1.
Для средства измерений с несколькими диапазонами измерений необходимо убедиться, что перекрытие диапазонов соответствует требованиям 5.7.
Необходимо убедиться, что показывающие устройства средства измерений соответствуют требованиям 5.2.
Если технической документацией предписано использование батарей питания конкретной модели и типа, их следует установить до начала испытаний.
Если средство измерений не удовлетворяет требованиям, перечисленным в настоящем разделе, испытания на соответствие требованиям настоящего стандарта не проводят.
12.6 Подготовка средства измерений к испытаниям
Перед проведением любого испытания и выполнением операций, указанных в технической документации, необходимо проверить значение коэффициента преобразования средства измерений на опорной частоте для опорного сигнала вибрации. При необходимости коэффициент преобразования следует установить таким образом, чтобы средство измерений показывало истинное значение параметра вибрации в нормальных условиях окружающей среды.
12.7 Показания при измерениях на опорной частоте в нормальных условиях
Необходимо определить погрешность показаний ускорения для опорного сигнала на опорной частоте (см. таблицу 1) как разность между значением, показанным средством измерений, и тем, что получен в результате измерений в той же точке с помощью эталонного акселерометра.
Относительную погрешность измерения e параметра atest выражают в процентах измеренного с помощью эталонного акселерометра значения аref:
 (15)
(15)
Вначале амплитуду воспроизводимого опорного сигнала вибрации измеряют с помощью эталонного акселерометра, а затем проводят измерения, используя испытуемое средство измерений. Для этого средство измерений настраивают на измерения в опорном диапазоне, устанавливают режимы полосовой фильтрации и линейного интегрирования и проводят измерения в течение не менее чем 30 с для локальной вибрации, 1 мин для общей вибрации и 5 мин для общей низкочастотной вибрации. Сигнал на входе измерительной цепи (сумма полезного сигнала и фонового шума) должен превышать фоновый шум не менее чем в 10 раз.
Для определения погрешности измерения проводят не менее трех измерений. Интервал между измерениями должен превышать время стабилизации, указанное в технической документации, чтобы перед получением нового показания были достигнуты одинаковые условия измерений. Разность между минимальным и максимальным показаниями для серии из трех измерений не должна превышать 3 %.
Среднеарифметическое значение погрешности показаний измерений должно быть в пределах допусков, установленных в таблице 2. Максимальная расширенная неопределенность измерения - 2 %.
Для каждой функции частотной коррекции на устройство входа электрического сигнала (далее - входное устройство) подают стационарный синусоидальный сигнал на опорной частоте. Регулируют амплитуду входного электрического сигнала таким образом, чтобы средством измерений было показано заданное значение для включенного фильтра частотной коррекции. Далее тот же электрический сигнал пропускают через полосовой фильтр, соответствующий той же функции частотной коррекции, умножают измеренное значение на значение функции частотной коррекции на опорной частоте (см. таблицу 1) и сравнивают с результатом предыдущего измерения. Разность результатов измерений должна быть в пределах допуска, установленного в таблице 2. Максимальная расширенная неопределенность измерения - 2 %.
Для средств измерений, реализующих интегрирование по времени с использованием временного окна, на входное устройство подают стационарный синусоидальный электрический сигнал опорной частоты. Амплитуду входного сигнала регулируют таким образом, чтобы показания средства измерений с включенным полосовым фильтром функции частотной коррекции совпадали с заданным значением опорного сигнала в заданном опорном диапазоне. После этого для того же входного сигнала получают показания с использованием временного окна. Разность между двумя показаниями должна быть в пределах допуска, установленного в таблице 2. Максимальная расширенная неопределенность измерения - 2 %.
12.8 Взаимное влияние измерительных каналов
Для средства измерений, имеющего два и более измерительных канала (например, предназначенного для измерений трехкомпонентной вибрации), проводят испытания с целью определить помехи, создаваемые каналами друг другу.
Все каналы должны быть настроены на измерения в опорном диапазоне. На каждый канал по очереди подают электрический сигнал опорной частоты и с амплитудой опорного сигнала вибрации - в это время входы других каналов должны быть заглушены. Амплитуда тестового сигнала должна быть в пределах 5 дБ верхней границы диапазона измерений. В процессе испытания контролируют выход каждого из каналов.
В отношении выходного сигнала для каждого из каналов должны быть выполнены требования 5.16.
12.9 Характеристики датчика вибрации
Выполнение требований к акселерометру (приложение Е) проверяют соответствующим методом по ИСО 5347 и ИСО 16063.
12.10 Линейность по амплитуде и индикация нечувствительности по входу
12.10.1 Проверка линейности с использованием электрического сигнала
Испытания средства измерений на линейность по амплитуде проводят с использованием тестового стационарного синусоидального электрического сигнала на частотах, указанных в таблице 14. Линейность по амплитуде проверяют по измерениям параметра, требующего усреднения по времени, с установленным полосовым фильтром функции частотной коррекции.
Таблица 14 - Частоты и приращения амплитуды тестового сигнала для испытаний на линейность
|
Частоты тестового сигнала1), Гц |
Приращения амплитуды тестового сигнала, дБ |
||
|
В пределах 5 дБ от границ перегрузки и нечувствительности |
На других участках диапазонов измерений |
||
|
Локальная вибрация |
8; 80; 800 |
1 |
5 |
|
Общая вибрация |
1; 4; 16; 63 |
1 |
5 |
|
Общая низкочастотная вибрация |
0,2; 0,4 |
1 |
5 |
|
1) Указаны номинальные среднегеометрические частоты третьоктавных полос. При испытаниях следует использовать точные значения, например, вместо 8 Гц - 109/10 Гц » 7,943 Гц. |
|||
Испытания на линейность в каждом диапазоне, за исключением опорного, на каждой тестовой частоте начинают с подачи тестового сигнала, амплитуда которого равна амплитуде опорного сигнала в опорном диапазоне, умноженной на коэффициент ослабления для данного диапазона измерений по отношению к опорному диапазону.
Тестовый сигнал подают на электрический вход измерительного блока. Амплитуду сигнала регулируют таким образом, чтобы в опорном диапазоне показание средства измерений совпадало со значением амплитуды опорного сигнала.
В опорном диапазоне измерений амплитуду входного сигнала на опорной частоте повышают с шагом приращения, указанным в таблице 14, от нижней границы диапазона до того значения, при котором впервые появляется индикация перегрузки. После этого амплитуду входного сигнала понижают с шагом, указанным в таблице 14, от значения, когда впервые наблюдалась индикация перегрузки до заданной нижней границы. При этом регистрируют значения амплитуд входного сигнала и соответствующие им показания средства измерений.
Для каждой тестовой частоты и амплитуды сигнала - от нижней границы опорного диапазона до первого появления индикации перегрузки - отклонения от линейности по амплитуде должны быть в пределах допуска по 5.7. Протяженность линейного рабочего диапазона на опорной частоте в опорном диапазоне измерений должна удовлетворять требованиям к линейному рабочему диапазону по 5.7. Максимальная расширенная неопределенность измерения - 2 %.
После испытаний в опорном диапазоне измерений проверяют линейность по амплитуде во всех других диапазонах. Испытания проводят для частот и приращений амплитуды сигнала, заданных в таблице 14, от начальной амплитуды вниз до нижней границы и вверх до верхней границы каждого диапазона измерений.
В каждом диапазоне измерений отклонение от линейности по амплитуде должно быть в пределах допуска по 5.7 на протяжении всего линейного рабочего диапазона, заданного в технической документации, и до появления индикации перегрузки. Максимальная расширенная неопределенность измерения - 2 %.
Для средства измерений, осуществляющего интегрирование сигнала ускорения с использованием временного окна, у которого линейный рабочий диапазон превышает диапазон значений показывающего устройства, линейность по амплитуде может быть проверена с использованием тональной посылки, для которой амплитуда сигнала заполнения превышает верхнюю границу показываемых значений.
Для средств измерений, реализующих линейное усреднение по времени и имеющих рабочий диапазон, который превышает диапазон показываемых значений, линейность по амплитуде в диапазоне выше верхней границы показываемых значений может быть проверена с использованием прямоугольного импульса с заполнением, вырезанного из стационарного входного сигнала. Длительность импульса должна быть не менее 30 с для локальной вибрации и 5 мин для общей вибрации (для общей низкочастотной вибрации это испытание не проводят). Период интегрирования должен превышать длительность импульса.
Для каждого диапазона измерений и для каждой тестовой частоты в случае, когда показание средства измерений выше или равно заданной нижней границе диапазона измерений, индикация нечувствительности должна отсутствовать. Для каждого диапазона измерений и каждой тестовой частоты индикация нечувствительности должна появляться, как только уровень сигнала понижается на 1 дБ относительно нижней границы данного диапазона измерений.
12.10.2 Проверка линейности с использованием механического (вибрационного) сигнала
Испытания средства измерений на линейность по амплитуде проводят с возбуждением синусоидальной стационарной вибрации на частотах, указанных в таблице 14. Линейность по амплитуде проверяют по измерениям параметра, требующего усреднения по времени, с установленным полосовым фильтром функции частотной коррекции. Линейность оценивают, вычитая из показания средства измерений соответствующее значение параметра вибрации, измеренное с помощью эталонного акселерометра. Акселерометр, входящий в состав испытуемого средства измерений, и эталонный акселерометр устанавливают так, как предписано ИСО 16063-21.
Испытания на линейность в каждом диапазоне, за исключением опорного, на каждой тестовой частоте начинают с возбуждения сигнала вибрации, амплитуда которого равна амплитуде опорного сигнала вибрации в опорном диапазоне, умноженной на коэффициент ослабления для данного диапазона измерений по отношению к опорному диапазону.
Вибрацию возбуждают на опорной частоте у основания датчика вибрации. Амплитуду вибрации регулируют таким образом, чтобы показание средства измерений в опорном диапазоне совпадало со значением амплитуды опорного сигнала.
Проверку линейности с использованием сигнала вибрации осуществляют в диапазоне протяженностью не менее 40 дБ.
В опорном диапазоне измерений амплитуду вибрации на тестовой частоте повышают с шагом приращения, указанным в таблице 14, от нижней границы диапазона до наименьшего из следующих пределов:
- первого появления индикации перегрузки;
- достижения максимальной вибрации, воспринимаемой входным устройством;
- достижения верхней границы диапазона линейности эталонного датчика.
После этого амплитуду вибрации понижают с шагом, указанным в таблице 14, до наибольшего из следующих пределов:
- заданной нижней границы средства измерений;
- достижения минимальной вибрации, воспринимаемой входным устройством;
- достижения нижней границы диапазона линейности эталонного датчика.
В процессе испытаний регистрируют каждое значение, измеренное с помощью эталонного акселерометра, и соответствующее ему показание средства измерений. При определении амплитуды воспроизведенной вибрации учитывают характеристику линейности эталонного акселерометра.
Для каждой тестовой частоты и амплитуды сигнала - от нижней границы опорного диапазона до первого появления индикации перегрузки - отклонения от линейности по амплитуде должны быть в пределах допуска по 5.7. Протяженность линейного рабочего диапазона на опорной частоте в опорном диапазоне измерений должна удовлетворять требованиям к линейному рабочему диапазону по 5.7. Максимальная расширенная неопределенность измерения - 3 %.
После испытаний в опорном диапазоне измерений проверяют линейность по амплитуде во всех других диапазонах. Испытания проводят для частот и приращений амплитуды вибрации, заданных в таблице 14, от начальной точки вниз до нижней границы и вверх до верхней границы каждого диапазона измерений.
В каждом диапазоне измерений отклонение от линейности по амплитуде должно быть в пределах допуска по 5.7 на протяжении всего линейного рабочего диапазона, заданного технической документацией, и до появления индикации перегрузки. Максимальная расширенная неопределенность измерения - 4 %.
12.11 Функции частотной коррекции и частотные характеристики соответствующих фильтров1)
12.11.1 Общие положения
1) В данном подразделе исправлены ошибки оригинала (ИСО 8041:2005).
Описанные в настоящем пункте методы оценки функции частотной коррекции и частотных характеристик фильтров предполагают отсутствие у средства измерений электрического выхода. При наличии электрического выхода и возможности его использования при испытании сначала проверяют соответствие между показаниями параметра корректированного ускорения и напряжениями на электрическом выходе. Данные, полученные в ходе испытаний по проверке частотных характеристик, не следует пытаться интерпретировать в целях оценки нелинейности.
Выбирают по одной функции частотной коррекции для каждого возможного применения средства измерений (оценка локальной, общей или общей низкочастотной вибрации), для которых испытания проводят с использованием как электрического, так и механического тестовых сигналов. Для остальных функций частотной коррекции испытания проводят с использованием только одного тестового сигнала - электрического или механического.
По возможности испытания проводят в опорном диапазоне измерений. При наличии сомнений в том, что требования к частотным характеристикам одинаково соблюдены для разных диапазонов измерений, проводят дополнительные испытания в других диапазонах. Все измерения выполняют в той области измерительного диапазона, где отклонения от линейности находятся в пределах допуска по 5.7.
Испытания частотных характеристик проводят с шагом приращения частоты не более чем в треть октавы в диапазонах частот, указанных в таблице 15.
Таблица 15 - Частоты электрического и механического тестовых сигналов
|
Диапазон тестовых частот1, Гц |
||
|
Электрический тестовый сигнал |
Механический тестовый сигнал |
|
|
Локальная |
4 - 2000 |
8 - 2000 |
|
Общая |
0,25 - 160 |
0,5 - 160 |
|
Общая низкочастотная |
0,05 - 1 |
0,4; 0,5 |
|
1) Указаны номинальные среднегеометрические частоты третьоктавных полос. При испытаниях следует использовать точные значения, например вместо 8 Гц - 109/10 Гц » 7,943 Гц. |
||
12.11.2 Испытания с использованием механического тестового сигнала
Для оценки погрешности реализации частотной характеристики средства измерений проводят измерения ускорения (без частотной коррекции) с помощью эталонного акселерометра. Погрешность частотной характеристики определяют как разность между показанием средства измерений и произведением полученного с помощью эталонного акселерометра среднеквадратичного значения ускорения на значение функции частотной коррекции для данной частоты тестового сигнала. Акселерометр, входящий в состав испытуемого средства измерений, и эталонный акселерометр устанавливают так, как предписано ИСО 16063-21.
На опорной частоте регулируют амплитуду вибрации таким образом, чтобы измеренное средством измерений значение ускорения (после прохождения полосового фильтра) на 20 дБ превышало нижнюю границу заданного диапазона линейности. Заданную таким образом амплитуду тестового сигнала аin используют как базовое значение входного сигнала в последующих испытаниях.
Для каждой тестовой частоты с помощью эталонного акселерометра регулируют амплитуду тестового сигнала таким образом, чтобы она была равна аin. Для каждой тестовой частоты, определенной в соответствии с таблицей 15, регистрируют воспроизводимый входной сигнал и соответствующее показание средства измерений ajnd.
Относительную погрешность реализации e(f) частотной характеристики на частоте f определяют по формуле
где w(f) - значение функции частотной коррекции на частоте f.
При определении амплитуды воспроизведенной на разных тестовых частотах вибрации учитывают частотную характеристику эталонного акселерометра.
Если входное ускорение аin невозможно поддерживать постоянным во всем диапазоне частот, в измеренное средством измерений значение нужно внести соответствующую поправку, определяемую разностью результатов измерений, выполненных с помощью эталонного акселерометра, на тестовой и опорной частотах.
Максимальная расширенная неопределенность измерений - 4,5 % на всех частотах номинального диапазона частот средства измерений.
Примечание - Если передаточные функции датчика вибрации и электрической цепи средства измерений определяют по отдельности, тогда относительное отклонение e(f) номинальной функции частотной коррекции от заданной на частоте f определяют по формуле
e(f) = et(f) + ee(f), (17)
где et(f) - относительное отклонение частотной характеристики датчика вибрации на частоте f;
ee(f) - относительное отклонение частотной характеристики электрической цепи на частоте f.
Для каждого из слагаемых в правой части уравнения (17) учитывают помимо измеренного значения (eт,t и eт,е соответственно) также относительную расширенную неопределенность (ит,t и ит,е соответственно):
![]()
![]() (18)
(18)
В приложении F приведена информация об испытании системы крепления акселерометра.
12.11.3 Испытания с использованием электрического тестового сигнала
Синусоидальный электрический сигнал подают на электрический вход измерительного блока.
На опорной частоте регулируют амплитуду тестового сигнала таким образом, чтобы измеренное средством измерений значение (после прохождения сигналом полосового фильтра) на 20 дБ превышало нижнюю границу заданного диапазона линейности. Заданную таким образом амплитуду тестового сигнала ajnd используют как базовое значение в последующих испытаниях.
Для каждой тестовой частоты среднеквадратичное значение тестового сигнала vin регулируют таким образом, чтобы после прохождения сигналом соответствующего фильтра частотной коррекции на показывающем устройстве средства измерений появилось заданное базовое значение ajnd. Для каждой тестовой частоты, определенной в соответствии с таблицей 15, регистрируют значение амплитуды входного сигнала и соответствующее показание средства измерений ajnd.
Относительную погрешность частотной характеристики электрической цепи ee(f) на частоте f определяют по формуле
![]() (19)
(19)
где w(f) - значение функции частотной коррекции на частоте f;
s - коэффициент преобразования, определяемый формулой
![]() (20)
(20)
На любой тестовой частоте сумма среднеквадратичных значений входного сигнала и собственного шума должна по крайней мере в 10 раз превышать среднеквадратичное значение фонового шума.
Если невозможно поддерживать одно и то же показание ajnd во всем диапазоне частот, в измеренное средством измерений значение нужно внести соответствующую поправку, определяемую разностью входного электрического сигнала на тестовой и опорной частотах. Кроме того, при использовании на разных тестовых частотах разных амплитуд тестового сигнала в измеренный средством измерений сигнал следует внести соответствующую поправку на нелинейность.
Максимальная расширенная неопределенность измерений для всех тестовых частот - 3 %.
12.11.4 Проверка соответствия требованиям для других функций частотной коррекции
Для тех функций частотной коррекции, где в процессе испытаний был использован механический тестовый сигнал, относительную погрешность частотной характеристики определяют непосредственно по результатам испытаний как e(f) [см. формулу (16)]. Если во время испытаний был использован только электрический тестовый сигнал, тогда для получения общей относительной погрешности частотной характеристики необходимо принимать во внимание относительную погрешность частотной характеристики датчика вибрации e(f). Эту величину определяют, вычитая ee(f) из e(f) в тех испытаниях, где были использованы как электрический, так и механический тестовые сигналы.
Пример - Средство измерений позволяет проводить измерения с использованием двух функций частотной коррекции: Wd и Wk. Для Wd испытания проводят с использованием электрического и механического тестовых сигналов, относительную погрешность частотной характеристики датчика вибрации определяют как разность между погрешностями, полученными с использованием механического и электрического тестовых сигналов. Эту погрешность добавляют к погрешности, полученной при использовании электрического тестового сигнала для частотной характеристики Wk, чтобы найти общую относительную погрешность для данной частотной характеристики средства измерений.
Для всех реализуемых средством измерений функций частотной коррекции погрешность частотной характеристики должна быть в пределах допуска по 5.6. Максимальная расширенная неопределенность для всех тестовых частот - 5 %.
Если средство измерений позволяет проводить измерение с использованием дополнительных функций частотной коррекции, погрешность их реализации определяют с учетом их назначения и допусков, установленных технической документацией.
12.12 Собственный шум измерительной цепи
Собственный шум измерительной цепи определяют по усреднению результатов десяти измерений вибрации с использованием датчика, установленного на невибрирующем объекте. В процессе испытаний проводят измерения как среднеквадратичного значения корректированного ускорения, так и текущего среднеквадратичного значения корректированного ускорения. При измерении среднеквадратичного значения ускорения период интегрирования выбирают равным 1 мин в режиме измерения локальной вибрации, 5 мин - в режиме измерения общей вибрации и 30 мин - в режиме измерения общей низкочастотной вибрации.
12.13 Показания в ответ на сигнальную посылку
Средство измерений устанавливают в режим измерения сигнала после полосовой фильтрации в опорном диапазоне измерений, подают на вход стационарный синусоидальный электрический сигнал на частоте, определенной в таблице 6, после чего амплитуду сигнала регулируют таким образом, чтобы показание средства измерений соответствовало 50 % верхней границы линейного рабочего диапазона. После этого для всех применяемых временных окон и функций частотной коррекции используют последовательности импульсов, определенные в таблице 6.
Область спада для пилообразного импульса не должна превышать 1/(5f2), где f2 - верхняя граница диапазона полосовой фильтрации для данной функции частотной коррекции, определенная в таблице 3.
Чтобы исключить влияние не результат испытаний высокочастотных переходных процессов, которые имеют место при отключении тестового сигнала, между генератором сигнала и испытуемым средством измерений можно установить однополюсный низкочастотный фильтр. Частота среза фильтра должна быть достаточно высока, чтобы исключить его влияние на результаты испытаний, например 100f2.
Измерения с использованием тестового сигнала повторяют, последовательно уменьшая амплитуду входного сигнала в 10 раз до тех пор, пока измеренное и показанное значение не будет по крайней мере в три раза превышать верхнюю границу линейного рабочего диапазона.
Далее измерения повторяют для импульса с одним циклом заполнения, повышая его амплитуду до тех пор, пока не появится индикация перегрузки.
Показания средства измерений в ответ на последовательность прямоугольных импульсов с заполнением, приведенные к единичной амплитуде тестового сигнала, должны быть в пределах допуска, как установлено в таблицах 7 - 9. Максимальная расширенная неопределенность измерений - 3 %.
12.14 Индикация перегрузки
Испытания на индикацию перегрузки проводят, подавая на вход положительные и отрицательные полусинусоиды на опорной частоте и на частотах, указанных в таблице 14. Средство измерений настраивают на измерения с использованием полосового фильтра в опорном диапазоне частот и, подавая на вход сигнал в форме положительной полусинусоиды, повышают его амплитуду до тех пор, пока не появится сигнал перегрузки. Затем ту же процедуру повторяют для отрицательной полусинусоиды. В обоих случаях регистрируют амплитуду сигнала, при которой наступает состояние перегрузки. Разность между этими двумя амплитудами не должна превышать пределов допуска, установленных в 5.10. Максимальная расширенная неопределенность измерений - 2 %.
Примечание - Кроме испытаний на частотах, установленных в настоящем разделе, испытания на индикацию перегрузки могут быть проведены на других частотах по выбору испытательной лаборатории.
Индикация перегрузки должна появляться каждый раз, как только амплитуда входного сигнала превышает значение, при котором данная индикация наблюдается впервые, вплоть до максимальной амплитуды входного сигнала, определенной в технической документации.
При измерениях параметров, основанных на текущем среднеквадратичном значении корректированного ускорения, или пиковых значений индикатор перегрузки должен блокироваться сразу по достижении состояния перегрузки, как указано в 5.10. Если средство измерений используют для измерений вибрации с экспоненциальным усреднением по времени, индикатор перегрузки должен работать так, как указано в 5.10.
12.15 Сброс показаний
Следует подтвердить, что устройство сброса показаний позволяет обнулить показания данного показывающего устройства и при этом не появляются неверные показания на других показывающих устройствах.
12.16 Измерение полной вибрации
В процессе данного испытания проверяют, удовлетворяет ли процедура суммирования результатов измерения вибрации по нескольким направлениям требованиям соответствующих стандартов, определяющих правила измерения полной вибрации.
Средство измерений настраивают на проведение измерений в опорном диапазоне. Электрический сигнал, соответствующий опорному сигналу вибрации, по очереди подают на вход каждого канала, соответствующего своей измерительной оси. Полученный для данной оси результат измерений фиксируют и используют для расчета полной вибрации согласно соответствующему стандарту: ИСО 5349-1, ИСО 2631-1, ИСО 2631-2 или ИСО 2631-4. Далее тот же опорный сигнал одновременно подают на все три измерительных канала. Измеренное и показанное значение полного ускорения должно соответствовать расчетному в пределах ± 3 %.
После этого сигнал на входе одного из каналов инвертируют (изменяют фазу на 180°) и снова измеряют полную вибрацию. Полученный результат не должен отличаться от предыдущего более чем на 2 %.
При измерениях общей вибрации частотные коррекции, используемые для измерений вибрации в направлениях х, у и z, а также коэффициенты k, применяемые для измерений по каждой из осей, зависят от назначения измерений - будут ли они использованы для оценки влияния вибрации на состояние здоровья, комфорт или для проверки чувствительности к вибрации. Для получения расчетных значений полной вибрации следует использовать ИСО 2631-1.
12.17 Аналоговый выход
Электрический сигнал, соответствующий опорному сигналу вибрации на опорной частоте в опорном диапазоне измерений, подают на вход измерительного блока, после чего регистрируют показания средства измерений. Затем аналоговый выход замыкают накоротко и вновь регистрируют показания. Разность между двумя показаниями не должна превышать пределов допуска, установленных в 5.3.
12.18 Устройства измерения времени
Необходимо проверить, что минимальный период интегрирования при усреднении сигнала вибрации по времени не превосходит значения, заявленного в технической документации, а максимальный период интегрирования при усреднении по времени не меньше соответствующего заявленного значения.
Устанавливают время измерения вибрации, равное 2000 с. Фактическая продолжительность измерения не должна отличаться от установленного значения более чем на ± 2 с (± 0,1 %). Максимальная расширенная неопределенность измерений - 0,01 %.
12.19 Питание
С помощью калибратора, поставляемого вместе со средством измерений, возбуждают вибрацию в опорном диапазоне измерений, после чего записывают показания, полученные при номинальном и минимально допустимом по технической документации напряжении питания. Полученные результаты измерений должны быть одинаковыми в пределах допуска по 5.18.
Примечание - Под питанием понимают также питание от батарей.
12.20 Испытания на воздействие внешних факторов, электростатических разрядов и радиочастотных электромагнитных полей
12.20.1 Общие положения
Полностью собранное и готовое к проведению измерений средство измерений должно удовлетворять всем требованиям настоящего раздела с учетом особенностей его назначения. Акселерометр должен быть соединен с измерительным блоком таким образом, чтобы обеспечить нормальный режим работы в соответствии с технической документацией.
Все требования по чувствительности к воздействию внешних факторов проверяют для включенного средства измерений, настроенного на функционирование в нормальном режиме работы.
Перед проведением испытаний (но не в их процессе) необходимо проверить показания на опорной частоте с помощью калибратора (см. 5.4) и, при необходимости, выполнить соответствующие регулировки, чтобы показания средства измерений соответствовали значению опорного сигнала вибрации в нормальных условиях. Для регулировки следует использовать процедуры, указанные в технической документации.
Поскольку вибрация, воспроизводимая калибратором, также может изменяться при изменении внешних воздействующих факторов, это влияние следует учитывать таким образом, как указано в технической документации.
Регистрируют значения внешних воздействующих факторов, имевших место во время проверки показаний средства измерений. При проведении испытаний калибратор должен воспроизводить заданный сигнал вибрации. Средство измерений настраивают для выполнения измерений среднеквадратичного значения корректированного ускорения.
Показания регистрируют для всех условий испытаний.
12.20.2 Расширенная неопределенность для измерений климатических факторов
Расширенная неопределенность измерений не должна превышать 0,3 °С для измерений температуры воздуха и 10 % для измерений относительной влажности.
12.20.3 Требования по акклиматизации для испытаний на влияние температуры и относительной влажности воздуха
Для проведения испытаний на влияние температуры и относительной влажности воздуха на работу средства измерений калибратор и средство измерений (или его соответствующие элементы) устанавливают в климатической камере.
На период акклиматизации акселерометр должен быть удален со стола вибростенда, а питание - как калибратора, так и средства измерений - отключено.
Продолжительность акклиматизации к заданным условиям окружающей среды - не менее 12 ч.
По завершении периода акклиматизации акселерометр устанавливают на стол калибратора и включают питание калибратора и средства измерений.
12.20.4 Комбинированные испытания на влияние температуры и относительной влажности воздуха
По завершении процедуры акклиматизации, описанной в 12.20.3, посредством калибратора воспроизводят заданное вибрационное возбуждение и регистрируют показания средства измерений для приведенных ниже сочетаний значений температуры и относительной влажности воздуха. Для средства измерений, у которого все элементы могут нормально функционировать в условиях температуры и относительной влажности, указанных в 7.2, испытания проводят при следующих сочетаниях параметров:
- нормальные условия по температуре и относительной влажности воздуха;
- температура минус 10 °С, относительная влажность 65 %;
- температура плюс 5 °С, относительная влажность 25 %;
- температура плюс 40 °С, относительная влажность 90 %;
- температура плюс 50 °С, относительная влажность 50 %.
Для каждых условий испытаний отклонение измеренного значения параметра вибрации от полученного в нормальных условиях температуры и относительной влажности воздуха не должно превышать значения, установленного в 7.2.
12.20.5 Влияние температуры поверхности
После акклиматизации калибратором воспроизводят возбуждение вибрации в нормальных условиях температуры и относительной влажности и регистрируют результаты измерений для приведенных ниже значений температуры поверхности. Акселерометр с соответствующей системой крепления устанавливают непосредственно на поверхность, температуру которой поддерживают в пределах ± 5 °С при следующих заданных значениях:
- нормальная температура;
- температура поверхности минус 10 °С;
- температура поверхности плюс 5 °С;
- температура поверхности плюс 40 °С;
- температура поверхности плюс 50 °С.
Для каждых условий испытаний отклонение измеренного значения вибрации от полученного в нормальных условиях температуры поверхности не должно превышать значения, установленного в 7.3.
12.20.6 Влияние электростатических разрядов
Оборудование, необходимое для определения влияния электростатических разрядов на работу средства измерений, должно соответствовать требованиям МЭК 61000-4-2, раздел 6. Испытательная установка и процедуры испытаний должны соответствовать требованиям МЭК 61000-4-2, разделы 7 и 8.
Испытания на воздействие электростатического разряда проводят в режиме работы средства измерений, когда оно наиболее восприимчиво к действию разряда, что должно быть определено в ходе предшествующих испытаний. Если к средству измерений подсоединены устройства, которые согласно технической документации не требуются для его работы в нормальном режиме применения, используемые для этого соединительные кабели должны быть разъединены. Конфигурация средства измерений, установленная для проведения испытаний, должна быть зафиксирована.
Не следует производить разрядов электростатического напряжения на утопленные вглубь штырьки электрических разъемов.
Электростатические разряды напряжений соответствующей полярности, определенные в 7.4, должны быть приложены 10 раз контактным способом и 10 раз через воздух. Точки, на которые подают разряды, определяют по выбору испытательной лаборатории (см. МЭК 61000-4-2). При этом данные точки должны быть легкодоступны при нормальном использовании средства измерений. Если в соответствии с требованиями пользователя ему необходим доступ к точкам внутри измерительного блока, эти точки также должны быть использованы в процессе испытаний, если только руководство по эксплуатации средства измерений не содержит предупреждение о возможном повреждении при доступе внутрь вследствие возможных электростатических разрядов.
Необходимо обращать внимание на то, чтобы воздействие разряда и вызываемые им процессы заканчивались полностью до приложения следующего разряда.
Средство измерений настраивают для измерений в опорном диапазоне, напряжения контактного и воздушного разрядов должны принимать максимальные положительные и отрицательные значения.
После приложения разряда средство измерений должно возвращаться в то же рабочее состояние, что и до разряда. Любые данные, хранимые средством измерений до разряда, не должны изменяться после его воздействия. В процессе приложения разряда допустимы незначительные сбои в работе средства измерений.
12.20.7 Излучение радиочастотного поля и возмущения в сети питания
Уровни напряженности поля излучения в области радиочастот в децибелах относительно опорного значения 1 мВ/м измеряют с помощью квазипикового детектора в диапазонах частот, определенных в 7.5. Измерительные приемники, антенны и процедуры испытаний должны соответствовать требованиям CISPR 22, раздел 10. Уровни излучений должны соответствовать требованиям 7.5. Следует зарегистрировать условия окружающей среды, которые имели место на момент испытаний. Испытания на излучение радиочастотного поля проводят для средства измерений, работающего в режиме, установленном технической документацией, когда его излучение максимально.
Приспособления и крепления, используемые для сохранения заданного положения измерительного блока, не должны оказывать существенного влияния на измерения излучаемых им полей.
Вначале уровни излучения измеряют в диапазонах частот, установленных в 7.5, в основной плоскости излучения средства измерений при его нормальной ориентации. Присоединенный через кабель акселерометр располагают по центру корпуса измерительного блока на высоте приблизительно 250 мм. Если длина кабеля превышает 250 мм, он должен быть свернут восьмеркой с четным числом колец равного размера; все кольца должны быть скреплены между собой у каждого из краев и в середине.
При сохранении данного взаимного расположения акселерометра, кабеля и измерительного блока измеряют уровни радиочастотного излучения еще, по крайней мере, в одной плоскости излучения. Дополнительные плоскости излучения должны быть примерно ортогональны основной плоскости для данной ориентации средства измерений в пределах, установленных для оборудования при измерении радиочастотного излучения.
Если измерительный блок имеет разъемы для подключения других устройств непосредственно или через соединительные кабели, уровни радиочастотного излучения измеряют после того, как все дополнительные устройства будут подсоединены. Длины кабелей должны соответствовать рекомендациям технической документации. Все кабели должны быть без заглушек и установлены так, как предписано CISPR 22, пункт 8.1 (если только устройство, подсоединяемое кабелем, не поставляют в одном комплекте со средством измерений, - в этом случае уровни радиочастотного излучения измеряют, когда все устройства соединены между собой установленным способом).
Если к одному разъему могут быть подключены разные устройства, измерение уровней радиочастотного излучения проводят для той конфигурации, которая определена в технической документации как производящая излучение наибольшего уровня. Другие конфигурации, для которых имеет место тот же или более низкий уровень излучения, могут быть включены в технической документации в перечень конфигураций, для которых проведение испытаний не требуется, если для основной конфигурации выполнены все требования по 7.5.
Если средство измерений работает от сети переменного тока, проводят измерения возмущений, вносимых им в сеть, в соответствии с CISPR 22, раздел 9, и эти возмущения должны удовлетворять ограничениям, указанным в 7.5 и таблице 8 настоящего стандарта.
12.20.8 Устойчивость к радиочастотному электромагнитному полю и помехам сетевой частоты
В процессе испытаний средство измерений должно быть включено и работать нормальным образом.
Устойчивость к радиочастотному электромагнитному полю и помехам сетевой частоты проверяют с использованием тестового сигнала вибрации, снимаемого и передаваемого на измерительный блок с помощью акселерометра. Тестовый сигнал представляет собой синусоидальную вибрацию на опорной частоте. В отсутствие радиочастотного электромагнитного поля и помех сетевой частоты среднеквадратичное значение ускорения после прохождения полосового фильтра должно соответствовать значениям таблицы 16. Если средство измерений имеет несколько измерительных диапазонов, то измеренные значения вибрации должны быть показаны в том из них, нижняя граница которого максимально близка к граничным значениям, указанным в таблице 16, но не превышает их.
Таблица 16 - Условия испытаний на устойчивость к радиочастотному электромагнитному полю и помехам сетевой частоты
|
С.к.з. вибрации, м/с2 |
Максимальное значение нижней границы измерительного диапазона, м/с2 |
|
|
Локальная вибрация |
2 |
1 |
|
Общая вибрация |
0,2 |
0,1 |
|
Общая низкочастотная вибрация |
0,2 |
0,1 |
Возбуждаемая в процессе испытаний вибрация не должна оказывать влияния на тестовые электромагнитные поля. Она не должна также влиять на нормальную работу средства измерений и на его чувствительность к воздействию радиочастотного электромагнитного поля и помех сетевой частоты.
После приложения тестового электромагнитного поля изменения измеренного параметра вибрации не должны превышать ± 10 %.
Устойчивость средств измерений с входными и, при их наличии, выходными портами электропитания переменного тока к влиянию кондуктивных помех проверяют в диапазоне частот от 0,15 до 80 МГц. Электромагнитное поле должно быть модулировано синусоидальным сигналом опорной частоты с глубиной модуляции 80 %. В отсутствие модуляции среднеквадратичное значение радиочастотного напряжения для источника с импедансом 150 Ом должно составлять 10 В. Устойчивость к быстротекущим переходным процессам в сети питания проверяют при воздействии наносекундных импульсных помех с пиковым напряжением 2 кВ и частотой повторения 5 кГц в соответствии с МЭК 61000-6-2, таблица 4. Дополнительные требования по устойчивости к провалам, прерываниям и выбросам напряжения электропитания проверяют по МЭК 61000-6-2, таблица 4.
Для средств измерений с портами ввода-вывода сигналов, у которых длины кабелей, соединяющих различные части измерительной системы, превышают 3 м, проверяют устойчивость к влиянию кондуктивных помех в диапазоне частот от 0,15 до 80 МГц при среднеквадратичном значении напряжения 10 В в отсутствие модуляции по МЭК 61000-6-2, таблица 2. Устойчивость к быстротекущим переходным процессам в сети питания проверяют при воздействии наносекундных импульсных помех с пиковым напряжением 1 кВ и частотой повторения 5 кГц в соответствии с МЭК 61000-6-2, таблица 2.
Согласно МЭК 61000-4-6 средство измерений локальной вибрации испытывают на устойчивость к кондуктивным помехам в заданном диапазоне радиочастот с применением эквивалента руки, охватывающего корпус прибора.
Технической документацией может быть установлено, что средство измерений удовлетворяет требованиям по устойчивости к воздействию радиочастотного электромагнитного поля и сетевых помех для среднеквадратичных значений вибрации менее тех, что указаны в таблице 16. В этом случае средство измерений должно удовлетворять требованиям к допустимым изменениям показаний для всех значений параметра вибрации в диапазоне от указанных в таблице 16 до установленных технической документацией. В процессе испытаний используют более низкие значения вибрации, установленные технической документацией.
12.21 Протокол испытаний
В протоколе испытаний должны быть подробно отражены следующие сведения: конфигурации средства измерений, его положение в пространстве во время испытаний, условия испытаний, результаты испытаний, включая расширенную неопределенность измерений для данной испытательной лаборатории. В протокол испытаний должен быть включен вывод, удовлетворяет или не удовлетворяет испытуемое средство измерений требованиям настоящего стандарта.
Кроме того, следует включать дополнительную информацию об испытаниях согласно МЭК 61000-4-3, раздел 8. В протоколе испытаний должны быть отражены все наблюдавшиеся ухудшения в работе средства измерений, отказы в выполнении каких-либо функций или потеря данных в конце серии испытаний на влияние электростатических разрядов, а также на воздействие радиочастотных электромагнитных полей и помех сетевой частоты.
13 Поверка
13.1 Общие положения
В настоящем разделе рассмотрены различные аспекты испытаний, проводимых для проверки соответствия средства измерений всем обязательным требованиям настоящего стандарта, и описаны методы таких испытаний.
Соответствие требованиям настоящего стандарта считают подтвержденным, если отклонение результата измерений от заданного значения с учетом расширенной неопределенности измерений для данной испытательной лаборатории полностью лежит в пределах допуска.
Неопределенность измерений определяют в соответствии с «Руководством по выражению неопределенности измерений». Расширенную неопределенность измерений рассчитывают в испытательной лаборатории, используя для этого значение коэффициента охвата, равное двум или более.
В настоящем разделе приведена максимальная расширенная неопределенность измерений, которая допустима при проверке соответствия требованиям настоящего стандарта. Испытания на подтверждение соответствия требованиям настоящего стандарта не могут быть проведены испытательными лабораториями, у которых расчетные значения расширенной неопределенности измерений превышают максимально допустимые значения.
Не допускается исключение какого-либо из испытаний, описанных в настоящем разделе, кроме тех, что относятся к функциям, не реализованным данным средством измерений.
Если не оговорено иное, все испытания, описанные в настоящем разделе, должны быть проведены для каждого канала многоканального средства измерений.
13.2 Требования испытаний
Все измерительные приборы, которые применяют в процессе испытаний на подтверждение заявленных характеристик, должны быть аттестованы и поверены в соответствии с национальной метрологической схемой.
Частота входных сигналов должна находиться в пределах ± 0,2 % требуемого значения.
Значения параметров вибрации должны находиться в пределах ± 3 % требуемых значений.
В процессе испытаний климатические факторы окружающей среды должны находиться в следующих пределах:
- температура: от 19 °С до 27 °С;
- относительная влажность: от 10 % до 75 % (без выпадения конденсата).
Коэффициент гармоник d для синусоидальной вибрации на входе не должен превышать 5 %.
Коэффициент гармоник d для входного электрического сигнала не должен превышать 0,1 %.
13.3 Представление средства измерений на испытания
Средство измерений должно быть представлено на испытания вместе с датчиком вибрации. Датчик вибрации может быть другим по сравнению с тем, что был использован при испытаниях для целей утверждения типа, но должен обладать такими же характеристиками.
13.4 Маркировка средства измерений и информация, содержащаяся в технической документации
Необходимо убедиться, что маркировка средства измерений соответствует требованиям раздела 9.
Перед проведением испытаний необходимо убедиться, что техническая документация на средство измерений содержит все сведения, требуемые по разделу 10, в соответствии с назначением данного средства измерений. По завершении испытаний все положения технической документации должны быть заново пересмотрены с целью убедиться в их правильности и в том, что все заявленные параметры находятся в пределах допусков, установленных настоящим стандартом.
13.5 Обязательные функции средства измерений и общие требования
Необходимо убедиться, что средство измерений соответствует требованиям 5.1.
Для средства измерений с несколькими диапазонами измерений необходимо убедиться, что перекрытие диапазонов соответствует требованиям 5.7.
Необходимо убедиться, что показывающее устройство соответствует требованиям 5.2.
Если технической документацией предписано использование батарей питания конкретной модели и типа, их следует установить до начала испытаний.
Необходимо убедиться, что средство измерений позволяет выводить результаты измерений сигнала после прохождения им полосового фильтра функции частотной коррекции, по крайней мере, в целях испытаний на подтверждение характеристик.
Если средство измерений не удовлетворяет требованиям, перечисленным в настоящем разделе, испытания на соответствие требованиям настоящего стандарта не проводят.
13.6 Начальная подготовка средства измерений к испытаниям
Перед проведением любого испытания и выполнения операций, указанных в технической документации, необходимо проверить коэффициент преобразования средства измерений на опорной частоте для опорного сигнала вибрации. При необходимости для настройки коэффициента преобразования следует провести все регулировки в соответствии с 5.4 и требованиями технической документации таким образом, чтобы средство измерений показывало истинное значение параметра вибрации в нормальных условиях окружающей среды.
13.7 Показания при измерениях на опорной частоте в нормальных условиях
Необходимо определить погрешность показаний ускорения опорного сигнала на опорной частоте как разность между значением, показанным средством измерений, и тем, что получен в результате измерений в той же точке с помощью эталонного акселерометра.
Погрешность измерения e параметра atest выражают в процентах измеренного с помощью эталонного акселерометра значения aref [см. формулу (15)].
Вначале амплитуду воспроизводимого опорного сигнала измеряют с помощью эталонного акселерометра, а затем проводят измерения, используя испытуемое средство измерений. Для этого средство измерений настраивают на измерения в опорном диапазоне, устанавливают режим полосовой фильтрации и линейного интегрирования и проводят измерения в течение не менее чем 30 с для локальной вибрации, 1 мин для общей вибрации и 5 мин для общей низкочастотной вибрации. Сигнал на входе измерительной цепи (сумма полезного сигнала и фонового шума) должен превышать фоновый шум не менее чем в 10 раз.
Для определения погрешности измерения проводят не менее трех измерений. Интервал между измерениями должен превышать время стабилизации, указанное в технической документации, чтобы перед получением нового показания были достигнуты одинаковые условия измерений. Разность между минимальным и максимальным показаниями для серии из трех измерений не должна превышать 3 %.
Среднеарифметическое значение погрешности показаний измерений должно быть в пределах допусков, установленных в таблице 2. Максимальная расширенная неопределенность измерения - 2 %.
Для каждой функции частотной коррекции на устройство входа электрического сигнала подают стационарный синусоидальный сигнал на опорной частоте. Регулируют амплитуду входного электрического сигнала таким образом, чтобы средством измерений было показано заданное значение для включенного фильтра частотной коррекции. Далее тот же электрический сигнал пропускают через полосовой фильтр, соответствующий той же функции частотной коррекции, умножают измеренное значение на значение функции частотной коррекции на опорной частоте (см. таблицу 1) и сравнивают с предыдущим измерением. Разность результатов измерений должна быть в пределах допуска, установленного в таблице 2. Максимальная расширенная неопределенность измерения - 2 %.
Для средств измерений, реализующих интегрирование по времени с использованием временного окна, на входное устройство подают стационарный синусоидальный электрический сигнал опорной частоты. Амплитуду входного сигнала регулируют таким образом, чтобы показания средства измерений с включенным полосовым фильтром функции частотной коррекции совпадали с заданным значением опорного сигнала в опорном диапазоне. Затем для того же входного сигнала получают показания с использованием временного окна. Разность между двумя показаниями должна быть в пределах допуска, установленного в таблице 2. Максимальная расширенная неопределенность измерения - 2 %.
13.8 Взаимное влияние измерительных каналов
Для средства измерений, имеющего два и более измерительных канала (например, предназначенного для измерений трехкомпонентной вибрации), проводят испытания по определению помех, создаваемых каналами друг другу.
Все каналы должны быть настроены на измерения в опорном диапазоне. На каждый канал по очереди подают опорный электрический сигнал на опорной частоте - в это время входы других каналов должны быть заглушены. Амплитуда тестового сигнала должна быть в пределах 5 дБ верхней границы диапазона измерений. В процессе испытания контролируют выход каждого из каналов.
В отношении выходного сигнала для каждого из каналов должны быть выполнены требования 5.16.
13.9 Линейность по амплитуде и индикация нечувствительности по входу
Испытания средства измерений на линейность по амплитуде проводят с использованием тестового стационарного синусоидального электрического сигнала на частотах, указанных в таблице 14. Линейность по амплитуде проверяют по измерениям параметра, требующего усреднения по времени, с установленным полосовым фильтром функции частотной коррекции.
Испытания на линейность в каждом диапазоне, за исключением опорного, на каждой тестовой частоте начинают с подачи тестового сигнала, амплитуда которого равна амплитуде опорного сигнала в опорном диапазоне частот, умноженной на коэффициент ослабления для данного диапазона измерений по отношению к опорному.
Тестовый сигнал подают на электрический вход измерительного блока. Амплитуду сигнала регулируют таким образом, чтобы показание средства измерений в опорном диапазоне совпадало со значением амплитуды опорного сигнала.
В опорном диапазоне измерений амплитуду входного сигнала на опорной частоте повышают с шагом приращения, указанным в таблице 14, от нижней границы диапазона до того значения, при котором впервые появляется индикация перегрузки. После этого амплитуду входного сигнала понижают с шагом, указанным в таблице 14, от значения, когда впервые наблюдалась индикация перегрузки, до заданной нижней границы. При этом регистрируют значения амплитуд входного сигнала и соответствующие им показания средства измерений.
Для каждой тестовой частоты и амплитуды сигнала - от нижней границы опорного диапазона до первого появления индикации перегрузки - отклонения от линейности по амплитуде должны быть в пределах допуска по 5.7. Протяженность линейного рабочего диапазона на опорной частоте в опорном диапазоне измерений должна удовлетворять требованиям к линейному рабочему диапазону по 5.7. Значение функции частотной коррекции для электрического сигнала на опорной частоте равно единице. Максимальная расширенная неопределенность измерения - 2 %.
После испытаний в опорном диапазоне проверяют линейность по амплитуде в низшем и высшем диапазонах измерений. Испытания проводят для частот и приращений амплитуды сигнала, заданных в таблице 14, от начальной амплитуды вниз до нижней границы и вверх до верхней границы каждого диапазона измерений.
В каждом диапазоне измерений отклонение от линейности по амплитуде должно быть в пределах допуска по 5.7 на протяжении всего линейного рабочего диапазона, заданного технической документацией, и до появления индикации перегрузки. Максимальная расширенная неопределенность измерения - 2 %.
Для средства измерений, осуществляющего интегрирование сигнала ускорения с использованием временного окна, у которого линейный рабочий диапазон превышает диапазон значений показывающего устройства, линейность по амплитуде может быть проверена с использованием тональной посылки, для которой амплитуда сигнала заполнения превышает верхнюю границу показываемых значений.
Для средств измерений, реализующих линейное усреднение по времени и имеющих рабочий диапазон, который превышает диапазон показываемых значений, линейность по амплитуде в диапазоне выше верхней границы показываемых значений может быть проверена с использованием прямоугольного импульса с заполнением, вырезанного из стационарного входного сигнала. Длительность импульса должна быть не менее 30 с для локальной вибрации и 5 мин для общей вибрации (для общей низкочастотной вибрации это испытание не проводят). Период интегрирования должен превышать длительность импульса.
Для каждого диапазона измерений и для каждой тестовой частоты в случае, когда показание средства измерений выше или равно заданной нижней границе диапазона измерений, индикация нечувствительности должна отсутствовать. Для каждого диапазона измерений и каждой тестовой частоты индикация нечувствительности должна появляться, как только уровень сигнала понижается на 1 дБ относительно нижней границы данного диапазона измерений.
13.10 Функции частотной коррекции и частотные характеристики соответствующих фильтров1)
1) В данном подразделе исправлены ошибки оригинала (ИСО 8041:2005).
13.10.1 Общие положения
Описанные в настоящем пункте методы оценки функции частотной коррекции и частотных характеристик фильтров предполагают отсутствие у средства измерений электрического выхода. При наличии электрического выхода и возможности его использования при испытании сначала проверяют соответствие между показаниями измеренного и показанного параметра корректированного ускорения и напряжениями на электрическом выходе. Данные, полученные в ходе испытаний по проверке частотных характеристик, не следует пытаться интерпретировать в целях оценки нелинейности.
Выбирают по одной функции частотной коррекции для каждого возможного применения средства измерений (оценка локальной, общей или общей низкочастотной вибрации), для которых испытания проводят с использованием как электрического, так и механического тестовых сигналов. Для остальных функций частотной коррекции испытания проводят с использованием только одного тестового сигнала - электрического или механического.
По возможности испытания проводят в опорном диапазоне измерений. При наличии сомнений в том, что требования к частотным характеристикам одинаково соблюдены для разных диапазонов измерений, проводят дополнительные испытания в других диапазонах. Все измерения выполняют в той области измерительного диапазона, где отклонения от линейности находятся в пределах допуска по 5.7.
Испытания частотных характеристик проводят с шагом приращения частоты не более чем в одну октаву в диапазонах частот, указанных в таблице 15.
Примечание - Методы испытаний фазочастотной характеристики функции частотной коррекции приведены в приложении Н.
13.10.2 Испытания с использованием механического тестового сигнала
Для оценки погрешности реализации частотной характеристики средства измерений проводят измерения ускорения (без частотной коррекции) с помощью эталонного акселерометра. Погрешность частотной характеристики определяют как разность между показанием средства измерений и произведением полученного с помощью эталонного акселерометра среднеквадратичного значения ускорения на значение функции частотной коррекции для данной частоты тестового сигнала. Акселерометр, входящий в состав испытуемого средства измерений, и эталонный акселерометр устанавливают так, как предписано ИСО 16063-21.
На опорной частоте регулируют амплитуду вибрации таким образом, чтобы измеренное средством измерений значение ускорения (после прохождения полосового фильтра) на 20 дБ превышало нижнюю границу заданного диапазона линейности. Заданную таким образом амплитуду тестового сигнала аin используют как базовое значение входного сигнала в последующих испытаниях.
Для каждой тестовой частоты с помощью эталонного акселерометра регулируют амплитуду тестового сигнала таким образом, чтобы она была равна аin. Для каждой тестовой частоты, определенной в соответствии с таблицей 15, регистрируют воспроизводимый входной сигнал и соответствующее показание средства измерений ajnd.
Относительную погрешность реализации e(f) частотной характеристики на частоте f определяют по формуле (16).
При определении амплитуды воспроизведенной на разных тестовых частотах вибрации учитывают частотную характеристику эталонного акселерометра.
Если входное ускорение аin невозможно поддерживать постоянным во всем диапазоне частот, в измеренное средством измерений значение нужно внести соответствующую поправку, определяемую разностью результатов измерений, выполненных с помощью эталонного акселерометра, на тестовой и опорной частотах. Кроме того, при использовании на разных тестовых частотах разных амплитуд ускорения в измеренный сигнал следует внести соответствующую поправку на нелинейность.
В приложении F приведена информация об испытании системы крепления акселерометра.
13.10.3 Испытания с использованием электрического тестового сигнала Синусоидальный электрический сигнал подают на электрический вход измерительного блока. На опорной частоте регулируют амплитуду тестового сигнала таким образом, чтобы измеренное средством измерений значение (после прохождения сигналом полосового фильтра) на 20 дБ превышало нижнюю границу заданного диапазона линейности. Заданную таким образом амплитуду тестового сигнала ajnd используют как базовое значение в последующих испытаниях.
Для каждой тестовой частоты среднеквадратичное значение тестового сигнала vjn регулируют таким образом, чтобы после прохождения сигналом соответствующего фильтра частотной коррекции на показывающем устройстве средства измерений появилось заданное базовое значение ajnd. Для каждой тестовой частоты, определенной в соответствии с таблицей 15, регистрируют значение амплитуды входного сигнала и соответствующее показание средства измерений ajnd.
Относительную погрешность частотной характеристики электрической цепи ee(f) на частоте f определяют по формуле (19).
На любой тестовой частоте сумма среднеквадратичных значений входного сигнала и собственного шума должна по крайней мере в 10 раз превышать среднеквадратичное значение фонового шума.
Если невозможно поддерживать одно и то же показание ajnd во всем диапазоне частот, в измеренное средством измерений значение нужно внести соответствующую поправку, определяемую разностью входного электрического сигнала на тестовой и опорной частотах. Кроме того, при использовании на разных тестовых частотах разных амплитуд тестового сигнала в измеренный сигнал следует внести соответствующую поправку на нелинейность.
Максимальная расширенная неопределенность измерений для всех тестовых частот - 3 %.
13.10.4 Проверка соответствия требованиям для других функций частотной коррекции
Для тех функций частотной коррекции, где в процессе испытаний был использован механический тестовый сигнал, относительную погрешность частотной характеристики определяют непосредственно по результатам испытаний как e(f) [см. формулу (16)]. Если во время испытаний был использован только электрический тестовый сигнал, тогда для получения общей относительной погрешности частотной характеристики необходимо принимать во внимание относительную погрешность частотной характеристики датчика вибрации et(f). Значения этой величины определяют, вычитая ee(f) из e(f) для тех испытаний, где были использованы как электрический, так и механический тестовые сигналы.
Пример - Средство измерений позволяет проводить измерения с использованием двух функций частотной коррекции: Wd и Wk. Для Wd испытания проводят с использованием электрического и механического тестовых сигналов, относительную погрешность частотной характеристики датчика вибрации определяют как разность между погрешностями, полученными с использованием механического и электрического тестовых сигналов. Эту погрешность добавляют к погрешности, полученной при использовании электрического тестового сигнала для частотной характеристики Wk, чтобы получить общую относительную погрешность для данной частотной характеристики средства измерений.
Для всех реализуемых средством измерений функций частотной коррекции погрешность частотной характеристики должна быть в пределах допуска по 5.6. Максимальная расширенная неопределенность для всех тестовых частот - 5 %.
Если средство измерений позволяет проводить измерение с использованием дополнительных функций частотной коррекции, погрешность их реализации определяют с учетом их назначения и допусков, установленных технической документацией.
13.11 Собственный шум измерительной цепи
Собственный шум измерительной цепи определяют по усреднению результатов десяти измерений вибрации с использованием датчика, установленного на невибрирующем объекте. В процессе испытаний проводят измерения как среднеквадратичного значения корректированного ускорения, так и текущего среднеквадратичного значения корректированного ускорения. При измерении среднеквадратичного значения ускорения период интегрирования выбирают равным 1 мин в режиме измерения локальной вибрации, 5 мин - в режиме измерения общей вибрации и 30 мин - в режиме измерения общей низкочастотной вибрации.
13.12 Показания в ответ на сигнальную посылку1)
1) В обоснованных случаях (например, если средство измерений реализует цифровую технику обработки данных и не предназначено для измерений параметров, чувствительных к фазе сигнала) допускается в ходе периодических поверок испытания данного вида, а также испытания по приложению Н не проводить.
Средство измерений устанавливают в режим измерения сигнала после полосовой фильтрации в опорном диапазоне измерений, подают на вход стационарный синусоидальный электрический сигнал на частоте, определенной в таблице 6, после чего амплитуду сигнала регулируют таким образом, чтобы показание средства измерений соответствовало 50 % верхней границы линейного рабочего диапазона. Затем для всех применяемых временных окон и функций частотной коррекции используют последовательности импульсов, определенные в таблице 6.
Область спада для пилообразного импульса не должна превышать 1/(5f2), где f2 - верхняя граница диапазона полосовой фильтрации для данной функции частотной коррекции, определенная в таблице 3.
Чтобы исключить влияние на результат испытаний высокочастотных переходных процессов, которые имеют место при отключении тестового сигнала, между генератором сигнала и испытуемым средством измерений можно установить однополюсный низкочастотный фильтр. Частота среза фильтра должна быть достаточно высока, чтобы исключить его влияние на результаты испытаний, например 100f2.
Измерения с использованием тестового сигнала повторяют, последовательно уменьшая амплитуду входного сигнала в 10 раз до тех пор, пока измеренное и показанное значение не будет по крайней мере в три раза превышать верхнюю границу линейного рабочего диапазона.
Далее измерения повторяют для импульса с одним циклом заполнения, повышая его амплитуду до тех пор, пока не появится индикация перегрузки.
Показания средства измерений в ответ на последовательность прямоугольных импульсов с заполнением, приведенные к единичной амплитуде тестового сигнала, должны быть в пределах допуска, как установлено в таблицах 7 - 9. Максимальная расширенная неопределенность измерений - 3 %.
13.13 Индикация перегрузки
Испытания на индикацию перегрузки проводят, подавая на вход положительные и отрицательные полусинусоиды на опорной частоте. Средство измерений настраивают на измерения с использованием полосового фильтра в опорном диапазоне частот и, подавая на вход сигнал в форме положительной полусинусоиды, повышают его амплитуду до тех пор, пока не появится сигнал перегрузки. Далее ту же процедуру повторяют для отрицательной полусинусоиды. В обоих случаях регистрируют амплитуду сигнала, при которой наступает состояние перегрузки. Разность между этими двумя амплитудами не должна превышать пределов допуска, установленных в 5.10. Максимальная расширенная неопределенность измерений - 2 %.
Примечание - Испытания на индикацию перегрузки могут быть проведены также на других частотах по выбору испытательной лаборатории.
Индикация перегрузки должна появляться каждый раз, как только амплитуда входного сигнала превышает значение, при котором данная индикация наблюдается впервые, вплоть до максимальной амплитуды входного сигнала, определенной в технической документации.
При измерениях параметров, основанных на текущем среднеквадратичном значении корректированного ускорения, или пиковых значений индикатор перегрузки должен блокироваться сразу по достижении состояния перегрузки, как указано в 5.10. Если средство измерений используют для измерений вибрации с экспоненциальным усреднением по времени вибрации, индикатор перегрузки должен работать так, как указано в 5.10.
13.14 Сброс показаний
Следует подтвердить, что устройство сброса показаний позволяет обнулить показания данного показывающего устройства и при этом не появляются неверные показания на других показывающих устройствах.
13.15 Измерение полной вибрации
В процессе данного испытания проверяют, удовлетворяет ли процедура суммирования результатов измерения вибрации по нескольким направлениям требованиям соответствующих стандартов, определяющих правила измерения полной вибрации.
Средство измерений настраивают на проведение измерений в опорном диапазоне. Электрический сигнал, соответствующий опорному сигналу вибрации, по очереди подают на вход каждого канала, соответствующего своей измерительной оси. Полученный для данной оси результат измерений фиксируют и используют для расчета полной вибрации согласно соответствующему стандарту: ИСО 5349-1, ИСО 2631-1, ИСО 2631-2 и ИСО 2631-4. Далее тот же опорный сигнал одновременно подают на все три измерительных канала. Измеренное и показанное значение полного ускорения должно соответствовать расчетному в пределах ± 3 %.
После этого сигнал на входе одного из каналов инвертируют (изменяют фазу на 180°) и снова измеряют полную вибрацию. Полученный результат не должен отличаться от предыдущего более чем на 2 %.
При измерениях общей вибрации частотные коррекции, используемые для измерений вибрации в направлениях х, у и z, а также коэффициенты k, применяемые для измерений по каждой из осей, зависят от назначения измерений - будут ли они использованы для оценки влияния вибрации на состояние здоровья, комфорт или для проверки чувствительности к вибрации. Для получения расчетных значений полной вибрации следует использовать ИСО 2631-1.
13.16 Протокол испытаний
В протоколе испытаний должны быть подробно отражены следующие сведения: конфигурации средства измерений, его положение в пространстве во время испытаний, условия испытаний, результаты испытаний, включая расширенную неопределенность измерений для данной испытательной лаборатории. В протокол испытаний должен быть включен вывод, удовлетворяет или не удовлетворяет испытуемое средство измерений требованиям настоящего стандарта.
14 Проверка работоспособности на месте
14.1 Общие положения
Контроль на месте применения предназначен для оценки работы средства измерений до и после проведения серии измерений. В этом случае проверяют только основные калибровки средства измерений и его функциональные возможности.
Техническая документация должна содержать инструкцию по проведению поверки на месте применения.
14.2 Предварительный осмотр
В технической документации должен быть определен порядок визуального контроля целости средства измерений. При визуальном контроле обращают внимание:
- на акселерометр, кабель и корпус измерительного блока, которые не должны иметь следов видимых повреждений;
- на надежность всех соединений, включая соединения кабелей с акселерометром и разъемами измерительного блока.
14.3 Коэффициент преобразования
В технической документации должен быть определен способ контроля коэффициента преобразования на месте применения средства измерений. Описание должно включает в себя:
- метод испытания коэффициента преобразования измерительной цепи средства измерений с использованием опорного сигнала вибрации, создаваемого калибратором, на опорной частоте в опорном диапазоне измерений;
- способ индикации достижения предельных регулировок коэффициента преобразования, которые могут быть использованы при нормальном применении прибора (т.е. границ регулировки, при выходе за пределы которых должна появляться индикация о возможном неправильном функционировании средства измерения);
- способ записи результатов калибровки на месте применения средства измерений (включая дату и время проведения калибровки, настройку средства измерений и калибратора, начальное значение коэффициента преобразования и выполненные регулировки).
Приложение
А
(обязательное)
Требования к калибратору, применяемому в полевых условиях испытаний
А.1 Общие положения
Калибратор служит для воспроизведения вибрации с заданными характеристиками. Эту вибрацию, снимаемую датчиком вибрации, используют в целях проверки коэффициента преобразования средства измерений. Калибратор должен иметь гладкую поверхность (вибростол), на которой закрепляют датчик вибрации.
А.2 Технические требования
Калибратор, используемый для контроля средства измерений на месте его применения, должен воспроизводить стационарный синусоидальный сигнал и удовлетворять следующим требованиям:
|
Направление вектора вибрации: |
перпендикулярно к поверхности вибростола. |
|
Коэффициент поперечных составляющих: |
< 10 % в пределах заданного диапазона нагрузок. |
|
Ориентация в пространстве: |
произвольная. |
|
Время установления режима: |
< 10 с (время между включением калибратора и моментом наступления состояния, когда его характеристики соответствуют указанным в технической документации изготовителя и требованиям настоящего стандарта). |
|
Частота: |
калибратор должен возбуждать вибрацию по крайней мере на одной из частот, указанных в таблице А.1. |
|
Амплитуда: |
амплитуда возбуждаемой вибрации должна соответствовать значениям, указанным в таблице А.1. |
Таблица А.1 - Предпочтительные параметры вибрации, возбуждаемой калибратором
|
Тип вибрации |
||||
|
Локальная |
Общая |
Общая низкочастотная |
||
|
Частота, рад/с (Гц) |
500 ± 0,5 % (79,577) |
1000 ± 0,5 % (159,155) |
100 ± 0,5 % (15,915) |
2,5 ± 0,5 % (0,3979) |
|
С.к.з. ускорения, м/с2 |
10 ± 3 % |
10 ± 3 % |
1 ± 3 % |
0,1 ± 3 % |
|
Допустимая нагрузка: |
определяется испытуемым датчиком вибрации, включая, при необходимости, устройства крепления, но не менее 70 г. Минимальная и максимальная нагрузки должны быть указаны в технической документации. |
|
Коэффициент гармоник: |
< 5 % в пределах заданного диапазона нагрузок. |
|
Плоскостность поверхности вибростола: |
достаточная, чтобы коэффициент гармоник, обусловленный деформацией основания датчика, не выходил за пределы установленного допуска. |
|
Монтажное отверстие (с резьбой): |
90° ± 1° (относительно плоскости вибростола). |
|
Магнитное поле рассеяния (переменное) в месте установки датчика вибрации: |
< 1 мТл. |
|
Электромагнитная совместимость: |
согласно испытанию уровня 2 по МЭК 61000-4-3. |
|
Степень защиты от пыли и водяных брызг: |
в зависимости от применения; должна быть определена в технической документации. |
|
Температура воздуха: |
от 0 °С до 40 °С. |
|
Относительная влажность воздуха: |
от 10 % до 90 % без образования конденсата. |
В технических данных калибратора (указанных, например, в сертификате или технической документации) должны быть определены ожидаемые значения корректированного ускорения для всех возможных режимов работы средства измерений и для всех возможных сочетаний частот и амплитуд возбуждаемой калибратором вибрации.
А.3 Поверка калибратора
Поверку калибратора проводят методом сравнения по ИСО 16063-21 (который распространяется также на виброкалибраторы для полевых условий) с использованием эталонного датчика вибрации.
В процессе испытаний эталонный датчик вибрации устанавливают на вибростол калибратора, после чего измеряют среднеквадратичное значение и частоту воспроизводимого им ускорения. Целью испытаний является проверка, соответствуют ли параметры воспроизводимой вибрации значениям, указанным в таблице А.1. Расширенная неопределенность измерений - по ИСО 16063-21, приложение А.
Приложение
В
(обязательное)
Частотная коррекция
Значения функций частотной коррекции и их допуски, приведенные в таблицах В.1 - В.9 и на рисунках В.1 - В.18, рассчитаны в соответствии с таблицами 3 - 5 и формулами (8) - (12).
В качестве основы для расчетов были взяты истинные среднегеометрические частоты третьоктавных полос fc, Гц, определяемые формулой
fc(n) = 10n/10, (B.1)
где п - номер полосы частот в соответствии с [4].
Для идентификации третьоктавных полос часто используют номинальные значения среднегеометрических частот, которые, однако, не следует использовать для точных вычислений.
Примечание - В некоторых стандартах функция частотной коррекции табулирована для номинальных значений среднегеометрических частот третьоктавных полос. Это может привести к расхождению в значениях функции частотной коррекции с теми, что рассчитаны на основе истинных значений.
Табулированные в настоящем приложении функции частотной коррекции [см. уравнение (12)] включают в себя полосовую фильтрацию. Приведенные границы допусков справедливы как для частотных характеристик полосовых фильтров, так и для функции частотной коррекции в целом.
Примечание - В настоящем приложении значения функции частотной коррекции, ее фазы и истинные среднегеометрические значения частот третьоктавных полос представлены с точностью до четырех значащих цифр для абсолютных значений и с точностью до двух цифр после запятой для относительных значений (в дБ). Это не следует трактовать как точность, требуемую от средства измерений.
Таблица В.1 - Функция частотной коррекции Wb для общей вибрации в вертикальном направлении (ось z), воздействующей на человека в положении сидя, стоя или лежа (на основе ИСО 2631-4)
|
Среднегеометрическая частота, Гц |
Характеристика полосового фильтра |
Функция частотной коррекции Wb |
Допуск |
||||||||
|
Номинальная |
Истинная |
Модуль |
дБ |
Фаза, ...° |
Модуль |
дБ |
Фаза, ...° |
Модуль, % |
дБ |
Dj0, ...° |
|
|
-10 |
0,1 |
0,1000 |
0,06238 |
-24,10 |
159,3 |
0,02494 |
-32,06 |
160,0 |
+26/-100 |
+2/-¥ |
+¥/-¥ |
|
-9 |
0,125 |
0,1259 |
0,09857 |
-20,12 |
153,6 |
0,03941 |
-28,09 |
154,5 |
+26/-100 |
+2/-¥ |
+¥/-¥ |
|
-8 |
0,16 |
0,1585 |
0,1551 |
-16,19 |
146,3 |
0,06198 |
-24,15 |
147,4 |
+26/-100 |
+2/-¥ |
+¥/-¥ |
|
-7 |
0,2 |
0,1995 |
0,2415 |
-12,34 |
136,6 |
0,09645 |
-20,31 |
138,1 |
+26/-100 |
+2/-¥ |
+¥/-¥ |
|
-6 |
0,25 |
0,2512 |
0,3669 |
-8,71 |
124,1 |
0,1464 |
-16,69 |
126,0 |
+26/-100 |
+2/-¥ |
+¥/-¥ |
|
-5 |
0,315 |
0,3162 |
0,5300 |
-5,51 |
108,3 |
0,2113 |
-13,50 |
110,7 |
+26/-21 |
+2/-2 |
+12/-12 |
|
-4 |
0,4 |
0,3981 |
0,7037 |
-3,05 |
90,06 |
0,2800 |
-11,06 |
93,14 |
+26/-21 |
+2/-2 |
+12/-12 |
|
-3 |
0,5 |
0,5012 |
0,8434 |
-1,48 |
71,76 |
0,3347 |
-9,51 |
75,73 |
+26/-21 |
+2/-2 |
+12/-12 |
|
-2 |
0,63 |
0,6310 |
0,9279 |
-0,65 |
55,78 |
0,3666 |
-8,72 |
60,94 |
+12/-11 |
+1/-1 |
+6/-6 |
|
-1 |
0,8 |
0,7943 |
0,9693 |
-0,27 |
43,01 |
0,3808 |
-8,39 |
49,84 |
+12/-11 |
+1/-1 |
+6/-6 |
|
0 |
1 |
1,000 |
0,9874 |
-0,11 |
33,15 |
0,3853 |
-8,29 |
42,42 |
+12/-11 |
+1/-1 |
+6/-6 |
|
1 |
1,25 |
1,259 |
0,9949 |
-0,04 |
25,54 |
0,3864 |
-8,26 |
38,51 |
+12/-11 |
+1/-1 |
+6/-6 |
|
2 |
1,6 |
1,585 |
0,9980 |
-0,02 |
19,58 |
0,3916 |
-8,14 |
38,27 |
+12/-11 |
+1/-1 |
+6/-6 |
|
3 |
2 |
1,995 |
0,9992 |
-0,01 |
14,84 |
0,4168 |
-7,60 |
41,76 |
+12/-11 |
+1/-1 |
+6/-6 |
|
4 |
2,5 |
2,512 |
0,9997 |
0,00 |
10,97 |
0,4960 |
-6,09 |
46,57 |
+12/-11 |
+1/-1 |
+6/-6 |
|
5 |
3,15 |
3,162 |
0,9999 |
0,00 |
7,740 |
0,6653 |
-3,54 |
45,79 |
+12/-11 |
+1/-1 |
+6/-6 |
|
6 |
4 |
3,981 |
0,9999 |
0,00 |
4,941 |
0,8850 |
-1,06 |
34,64 |
+12/-11 |
+1/-1 |
+6/-6 |
|
7 |
5 |
5,012 |
1,0000 |
0,00 |
2,416 |
1,026 |
0,22 |
17,75 |
+12/-11 |
+1/-1 |
+6/-6 |
|
8 |
6,3 |
6,310 |
1,0000 |
0,00 |
0,0244 |
1,054 |
0,46 |
1,770 |
+12/-11 |
+1/-1 |
+6/-6 |
|
9 |
8 |
7,943 |
1,0000 |
0,00 |
-2,366 |
1,026 |
0,23 |
-11,94 |
+12/-11 |
+1/-1 |
+6/-6 |
|
10 |
10 |
10,00 |
0,9999 |
0,00 |
-4,887 |
0,9745 |
-0,22 |
-24,56 |
+12/-11 |
+1/-1 |
+6/-6 |
|
11 |
12,5 |
12,59 |
0,9999 |
0,00 |
-7,679 |
0,9042 |
-0,87 |
-37,10 |
+12/-11 |
+1/-1 |
+6/-6 |
|
12 |
16 |
15,85 |
0,9997 |
0,00 |
-10,90 |
0,8144 |
-1,78 |
-49,93 |
+12/-11 |
+1/-1 |
+6/-6 |
|
13 |
20 |
19,95 |
0,9992 |
-0,01 |
-14,75 |
0,7088 |
-2,99 |
-62,89 |
+12/-11 |
+1/-1 |
+6/-6 |
|
14 |
25 |
25,12 |
0,9980 |
-0,02 |
-19,47 |
0,5973 |
-4,48 |
-75,75 |
+12/-11 |
+1/-1 |
+6/-6 |
|
15 |
31,5 |
31,62 |
0,9950 |
-0,04 |
-25,40 |
0,4906 |
-6,18 |
-88,55 |
+12/-11 |
+1/-1 |
+6/-6 |
|
16 |
40 |
39,81 |
0,9877 |
-0,11 |
-32,97 |
0,3950 |
-8,07 |
-101,7 |
+12/-11 |
+1/-1 |
+6/-6 |
|
17 |
50 |
50,12 |
0,9699 |
-0,27 |
-42,78 |
0,3118 |
-10,12 |
-116,0 |
+12/-11 |
+1/-1 |
+6/-6 |
|
18 |
63 |
63,10 |
0,9291 |
-0,64 |
-55,49 |
0,2389 |
-12,44 |
-132,2 |
+12/-11 |
+1/-1 |
+6/-6 |
|
19 |
80 |
79,43 |
0,8457 |
-1,46 |
-71,41 |
0,1734 |
-15,22 |
-150,9 |
+26/-21 |
+2/-2 |
+12/-12 |
|
20 |
100 |
100,0 |
0,7071 |
-3,01 |
-89,68 |
0,1154 |
-18,75 |
-171,3 |
+26/-21 |
+2/-2 |
+12/-12 |
|
21 |
125 |
125,9 |
0,5336 |
-5,46 |
-107,9 |
0,06929 |
-23,19 |
-191,3 |
+26/-21 |
+2/-2 |
+12/-12 |
|
22 |
160 |
158,5 |
0,3699 |
-8,64 |
-123,8 |
0,03818 |
-28,36 |
-208,5 |
+26/-100 |
+2/-¥ |
+¥/-¥ |
|
23 |
200 |
199,5 |
0,2436 |
-12,27 |
-136,4 |
0,01999 |
-33,98 |
-222,2 |
+26/-100 |
+2/-¥ |
+¥/-¥ |
|
24 |
250 |
251,2 |
0,1565 |
-16,11 |
-146,1 |
0,01020 |
-39,82 |
-232,8 |
+26/-100 |
+2/-¥ |
+¥/-¥ |
|
25 |
315 |
316,2 |
0,09950 |
-20,04 |
-153,5 |
0,005154 |
-45,76 |
-240,8 |
+26/-100 |
+2/-¥ |
+¥/-¥ |
|
26 |
400 |
398,1 |
0,06297 |
-24,02 |
-159,2 |
0,002591 |
-51,73 |
-247,1 |
+26/-100 |
+2/-¥ |
+¥/-¥ |

X - частота, Гц; Y - весовой коэффициент; 1 - полосовой фильтр; 2 - функция частотной коррекции
Рисунок В.1 - Модуль функции частотной коррекции Wb

X - частота, Гц; Y - фаза, ...°; 1 - полосовой фильтр; 2 - функция частотной коррекции
Рисунок В.2 - Фаза функции частотной коррекции Wb
Таблица В.2 - Функция частотной коррекции Wc для общей вибрации в горизонтальном направлении (ось х), воздействующей на человека в положении сидя, спинка сиденья (на основе ИСО 2631-1)
|
Среднегеометрическая частота, Гц |
Характеристика полосового фильтра |
Функция частотной коррекции Wc |
Допуск |
||||||||
|
Номинальная |
Истинная |
Модуль |
дБ |
Фаза, ...° |
Модуль |
дБ |
Фаза, ...° |
Модуль, % |
дБ |
Dj0, ...° |
|
|
-10 |
0,1 |
0,1000 |
0,06238 |
-24,10 |
159,3 |
0,06238 |
-24,10 |
158,8 |
+26/-100 |
+2/-¥ |
+¥/-¥ |
|
-9 |
0,125 |
0,1259 |
0,09857 |
-20,12 |
153,6 |
0,09858 |
-20,12 |
153,1 |
+26/-100 |
+2/-¥ |
+¥/-¥ |
|
-8 |
0,16 |
0,1585 |
0,1551 |
-16,19 |
146,3 |
0,1551 |
-16,19 |
145,6 |
+26/-100 |
+2/-¥ |
+¥/-¥ |
|
-7 |
0,2 |
0,1995 |
0,2415 |
-12,34 |
136,6 |
0,2415 |
-12,34 |
135,8 |
+26/-100 |
+2/-¥ |
+¥/-¥ |
|
-6 |
0,25 |
0,2512 |
0,3669 |
-8,71 |
124,1 |
0,3669 |
-8,71 |
123,0 |
+26/-100 |
+2/-¥ |
+¥/-¥ |
|
-5 |
0,315 |
0,3162 |
0,5300 |
-5,51 |
108,3 |
0,5302 |
-5,51 |
107,0 |
+26/-21 |
+2/-2 |
+12/-12 |
|
-4 |
0,4 |
0,3981 |
0,7037 |
-3,05 |
90,06 |
0,7042 |
-3,05 |
88,38 |
+26/-21 |
+2/-2 |
+12/-12 |
|
-3 |
0,5 |
0,5012 |
0,8434 |
-1,48 |
71,76 |
0,8442 |
-1,47 |
69,65 |
+26/-21 |
+2/-2 |
+12/-12 |
|
-2 |
0,63 |
0,6310 |
0,9279 |
-0,65 |
55,78 |
0,9292 |
-0,64 |
53,11 |
+12/-11 |
+1/-1 |
+6/-6 |
|
-1 |
0,8 |
0,7943 |
0,9693 |
-0,27 |
43,01 |
0,9716 |
-0,25 |
39,64 |
+12/-11 |
+1/-1 |
+6/-6 |
|
0 |
1 |
1,000 |
0,9874 |
-0,11 |
33,15 |
0,9910 |
-0,08 |
28,88 |
+12/-11 |
+1/-1 |
+6/-6 |
|
1 |
1,25 |
1,259 |
0,9949 |
-0,04 |
25,54 |
1,000 |
0,00 |
20,11 |
+12/-11 |
+1/-1 |
+6/-6 |
|
2 |
1,6 |
1,585 |
0,9980 |
-0,02 |
19,58 |
1,006 |
0,06 |
12,66 |
+12/-11 |
+1/-1 |
+6/-6 |
|
3 |
2 |
1,995 |
0,9992 |
-0,01 |
14,84 |
1,012 |
0,10 |
5,957 |
+12/-11 |
+1/-1 |
+6/-6 |
|
4 |
2,5 |
2,512 |
0,9997 |
0,00 |
10,97 |
1,017 |
0,15 |
-0,5318 |
+12/-11 |
+1/-1 |
+6/-6 |
|
5 |
3,15 |
3,162 |
0,9999 |
0,00 |
7,740 |
1,023 |
0,19 |
-7,327 |
+12/-11 |
+1/-1 |
+6/-6 |
|
6 |
4 |
3,981 |
0,9999 |
0,00 |
4,941 |
1,024 |
0,21 |
-15,00 |
+12/-11 |
+1/-1 |
+6/-6 |
|
7 |
5 |
5,012 |
1,0000 |
0,00 |
2,416 |
1,013 |
0,11 |
-24,10 |
+12/-11 |
+1/-1 |
+6/-6 |
|
8 |
6,3 |
6,310 |
1,0000 |
0,00 |
0,0244 |
0,9739 |
-0,23 |
-34,91 |
+12/-11 |
+1/-1 |
+6/-6 |
|
9 |
8 |
7,943 |
1,0000 |
0,00 |
-2,366 |
0,8941 |
-0,97 |
-47,06 |
+12/-11 |
+1/-1 |
+6/-6 |
|
10 |
10 |
10,00 |
0,9999 |
0,00 |
-4,887 |
0,7762 |
-2,20 |
-59,37 |
+12/-11 |
+1/-1 |
+6/-6 |
|
11 |
12,5 |
12,59 |
0,9999 |
0,00 |
-7,679 |
0,6425 |
-3,84 |
-70,70 |
+12/-11 |
+1/-1 |
+6/-6 |
|
12 |
16 |
15,85 |
0,9997 |
0,00 |
-10,90 |
0,5166 |
-5,74 |
-80,61 |
+12/-11 |
+1/-1 |
+6/-6 |
|
13 |
20 |
19,95 |
0,9992 |
-0,01 |
-14,75 |
0,4098 |
-7,75 |
-89,43 |
+12/-11 |
+1/-1 |
+6/-6 |
|
14 |
25 |
25,12 |
0,9980 |
-0,02 |
-19,47 |
0,3236 |
-9,80 |
-97,78 |
+12/-11 |
+1/-1 |
+6/-6 |
|
15 |
31,5 |
31,62 |
0,9950 |
-0,04 |
-25,40 |
0,2549 |
-11,87 |
-106,4 |
+12/-11 |
+1/-1 |
+6/-6 |
|
16 |
40 |
39,81 |
0,9877 |
-0,11 |
-32,97 |
0,2002 |
-13,97 |
-115,9 |
+12/-11 |
+1/-1 |
+6/-6 |
|
17 |
50 |
50,12 |
0,9699 |
-0,27 |
-42,78 |
0,1557 |
-16,15 |
-127,3 |
+12/-11 |
+1/-1 |
+6/-6 |
|
18 |
63 |
63,10 |
0,9291 |
-0,64 |
-55,49 |
0,1182 |
-18,55 |
-141,2 |
+12/-11 |
+1/-1 |
+6/-6 |
|
19 |
80 |
79,43 |
0,8457 |
-1,46 |
-71,41 |
0,08538 |
-21,37 |
-158,0 |
+26/-21 |
+2/-2 |
+12/-12 |
|
20 |
100 |
100,0 |
0,7071 |
-3,01 |
-89,68 |
0,05665 |
-24,94 |
-177,0 |
+26/-21 |
+2/-2 |
+12/-12 |
|
21 |
125 |
125,9 |
0,5336 |
-5,46 |
-107,9 |
0,03394 |
-29,39 |
-195,8 |
+26/-21 |
+2/-2 |
+12/-12 |
|
22 |
160 |
158,5 |
0,3699 |
-8,64 |
-123,8 |
0,01868 |
-34,57 |
-212,1 |
+26/-100 |
+2/-¥ |
+¥/-¥ |
|
23 |
200 |
199,5 |
0,2436 |
-12,27 |
-136,4 |
0,009772 |
-40,20 |
-225,1 |
+26/-100 |
+2/-¥ |
+¥/-¥ |
|
24 |
250 |
251,2 |
0,1565 |
-16,11 |
-146,1 |
0,004987 |
-46,04 |
-235,0 |
+26/-100 |
+2/-¥ |
+¥/-¥ |
|
25 |
315 |
316,2 |
0,09950 |
-20,04 |
-153,5 |
0,002518 |
-51,98 |
-242,6 |
+26/-100 |
+2/-¥ |
+¥/-¥ |
|
26 |
400 |
398,1 |
0,06297 |
-24,02 |
-159,2 |
0,001266 |
-57,95 |
-248,5 |
+26/-100 |
+2/-¥ |
+¥/-¥ |

X - частота, Гц; Y - весовой коэффициент; 1 - полосовой фильтр; 2 - функция частотной коррекции
Рисунок В.3 - Модуль функции частотной коррекции Wc

X - частота, Гц; Y - фаза, ...°; 1 - полосовой фильтр; 2 - функция частотной коррекции
Рисунок В.4 - Фаза функции частотной коррекции Wc
Таблица В.3 - Функция частотной коррекции Wd для общей вибрации в горизонтальном направлении (ось х или у), воздействующей на человека в положении сидя, стоя или лежа (на основе ИСО 2631-1)
|
Среднегеометрическая частота, Гц |
Характеристика полосового фильтра |
Функция частотной коррекции Wd |
Допуск |
||||||||
|
Номинальная |
Истинная |
Модуль |
дБ |
Фаза, ...° |
Модуль |
дБ |
Фаза, ...° |
Модуль, % |
дБ |
Dj0, ...° |
|
|
-10 |
0,1 |
0,1000 |
0,06238 |
-24,10 |
159,3 |
0,06242 |
-24,09 |
157,6 |
+26/-100 |
+2/-¥ |
+¥/-¥ |
|
-9 |
0,125 |
0,1259 |
0,09857 |
-20,12 |
153,6 |
0,09867 |
-20,12 |
151,5 |
+26/-100 |
+2/-¥ |
+¥/-¥ |
|
-8 |
0,16 |
0,1585 |
0,1551 |
-16,19 |
146,3 |
0,1553 |
-16,18 |
143,6 |
+26/-100 |
+2/-¥ |
+¥/-¥ |
|
-7 |
0,2 |
0,1995 |
0,2415 |
-12,34 |
136,6 |
0,2420 |
-12,32 |
133,2 |
+26/-100 |
+2/-¥ |
+¥/-¥ |
|
-6 |
0,25 |
0,2512 |
0,3669 |
-8,71 |
124,1 |
0,3862 |
-8,68 |
119,8 |
+26/-100 |
+2/-¥ |
+¥/-¥ |
|
-5 |
0,315 |
0,3162 |
0,5300 |
-5,51 |
108,3 |
0,5330 |
-5,47 |
102,8 |
+26/-21 |
+2/-2 |
+12/-12 |
|
-4 |
0,4 |
0,3981 |
0,7037 |
-3,05 |
90,06 |
0,7097 |
-2,98 |
83,11 |
+26/-21 |
+2/-2 |
+12/-12 |
|
-3 |
0,5 |
0,5012 |
0,8434 |
-1,48 |
71,76 |
0,8540 |
-1,37 |
62,84 |
+26/-21 |
+2/-2 |
+12/-12 |
|
-2 |
0,63 |
0,6310 |
0,9279 |
-0,65 |
55,78 |
0,9443 |
-0,50 |
44,21 |
+12/-11 |
+1/-1 |
+6/-6 |
|
-1 |
0,8 |
0,7943 |
0,9693 |
-0,27 |
43,01 |
0,9914 |
-0,08 |
27,86 |
+12/-11 |
+1/-1 |
+6/-6 |
|
0 |
1 |
1,000 |
0,9874 |
-0,11 |
33,15 |
1,011 |
0,10 |
13,09 |
+12/-11 |
+1/-1 |
+6/-6 |
|
1 |
1,25 |
1,259 |
0,9949 |
-0,04 |
25,54 |
1,007 |
0,06 |
-1,131 |
+12/-11 |
+1/-1 |
+6/-6 |
|
2 |
1,6 |
1,585 |
0,9980 |
-0,02 |
19,58 |
0,9707 |
-0,26 |
-15,55 |
+12/-11 |
+1/-1 |
+6/-6 |
|
3 |
2 |
1,995 |
0,9992 |
-0,01 |
14,84 |
0,8913 |
-1,00 |
-30,06 |
+12/-11 |
+1/-1 |
+6/-6 |
|
4 |
2,5 |
2,512 |
0,9997 |
0,00 |
10,97 |
0,7733 |
-2,23 |
-43,71 |
+12/-11 |
+1/-1 |
+6/-6 |
|
5 |
3,15 |
3,162 |
0,9999 |
0,00 |
7,740 |
0,6398 |
-3,88 |
-55,44 |
+12/-11 |
+1/-1 |
+6/-6 |
|
6 |
4 |
3,981 |
0,9999 |
0,00 |
4,941 |
0,5143 |
-5,78 |
-64,89 |
+12/-11 |
+1/-1 |
+6/-6 |
|
7 |
5 |
5,012 |
1,0000 |
0,00 |
2,416 |
0,4081 |
-7,78 |
-72,34 |
+12/-11 |
+1/-1 |
+6/-6 |
|
8 |
6,3 |
6,310 |
1,0000 |
0,00 |
0,0244 |
0,3226 |
-9,83 |
-78,34 |
+12/-11 |
+1/-1 |
+6/-6 |
|
9 |
8 |
7,943 |
1,0000 |
0,00 |
-2,366 |
0,2550 |
-11,87 |
-83,39 |
+12/-11 |
+1/-1 |
+6/-6 |
|
10 |
10 |
10,00 |
0,9999 |
0,00 |
-4,887 |
0,2017 |
-13,91 |
-87,90 |
+12/-11 |
+1/-1 |
+6/-6 |
|
11 |
12,5 |
12,59 |
0,9999 |
0,00 |
-7,679 |
0,1597 |
-15,93 |
-92,20 |
+12/-11 |
+1/-1 |
+6/-6 |
|
12 |
16 |
15,85 |
0,9997 |
0,00 |
-10,90 |
0,1266 |
-17,95 |
-96,59 |
+12/-11 |
+1/-1 |
+6/-6 |
|
13 |
20 |
19,95 |
0,9992 |
-0,01 |
-14,75 |
0,1004 |
-19,97 |
-101,3 |
+12/-11 |
+1/-1 |
+6/-6 |
|
14 |
25 |
25,12 |
0,9980 |
-0,02 |
-19,47 |
0,07958 |
-21,98 |
-106,8 |
+12/-11 |
+1/-1 |
+6/-6 |
|
15 |
31,5 |
31,62 |
0,9950 |
-0,04 |
-25,40 |
0,06299 |
-24,01 |
-113,3 |
+12/-11 |
+1/-1 |
+6/-6 |
|
16 |
40 |
39,81 |
0,9877 |
-0,11 |
-32,97 |
0,04965 |
-26,08 |
-121,3 |
+12/-11 |
+1/-1 |
+6/-6 |
|
17 |
50 |
50,12 |
0,9699 |
-0,27 |
-42,78 |
0,03872 |
-28,24 |
-131,4 |
+12/-11 |
+1/-1 |
+6/-6 |
|
18 |
63 |
63,10 |
0,9291 |
-0,64 |
-55,49 |
0,02946 |
-30,62 |
-144,4 |
+12/-11 |
+1/-1 |
+6/-6 |
|
19 |
80 |
79,43 |
0,8457 |
-1,46 |
-71,41 |
0,02130 |
-33,43 |
-160,6 |
+26/-21 |
+2/-2 |
+12/-12 |
|
20 |
100 |
100,0 |
0,7071 |
-3,01 |
-89,68 |
0,01414 |
-36,99 |
-179,0 |
+26/-21 |
+2/-2 |
+12/-12 |
|
21 |
125 |
125,9 |
0,5336 |
-5,46 |
-107,9 |
0,008478 |
-41,43 |
-197,4 |
+26/-21 |
+2/-2 |
+12/-12 |
|
22 |
160 |
158,5 |
0,3699 |
-8,64 |
-123,8 |
0,004668 |
-46,62 |
-213,4 |
+26/-100 |
+2/-¥ |
+¥/-¥ |
|
23 |
200 |
199,5 |
0,2436 |
-12,27 |
-136,4 |
0,002442 |
-52,24 |
-226,1 |
+26/-100 |
+2/-¥ |
+¥/-¥ |
|
24 |
250 |
251,2 |
0,1565 |
-16,11 |
-146,1 |
0,001246 |
-58,09 |
-235,8 |
+26/-100 |
+2/-¥ |
+¥/-¥ |
|
25 |
315 |
316,2 |
0,09950 |
-20,04 |
-153,5 |
0,000629 |
-64,02 |
-243,3 |
+26/-100 |
+2/-¥ |
+¥/-¥ |
|
26 |
400 |
398,1 |
0,06297 |
-24,02 |
-159,2 |
0,000316 |
-70,00 |
-249,0 |
+26/-100 |
+2/-¥ |
+¥/-¥ |

X - частота, Гц; Y - весовой коэффициент; 1 - полосовой фильтр; 2 - функция частотной коррекции
Рисунок В.5 - Модуль функции частотной коррекции Wd
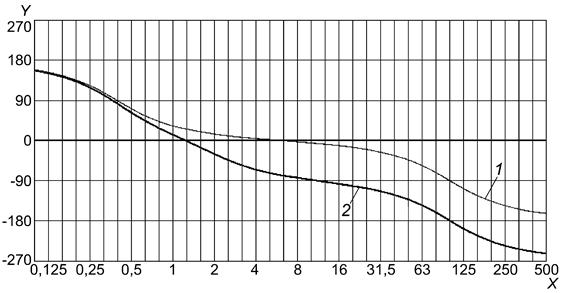
X - частота, Гц; Y - фаза, ...°; 1 - полосовой фильтр; 2 - функция частотной коррекции
Рисунок В.6 - Фаза функции частотной коррекции Wd
Таблица В.4 - Функция частотной коррекции We для общей угловой вибрации во всех направлениях, воздействующей на человека в положении сидя (на основе ИСО 2631-1)
|
Среднегеометрическая частота, Гц |
Характеристика полосового фильтра |
Функция частотной коррекции We |
Допуск |
||||||||
|
Номинальная |
Истинная |
Модуль |
дБ |
Фаза, ...° |
Модуль |
дБ |
Фаза, ...° |
Модуль, % |
дБ |
Dj0, ...° |
|
|
-10 |
0,1 |
0,1000 |
0,06238 |
-24,10 |
159,3 |
0,06252 |
-24,08 |
155,9 |
+26/-100 |
+2/-¥ |
+¥/-¥ |
|
-9 |
0,125 |
0,1259 |
0,09857 |
-20,12 |
153,6 |
0,09893 |
-20,09 |
149,3 |
+26/-100 |
+2/-¥ |
+¥/-¥ |
|
-8 |
0,16 |
0,1585 |
0,1551 |
-16,19 |
146,3 |
0,1560 |
-16,14 |
140,8 |
+26/-100 |
+2/-¥ |
+¥/-¥ |
|
-7 |
0,2 |
0,1995 |
0,2415 |
-12,34 |
136,6 |
0,2435 |
-12,27 |
129,7 |
+26/-100 |
+2/-¥ |
+¥/-¥ |
|
-6 |
0,25 |
0,2512 |
0,3669 |
-8,71 |
124,1 |
0,3715 |
-8,60 |
115,1 |
+26/-100 |
+2/-¥ |
+¥/-¥ |
|
-5 |
0,315 |
0,3162 |
0,5300 |
-5,51 |
108,3 |
0,5394 |
-5,36 |
96,68 |
+26/-21 |
+2/-2 |
+12/-12 |
|
-4 |
0,4 |
0,3981 |
0,7037 |
-3,05 |
90,06 |
0,7198 |
-2,86 |
74,87 |
+26/-21 |
+2/-2 |
+12/-12 |
|
-3 |
0,5 |
0,5012 |
0,8434 |
-1,48 |
71,76 |
0,8635 |
-1,27 |
51,65 |
+26/-21 |
+2/-2 |
+12/-12 |
|
-2 |
0,63 |
0,6310 |
0,9279 |
-0,65 |
55,78 |
0,9389 |
-0,55 |
29,04 |
+12/-11 |
+1/-1 |
+6/-6 |
|
-1 |
0,8 |
0,7943 |
0,9693 |
-0,27 |
43,01 |
0,9423 |
-0,52 |
7,786 |
+12/-11 |
+1/-1 |
+6/-6 |
|
0 |
1 |
1,000 |
0,9874 |
-0,11 |
33,15 |
0,8798 |
-1,11 |
-11,85 |
+12/-11 |
+1/-1 |
+6/-6 |
|
1 |
1,25 |
1,259 |
0,9949 |
-0,04 |
25,54 |
0,7683 |
-2,29 |
-29,24 |
+12/-11 |
+1/-1 |
+6/-6 |
|
2 |
1,6 |
1,585 |
0,9980 |
-0,02 |
19,58 |
0,6372 |
-3,91 |
-43,67 |
+12/-11 |
+1/-1 |
+6/-6 |
|
3 |
2 |
1,995 |
0,9992 |
-0,01 |
14,84 |
0,5127 |
-5,80 |
-55,05 |
+12/-11 |
+1/-1 |
+6/-6 |
|
4 |
2,5 |
2,512 |
0,9997 |
0,00 |
10,97 |
0,4070 |
-7,81 |
-63,83 |
+12/-11 |
+1/-1 |
+6/-6 |
|
5 |
3,15 |
3,162 |
0,9999 |
0,00 |
7,740 |
0,3218 |
-9,85 |
-70,66 |
+12/-11 |
+1/-1 |
+6/-6 |
|
6 |
4 |
3,981 |
0,9999 |
0,00 |
4,941 |
0,2543 |
-11,89 |
-76,11 |
+12/-11 |
+1/-1 |
+6/-6 |
|
7 |
5 |
5,012 |
1,0000 |
0,00 |
2,416 |
0,2012 |
-13,93 |
-80,61 |
+12/-11 |
+1/-1 |
+6/-6 |
|
8 |
6,3 |
6,310 |
1,0000 |
0,00 |
0,0244 |
0,1594 |
-15,95 |
-84,51 |
+12/-11 |
+1/-1 |
+6/-6 |
|
9 |
8 |
7,943 |
1,0000 |
0,00 |
-2,366 |
0,1263 |
-17,97 |
-88,06 |
+12/-11 |
+1/-1 |
+6/-6 |
|
10 |
10 |
10,00 |
0,9999 |
0,00 |
-4,887 |
0,1002 |
-19,98 |
-91,49 |
+12/-11 |
+1/-1 |
+6/-6 |
|
11 |
12,5 |
12,59 |
0,9999 |
0,00 |
-7,679 |
0,07954 |
-21,99 |
-94,99 |
+12/-11 |
+1/-1 |
+6/-6 |
|
12 |
16 |
15,85 |
0,9997 |
0,00 |
-10,90 |
0,06314 |
-23,99 |
-98,77 |
+12/-11 |
+1/-1 |
+6/-6 |
|
13 |
20 |
19,95 |
0,9992 |
-0,01 |
-14,75 |
0,05011 |
-26,00 |
-103,1 |
+12/-11 |
+1/-1 |
+6/-6 |
|
14 |
25 |
25,12 |
0,9980 |
-0,02 |
-19,47 |
0,03975 |
-28,01 |
-108,1 |
+12/-11 |
+1/-1 |
+6/-6 |
|
15 |
31,5 |
31,62 |
0,9950 |
-0,04 |
-25,40 |
0,03147 |
-30,04 |
-114,3 |
+12/-11 |
+1/-1 |
+6/-6 |
|
16 |
40 |
39,81 |
0,9877 |
-0,11 |
-32,97 |
0,02481 |
-32,11 |
-122,1 |
+12/-11 |
+1/-1 |
+6/-6 |
|
17 |
50 |
50,12 |
0,9699 |
-0,27 |
-42,78 |
0,01935 |
-34,26 |
-132,1 |
+12/-11 |
+1/-1 |
+6/-6 |
|
18 |
63 |
63,10 |
0,9291 |
-0,64 |
-55,49 |
0,01473 |
-36,64 |
-145,0 |
+12/-11 |
+1/-1 |
+6/-6 |
|
19 |
80 |
79,43 |
0,8457 |
-1,46 |
-71,41 |
0,01065 |
-39,46 |
-161,0 |
+26/-21 |
+2/-2 |
+12/-12 |
|
20 |
100 |
100,0 |
0,7071 |
-3,01 |
-89,68 |
0,007071 |
-43,01 |
-179,3 |
+26/-21 |
+2/-2 |
+12/-12 |
|
21 |
125 |
125,9 |
0,5336 |
-5,46 |
-107,9 |
0,004239 |
-47,46 |
-197,7 |
+26/-21 |
+2/-2 |
+12/-12 |
|
22 |
160 |
158,5 |
0,3699 |
-8,64 |
-123,8 |
0,002334 |
-52,64 |
-213,6 |
+26/-100 |
+2/-¥ |
+¥/-¥ |
|
23 |
200 |
199,5 |
0,2436 |
-12,27 |
-136,4 |
0,001221 |
-58,27 |
-226,2 |
+26/-100 |
+2/-¥ |
+¥/-¥ |
|
24 |
250 |
251,2 |
0,1565 |
-16,11 |
-146,1 |
0,0006232 |
-64,11 |
-236,0 |
+26/-100 |
+2/-¥ |
+¥/-¥ |
|
25 |
315 |
316,2 |
0,09950 |
-20,04 |
-153,5 |
0,0003147 |
-70,04 |
-243,4 |
+26/-100 |
+2/-¥ |
+¥/-¥ |
|
26 |
400 |
398,1 |
0,06297 |
-24,02 |
-159,2 |
0,0001528 |
-76,02 |
-249,1 |
+26/-100 |
+2/-¥ |
+¥/-¥ |

X - частота, Гц; Y - весовой коэффициент; 1 - полосовой фильтр; 2 - функция частотной коррекции
Рисунок В.7 - Модуль функции частотной коррекции We
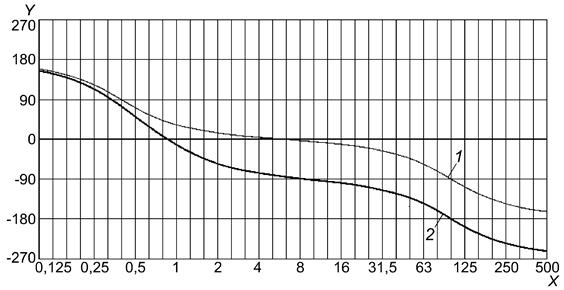
X - частота, Гц; Y - фаза, ...°; 1 - полосовой фильтр; 2 - функция частотной коррекции
Рисунок В.8 - Фаза функции частотной коррекции We
Таблица В.5 - Функция частотной коррекции Wf для общей низкочастотной вибрации в вертикальном направлении (ось z), воздействующей на человека в положении сидя или стоя (на основе ИСО 2631-1)
|
Среднегеометрическая частота, Гц |
Характеристика полосового фильтра |
Функция частотной коррекции Wf |
Допуск |
||||||||
|
Номинальная |
Истинная |
Модуль |
дБ |
Фаза, ...° |
Модуль |
дБ |
Фаза, ...° |
Модуль, % |
дБ |
Dj0, ...° |
|
|
-17 |
0,02 |
0,01995 |
0,06208 |
-24,14 |
156,8 |
0,02407 |
-32,37 |
160,9 |
+26/-100 |
+2/-¥ |
+¥/-¥ |
|
-16 |
0,025 |
0,02512 |
0,09811 |
-20,17 |
150,5 |
0,03803 |
-28,40 |
156,2 |
+26/-100 |
+2/-¥ |
+¥/-¥ |
|
-15 |
0,0315 |
0,03162 |
0,1544 |
-16,23 |
142,4 |
0,06021 |
-24,41 |
150,6 |
+26/-100 |
+2/-¥ |
+¥/-¥ |
|
-14 |
0,04 |
0,03981 |
0,2404 |
-12,38 |
131,8 |
0,09619 |
-20,34 |
143,7 |
+26/-100 |
+2/-¥ |
+¥/-¥ |
|
-13 |
0,05 |
0,05012 |
0,3653 |
-8,75 |
118,0 |
0,1575 |
-16,06 |
134,8 |
+26/-100 |
+2/-¥ |
+¥/-¥ |
|
-12 |
0,063 |
0,06310 |
0,5282 |
-5,54 |
100,6 |
0,2675 |
-11,45 |
121,4 |
+26/-21 |
+2/-2 |
+12/-12 |
|
-11 |
0,08 |
0,07943 |
0,7020 |
-3,07 |
80,31 |
0,4537 |
-6,86 |
99,53 |
+26/-21 |
+2/-2 |
+12/-12 |
|
-10 |
0,1 |
0,1000 |
0,8420 |
-1,49 |
59,38 |
0,6951 |
-3,16 |
68,36 |
+26/-21 |
+2/-2 |
+12/-12 |
|
-9 |
0,125 |
0,1259 |
0,9265 |
-0,66 |
40,04 |
0,9000 |
-0,92 |
32,06 |
+12/-11 |
+1/-1 |
+6/-6 |
|
-8 |
0,16 |
0,1585 |
0,9671 |
-0,29 |
22,97 |
1,004 |
0,04 |
-5,596 |
+12/-11 |
+1/-1 |
+6/-6 |
|
-7 |
0,2 |
0,1995 |
0,9824 |
-0,15 |
7,579 |
0,9928 |
-0,06 |
-44,61 |
+12/-11 |
+1/-1 |
+6/-6 |
|
-6 |
0,25 |
0,2512 |
0,9826 |
-0,15 |
-7,217 |
0,8501 |
-1,41 |
-85,43 |
+12/-11 |
+1/-1 |
+6/-6 |
|
-5 |
0,315 |
0,3162 |
0,9677 |
-0,29 |
-22,58 |
0,6149 |
-4,22 |
-125,5 |
+12/-11 |
+1/-1 |
+6/-6 |
|
-4 |
0,4 |
0,3981 |
0,9279 |
-0,65 |
-39,60 |
0,3884 |
-8,22 |
-162,1 |
+12/-11 |
+1/-1 |
+6/-6 |
|
-3 |
0,5 |
0,5012 |
0,8447 |
-1,47 |
-58,89 |
0,2225 |
-13,05 |
-195,6 |
+26/-21 |
+2/-2 |
+12/-12 |
|
-2 |
0,63 |
0,6310 |
0,7059 |
-3,02 |
-79,79 |
0,1157 |
-18,73 |
-226,8 |
+26/-21 |
+2/-2 |
+12/-12 |
|
-1 |
0,8 |
0,7943 |
0,5324 |
-5,47 |
-100,1 |
0,05434 |
-25,30 |
-254,6 |
+26/-21 |
+2/-2 |
+12/-12 |
|
0 |
1 |
1 |
0,3689 |
-8,66 |
-117,6 |
0,02352 |
-32,57 |
-277,7 |
+26/-100 |
+2/-¥ |
+¥/-¥ |
|
1 |
1,25 |
1,259 |
0,2429 |
-12,29 |
-131,5 |
0,00971 |
-40,26 |
-295,8 |
+26/-100 |
+2/-¥ |
+¥/-¥ |
|
2 |
1,6 |
1,585 |
0,1561 |
-16,13 |
-142,2 |
0,00392 |
-48,14 |
-309,8 |
+26/-100 |
+2/-¥ |
+¥/-¥ |
|
3 |
2 |
1,995 |
0,0992 |
-20,07 |
-150,4 |
0,00157 |
-56,11 |
-320,6 |
+26/-100 |
+2/-¥ |
+¥/-¥ |
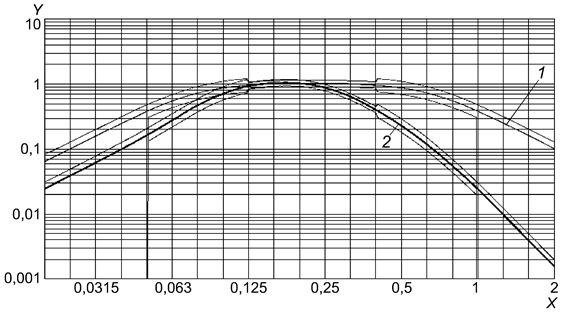
X - частота, Гц; Y - весовой коэффициент; 1 - полосовой фильтр; 2 - функция частотной коррекции
Рисунок В.9 - Модуль функции частотной коррекции Wf

X - частота, Гц; Y - фаза, ...°; 1 - полосовой фильтр; 2 - функция частотной коррекции
Рисунок В.10 - Фаза функции частотной коррекции Wf
Таблица В.6 - Функция частотной коррекции Wh для локальной вибрации во всех направлениях (на основе ИСО 5349-1)
|
Среднегеометрическая частота, Гц |
Характеристика полосового фильтра |
Функция частотной коррекции Wh |
Допуск |
||||||||
|
Номинальная |
Истинная |
Модуль |
дБ |
Фаза, ...° |
Модуль |
дБ |
Фаза, ...° |
Модуль, % |
дБ |
Dj0, ...° |
|
|
-1 |
0,8 |
0,7943 |
0,01585 |
-36,00 |
169,7 |
0,01586 |
-36,00 |
168,1 |
+26/-100 |
+2/-¥ |
+¥/-¥ |
|
0 |
1 |
1,000 |
0,02511 |
-32,00 |
167,0 |
0,02514 |
-31,99 |
165,0 |
+26/-100 |
+2/-¥ |
+¥/-¥ |
|
1 |
1,25 |
1,259 |
0,03978 |
-28,01 |
163,5 |
0,03985 |
-27,99 |
161,0 |
+26/-100 |
+2/-¥ |
+¥/-¥ |
|
2 |
1,6 |
1,585 |
0,06297 |
-24,02 |
159,1 |
0,06314 |
-23,99 |
155,9 |
+26/-100 |
+2/-¥ |
+¥/-¥ |
|
3 |
2 |
1,995 |
0,09950 |
-20,04 |
153,4 |
0,09992 |
-20,01 |
149,3 |
+26/-100 |
+2/-¥ |
+¥/-¥ |
|
4 |
2,5 |
2,512 |
0,1565 |
-16,11 |
146,1 |
0,1576 |
-16,05 |
140,8 |
+26/-100 |
+2/-¥ |
+¥/-¥ |
|
5 |
3,15 |
3,162 |
0,2436 |
-12,27 |
136,4 |
0,2461 |
-12,18 |
129,7 |
+26/-100 |
+2/-¥ |
+¥/-¥ |
|
6 |
4 |
3,981 |
0,3699 |
-8,64 |
123,7 |
0,3754 |
-8,51 |
115,2 |
+26/-100 |
+2/-¥ |
+¥/-¥ |
|
7 |
5 |
5,012 |
0,5336 |
-5,46 |
107,9 |
0,5450 |
-5,27 |
96,70 |
+26/-21 |
+2/-2 |
+12/-12 |
|
8 |
6,3 |
6,310 |
0,7071 |
-3,01 |
89,59 |
0,7272 |
-2,77 |
74,91 |
+26/-21 |
+2/-2 |
+12/-12 |
|
9 |
8 |
7,943 |
0,8457 |
-1,46 |
71,30 |
0,8731 |
-1,18 |
51,74 |
+26/-21 |
+2/-2 |
+12/-12 |
|
10 |
10 |
10,00 |
0,9291 |
-0,64 |
55,36 |
0,9514 |
-0,43 |
29,15 |
+12/-11 |
+1/-1 |
+6/-6 |
|
11 |
12,5 |
12,59 |
0,9699 |
-0,27 |
42,62 |
0,9576 |
-0,38 |
7,810 |
+12/-11 |
+1/-1 |
+6/-6 |
|
12 |
16 |
15,85 |
0,9877 |
-0,11 |
32,76 |
0,8958 |
-0,96 |
-12,05 |
+12/-11 |
+1/-1 |
+6/-6 |
|
13 |
20 |
19,95 |
0,9950 |
-0,04 |
25,14 |
0,7820 |
-2,14 |
-29,71 |
+12/-11 |
+1/-1 |
+6/-6 |
|
14 |
25 |
25,12 |
0,9980 |
-0,02 |
19,15 |
0,6471 |
-3,78 |
4,37 |
+12/-11 |
+1/-1 |
+6/-6 |
|
15 |
31,5 |
31,62 |
0,9992 |
-0,01 |
14,34 |
0,5192 |
-5,69 |
-55,89 |
+12/-11 |
+1/-1 |
+6/-6 |
|
16 |
40 |
39,81 |
0,9997 |
0,00 |
10,38 |
0,4111 |
-7,72 |
-64,78 |
+12/-11 |
+1/-1 |
+6/-6 |
|
17 |
50 |
50,12 |
0,9999 |
0,00 |
7,027 |
0,3244 |
-9,78 |
-71,70 |
+12/-11 |
+1/-1 |
+6/-6 |
|
18 |
63 |
63,10 |
0,9999 |
0,00 |
4,065 |
0,2560 |
-11,83 |
-77,27 |
+12/-11 |
+1/-1 |
+6/-6 |
|
19 |
80 |
79,43 |
1,000 |
0,00 |
1,330 |
0,2024 |
-13,88 |
-81,94 |
+12/-11 |
+1/-1 |
+6/-6 |
|
20 |
100 |
100,0 |
1,000 |
0,00 |
-1,330 |
0,1602 |
-15,91 |
-86,06 |
+12/-11 |
+1/-1 |
+6/-6 |
|
21 |
125 |
125,9 |
0,9999 |
0,00 |
-4,065 |
0,1270 |
-17,93 |
-88,92 |
+12/-11 |
+1/-1 |
+6/-6 |
|
22 |
160 |
158,5 |
0,9999 |
0,00 |
-7,027 |
0,1007 |
-19,94 |
-93,75 |
+12/-11 |
+1/-1 |
+6/-6 |
|
23 |
200 |
199,5 |
0,9997 |
0,00 |
-10,38 |
0,07988 |
-21,95 |
-97,80 |
+12/-11 |
+1/-1 |
+6/-6 |
|
24 |
250 |
251,2 |
0,9992 |
-0,01 |
-14,34 |
0,06338 |
-23,96 |
-102,3 |
+12/-11 |
+1/-1 |
+6/-6 |
|
25 |
315 |
316,2 |
0,9980 |
-0,02 |
-19,15 |
0,05026 |
-25,97 |
-107,5 |
+12/-11 |
+1/-1 |
+6/-6 |
|
26 |
400 |
398,1 |
0,9950 |
-0,04 |
-25,14 |
0,03980 |
-28,00 |
-113,8 |
+12/-11 |
+1/-1 |
+6/-6 |
|
27 |
500 |
501,2 |
0,9877 |
-0,11 |
-32,76 |
0,03137 |
-30,07 |
-121,7 |
+12/-11 |
+1/-1 |
+6/-6 |
|
28 |
630 |
631,0 |
0,9699 |
-0,27 |
-42,62 |
0,02447 |
-32,23 |
-131,8 |
+12/-11 |
+1/-1 |
+6/-6 |
|
29 |
800 |
794,3 |
0,9291 |
-0,64 |
-55,36 |
0,01862 |
-34,60 |
-144,7 |
+12/-11 |
+1/-1 |
+6/-6 |
|
30 |
1000 |
1000 |
0,8457 |
-1,46 |
-71,30 |
0,01346 |
-37,42 |
-160,8 |
+26/-21 |
+2/-2 |
+12/-12 |
|
31 |
1250 |
1259 |
0,7071 |
-3,01 |
-89,59 |
0,008940 |
-40,97 |
-179,2 |
+26/-21 |
+2/-2 |
+12/-12 |
|
32 |
1600 |
1585 |
0,5336 |
-5,46 |
-107,9 |
0,005359 |
-45,42 |
-197,5 |
+26/-21 |
+2/-2 |
+12/-12 |
|
33 |
2000 |
1995 |
0,3699 |
-8,64 |
-123,7 |
0,002950 |
-50,60 |
-213,5 |
+26/-100 |
+2/-¥ |
+¥/-¥ |
|
34 |
2500 |
2512 |
0,2436 |
-12,27 |
-136,4 |
0,001544 |
-56,23 |
-226,2 |
+26/-100 |
+2/-¥ |
+¥/-¥ |
|
35 |
3150 |
3162 |
0,1565 |
-16,11 |
-146,1 |
0,0007878 |
-62,07 |
-235,9 |
+26/-100 |
+2/-¥ |
+¥/-¥ |
|
36 |
4000 |
3981 |
0,09950 |
-20,04 |
-153,4 |
0,0003978 |
-68,01 |
-243,3 |
+26/-100 |
+2/-¥ |
+¥/-¥ |

X - частота, Гц; Y - весовой коэффициент; 1 - полосовой фильтр; 2 - функция частотной коррекции
Рисунок В.11 - Модуль функции частотной коррекции Wh

X - частота, Гц; Y - фаза, ...°; 1 - полосовой фильтр; 2 - функция частотной коррекции
Рисунок В.12 - Фаза функции частотной коррекции Wh
Таблица В.7 - Функция частотной коррекции Wj для вибрации в вертикальном направлении (ось х), воздействующей на голову лежащего человека (на основе ИСО 2631-1)
|
Среднегеометрическая частота, Гц |
Характеристика полосового фильтра |
Функция частотной коррекции Wj |
Допуск |
||||||||
|
Номинальная |
Истинная |
Модуль |
дБ |
Фаза, ...° |
Модуль |
дБ |
Фаза, ...° |
Модуль, % |
дБ |
Dj0, ...° |
|
|
-10 |
0,1 |
0,1000 |
0,06238 |
-24,10 |
159,3 |
0,03099 |
-30,18 |
159,8 |
+26/-100 |
+2/-¥ |
+¥/-¥ |
|
-9 |
0,125 |
0,1259 |
0,09857 |
-20,12 |
153,6 |
0,04897 |
-26,20 |
154,2 |
+26/-100 |
+2/-¥ |
+¥/-¥ |
|
-8 |
0,16 |
0,1585 |
0,1551 |
-16,19 |
146,3 |
0,07703 |
-22,27 |
147,0 |
+26/-100 |
+2/-¥ |
+¥/-¥ |
|
-7 |
0,2 |
0,1995 |
0,2415 |
-12,34 |
136,6 |
0,1199 |
-18,42 |
137,6 |
+26/-100 |
+2/-¥ |
+¥/-¥ |
|
-6 |
0,25 |
0,2512 |
0,3669 |
-8,71 |
124,1 |
0,1821 |
-14,79 |
125,3 |
+26/-100 |
+2/-¥ |
+¥/-¥ |
|
-5 |
0,315 |
0,3162 |
0,5300 |
-5,51 |
108,3 |
0,2630 |
-11,60 |
109,9 |
+26/-21 |
+2/-2 |
+12/-12 |
|
-4 |
0,4 |
0,3981 |
0,7037 |
-3,05 |
90,06 |
0,3489 |
-9,15 |
92,06 |
+26/-21 |
+2/-2 |
+12/-12 |
|
-3 |
0,5 |
0,5012 |
0,8434 |
-1,48 |
71,76 |
0,4176 |
-7,58 |
74,31 |
+26/-21 |
+2/-2 |
+12/-12 |
|
-2 |
0,63 |
0,6310 |
0,9279 |
-0,65 |
55,78 |
0,4585 |
-6,77 |
59,02 |
+12/-11 |
+1/-1 |
+6/-6 |
|
-1 |
0,8 |
0,7943 |
0,9693 |
-0,27 |
43,01 |
0,4776 |
-6,42 |
47,18 |
+12/-11 |
+1/-1 |
+6/-6 |
|
0 |
1 |
1,000 |
0,9874 |
-0,11 |
33,15 |
0,4844 |
-6,30 |
38,57 |
+12/-11 |
+1/-1 |
+6/-6 |
|
1 |
1,25 |
1,259 |
0,9949 |
-0,04 |
25,54 |
0,4851 |
-6,28 |
32,71 |
+12/-11 |
+1/-1 |
+6/-6 |
|
2 |
1,6 |
1,585 |
0,9980 |
-0,02 |
19,58 |
0,4832 |
-6,32 |
29,31 |
+12/-11 |
+1/-1 |
+6/-6 |
|
3 |
2 |
1,995 |
0,9992 |
-0,01 |
14,84 |
0,4819 |
-6,34 |
28,42 |
+12/-11 |
+1/-1 |
+6/-6 |
|
4 |
2,5 |
2,512 |
0,9997 |
0,00 |
10,97 |
0,4889 |
-6,22 |
30,41 |
+12/-11 |
+1/-1 |
+6/-6 |
|
5 |
3,15 |
3,162 |
0,9999 |
0,00 |
7,740 |
0,5246 |
-5,60 |
35,14 |
+12/-11 |
+1/-1 |
+6/-6 |
|
6 |
4 |
3,981 |
0,9999 |
0,00 |
4,941 |
0,6251 |
-4,08 |
39,31 |
+12/-11 |
+1/-1 |
+6/-6 |
|
7 |
5 |
5,012 |
1,0000 |
0,00 |
2,416 |
0,7948 |
-1,99 |
36,78 |
+12/-11 |
+1/-1 |
+6/-6 |
|
8 |
6,3 |
6,310 |
1,0000 |
0,00 |
0,0244 |
0,9470 |
-0,47 |
27,42 |
+12/-11 |
+1/-1 |
+6/-6 |
|
9 |
8 |
7,943 |
1,0000 |
0,00 |
-2,366 |
1,016 |
0,14 |
17,07 |
+12/-11 |
+1/-1 |
+6/-6 |
|
10 |
10 |
10,00 |
0,9999 |
0,00 |
-4,887 |
1,030 |
0,26 |
8,688 |
+12/-11 |
+1/-1 |
+6/-6 |
|
11 |
12,5 |
12,59 |
0,9999 |
0,00 |
-7,679 |
1,026 |
0,22 |
2,043 |
+12/-11 |
+1/-1 |
+6/-6 |
|
12 |
16 |
15,85 |
0,9997 |
0,00 |
-10,90 |
1,019 |
0,16 |
-3,729 |
+12/-11 |
+1/-1 |
+6/-6 |
|
13 |
20 |
19,95 |
0,9992 |
-0,01 |
-14,75 |
1,012 |
0,10 |
-9,330 |
+12/-11 |
+1/-1 |
+6/-6 |
|
14 |
25 |
25,12 |
0,9980 |
-0,02 |
-19,47 |
1,006 |
0,06 |
-15,31 |
+12/-11 |
+1/-1 |
+6/-6 |
|
15 |
31,5 |
31,62 |
0,9950 |
-0,04 |
-25,40 |
1,000 |
0,00 |
-22,16 |
+12/-11 |
+1/-1 |
+6/-6 |
|
16 |
40 |
39,81 |
0,9877 |
-0,11 |
-32,97 |
0,9911 |
-0,08 |
-30,43 |
+12/-11 |
+1/-1 |
+6/-6 |
|
17 |
50 |
50,12 |
0,9699 |
-0,27 |
2,78 |
0,9720 |
-0,25 |
-40,78 |
+12/-11 |
+1/-1 |
+6/-6 |
|
18 |
63 |
63,10 |
0,9291 |
-0,64 |
-55,49 |
0,9304 |
-0,63 |
-53,90 |
+12/-11 |
+1/-1 |
+6/-6 |
|
19 |
80 |
79,43 |
0,8457 |
-1,46 |
-71,41 |
0,8465 |
-1,45 |
-70,15 |
+26/-21 |
+2/-2 |
+12/-12 |
|
20 |
100 |
100,0 |
0,7071 |
-3,01 |
-89,68 |
0,7075 |
-3,01 |
-88,68 |
+26/-21 |
+2/-2 |
+12/-12 |
|
21 |
125 |
125,9 |
0,5336 |
-5,46 |
-107,9 |
0,5338 |
-5,45 |
-107,1 |
+26/-21 |
+2/-2 |
+12/-12 |
|
22 |
160 |
158,5 |
0,3699 |
-8,64 |
-123,8 |
0,3700 |
-8,64 |
-123,2 |
+26/-100 |
+2/-¥ |
+¥/-¥ |
|
23 |
200 |
199,5 |
0,2436 |
-12,27 |
-136,4 |
0,2437 |
-12,26 |
-135,9 |
+26/-100 |
+2/-¥ |
+¥/-¥ |
|
24 |
250 |
251,2 |
0,1565 |
-16,11 |
-146,1 |
0,1565 |
-16,11 |
-145,7 |
+26/-100 |
+2/-¥ |
+¥/-¥ |
|
25 |
315 |
316,2 |
0,09950 |
-20,04 |
-153,5 |
0,09951 |
-20,04 |
-153,2 |
+26/-100 |
+2/-¥ |
+¥/-¥ |
|
26 |
400 |
398,1 |
0,06297 |
-24,02 |
-159,2 |
0,06297 |
-24,02 |
-158,9 |
+26/-100 |
+2/-¥ |
+¥/-¥ |

X - частота, Гц; Y - весовой коэффициент; 1 - полосовой фильтр; 2 - функция частотной коррекции
Рисунок В.13 - Модуль функции частотной коррекции Wj
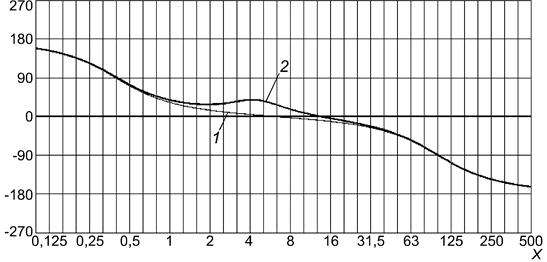
X - частота, Гц; Y - фаза, ...°; 1 - полосовой фильтр; 2 - функция частотной коррекции
Рисунок В.14 - Фаза функции частотной коррекции Wj
Таблица В.8 - Функция частотной коррекции Wk для общей вибрации в вертикальном направлении (ось z), воздействующей на человека в положении сидя, стоя или лежа (на основе ИСО 2631-1)
|
Среднегеометрическая частота, Гц |
Характеристика полосового фильтра |
Функция частотной коррекции Wk |
Допуск |
||||||||
|
Номинальная |
Истинная |
Модуль |
дБ |
Фаза, ...° |
Модуль |
дБ |
Фаза, ...° |
Модуль, % |
дБ |
Dj0, ...° |
|
|
-10 |
0,1 |
0,1000 |
0,06238 |
-24,10 |
159,3 |
0,03121 |
-30,11 |
159,8 |
+26/-100 |
+2/-¥ |
+¥/-¥ |
|
-9 |
0,125 |
0,1259 |
0,09857 |
-20,12 |
153,6 |
0,04931 |
-26,14 |
154,3 |
+26/-100 |
+2/-¥ |
+¥/-¥ |
|
-8 |
0,16 |
0,1585 |
0,1551 |
-16,19 |
146,3 |
0,07756 |
-22,21 |
147,1 |
+26/-100 |
+2/-¥ |
+¥/-¥ |
|
-7 |
0,2 |
0,1995 |
0,2415 |
-12,34 |
136,6 |
0,1207 |
-18,37 |
137,7 |
+26/-100 |
+2/-¥ |
+¥/-¥ |
|
-6 |
0,25 |
0,2512 |
0,3669 |
-8,71 |
124,1 |
0,1832 |
-14,74 |
125,4 |
+26/-100 |
+2/-¥ |
+¥/-¥ |
|
-5 |
0,315 |
0,3162 |
0,5300 |
-5,51 |
108,3 |
0,2644 |
-11,55 |
109,9 |
+26/-21 |
+2/-2 |
+12/-12 |
|
-4 |
0,4 |
0,3981 |
0,7037 |
-3,05 |
90,06 |
0,3504 |
-9,11 |
92,20 |
+26/-21 |
+2/-2 |
+12/-12 |
|
-3 |
0,5 |
0,5012 |
0,8434 |
-1,48 |
71,76 |
0,4188 |
-7,56 |
74,54 |
+26/-21 |
+2/-2 |
+12/-12 |
|
-2 |
0,63 |
0,6310 |
0,9279 |
-0,65 |
55,78 |
0,4588 |
-6,77 |
59,44 |
+12/-11 |
+1/-1 |
+6/-6 |
|
-1 |
0,8 |
0,7943 |
0,9693 |
-0,27 |
43,01 |
0,4767 |
-6,44 |
47,96 |
+12/-11 |
+1/-1 |
+6/-6 |
|
0 |
1 |
1,000 |
0,9874 |
-0,11 |
33,15 |
0,4825 |
-6,33 |
40,06 |
+12/-11 |
+1/-1 |
+6/-6 |
|
1 |
1,25 |
1,259 |
0,9949 |
-0,04 |
25,54 |
0,4846 |
-6,29 |
35,55 |
+12/-11 |
+1/-1 |
+6/-6 |
|
2 |
1,6 |
1,585 |
0,9980 |
-0,02 |
19,58 |
0,4935 |
-6,13 |
34,48 |
+12/-11 |
+1/-1 |
+6/-6 |
|
3 |
2 |
1,995 |
0,9992 |
-0,01 |
14,84 |
0,5308 |
-5,50 |
36,45 |
+12/-11 |
+1/-1 |
+6/-6 |
|
4 |
2,5 |
2,512 |
0,9997 |
0,00 |
10,97 |
0,6335 |
-3,97 |
37,98 |
+12/-11 |
+1/-1 |
+6/-6 |
|
5 |
3,15 |
3,162 |
0,9999 |
0,00 |
7,740 |
0,8071 |
-1,86 |
32,73 |
+12/-11 |
+1/-1 |
+6/-6 |
|
6 |
4 |
3,981 |
0,9999 |
0,00 |
4,941 |
0,9648 |
-0,31 |
20,35 |
+12/-11 |
+1/-1 |
+6/-6 |
|
7 |
5 |
5,012 |
1,0000 |
0,00 |
2,416 |
1,039 |
0,33 |
6,309 |
+12/-11 |
+1/-1 |
+6/-6 |
|
8 |
6,3 |
6,310 |
1,0000 |
0,00 |
0,0244 |
1,054 |
0,46 |
-6,841 |
+12/-11 |
+1/-1 |
+6/-6 |
|
9 |
8 |
7,943 |
1,0000 |
0,00 |
-2,366 |
1,037 |
0,32 |
-19,73 |
+12/-11 |
+1/-1 |
+6/-6 |
|
10 |
10 |
10,00 |
0,9999 |
0,00 |
-4,887 |
0,9884 |
-0,10 |
-33,30 |
+12/-11 |
+1/-1 |
+6/-6 |
|
11 |
12,5 |
12,59 |
0,9999 |
0,00 |
-7,679 |
0,8989 |
-0,93 |
-47,62 |
+12/-11 |
+1/-1 |
+6/-6 |
|
12 |
16 |
15,85 |
0,9997 |
0,00 |
-10,90 |
0,7743 |
-2,22 |
-61,84 |
+12/-11 |
+1/-1 |
+6/-6 |
|
13 |
20 |
19,95 |
0,9992 |
-0,01 |
-14,75 |
0,6373 |
-3,91 |
-75,03 |
+12/-11 |
+1/-1 |
+6/-6 |
|
14 |
25 |
25,12 |
0,9980 |
-0,02 |
-19,47 |
0,5103 |
-5,84 |
-87,02 |
+12/-11 |
+1/-1 |
+6/-6 |
|
15 |
31,5 |
31,62 |
0,9950 |
-0,04 |
-25,40 |
0,4031 |
-7,89 |
-98,35 |
+12/-11 |
+1/-1 |
+6/-6 |
|
16 |
40 |
39,81 |
0,9877 |
-0,11 |
-32,97 |
0,3160 |
-10,01 |
-109,9 |
+12/-11 |
+1/-1 |
+6/-6 |
|
17 |
50 |
50,12 |
0,9699 |
-0,27 |
-42,78 |
0,2451 |
-12,21 |
-122,7 |
+12/-11 |
+1/-1 |
+6/-6 |
|
18 |
63 |
63,10 |
0,9291 |
-0,64 |
-55,49 |
0,1857 |
-14,62 |
-137,6 |
+12/-11 |
+1/-1 |
+6/-6 |
|
19 |
80 |
79,43 |
0,8457 |
-1,46 |
-71,41 |
0,1339 |
-17,47 |
-155,2 |
+26/-21 |
+2/-2 |
+12/-12 |
|
20 |
100 |
100,0 |
0,7071 |
-3,01 |
-89,68 |
0,08873 |
-21,04 |
-174,8 |
+26/-21 |
+2/-2 |
+12/-12 |
|
21 |
125 |
125,9 |
0,5336 |
-5,46 |
-107,9 |
0,05311 |
-25,50 |
-194,1 |
+26/-21 |
+2/-2 |
+12/-12 |
|
22 |
160 |
158,5 |
0,3699 |
-8,64 |
-123,8 |
0,02922 |
-30,69 |
-210,7 |
+26/-100 |
+2/-¥ |
+¥/-¥ |
|
23 |
200 |
199,5 |
0,2436 |
-12,27 |
-136,4 |
0,01528 |
-36,32 |
-224,0 |
+26/-100 |
+2/-¥ |
+¥/-¥ |
|
24 |
250 |
251,2 |
0,1565 |
-16,11 |
-146,1 |
0,007795 |
-42,16 |
-234,2 |
+26/-100 |
+2/-¥ |
+¥/-¥ |
|
25 |
315 |
316,2 |
0,09950 |
-20,04 |
-153,5 |
0,003935 |
-48,10 |
-241,9 |
+26/-100 |
+2/-¥ |
+¥/-¥ |
|
26 |
400 |
398,1 |
0,06297 |
-24,02 |
-159,2 |
0,001978 |
-54,08 |
-247,9 |
+26/-100 |
+2/-¥ |
+¥/-¥ |

X - частота, Гц; Y - весовой коэффициент; 1 - полосовой фильтр; 2 - функция частотной коррекции
Рисунок В.15 - Модуль функции частотной коррекции Wk.

X - частота, Гц; Y - фаза, ...°; 1 - полосовой фильтр; 2 - функция частотной коррекции
Рисунок В.16 - Фаза функции частотной коррекции Wk
Таблица В.9 - Функция частотной коррекции Wm для общей вибрации в зданиях во всех направлениях (на основе ИСО 2631-2)
|
Среднегеометрическая частота, Гц |
Характеристика полосового фильтра |
Функция частотной коррекции Wm |
Допуск |
||||||||
|
Номинальная |
Истинная |
Модуль |
дБ |
Фаза, ...° |
Модуль |
дБ |
Фаза, ...° |
Модуль, % |
дБ |
Dj0, ...° |
|
|
-10 |
0,1 |
0,1000 |
0,01585 |
-36,00 |
169,7 |
0,01584 |
-36,00 |
168,7 |
+26/-100 |
+2/-¥ |
+¥/-¥ |
|
-9 |
0,125 |
0,1259 |
0,02511 |
-32,00 |
166,9 |
0,02510 |
-32,00 |
165,7 |
+26/-100 |
+2/-¥ |
+¥/-¥ |
|
-8 |
0,16 |
0,1585 |
0,03978 |
-28,01 |
163,5 |
0,03976 |
-28,01 |
161,9 |
+26/-100 |
+2/-¥ |
+¥/-¥ |
|
-7 |
0,2 |
0,1995 |
0,06297 |
-24,02 |
159,1 |
0,06293 |
-24,02 |
157,1 |
+26/-100 |
+2/-¥ |
+¥/-¥ |
|
-6 |
0,25 |
0,2512 |
0,0995 |
-20,04 |
153,4 |
0,09941 |
-20,05 |
150,8 |
+26/-100 |
+2/-¥ |
+¥/-¥ |
|
-5 |
0,315 |
0,3162 |
0,1565 |
-16,11 |
146,0 |
0,1563 |
-16,12 |
142,8 |
+26/-100 |
+2/-¥ |
+¥/-¥ |
|
-4 |
0,4 |
0,3981 |
0,2436 |
-12,27 |
136,3 |
0,2430 |
-12,29 |
132,2 |
+26/-100 |
+2/-¥ |
+¥/-¥ |
|
-3 |
0,5 |
0,5012 |
0,3699 |
-8,64 |
123,6 |
0,3684 |
-8,67 |
118,6 |
+26/-100 |
+2/-¥ |
+¥/-¥ |
|
-2 |
0,63 |
0,6310 |
0,5336 |
-5,45 |
107,7 |
0,5304 |
-5,51 |
101,3 |
+26/-21 |
+2/-2 |
+12/-12 |
|
-1 |
0,8 |
0,7943 |
0,7071 |
-3,01 |
89,36 |
0,7003 |
-3,09 |
81,40 |
+26/-21 |
+2/-2 |
+12/-12 |
|
0 |
1 |
1,000 |
0,8457 |
-1,46 |
71,00 |
0,8329 |
-1,59 |
42,49 |
+26/-21 |
+2/-2 |
+12/-12 |
|
1 |
1,25 |
1,259 |
0,9291 |
-0,64 |
54,98 |
0,9071 |
-0,85 |
26,56 |
+12/-11 |
+1/-1 |
+6/-6 |
|
2 |
1,6 |
1,585 |
0,9699 |
-0,27 |
42,14 |
0,9342 |
-0,59 |
12,83 |
+12/-11 |
+1/-1 |
+6/-6 |
|
3 |
2 |
1,995 |
0,9877 |
-0,11 |
32,17 |
0,9319 |
-0,61 |
0,5459 |
+12/-11 |
+1/-1 |
+6/-6 |
|
4 |
2,5 |
2,512 |
0,9950 |
-0,04 |
24,39 |
0,9101 |
-0,82 |
-10,89 |
+12/-11 |
+1/-1 |
+6/-6 |
|
5 |
3,15 |
3,162 |
0,9980 |
-0,02 |
18,20 |
0,8721 |
-1,19 |
-21,86 |
+12/-11 |
+1/-1 |
+6/-6 |
|
6 |
4 |
3,981 |
0,9992 |
-0,01 |
13,15 |
0,8184 |
-1,74 |
-32,52 |
+12/-11 |
+1/-1 |
+6/-6 |
|
7 |
5 |
5,012 |
0,9997 |
0,00 |
8,884 |
0,7498 |
-2,50 |
-42,85 |
+12/-11 |
+1/-1 |
+6/-6 |
|
8 |
6,3 |
6,310 |
0,9999 |
0,00 |
5,135 |
0,6692 |
-3,49 |
-52,73 |
+12/-11 |
+1/-1 |
+6/-6 |
|
9 |
8 |
7,943 |
0,9999 |
0,00 |
1,680 |
0,5819 |
-4,70 |
-62,07 |
+12/-11 |
+1/-1 |
+6/-6 |
|
10 |
10 |
10,00 |
0,9999 |
0,00 |
-1,680 |
0,4941 |
-6,12 |
-70,84 |
+12/-11 |
+1/-1 |
+6/-6 |
|
11 |
12,5 |
12,59 |
0,9999 |
0,00 |
-5,135 |
0,4114 |
-7,71 |
-79,15 |
+12/-11 |
+1/-1 |
+6/-6 |
|
12 |
16 |
15,85 |
0,9997 |
0,00 |
-8,884 |
0,3375 |
-9,44 |
-87,25 |
+12/-11 |
+1/-1 |
+6/-6 |
|
13 |
20 |
19,95 |
0,9992 |
-0,01 |
-13,15 |
0,2738 |
-11,25 |
-95,45 |
+12/-11 |
+1/-1 |
+6/-6 |
|
14 |
25 |
25,12 |
0,9980 |
-0,02 |
-18,20 |
0,2203 |
-13,14 |
-104,2 |
+12/-11 |
+1/-1 |
+6/-6 |
|
15 |
31,5 |
31,62 |
0,9950 |
-0,04 |
-24,39 |
0,1760 |
-15,09 |
-114,0 |
+12/-11 |
+1/-1 |
+6/-6 |
|
16 |
40 |
39,81 |
0,9877 |
-0,11 |
-32,17 |
0,1396 |
-17,10 |
-125,7 |
+12/-11 |
+1/-1 |
+6/-6 |
|
17 |
50 |
50,12 |
0,9699 |
-0,27 |
-42,14 |
0,1093 |
-19,23 |
-139,8 |
+12/-11 |
+1/-1 |
+6/-6 |
|
18 |
63 |
63,10 |
0,9291 |
-0,64 |
-54,98 |
0,08336 |
-21,58 |
-156,9 |
+12/-11 |
+1/-1 |
+6/-6 |
|
19 |
80 |
79,43 |
0,8457 |
-1,46 |
-71,00 |
0,06036 |
-24,38 |
-176,1 |
+26/-21 |
+2/-2 |
+12/-12 |
|
20 |
100 |
100,0 |
0,7071 |
-3,01 |
-89,36 |
0,04013 |
-27,93 |
-195,1 |
+26/-21 |
+2/-2 |
+12/-12 |
|
21 |
125 |
125,9 |
0,5336 |
-5,46 |
-107,7 |
0,02407 |
-32,37 |
-211,5 |
+26/-21 |
+2/-2 |
+12/-12 |
|
22 |
160 |
158,5 |
0,3699 |
-8,64 |
-123,6 |
0,01326 |
-37,55 |
-224,6 |
+26/-100 |
+2/-¥ |
+¥/-¥ |
|
23 |
200 |
199,5 |
0,2436 |
-12,27 |
-136,3 |
0,006937 |
-43,18 |
-234,7 |
+26/-100 |
+2/-¥ |
+¥/-¥ |
|
24 |
250 |
251,2 |
0,1565 |
-16,11 |
-146,0 |
0,003541 |
-49,02 |
-242,3 |
+26/-100 |
+2/-¥ |
+¥/-¥ |
|
25 |
315 |
316,2 |
0,09950 |
-20,04 |
-153,4 |
0,001788 |
-54,95 |
-248,3 |
+26/-100 |
+2/-¥ |
+¥/-¥ |
|
26 |
400 |
398,1 |
0,06297 |
-24,02 |
-159,1 |
0,000899 |
-60,92 |
-252,8 |
+26/-100 |
+2/-¥ |
+¥/-¥ |
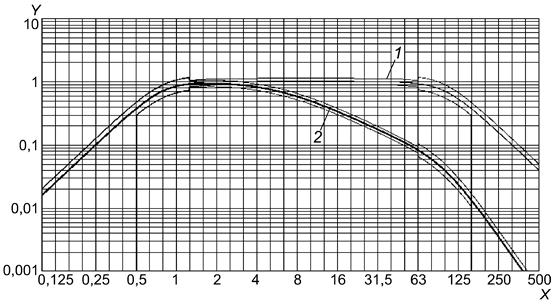
X - частота, Гц; Y - весовой коэффициент; 1 - полосовой фильтр; 2 - функция частотной коррекции
Рисунок В.17 - Модуль функции частотной коррекции Wm
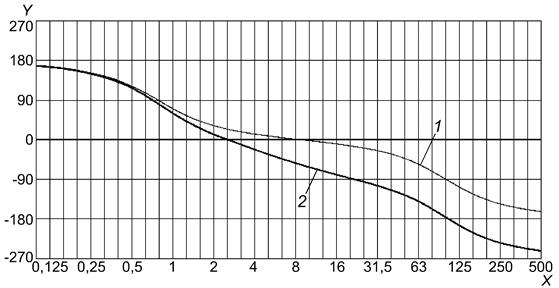
X - частота, Гц; Y - фаза, ...°; 1 - полосовой фильтр; 2 - функция частотной коррекции
Рисунок В.18 - Фаза функции частотной коррекции Wm
Приложение С
(рекомендуемое)
Реализация фильтров частотной коррекции
С.1 Реализация фильтров в частотной области
С.1.1 Общие положения
Для получения среднеквадратичного значения корректированного ускорения aw могут быть использованы любые методы частотного анализа [аналоговые или цифровые, в реальном масштабе времени, в третьоктавных полосах или с использованием быстрого преобразования Фурье (БПФ)], позволяющие получить среднеквадратичные значения спектральных составляющих ускорения аi для их последующего возведения в квадрат и суммирования с соответствующими весовыми коэффициентами:
![]() (С.1)
(С.1)
где wi - значение функции частотной коррекции на среднегеометрической частоте i-й полосы частот.
Примечание - Анализ вибрации в частотной области нельзя применять для получения значения дозы вибрации VDV. Его нельзя использовать также для получения текущего среднеквадратичного значения корректированного ускорения по данному стандарту, поскольку время интегрирования или постоянная времени интегрирования (1 с) сопоставимы с постоянной времени фильтра (величиной, обратно пропорциональной ширине полосы частот).
С.1.2 Анализ в третьоктавных полосах
Значения среднегеометрических частот при третьоктавном анализе - в соответствии с таблицами В.1 - В.9 (приложение В). В диапазон анализа должны входить по крайней мере по одной третьоктавной полосе выше и ниже номинального диапазона, определяемого границами f1 и f2 таблицы 3.
Перед проведением операций возведения в квадрат и суммирования по формуле (С.1) значения ускорения следует умножить на соответствующее значение функции частотной коррекции (см. 5.6 и таблицы В.1 - В.9 приложения В).
С.1.3 Быстрое преобразование Фурье
Среднеквадратичное значение корректированного ускорения может быть получено на основе среднеквадратичных значений составляющих БПФ сигнала вибрации в соответствии с формулой (С.1) или на основе составляющих спектральной плотности мощности PSD в соответствии с формулой (С.2). В каждом из этих случаев весовые коэффициенты (значения функции частотной коррекции) следует рассчитывать по формулам 5.6, а не брать из таблиц приложения В:
![]() (С.2)
(С.2)
При суммировании спектральных составляющих следует принимать во внимание эффект просачивания, связанный с использованным для формирования выборки временным окном. При анализе в широкой полосе частот рассчитанное в соответствии с формулой (С.2) среднеквадратичное значение корректированного ускорения aw следует разделить на коэффициент, соответствующий ширине полосы эквивалентного идеального фильтра, пропускающего белый шум той же мощности (см. таблицу С.1).
Таблица С.1 - Временные оконные функции и соответствующие коэффициенты
|
Коэффициент |
Типичное применение |
|
|
Хэннинг |
1,50 |
Общего применения, нестационарный случайный процесс |
|
Плосковершинное |
3,77 |
Периодический или синусоидальный сигнал (например, при калибровке) |
|
1) В других типичных ситуациях возможно применение других временных окон. |
||
БПФ-анализаторы обычно учитывают коэффициент выбранного временного окна по умолчанию.
Разрешение по частоте для БПФ должно быть менее 40 % (предпочтительно 20 %) нижней границы номинального диапазона частот. Частота выборки должна по крайней мере в 5 раз превышать верхнюю границу номинального диапазона частот.
С.2 Реализация фильтров во временной области
С.2.1 Общие положения
Оценка сигналов ускорения с точки зрения их воздействия на человека включает в себя процедуру частотной коррекции с использованием одного из фильтров, описанных в 5.6. При определении среднеквадратичного значения корректированного ускорения процедура умножения на функцию частотной коррекции может быть осуществлена как до интегрирования, так и после вычисления среднеквадратичных значений спектральных составляющих - результат будет одним и тем же. Но для определения таких параметров, как максимальное кратковременное среднеквадратичное значение MTTV [см. формулы (3) и (4)], необходимо измерять максимальное значение текущего среднеквадратичного значения ускорения, что требует выполнения процедуры умножения на функцию частотной коррекции до интегрирования по времени.
Применение при анализе во временной области цифровых фильтров позволяет ограничить использование дорогостоящих и громоздких (особенно в многоканальных системах) аналоговых устройств.
С.2.2 Преобразование из частотного представления во временное
Подобно тому, как для построения аналоговых фильтров в частотной области используется преобразование Лапласа, для цифровой фильтрации часто применяют z-преобразование. Передаточная функция цифрового фильтра может быть представлена в виде его z-преобразования H(z). В z-области преобразование Y(z) выходного сигнала цифрового фильтра связано с z-преобразованием входного сигнала X(z) формулой
Y(z) = H(z)X(z). (C.3)
H(z) может быть представлена в виде
 (C.4)
(C.4)
где аi и bi - постоянные коэффициенты;
М и N - число нулей и полюсов фильтра соответственно.
Эквивалентная формула для временной области будет иметь вид:
![]() (C.5)
(C.5)
где x(ti) и y(ti) - выборочные значения входного и выходного сигналов соответственно в момент времени ti.
С.2.3 Расчет коэффициентов фильтра
Коэффициенты фильтра аi и bi могут быть получены методом билинейного преобразования или методом импульсных инвариантов [5]. Метод билинейного преобразования наилучшим образом подходит для фильтров Баттерворта, в частности фильтров верхних и нижних частот, описанных в 5.6; z-преобразование этих двухполюсных фильтров может быть получено из преобразования Лапласа передаточной функции в 5.6 заменой переменной Лапласа s:
![]() (C.6)
(C.6)
где Ts - период выборки.
Аналогичный расчет или альтернативный метод импульсных инвариантов может быть использован для переходных и ступенчатых фильтров.
С.2.4 Применение фильтров
Фильтры с бесконечной импульсной характеристикой по очереди применяют к последовательности оцифрованных данных в порядке их поступления в соответствии с уравнением (С.5).
В качестве примера ниже приведена программа, моделирующая процедуру фильтрации для функции частотной коррекции Wk в кодах MATLAB®, где используют встроенную функцию «fillter.m», а также стандартные функции анализа сигналов «butter.m» и «bilinear.m»1).
1) MATLAB® является примером подходящего для использования в данной ситуации коммерческого продукта. Эта информация дана только для удобства пользователей настоящего стандарта. Ее не следует рассматривать как рекламную поддержку данного продукта.
Примечание - Приведенная на рисунке С.1
программа требует, чтобы частота выборки по крайней мере в 9 раз превышала
значение верхней частоты диапазона измерений f2 (по таблице 2), чтобы удовлетворить требованиям
настоящего стандарта по допуску на функцию частотной коррекции. Требование к
частоте выборки можно понизить, если изменить программу соответствующим
образом, например использовать преобразование ![]() , где fs - частота среза фильтра.
, где fs - частота среза фильтра.
|
% ISOFILWK |
|
Filter ISO 8041 Wk, whole body, vertical direction |
|
% у = isofilwk(x, fs); |
|
% у output signal vector, acceleration |
|
% x input signal vector, acceleration |
|
% fs sampling frequency Hz |
|
% bilinear transformation algorithm is used |
|
f1 = 0.4; |
|
f2 = 100; |
|
f3 = 12.5; |
|
f4 = 12.5; |
|
Q4 = 0.63; |
|
f5 = 2.37; |
|
Q5 = 0.91; |
|
f6 = 3.35; |
|
Q6 = 0.91; |
|
w3 = 2*pi*f3; |
|
w4 = 2*pi*f4; |
|
w5 = 2*pi*f5; |
|
w6 = 2*pi*f6; |
|
nyq = fs/2; % Nyquist frequency |
|
% |
|
% band limiting high pass and low pass |
|
% |
|
[b1,a1] = butter(2, f1/nyq, ¢high1); % High pass |
|
[b2,а2] = butter(2, f2/nyq); % Low pass |
|
% |
|
% a-v transition |
|
% |
|
B3 = [l/w3 1]; |
|
A3 = [1/w4/w4 l/Q4/w4 1]; |
|
[b3,а3] = bilinear(B3,A3,fs); |
|
% |
|
% upward step |
|
% |
|
B4 = [1/w5/w5 l/Q5/w5 I]*w5*w5/w6/w6; |
|
A4 = [1/w6/w6 l/Q6/w6 1]; |
|
[b4,а4] = bilinear(B4,A4,fs); |
|
% |
|
% Apply filter to input signal vector x (output to signal vector y) |
|
% |
|
у = filter(b2,a2,x); |
|
у = filter(b1/a1/y); |
|
у = filter(b3,a3,y); |
|
у = filter(b4,a4,y); |
Рисунок С.1 - Пример программы, реализующей фильтр Wk
Приложение
D
(рекомендуемое)
Измерение текущего среднеквадратичного значения корректированного ускорения
D.1 Линейное усреднение
Для практической реализации измерения текущего среднеквадратичного значения корректированного ускорения с использованием линейного усреднения [см. формулу (3)] применяют цифровые методы обработки сигнала, позволяющие хранить большие массивы данных (выборочных значений сигнала) - см. рисунок D.1.

k - текущий номер выборки; Dt - период дискретизации; q - период интегрирования
Рисунок D.1 - Метод линейного усреднения
D.2 Экспоненциальное усреднение
Метод экспоненциального усреднения [см. формулу (4)] долгое время являлся доминирующим при измерении шума и вибрации, воздействующих на человека. Вначале этот метод был стандартизован для шумомеров (характеристики «медленно» с постоянной времени 1 с и «быстро» с постоянной времени 0,125 с - см. [6]), а потом и для средств измерений вибрации. Экспоненциальное усреднение называют также «экспоненциальным интегрированием». Схема реализации данного метода показана на рисунке D.2.
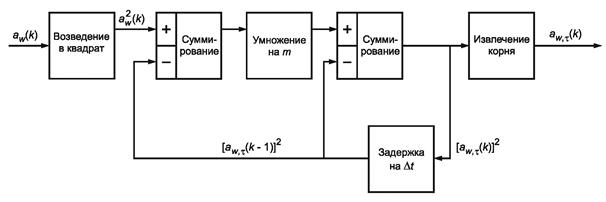
k - текущий номер выборки; Dt - период дискретизации; т = 1 - ехр(-Dt/t);
t - постоянная времени
экспоненциального усреднения (интегрирования)
Рисунок D.2 - Метод экспоненциального усреднения
D.3 Сравнение двух методов усреднения
Результаты, полученные с использованием формул (3) и (4), могут существенно различаться. Существует два основных правила обеспечения приблизительной эквивалентности результатов, полученных двумя вышеупомянутыми методами, которые применяют для разных видов измерений и типов вибрационного сигнала.
Правило 1. Для импульсных сигналов (ударов) время интегрирования при линейном усреднении выбирают равным постоянной времени при экспоненциальном усреднении (см. рисунок D.3).

А - экспоненциальное окно; В - прямоугольное окно линейного интегрирования
Рисунок D.3 -
Эквивалентное временное окно при измерении максимального
кратковременного среднеквадратичного значения для импульсных сигналов
Это обеспечивает наилучшее совпадение результатов измерений максимального кратковременного среднеквадратичного значения, однако и в данном случае возможны значительные расхождения в результатах измерений, которые зависят от длительности и формы импульсного сигнала.
Правило 2. Для случайного сигнала время интегрирования при линейном усреднении выбирают в два раза большим постоянной времени при экспоненциальном усреднении (см. рисунок D.4). Это обеспечивает наилучшее соответствие статистических параметров измерений текущего среднеквадратичного значения корректированного ускорения (дисперсия, доверительный интервал и др.).
А - экспоненциальное окно; В - прямоугольное окно линейного
интегрирования;
G - период линейного интегрирования; t - постоянная времени экспоненциального усреднения
Рисунок D.4 -
Эквивалентное временное окно при измерении
среднеквадратичного значения или других статистических параметров
То же самое справедливо для последовательности импульсов или периодических сигналов с небольшим шумом, однако при этом в случае линейного усреднения результат может сильно зависеть от соотношения времени интегрирования и периода сигнала.
Приложение
Е
(рекомендуемое)
Характеристики датчика вибрации
Е.1 Общие положения
Выбор датчиков вибрации, применяемых в задачах измерения вибрации, воздействующей на человека, зависит от многих факторов, в частности:
- целей применения (измерение локальной, общей и общей низкочастотной вибрации);
- назначения измерений (для оценки влияния вибрации на здоровье, комфорт или оценки чувствительности к вибрации);
- условий окружающей среды (например, температуры воздуха, влажности, запыленности);
- условий крепления (например, крепление на легкие конструкции, крепление в условиях ограниченного пространства для установки датчика).
Характеристики датчиков в настоящем приложении приведены исходя из задачи оценки влияния вибрации на здоровье человека. Для других целей измерения требования к характеристикам могут быть ослаблены или, наоборот, ужесточены.
Примечание - Требования настоящего стандарта установлены исходя из того, что величиной, измеряемой датчиком вибрации, является ускорение. Однако датчики, измеряющие другие параметры движения, в частности скорость, также могут быть использованы при условии удовлетворения установленных требований. При этом требования испытаний с использованием тестовых электрических сигналов должны быть соответствующим образом изменены.
Е.2 Характеристики
Рекомендуемые минимальные характеристики датчиков вибрации приведены в таблице Е.1 (могут быть применены не во всех случаях).
Таблица Е.1 - Характеристики датчика вибрации в зависимости от применения
|
Общие рекомендации исходя из влияния на неопределенность измерений |
Применение |
||||
|
Локальная вибрация |
Общая вибрация |
Общая низкочастотная вибрация |
|||
|
на транспорте |
внутри помещений |
||||
|
Максимальная общая масса (всех датчиков и системы крепления) |
Менее 10 % эффективной массы вибрирующей конструкции |
30 г |
450 г на сиденье 50 г в других местах |
1 кг |
1 кг |
|
Максимальная масса датчика |
- |
5 г |
50 г |
200 г |
200 г |
|
Максимальный общий размер (всех датчиков и системы крепления) |
Небольшой, чтобы оказывать минимальное влияние на деятельность человека |
Кубик размером 25 мм |
На сиденье: полужесткий диск (см. F.2) диаметром 300 мм и высотой 12 мм В других местах: кубик размером 30 мм |
200´200´50 мм |
200´200´100 мм |
|
Максимальная высота |
Расстояние между измерительной осью датчика параллельной вибрирующей поверхности и самой этой поверхностью должно быть мало, чтобы избежать усиления угловых составляющих ускорения |
10 мм |
10 мм |
25 мм |
25 мм |
|
Диапазон температур |
- |
От -10 °С до +50 °С |
От -10 °С до +50 °С |
От -10 °С до +50 °С |
От -10 °С до +50 °С |
|
Чувствительность к электромагнитным полям (30 мТл на частоте 50 или 60 Гц) |
- |
Менее 30 м/с2/Тл |
Менее 5 м/с2/Тл |
Менее 2 м/с2/Тл |
Менее 2 м/с2/Тл |
|
Чувствительность к акустическому давлению |
- |
Менее 0,05 м/с2/кПа |
Менее 0,01 м/с2/кПа |
Менее 0,01 м/с2/кПа |
Менее 0,01 м/с2/кПа |
|
Коэффициент преобразования в поперечном направлении |
- |
Менее 5 % |
Менее 5 % |
Менее 5 % |
Менее 5 % |
|
Максимальное ускорение |
Датчик должен выдерживать высокие ударные ускорения, которым он может быть подвергнут во время эксплуатации, с сохранением заданной точности измерений в заданном диапазоне частот |
30000 м/с2 (в отдельных случаях, например, при измерении вибрации пневматических молотков) до 50000 м/с2) |
1000 м/с2 |
500 м/с2 |
500 м/с2 |
|
Минимальная резонансная частота |
Примерно в 10 раз выше верхней границы номинального диапазона частот |
10 кГц |
800 Гц |
800 Гц |
5 Гц |
|
Минимальная защита оболочками |
Для защиты от воздействия влаги и пыли (в зависимости от конкретного применения - измерения в лабораторных условиях, во взрывоопасных средах и пр. - могут быть установлены другие требования к оболочкам) |
IP55 |
IP55 |
- |
IP55 |
Приложение
F
(рекомендуемое)
Испытания системы крепления датчика вибрации
F.1 Измерения локальной вибрации
F.1.1 Введение
Система крепления, используемая при измерениях локальной вибрации, должна иметь малую массу и размеры и высокую жесткость, чтобы выходной сигнал датчика вибрации как можно более точно воспроизводил ускорение вибрирующей поверхности.
В настоящем приложении приведены основные методы испытаний систем крепления однокомпонентного и трехкомпонентного датчиков вибрации.
F.1.2 Требования
F.1.2.1 Метод испытаний
Во время испытаний акселерометр устанавливают так, как показано на рисунке F.1. Эталонный акселерометр должен удовлетворять всем требованиям настоящего стандарта. Испытанию подвергают систему крепления и акселерометр, которые предназначены для использования в составе средства измерений, проверяемого на соответствие требованиям настоящего стандарта.
Для испытаний используют жесткие рукоятки в форме цилиндра диаметром 25 мм и длиной 125 мм. Вибрация должна воздействовать на рукоятку в направлении, указанном на рисунке F.1. Рукоятка может в любой точке иметь опору (опоры) при условии, что она не будет оказывать влияния на систему крепления и мешать фиксации системы крепления, при необходимости, рукой во время испытаний. Все измерения проводят в направлении воздействия вибрации.
Если конструкция системы крепления предполагает ее фиксацию на месте кистью руки, то она должна быть испытана в таких же условиях при больших и меньших усилиях нажатия. Если в технической документации указаны дополнительные устройства фиксации, их следует применять в процессе испытаний.
Примечание - Желательно усилие нажатия измерять и контролировать в ходе испытаний. Изменение усилия нажатия в ходе испытаний может оказать влияние на передаточную характеристику системы крепления.
Рукоятку возбуждают однонаправленной вибрацией в форме белого шума как показано на рисунке F.1. Диапазон частот вибрации - не менее чем от 31,5 до 1250 Гц; среднеквадратичное значение корректированного по характеристике Wh ускорения - 10 м/с2. Допуск на форму спектра сигнала, измеренного в контрольной точке испытуемой рукоятки, - ± 20 %.

а) Установка датчиков для измерений вдоль оси х
Рисунок F.1 - Установка датчиков вибрации, лист 1

b) Установка датчиков для измерений вдоль оси у

с) Установка датчиков для измерений вдоль оси z
1 - ось действия вибрации; 2 - испытуемый акселерометр; 3
- испытуемая система крепления;
4 - рукоятка; 5 - эталонный акселерометр
Рисунок F.1, лист 2
Выходные сигналы с эталонного и испытуемого акселерометров поступают на вход двухканального анализатора. Разрешение по частоте - не менее 8 Гц; диапазон анализа - не менее чем от 31,5 до 1250 Гц (дополнительная информация об измерениях в узкой полосе частот приведена в приложении С).
Измерения повторяют три раза в течение не менее 30 с каждое. Между измерениями систему крепления снимают и устанавливают заново.
В процессе измерений определяют передаточную функцию между сигналами эталонного и испытуемого акселерометров, которая не должна отличаться от единицы более чем на ± 15 % во всем диапазоне частот измерений. Кроме этого, измеряют функцию когерентности, значение которой на всех частотах от 31,5 до 1250 Гц должно быть выше 0,8.
При отсутствии двухканального анализатора следует провести одновременные измерения спектров сигналов с эталонного и испытуемого акселерометров. На всех частотах от 31,5 до 1250 Гц спектр испытуемого акселерометра не должен отличаться от спектра эталонного акселерометра более чем на 15 %.
По возможности рекомендуется провести предварительные испытания испытуемого акселерометра, установив его жестко на рукоятке, например с помощью шпильки или клея, т.е. без использования системы крепления. Эти дополнительные испытания позволят получить некоторые базовые данные, с которыми впоследствии можно сравнить окончательные результаты испытаний.
F.1.2.2 Представление результатов
Техническая документация должна содержать следующие данные:
- тип и серийный номер эталонного датчика вибрации;
- разрешение по частоте частотного анализа;
- максимальное отклонение от эталонного спектра в контрольной точке (в процентах) и частота, на которой это отклонение имеет место для испытаний по каждому из направлений возбуждения вибрации х, у и z.
Дополнительно может быть представлена распечатка передаточной функции, полученной в результате испытаний.
F.2 Измерения общей вибрации
Один из методов крепления датчика вибрации для измерений общей вибрации на подушке или спинке сиденья транспортного средства установлен в [7].
Согласно этому методу акселерометр крепят в центре установочного диска диаметром (250 ± 50) мм. Толщина диска должна быть, по возможности, минимальна, а высота не превышать 12 мм. Этот полужесткий установочный диск (жесткость приблизительно 80 - 90 дурометрических единиц по шкале А) из формованной резины или пластика должен иметь в середине полость, куда устанавливают акселерометр. Акселерометр прикрепляют к тонкому металлическому диску толщиной (1,5 ± 0,2) мм и диаметром (75 ± 5) мм.
Приложение
G
(обязательное)
Техническая документация
G.1 Общая информация
Приводят следующую информацию:
- ссылку на настоящий стандарт;
- дату калибровки средства измерений с указанием метода сопоставления с метрологическими эталонами;
- описание всего средства измерений в той конфигурации, которая обеспечивает нормальный режим работы, включая, если это необходимо, расширительные кабели, систему крепления, механический фильтр и другие устройства;
- описание акселерометра (акселерометров), рекомендуемого (рекомендуемых) для использования в составе средства измерений;
- описание характеристик и способов работы каждого канала многоканального средства измерений;
- перечень дополнительных средств, которые могут потребоваться, чтобы средство измерений соответствовало установленным требованиям (например, механические фильтры, системы крепления или кабели, программные средства);
- перечень дополнительных средств, которые могут быть использованы в специальных задачах и при особых обстоятельствах (например, средства крепления или датчики для проведения измерений в условиях сильных ударов).
G.2 Особенности конструкции
Приводят следующую информацию:
- описание величин, которые могут быть измерены с помощью средства измерений (среднеквадратичное значение корректированного ускорения, текущее среднеквадратичное значение корректированного ускорения, доза вибрации и др.) по отдельности или в совокупности;
- описание применяемых функций частотной коррекции и соответствующих полосовых фильтров;
- описание метода или методов, используемых для объединения данных, включая указание используемых функций частотной коррекции и соответствующих коэффициентов для разных направлений (в случае проведения измерений по нескольким направлениям);
- сведения о дополнительно реализованных в средстве измерений функциях частотной коррекции и передаточных характеристиках соответствующих фильтров, требования к которым не установлены настоящим стандартом, с указанием их назначения, а также о допусках на эти величины;
- описание используемых при интегрировании сигнала временных окон;
- описание диапазонов измерений и способа контроля используемого диапазона измерений;
- описание всех показывающих устройств, в том числе описание режима работы цифровых дисплеев и способа идентификации измеренной величины. При наличии нескольких показывающих устройств должно быть указано, какие из них работают в соответствии с требованиями настоящего стандарта, а какие предназначены для других целей.
Примечание - Устройства выхода по постоянному или переменному току, а также цифровые выходы не следует рассматривать как показывающие устройства;
- описание нормального режима работы всего средства измерений в целом;
- перечень дополнительных устройств в составе средства измерений, требования к которым установлены настоящим стандартом;
- значения номинальных параметров вибрации на верхней и нижней границах рабочего диапазона линейности на опорной частоте для каждого диапазона измерений;
- значения нижней и верхней границ диапазона ускорений, которые могут быть измерены данным средством измерений, как функции частоты для каждой используемой функции частотной коррекции и пределы допуска на эти значения;
- описание работы в режиме удержания пикового значения и способа обновления показаний;
- описание процедуры приведения средства измерений в состояние готовности (переустановки) для измерения среднеквадратичного значения корректированного ускорения, пикового значения, дозы вибрации, максимального кратковременного среднеквадратичного значения. Указание, происходит ли при выполнении данной процедуры сброс показания индикатора перегрузки. Значение номинальной временной задержки между началом процедуры переустановки и началом периода измерений;
- описание работы и способа интерпретации показаний индикаторов перегрузки и нечувствительности по входу и метода сброса их показаний;
- указание программного средства, необходимого для работы средства измерений, и описание процедур его установки и использования;
- указание версии внешнего программного средства или встроенного аппаратного средства, необходимого для выполнения установленных требований.
G.3 Коэффициент преобразования
Приводят следующую информацию:
- описание вибрационного калибратора или калибраторов, которые могут быть использованы для определения коэффициента преобразования измерительной цепи средства измерений;
- опорную частоту (частоты);
- рекомендуемые методы контроля и регулировки коэффициента преобразования измерительной цепи с использованием опорного сигнала на опорной частоте в опорном диапазоне измерений;
- предполагаемую скорость дрейфа значения коэффициента преобразования в нормальных рабочих условиях;
- процедуру контроля на рабочем месте (см. раздел 13).
G.4 Чувствительность к изменению внешних факторов
Приводят следующую информацию:
- процедуры коррекции результатов измерений в условиях температуры и влажности воздуха, отличающихся от нормальных;
- перечень элементов средства измерений, удовлетворяющих соответствующим требованиям настоящего стандарта по чувствительности к изменению внешних условий;
- интервал времени, необходимый для стабилизации работы средства измерений после изменения внешних условий;
- описание влияния электростатических разрядов на работу средства измерений. Указание на возможные нарушения в работе или ухудшение качества работы в результате воздействия электростатических разрядов. Для средств измерений, требующих от пользователя доступа к некоторым точкам внутри измерительного блока во время технического обслуживания, - меры предосторожности, если необходимо, которые следует применять для защиты от электростатических разрядов;
- подтверждение того факта, что средство измерений удовлетворяет основным требованиям настоящего стандарта по устойчивости к воздействию радиочастотного электромагнитного поля и помех сетевой частоты;
- рекомендуемую длину соединительных кабелей, если предусмотрено их использование с данным средством измерений, и устройства, подсоединяемые этими кабелями;
- режим(ы) работы средства измерений и присоединенных устройств, при котором(ых) устойчивость к воздействию радиочастотного электромагнитного поля и помех сетевой частоты минимальна;
- ориентацию средства измерений, при которой его чувствительность к помехам сетевой частоты максимальна;
- указание на соответствие требованиям по излучению в области радиочастот.
G.5 Питание
Приводят следующую информацию:
- рекомендации по типу батареи, номинальной длительности ее работы в нормальных условиях при полной зарядке (для средства измерений с собственными батареями питания);
- описание рекомендуемого метода контроля работы системы питания;
- рекомендуемые условия работы средства измерений от внешнего источника питания (для средства измерений с питанием от батарей);
- значение номинального напряжения сети и частоты переменного тока (для средства измерений, предназначенного для работы от сети переменного тока).
G.6 Датчик вибрации
Приводят следующую информацию:
- частотную характеристику датчика вибрации (реальную для данного датчика или типичную для данной модели);
- массы датчика вибрации и прилагаемого устройства (устройств) крепления;
- геометрические размеры датчиков вибрации и устройств крепления;
- направление осей чувствительности датчика вибрации относительно точки крепления;
- рабочий диапазон температур и чувствительность к температуре;
- чувствительность к электромагнитным полям;
- чувствительность к акустическому давлению;
- коэффициент преобразования в поперечном направлении;
- максимально допустимое ускорение;
- резонансную частоту;
- устойчивость к влаге и пыли.
G.7 Дополнительные приспособления
Приводят следующую информацию:
- поправки, которые необходимо внести в результаты измерений в случае использования дополнительных кабелей между акселерометром и измерительным блоком;
- диапазон среднеквадратичных значений выходного синусоидального напряжения, внутренний электрический импеданс выходного устройства, рекомендуемый диапазон импедансов нагрузок и пределы допуска для выходного сигнала (для аналогового выходного сигнала);
- способ использования средства измерений при наличии внешних фильтров;
- способ подсоединения вспомогательных устройств и об их влиянии на электрические характеристики средства измерений;
- рекомендуемую длину соединительных кабелей и описание возможных присоединяемых устройств (для средств измерений, допускающих соединение кабелями отдельных элементов или присоединение с их помощью внешних устройств).
G.8 Работа средства измерений
Приводят следующую информацию:
- время установления режима измерений после включения средства измерений, когда оно может быть использовано для измерения вибрации в типичных условиях окружающей среды;
- временной интервал между окончанием измерений и появлением результатов измерений на показывающем устройстве;
- максимальный и минимальный периоды интегрирования сигнала;
- описание способа установки периода интегрирования;
- описание рекомендуемого метода передачи или загрузки оцифрованных данных на внешнее средство хранения или показывающее устройство с указанием программного и аппаратурного обеспечения, позволяющего выполнять указанные операции;
- типичные значения внутреннего шума измерительной цепи, включающего в себя датчик вибрации и измерительный блок, в форме среднеквадратичного значения корректированного ускорения для заданного периода интегрирования для всех функций частотной коррекции, реализуемых данным средством измерений (по крайней мере, для нормальных внешних условий).
G.9 Дополнительная информация для проведения испытаний средства измерений
Приводят следующую информацию:
- рекомендации по процедурам и методам проведения испытаний, демонстрирующих соответствие требованиям настоящего стандарта или технической документации (для процедур, не рассматриваемых в настоящем стандарте);
- указание опорного диапазона измерений и значения его нижней границы;
- значение эквивалентного электрического импеданса акселерометра (акселерометров). Рекомендуемые средства для получения входного электрического сигнала, эквивалентного сигналу с акселерометра. Описание устройства формирования электрического сигнала;
- значение максимального ускорения, воздействующего на акселерометр, и максимального размаха напряжения электрического сигнала;
- минимальное напряжение питания, позволяющее средству измерений работать в соответствии с требованиями настоящего стандарта;
- описание ориентации средства измерений при проведении испытаний на воздействие радиочастотных электромагнитных полей;
- описание режима или режимов работы средства измерений и любых подсоединенных устройств, при которых уровень радиочастотного излучения максимален. Перечень конфигураций средства измерений, для которых уровень радиочастотного излучения будет таким же или меньшим;
- описание влияния изменения температуры воздуха на коэффициент преобразования измерительной цепи средства измерений.
Приложение Н
(обязательное)
Требования к реализации фазочастотной характеристики при измерении параметров вибрации
Н.1 Общие положения
Требования к точности воспроизведения заданной фазочастотной (фазовой) характеристики устанавливают при измерении таких параметров вибрации, как пиковое значение, доза вибрации и максимальное кратковременное среднеквадратичное значение, которые чувствительны к погрешности преобразования фазы сигнала. В настоящем приложении рассмотрены проблемы, которые могут возникнуть из-за отклонений номинальной фазочастотной характеристики средства измерений от заданной при измерении вышеуказанных параметров, а также установлены методы испытаний для оценки этих отклонений.
Примечание - В 5.9 установлены требования к результатам измерений пиковых значений и других параметров вибрации в ответ на сигнальную посылку с пилообразным заполнением импульса. Данные измерения чувствительны к отклонениям в фазочастотной характеристике функции частотной коррекции, поскольку сигнальная посылка сформирована таким образом, что содержит несколько гармонических составляющих. Это, тем не менее, не обеспечивает проверки фазочастотной характеристики во всем диапазоне частот.
Комплексная функция частотной коррекции определена в 5.6 таким образом, чтобы она могла быть реализована совокупностью простых аналоговых фильтров. Если средство измерений осуществляет цифровое преобразование сигнала, требуемая точность реализации фазочастотной характеристики может быть обеспечена применением рекурсивных цифровых фильтров при достаточно высокой частоте выборки. Однако для средств измерений, использующих нерекурсивные (трансверсальные) цифровые фильтры (например, фильтр с идеальной фазовой характеристикой) или осуществляющих частотную коррекцию сигнала посредством частотного анализа (с использованием полосовых фильтров или различных реализаций преобразований Фурье), ошибки в измерении чувствительных к погрешности преобразования фазы параметров сигнала могут быть весьма значительны.
Н.2 Определение и оценка фазочастотной характеристики
Н.2.1 Общие положения
Измерительная цепь средства измерений должна быть реализована таким образом, чтобы удовлетворять формулам (8) - (12). При этом фазочастотная характеристика определяется формулой
![]() (H.1)
(H.1)
где H(s) - передаточная функция по формуле (12). Значения фазового угла j приведены в таблицах В.1 - В.9 приложения В.
Номинальную фазовую характеристику измерительной цепи необходимо сравнить с заданной фазовой характеристикой. Однако погрешности измерений, связанные с отклонением фазовой характеристики, не имеют простой связи с разностью номинальной и заданной фазовых характеристик. Большое значение имеет то, как эта разность изменяется с изменением частоты. В связи с этим задают такой параметр, как характеристическая фазовая девиация Dj0. Его определяют исходя из отклонения номинальной фазовой характеристики от заданной по формуле
Dj0(f) = |Dj(f) - fDj¢(f)|, (Н.2)
где f - частота;
Dj(f) - отклонение фазовой характеристики;
Dj¢(f) - первая производная отклонения фазовой характеристики по частоте (наклон кривой отклонения фазовой характеристики).
Введение нового параметра объясняется тем, что, если бы допуск был задан на отклонение фазовой характеристики Dj(f), то для достижения заданной точности измерений параметров вибрации коридор между границами допуска пришлось бы делать очень узким. Задание допуска на параметр Dj0 предполагает большую вариативность Dj(f) при сохранении той же точности измерений.
Примечание - Если бы допуск был задан на отклонения фазовой характеристики, то при постоянстве для всего диапазона частот группового времени задержки (т.е. когда отклонение фазовой характеристики пропорционально частоте), этот допуск с большой вероятностью может быть превышен, тогда как значения измеряемых параметров вибрации и характеристическая фазовая девиация оставались неизменными. И наоборот, если групповое время задержки зависит от частоты, это может существенно повлиять на точность измерения таких параметров вибрации, как, например, пиковое ускорение, в то время как отклонения фазовой характеристики останутся в пределах допуска.
Для практических целей достаточно определить Dj0(f) для отдельных частот fn с шагом, предпочтительно, треть октавы. При этом уравнение (Н.2) приближенно может быть записано в следующем виде [см. также уравнение (13)]:
 . (H.3)
. (H.3)
Данная формула позволяет вычислять характеристическую фазовую девиацию Dj0(f) для всех частот fn, за исключением наивысшей частоты диапазона.
Допуски на характеристическую фазовую девиацию определены в таблице 5 и табулированы в таблицах В.1 - В.9 приложения В.
Вероятная максимальная погрешность измерения пикового значения DPVmax, обусловленная отклонением фазовой характеристики, может быть приближенно определена по формуле
DPVmax » ± max{0,48 sin[Dj0(fn)]}100 %. (Н.4)
Для максимально допустимого значения характеристической фазовой девиации 12° максимальная погрешность измерения пикового значения составит приблизительно 10 %.
Примечание - Формула (Н.4) получена расчетным путем и применима только к малым значениям Dj0 (менее 30°). Реальная погрешность измерения пикового значения зависит от формы входного сигнала и, как правило, меньше значения DPVmax, которое было получено для наихудшего случая сочетания во входном сигнале двух синусоидальных составляющих. Однако если входной сигнал содержит большее число составляющих, то возможны (хотя и маловероятны) такие сочетания, которые дадут значение погрешности, превышающее DPVmax. Поэтому со статистической точки зрения выражение «максимальная погрешность» следует трактовать как квантиль распределения малого уровня. Хотя изначально расчетный метод был ориентирован на оценку пикового значения, его можно в качестве первого приближения принять для оценки измерения дозы вибрации.
В настоящем приложении установлены два метода, которые позволяют проверить соответствие характеристической фазовой девиации заданным требованиям: прямой и косвенный.
Данный метод требует выполнения двух условий:
- доступности сигнала, прошедшего процедуру частотной коррекции (в аналоговом или цифровом виде), перед тем как сигнал поступит в блок преобразования для выделения искомого параметра вибрации;
- незначительности фазовых искажений, вносимых при последующих преобразованиях этого сигнала.
Оценку фазовой характеристики проводят в соответствии с ИСО 16063-21 с помощью эталонного акселерометра с калиброванной фазовой характеристикой. Фазовая характеристика эталонного акселерометра может быть калибрована по ИСО 16063-11 или ИСО 16063-12.
Н.2.3 Косвенный метод
Н.2.3.1 Условия применения метода
Данный метод, использующий в качестве тестового сигнала сочетание двух синусоид (двухтональный сигнал), рекомендуется применять для измерений пикового значения вибрации, если сигнал, прошедший процедуру частотной коррекции, недоступен.
Н.2.3.2 Принцип испытаний с использованием двухтонального тестового сигнала
Двухтональную вибрацию с параметрами ffu, rfu, jfu и fha, rha, jha (где f - частота, r - с.к.з.; j - начальная фаза синусоидального сигнала, а подстрочные индексы fu и ha обозначают сигнал основного тона и его гармонику соответственно) воспроизводят и передают на средство измерений с помощью вибростенда. Параметры вибрации ffu, rfu, fha и rha задают таким образом, чтобы пиковое значение сигнала было максимально чувствительно к небольшим отклонениям фазовой характеристики измерительной цепи. Это требование выполняется при одновременном соблюдении следующих условий: ffu/fha = 3 и rfu/rha = 3.
При варьировании начальной фазы гармоники jha пиковое значение проходит через относительно острый минимум в точке jha = 3jfu, когда «горбы» основного тона и гармоники находятся в противофазе. Эту точку можно найти, используя фазосдвигающее устройство и наблюдая измеренное пиковое значение на показывающем устройстве. Минимальное пиковое значение равно 0,943rfu.
Вблизи этого минимума погрешность определения пикового значения вследствие отклонения фазовой характеристики максимальна и достигает 1,75 %/°.
На рисунке Н.1 показаны формы сигналов при jha = 15° и jfu = 0°, а на рисунке Н.2 показан график зависимости пикового значения от jha при jfu = 0°.
Метод дает также выражение для диапазона изменений погрешности измерения пикового значения вибрации вследствие отклонения фазовой характеристики измерительной цепи для данного тестового сигнала.
В случае произвольного тестового сигнала указанная погрешность может быть меньше (те же две синусоиды, но с другим соотношением амплитуд и частот) или больше (сигнал с крутым фронтом или кратковременный импульс).

X - фаза основного тона, ...°; Y - значение сигнала; 1
- основной тон;
2 - гармоника (начальная фаза сдвинута на 15°); 3 -
результирующий сигнал
Рисунок Н.1 - Формы сигналов

X - фазовый сдвиг гармоники,...°; Y - значение параметра
вибрации;
1 - пиковое значение, м/с2; 2 - доза вибрации, м/с1,75;
3 - с.к.з., м/с2
Рисунок Н.2 - Зависимость пикового значения и дозы вибрации от фазового сдвига гармоники
Н.2.3.3 Испытательное оборудование
Большая часть оборудования, необходимая для проведения испытания с воспроизведением двухтональной вибрации, - та же, что используют для калибровки частотной характеристики измерительной цепи. В состав испытательного оборудования входят:
a) генератор гармоник (или двухтональный генератор) с регулируемым соотношением параметров гармоник [по крайней мере, обеспечивающий воспроизведение сигнала основной частоты и его третью гармонику) или генератор синусоидального сигнала в сочетании с умножителем (делителем) частоты];
b) если генератор не обеспечивает настройку амплитуд и начальных фаз гармоник, в состав испытательного оборудования дополнительно включают:
- два усилителя с регулируемыми коэффициентами усиления,
- фазовращатель (фазосдвигающий мост, линию задержки);
c) устройство суммирования (суммирующий усилитель), если оно не является составной частью другого используемого в испытаниях оборудования;
d) вибростенд с усилителем мощности;
e) эталонный акселерометр с калиброванными амплитудно-частотной и фазочастотной характеристиками;
f) фазометр, позволяющий измерять сдвиг фаз между гармониками;
д) испытуемое средство измерений.
Блок-схема испытательной установки показана на рисунке Н.3.
Для автоматизации процедуры испытаний рекомендуется применять управление испытательным оборудованием от персонального компьютера.

1 - генератор двухканального сигнала с контролируемым сдвигом фаз; 2
- усилитель с регулируемым коэффициентом усиления;
3 - фазовращатель; 4 - фазометр; 5 - сумматор с усилителем
мощности; 6 - датчик вибрации испытуемого средства измерений;
7 - эталонный акселерометр; 8 - вибростенд; 9 -
измерительный блок испытуемого средства измерений
Рисунок Н.3 - Блок-схема испытательной установки
Н.2.3.4 Метод испытаний
Средство измерений настраивают на показание пикового значения корректированного ускорения, после чего выполняют последовательность операций:
a) регулируют частоты сигналов, воспроизводимые генератором, таким образом, чтобы они находились в середине диапазона частот испытаний (например, для измерений общей вибрации устанавливают ffu = 9 Гц, fha = 27 Гц);
b) при включенном канале основной частоты (Sfu) и отключенном канале гармоники (Sha) регулируют коэффициент усиления усилителя Afu таким образом, чтобы результат измерения пикового значения apeak,fu находился в области 60 % диапазона шкалы средства измерений. Считывают показание фазометра (значение Фfu);
c) при отключенном канале основной частоты (Sfu) и включенном канале гармоники (Sha) регулируют коэффициент усиления усилителя Aha таким образом, чтобы измеренное средством измерений пиковое значение составляло одну треть измеренного значения apeak,fu, т.е. apeak,ha = apeak,fu/3. Настраивают фазовращатель таким образом, чтобы показания фазометра оставались теми же, что и в шаге b), с коррекцией на время задержки сигнала от эталонного акселерометра. Тогда фазометр будет показывать следующую величину:
![]() ,
,
где ftr,fu - сдвиг фазы эталонного акселерометра на частоте ffu,
ftr,ha - сдвиг фазы эталонного акселерометра на частоте fha,
fha/ffu - коэффициент преобразования ftr,ha.
Такая регулировка позволит обеспечивать равенство начальных фаз основного сигнала и его гармоники при их совместном воспроизведении на вибростоле.
Примечания
1 Предполагается, что фазовый сдвиг привязан к фазе основного тона. Поэтому значение ftr,ha должно быть умножено на коэффициент fha/ffu. Возможен другой вариант, когда делением на 2pf все фазы преобразуют в значения запаздывания по фазе и сравнивают эти значения. В этом случае фазометр следует настроить так, чтобы он показывал непосредственно значение запаздывания по фазе.
2 Фазовращатель может влиять на амплитуду сигнала и, наоборот, амплитуда сигнала может влиять на значение сдвига. Поэтому следует убедиться в наличии или отсутствии такого влияния и, при необходимости, выполнить соответствующую регулировку. Небольшие изменения амплитуды не будут оказывать существенных влияний на измерения фазы;
d) при включенных каналах Sfu и Sha настроить фазовращатель таким образом, чтобы показываемое средством измерений пиковое значение ускорения было минимальным.
Это означает, что сигнал основной частоты и его третья гармоника поступили на устройство измерения пикового значения ускорения с нулевыми начальными фазами.
Для проверки этого условия следует считать полученное минимальное пиковое значение, которое должно быть равно 0,943rfu. Изменяя настройку фазовращателя, получают максимальное пиковое значение, равное 1,333rfu, на показывающем устройстве. После этого возвращают фазовращатель в состояние, когда показываемое пиковое значение минимально;
e) при включенных каналах Sfu и Sha считать на фазометре значение jha+. Рассчитать дополнительный фазовый сдвиг, внесенный фазовращателем при выполнении шага d):
Df = fha+ - fha.
После этого рассчитать значение Dq:
![]()
Эта величина равна разности запаздываний по фазе, вносимых измерительной цепью, на частотах ffu и fha;
f) повторить шаги b) - е), увеличивая (уменьшая) значения частоты основного тона и гармоники в три раза до тех пор, пока не будет пройден весь диапазон измерений, установленный настоящим стандартом (например, для измерений общей вибрации пары частот основного тона и гармоники будут иметь вид: 1 и 3 Гц, 3 и 9 Гц, 9 и 27 Гц, 27 и 81 Гц);
g) построить последовательность, в которой первый член будет представлять собой значение Dq для основного тона низшей частоты, а каждый последующий (соответствующий более высокому тону) - сумму предыдущего члена и значения Dq для данного тона. Полученная последовательность будет представлять собой выборочные значения непрерывной зависимости запаздывания по фазе от частоты, известные с точностью до некоторой постоянной составляющей (запаздывания по фазе для основного тона низшей частоты);
h) чтобы получить значения зависимости на промежуточных частотах, изменить значения частот на коэффициент 30,2 (соответствует 95 % трети октавы) и повторить шаги b) - е);
i) повторить шаг h) четыре раза, каждый раз получая новую последовательность выборочных значений. Объединить все пять последовательностей выборочных значений в одну общую последовательность. При этом значения аргументов (частот) будут равноудалены друг от друга на логарифмической шкале. Соответствующие задержки по фазе, отложенные по оси ординат (также в логарифмическом масштабе), будут осциллировать относительно некоторой гладкой кривой, что обусловлено разными значениями неизвестного запаздывания по фазе для основного тона низшей частоты для каждой из пяти последовательностей;
j) сгладить полученные выборочные значения непрерывной кривой, зафиксировав первую точку сформированной общей последовательности [значение запаздывания по фазе для основного тона низшей частоты первой последовательности, полученной в результате выполнения шага f)] и подбирая соответствующим образом значения запаздывания по фазе для основных тонов низшей частоты других четырех последовательностей [полученных в результате выполнения шага h)], например с помощью рекуррентной процедуры или графическим методом. Тогда экспериментально полученная зависимость запаздывания по фазе от частоты будет определена с точностью до некоторого постоянного слагаемого;
k) исходя из фазовой характеристики для данной функции частотной коррекции, установленной настоящим стандартом, рассчитать зависимость запаздывания по фазе от частоты. Для этого значения фазы, определенные в соответствующей таблице (В.1 - В.9 приложения В), надо уменьшить на 180°, разделить на 360° и разделить на значение частоты в герцах. Вычитание фазового угла 180° (инверсия частот сигнала) представляет собой приведение к основной ветви функции арктангенса (в таблицах В.1 - В.9 и в соответствующих им рисунках зависимости фазы функции частотной коррекции от частоты этот угол был, наоборот, добавлен) и необходимо для того, чтобы значения запаздывания по фазе от частоты лежали в положительной области.
Примечание - Сдвиг всех частотных составляющих на 180° оставляет форму сигнала неизменной, но существенно изменяет значение характеристической фазовой девиации Dj0. В этом нет никакого противоречия, поскольку параметр Dj0 введен исключительно с целью оценить допустимость отклонения фазовой характеристики от заданной и не должен являться инвариантом к изменению полярности сигнала. Инверсия частот - особая форма преобразования сигнала, которая может потребовать применения специальных методов испытаний, например при измерении параметров вибрации, чувствительных к направлению, таких как максимальное или минимальное значение ускорения или спектр отклика, однако эти измерения настоящий стандарт не рассматривает;
l) подогнать экспериментальную зависимость под теоретическую, полученную на шаге k), соответствующим выбором постоянной составляющей. Обычно это не составляет труда, поскольку типичная фазовая характеристика, приведенная к логарифмическому масштабу по обеим осям, близка к линейной в широком диапазоне частот. Это справедливо для всех функций частотной коррекции, рассматриваемых настоящим стандартом;
m) преобразовать полученную после выполнения шага l) экспериментальную зависимость запаздывания по фазе обратно в фазовую область, умножая сначала на 360°, а потом на значение частоты, что дает в результате оценку фазовой характеристики данной измерительной цепи средства измерений;
n) по результатам шага m) рассчитать характеристическую фазовую девиацию Dj0, как указано в Н.2.2. Критерий на основе Dj0 инвариантен по отношению к постоянному значению запаздывания по фазе, поэтому погрешности определения данного параметра не скажутся на результатах применения критерия.
Приложение J
(справочное)
Сведения о соответствии межгосударственных стандартов ссылочным международным стандартам
Таблица J.1
|
Обозначение ссылочного международного стандарта |
Обозначение и наименование соответствующего межгосударственного стандарта |
|
ИСО 2041:1990 |
ГОСТ 24346-80* Вибрация. Термины и определения (NEQ) |
|
ИСО 2631-1:1997 |
ГОСТ 31191.1-2004 (ИСО 2631-1:1997) Вибрация и удар. Измерение общей вибрации и оценка ее воздействия на человека. Часть 1. Общие требования (MOD) |
|
ИСО 2631-2:2003 |
ГОСТ 31191.2-2004 (ИСО 2631-2:2003) Вибрация и удар. Измерение общей вибрации и оценка ее воздействия на человека. Часть 2. Вибрация внутри зданий (MOD) |
|
ИСО 2631-4:2001 |
ГОСТ 31191.4-2006 (ИСО 2631-4:2001) Вибрация и удар. Измерение общей вибрации и оценка ее воздействия на человека. Часть 4. Руководство по оценке влияния вибрации на комфорт пассажиров и бригады рельсового транспортного средства (MOD) |
|
ИСО 5347 (все части) |
** |
|
ИСО 5348:1998 |
ГОСТ ИСО 5348-2002 Вибрация и удар. Механическое крепление акселерометров (IDT) |
|
ИСО 5349-1:2001 |
ГОСТ 31192.1-2004 (ИСО 5349-1:2001) Вибрация. Измерение локальной вибрации и оценка ее воздействия на человека. Часть 1. Общие требования (MOD) |
|
ИСО 16063 (все части) |
** |
|
МЭК 61000-4-2:2001 |
** |
|
МЭК 61000-4-3:2002 |
** |
|
МЭК 61000-4-6:2004 |
** |
|
МЭК 61000-6-2:2005 |
** |
|
МЭК 61260:1995 |
ГОСТ 17168-82* Фильтры электронные октавные и третьоктавные. Общие технические требования и методы испытаний (NEQ) |
|
CISPR 22:2003 |
** |
|
GUM |
** |
|
* Соответствующий межгосударственный стандарт является неэквивалентным по отношению к его международному аналогу, поэтому рекомендуется вместе с межгосударственным стандартом использовать перевод соответствующего международного стандарта на русский язык. ** Соответствующий национальный или межгосударственный стандарт отсутствует. До его принятия рекомендуется использовать перевод данного международного стандарта на русский язык. |
|
Библиография
|
ИСО 1683:1983 |
Акустика. Предпочтительные опорные значения для определения уровней акустических величин |
|
|
(ISO 1683:1983) |
(Acoustics - Preferred reference quantities for acoustic levels) |
|
|
CISPR 16-1-1:2006 |
Технические требования к аппаратуре для измерения радиопомех и помехозащищенности и методы измерений. Часть 1-1. Аппаратура для измерения радиопомех и помехозащищенности. Измерительная аппаратура |
|
|
(Specification for radio disturbance and immunity measuring apparatus and methods - Part 1-1: Radio disturbance and immunity measuring apparatus - Measuring apparatus) |
||
|
МЭК 60529:2001 |
Степени защиты, обеспечиваемые оболочками (Код IP) |
|
|
(IEC 60529:2001) |
(Degrees of protection provided by enclosures (IP Code)) |
|
|
МЭК 61260:1995 |
Электроакустика. Фильтры с полосой пропускания в одну октаву и доли октавы |
|
|
(IEC 61260:1995) |
(Electroacoustics - Octave-band and fractional-octave-band filters) |
|
|
Parks T.W. and Burns C.S. |
Digital filter design, John Wiley & Sons, New York, 1987 |
|
|
МЭК 61672-1:2002 |
Электроакустика. Шумомеры. Часть 1. Технические требования |
|
|
(IEC 61672-1:2002) |
(Electroacoustics - Sound level meters - Part 1: Specifications) |
|
|
ИСО 10326-1:1992 |
Вибрация. Лабораторный метод оценки вибрации транспортных средств. Часть 1. Основные требования |
|
|
(ISO 10326-1:1992) |
(Mechanical vibration - Laboratory method for evaluating vehicle seat vibration - Part 1: Basic requirements) |
Ключевые слова: вибрация, средства измерений, датчик, измерительный блок, функция частотной коррекции, полосовой фильтр, амплитудно-частотная характеристика, фазовая характеристика, поверка